Saat kuselesaikan bab ini, kuingin dapat melakukan hal-hal berikut.
• Menyelesaikan model dinamik linear orde satu dan dua secara analitis
• Menyatakan model dinamik kedalam fungsi alih (transfer function)
• Memperkirakan fitur penting dari perilaku dinamik dari dari model tanpa menyelesaikannya
Kerangka Kuliah
• Transformasi Laplace
• Penyelesaikan model dinamik linear • Struktur model fungsi alih
• Fitur kualitatif secara langsung dari model • Respon frekuensi
T A
Aku bisa memodelkan ini; apa lagi yang
aku perlukan? T
A
Aku suka pada
• elemen model secara
individual • mengkombinasi sesuai kebutuhan • menentukan fitur dinamik kunci tanpa menyelesaikan
T A
Aku suka pada
• elemen model secara
individual
• Ini akan ada sebuah
“fungsi alih”
Kini, aku bisa
menggabungkan elemen untuk memodelkan
Bahkan yang lebih
menakjubkan, aku bisa menggabungkan untuk menurunkan sebuah model yang
disederhanakan!
Kenapa Kita Perlu Pemodelan Dinamik Lagi
Kini, aku bisa
menggabungkan elemen untuk memodelkan
Bagaimana Melihat Perilaku Dinamik
Proses?
PROSES (Dinamik) Persamaan Differensial Fungsi Transformasi LAPLACE F(s) Solusi NUMERIK Pemodelan Teorema TL Eu ler RK , dll FUNGSI WAKTU f(t) Ekspansi dan TLB Input: Sinyal uji (step, ramp, dll)M
A
T
L
A
B
LinearisasiTransformasi Laplace
Berlaku hanya pada Persamaan
Differensial (PD) linear: merubah PD
menjadi persamaan aljabar
Dapat menggunakan teknik grafik untuk
meramal kinerja sistem tanpa
menyelesaikan PD tersebut (secara
numerik)
Kebanyakan proses adalah PD nonlinear
linearisasi Transformasi Laplace
(TL)
Desfinisi TL
dengan:
F(s)
: TL dari f(t)
f(t)
: fungsi waktu (ingat: proses bersifat
dinamik)
L
: simbol operasi integral Laplace
0dt
e
t
f
t
f
s
F
L
stTL dari Sinyal-sinyal Uji
1.
Unit STEP (tangga
satuan)
0 0 0 1)
(
t
ttu
0u
(
t
)
e
dt
t
u
stL
0
1
1
1
0
s
e
s
st
s
1
t
u
L
1 0 t=0 tTL dari Sinyal-sinyal Uji
2.
Pulsa (sebesar H dan berdurasi T)
t
t
T
T
t
H
t
f
(
)
0
0
0
,
sT
st st ste
H
e
H
dt
He
dt
e
t
f
1
)
(
0 0t
f
L
H 0 t=0 t t=TTL dari Sinyal-sinyal Uji
3.
Impulsa Dirac Delta function (
(t))
Ada 2 pendekatan:
Pendekatan Smith, dll.
dengan:
HT = 1 (luas)
H = 1/T
Aturan L’Hopital:
pulsa ) ( ), ( lim ) ( 0 fungsi t f t f t T
(tdk
didefinisi
kan)
L
00 0 1 1 0(
1
)
(
1
1
)
lim
sT Ts Te
t
0 t=0 t
1
1
lim
1
lim
0 0
t
L
t
L
s
se
Ts
e
sT T dT d sT dT d TTL dari Sinyal-sinyal Uji
Pendekatan Luyben
,
)
(
)
(
dt
t
du
t
t T
Te
t
u
/ 01
lim
)
(
T t Te
dt
d
/ 01
lim
L
t
L
1
1
lim
1
lim
lim
0 1 1 0 / 0e
s
TTs
T T T T t T T 1£
t
1
L
TL dari Sinyal-sinyal Uji
4.
Gelombang Sinus (amplitudo satuan dan
frekuensi )
1
,
2
sin
i
i
e
e
t
t i t i
0sin
sin
tt
te
stdt
L
i
e
si tdt
e
si tdt
0 ) ( 0 ) ( 2 1 0 ) ( ) ( 2 1
i s s i s s s i t s i t i 2 2 2 1 2 2 1 1 0 1 0 s i i i s i s i
sin
2 2
s
t
L
1 0 t=T t
0
dt
e
t
f
s
f
t
f
L
(
(
))
(
)
(
)
st
s
C
e
s
C
dt
Ce
C
L
s s st st
0 0)
(
:
Tetap
Perubahan step (Step Change) pada t=0: Tetap sama untuk t=0 sampai t=
LANGKAH PERTAMA: Transformasi Laplace
0
dt
e
t
f
s
f
t
f
L
(
(
))
(
)
(
)
st
0 / 0 0 / /)
1
(
))
1
((
e
e
e
dt
e
dt
e
e
dt
L
t t st st t st
/
s
e
/
s
dt
e
( / s)t ( / s)t 1 0 1 1 0 11
1
Kita sering melihat bagian ini! Itu adalah
respon step untuk sistem dinamik
orde satu.
Mari kita pertimbangkan aliran mampat (plug flow) melewati pipa. Aliran mampat tidak punya backmixing
Apa respon dinamik dari sifat fluida yang keluar (yakni, konsentrasi) terhadap step change pada sifat fluida yang masuk?
Mari kita pelajari respon dinamik baru
dan TL-nya
Mari kita pelajari respon dinamik baru
dan TL-nya
Xout
= dead time
Apa harga waktu tunda (dead time)
untuk plug flow?
20 0 1 2 3 4 5 6 7 8 9 10 -0.5 0 0.5 1 time Y , o u tl e t fr o m d e a d t im e 0 1 2 3 4 5 6 7 8 9 10 -0.5 0 0.5 1 X , in le t to d e a d t im e
Mari kita pelajari respon dinamik baru
dan TL-nya
• Apa ini
dead time?
• Berapa
harganya?
Mari kita pelajari respon dinamik baru
dan TL-nya
Model dinamik untuk dead time adalah
)
t
(
X
)
t
(
X
out
in
Transformasi Laplace untuk variabel setelah dead time adalah
Pabrik kita punya pipa. Kita akan menggunakn
bagian ini!
Kita perlu TL dari turunan untuk menyelesaikan model dinamik. Turunan pertama: Umum:
0
t
)
t
(
f
)
s
(
sf
dt
)
t
(
df
L
konstan
0 1 1 0 1 0 1 t n n t n t n n n ndt
)
t
(
f
d
....
dt
)
t
(
df
s
)
t
(
f
s
)
s
(
f
s
dt
)
t
(
f
d
L
konstanAku dalam kesedihan perlu banyak contoh!
Textbook Example 3.2: CSTR (atau mixing tank) mengalamai step pada komposisi umpan dengan semua variabel lainnya tetap. Tentukan respon dinamiknya. F A A A A
F(C'
C'
)
VkC'
dt
dC'
V
0
kV
F
F
K
dan
kV
F
V
dengan
' 0 ' '
AC
AKC
Adt
dC
Aku harap kita
mendapatkan jawaban yang
Menyelesaikan Model Menggunakan
Transformasi Laplace
A A kC r B A F CA0 V1 CA1 V2 CA2
Dua CSTR isotermal mula-mula pada keadaan tunak dan mengalami
perubahan step ke komposisi umpan tangki pertama. Rumuskan model CA2.
2 2 1 2 2 1 1 0 1 1 A A A A A A A A
VkC'
)
C'
F(C'
dt
dC'
V
VkC'
)
C'
F(C'
dt
dC'
V
' ' ' ' ' ' 1 2 2 2 2 0 1 1 1 1 A A A A A AC
K
C
dt
dC
C
K
C
dt
dC
Jauh lebih mudah dari pada faktor
integrasi!
Menyelesaikan Model Menggunakan
Transformasi Laplace
Textbook Example 3.5: Komposisi umpan mengalami step. Semua variabel lainnya tetap. Tentukan respon dinamik dari CA.
2
kC
r
B
A
F CA0 V CA Non-linear!
Menyelesaikan Model Menggunakan
Transformasi Laplace
Mari kita mengatur kembali TL dari model dinamik
Y(s) X(s) G(s)
Y(s) = G(s) X(s)
FUNGSI ALIH adalah output variable, Y(s), dibagi dengan input variable, X(s), dengan semua kondisi awalnya nol.
G(s) = Y(s)/X(s)
FUNGSI ALIH: Model Valid untuk
Sembarang Fungsi Input
Y(s) X(s) G(s)
G(s) = Y(s)/ X(s)
• Bagaimana kita mencapai kondisi awal nol untuk
setiap model?
• Kita tidak punya “yang utama” pada variabel;
kenapa?
• Apa ini dibatasi oleh step input?
• Bagaimana dengan model non-linear?
FUNGSI ALIH: Model Valid untuk
Sembarang Fungsi Input
Y(s) X(s) G(s) G(s) = Y(s)/ X(s) Beberapa contoh:
?
)
(
)
(
)
(
:
CSTR
Dua
?
)
(
)
(
)
(
:
tank
Mixing
0 2 0
s
G
s
C
s
C
s
G
s
C
s
C
A A A AFUNGSI ALIH: Model Valid untuk
Sembarang Fungsi Input
Y(s) X(s) G(s)
G(s) = Y(s)/ X(s)
Kenapa kita melakukan ini?
• Untuk menyusahkan mahasiswa.
• Kita punya model individual yang kita dapat
kombinasikan secara model - secara aljabar.
• Kita bisa menentukan banyak informasi tentang
Aku pilih
jawaban pertama!
FUNGSI ALIH: Model Valid untuk
Sembarang Fungsi Input
T
open
m
s
v
s
F
s
G
valve%
.
)
(
)
(
)
(
0
10
31
250
2
1
3 0 1
s
m
K
s
F
s
T
s
G
.
/
)
(
)
(
)
(
tank11
300
0
1
1 2
s
K
K
s
T
s
T
s
G
.
/
)
(
)
(
)
(
tank21
10
0
1
2
s
K
K
s
T
s
T
s
G
sensor measured/
.
)
(
)
(
)
(
(Waktu dalam detik)
Mari kita lihat bagaimana mengkombinasikan
model
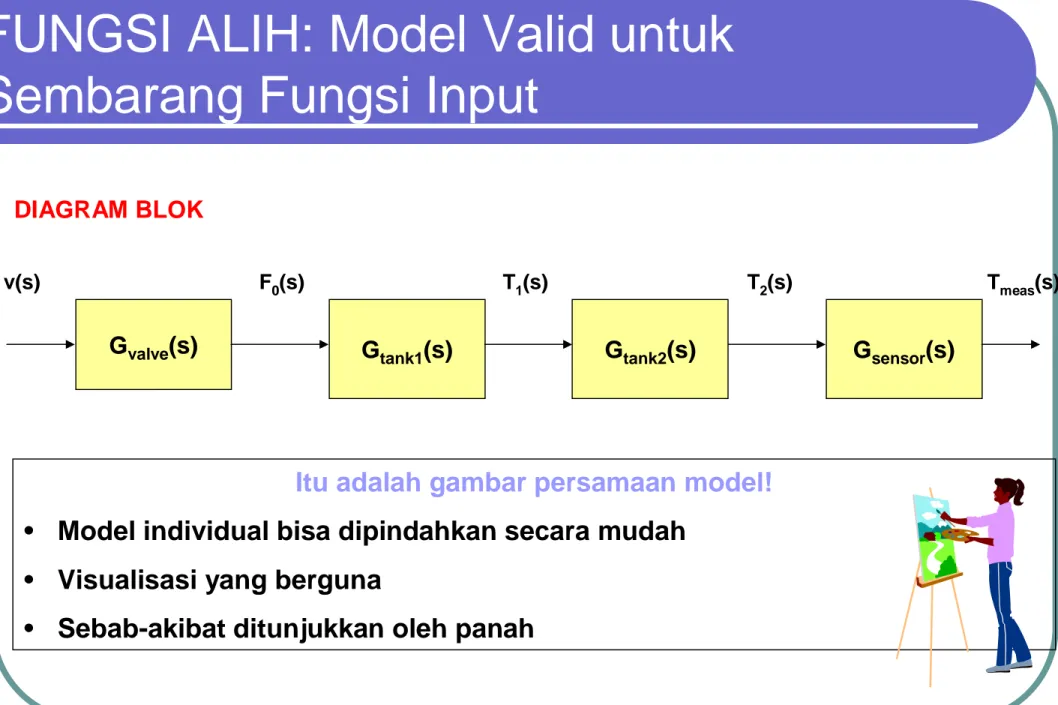
FUNGSI ALIH: Model Valid untuk
Sembarang Fungsi Input
DIAGRAM BLOK
Gvalve(s) G
tank2(s)
Gtank1(s) Gsensor(s)
v(s) F0(s) T1(s) T2(s) Tmeas(s)
Itu adalah gambar persamaan model! • Model individual bisa dipindahkan secara mudah
• Visualisasi yang berguna
FUNGSI ALIH: Model Valid untuk
Sembarang Fungsi Input
Kombinasi menggunakan ALJABAR DIAGRAM BLOK Gvalve(s) G tank2(s) Gtank1(s) Gsensor(s) v(s) F0(s) T1(s) T2(s) Tmeas(s)
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
1 2 0 0 1 1 2 2s
G
s
G
s
G
s
G
s
v
s
F
s
F
s
T
s
T
s
T
s
T
s
T
s
G
s
v
s
T
v T T s meas meas
G(s) v(s) Tmeas(s)FUNGSI ALIH: Model Valid untuk
Sembarang Fungsi Input
Aturan kunci ALJABAR DIAGRAM BLOK
FUNGSI ALIH: Model Valid untuk
Sembarang Fungsi Input
FINAL VALUE THEOREM: Evaluasi katup akhir dari output model dinamik tanpa menyelesaikan keseluruhan respon transien.
sY(s)
lim
)
(
s
t
t
Y
Contoh sistem orde satu
p A p A s t A
C
K
)
s
(
s
K
C
lim
|
)
t
(
C
0 0 01
..)
(
...
)
(
t t t t pe
t
B
t
B
B
e
A
e
A
A
t
Y
2 2 1 0 2 1 0 2 1Apa dinamik dapat kita tentukan tanpa
menyelesaikan?
Kita bisa menggunakan ekspansi fungsi parsial untuk membuktikan hasil kunci berikut.
Y(s) = G(s)X(s) = [N(s)/D(s)]X(s) = C1/(s-1) + C2/(s-2) + ...
Dengan i solusi untuk penyebut dari fungsi alih menjadi nol, D(s) = 0.
..)
(
...
)
(
t t t t pe
t
B
t
B
B
e
A
e
A
A
t
Y
2 2 1 0 2 1 0 2 1...
(
..)
)
(
t t t t pe
t
B
t
B
B
e
A
e
A
A
t
Y
2 2 1 0 2 1 0 2 1Dengan i solusi untuk D(s) = 0, adalah polinomial.
...
)]
sin(
)
cos(
[
...
..)
(
...
)
(
t t t t q pe
t
C
t
C
e
t
B
t
B
B
e
A
e
A
A
t
Y
2 1 2 2 1 0 2 1 0 2 11. Jika semua i adalah ???, Y(t) stabil
Jika satu saja i adalah ???, Y(t) is tidak stabil 2. Jika semua i adalah ???, Y(t) overdamped
(tidak berosilasi)
Jika sepasang i adalah ???, Y(t) underdamped
Melengkapi
Pernyataan didasarkan pada persamaan.
A A kC r B A F CA0 V1 CA1 V2 CA2 ' ' ' ' ' ' 1 2 2 2 2 0 1 1 1 1 A A A A A A
C
K
C
dt
dC
C
K
C
dt
dC
1. Apa sistem ini stabil?
2. Apa sistem ini over- atau underdamped? 3. Berapa orde sistem tersebut?
(Orde = jumlah turunan antara variabel input dan
Tanpa
menyelesaikan!
RESPON FREKUENSI: Respon terhadap input sinus dari variabel output adalah hal penting yang sangat praktis. Kenapa?
Input sinus hampir tidak pernah terjadi. Meski demikian, banyak gangguan yang terjadi secara periodik dan input lain dapat diwakili dengan sebuah kombinasi sinus.
Untuk proses tanpa kendali, kita inginkan sebuah input sinus agar memiliki efek yang kecil pada output.
0 1 2 3 4 5 6 -0.4 -0.2 0 0.2 0.4 time Y , o u tl e t fr o m s ys te m 1 output B P P’
Amplitude ratio = |Y’(t)| max / |X’(t)| max
Phase angle = beda fasa antara input dan output
Amplitude ratio = |Y’(t)| max / |X’(t)| max
Phase angle = beda fasa antara input dan output
Untuk sistem linear, kita bisa mengevaluasi secara langsung menggunakan fungsi alih! Tentukan s = j, dengan = frekuensi dan j = variabel kompleks.
))
(
Re(
))
(
Im(
tan
)
(
angle
Phase
))
(
Im(
))
(
Re(
)
(
Ratio
Amp.
j
G
j
G
j
G
j
G
j
G
j
G
AR
1 2 2Perhitungan ini membosankan bila dilakukan dengan tangan., tapi mudah jika menggunakan bahasa pemrograman standar.
Example 4.15 Respon frekuensi dari mixing tank.
Perilaku sebagai fungsi waktu
Bode Plot - Menunjukkan
respon frekuensi untuk sebuah daerah frekuensi
• Log (AR) vs log() • Phase angle vs log()
Fitur Kualitatif Tanpa Menyelesaikan
F CA0 V1 CA1 V2 CA2
Gangguan sinus dengan amplitudo = 1 mol/m3 frekuensi = 0.20 rad/min = 8.25 min., Kp = 0.448 Harus punya fluktuasi < 0.050 mol/m3 CA2
Menggunakan persamaan untuk rasio amplitudo (AR) respon frekuensi
050
.
0
12
.
0
)
12
.
0
)(
0
.
1
(
|
|
))
25
.
8
)(
2
.
0
(
1
(
448
.
0
)
0
.
1
(
)
1
(
|
|
|
|
)
1
(
|
)
(
|
|
|
|
|
2 2 2 2 2 0 2 2 2 0 2
A p A A p A AC
K
C
C
K
j
G
C
C
Ditolak. Kita perlu
mengurangi variabilitasnya. Bagaimana dengan feedback
control?
Data dari 2 CSTR
Kita bisa menentukan model secara individual
dan kombinasi
1. Orde sistem 2. Final Value 3. Stabilitas 4. Damping
Kita bisa menentukan fitur ini tanpa menyelesaikan
keseluruhan transiennya
Fungsi alih dan diagram blok
44
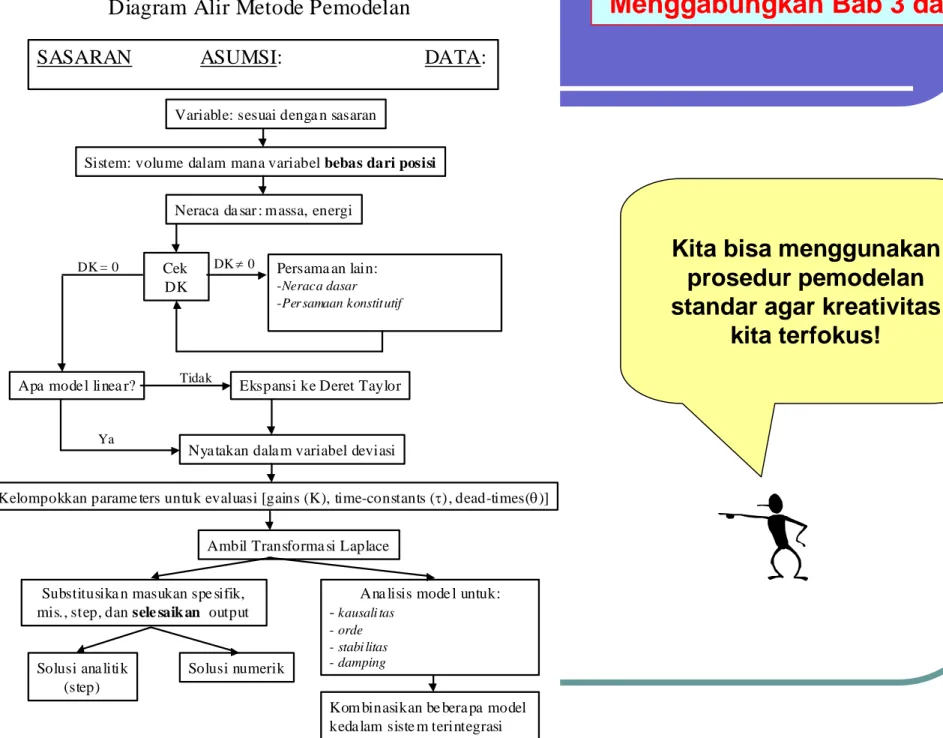
Diagram Alir Metode Pemodelan
SASARAN ASUMSI: DATA:
Variable: sesuai denga n sasaran
Sistem: volume dalam mana variabel bebas dari posisi Neraca da sar : massa, energi
Cek DK
Apa mode l linea r? Ekspansi ke Deret Taylor
DK = 0 Persama an lain:
-Neraca dasar -Per samaan konstit utif DK 0
Tidak
Nya takan dala m variabel deviasi
Kelompokkan parame ters untuk evaluasi [gains (K), time-constants (), dead-times()] Ambil Transforma si Laplace
Substitusika n masukan spe sifik, mis., step, dan sele saik an output Solusi ana litik
(step)
Solusi numerik
Ana lisis mode l untuk: - kausali tas
- orde - stabi litas - damping Ya
Kom binasikan be bera pa model
Kita bisa menggunakan prosedur pemodelan standar agar kreativitas
kita terfokus!
Contoh 3.6 Tangki dengan sebuah saluran pembuangan mempunyai aliran masuk dan keluar yang kontinyu. Tangki telah mencapai keadaan tunak saat sebuah penurunan step terjadi ke aliran masuk. Tentukan level sebagai fungsi waktu.
Selesaikan model yang dilinearisasi menggunakan transformasi Laplace
Bab 4: Pemodelan dan Analisis - WORKSHOP 1
Model dinamik non-isothermal CSTR diturunkan pada Appendix C. Contoh khusus memiliki fungsi alih berikut.
Tentukan fitur dalam tabel
)
.
.
(
)
.
.
(
)
(
)
(
80
35
79
1
83
45
07
6
2
s
s
s
s
F
s
T
c T A 1. Orde sistem 2. Final Value 3. StabilitasF CA0 V1 CA1 V2 CA2
Jawablah yang berikut menggunakan program MATLAB.
Menggunakan fungsi alih yang diturunkan pada Example 4.9, tentukan respon frekuensi untuk CA0 CA2. Cek satu titik pada grafik dengan perhitungan
tangan.
Kita sering mengukur tekanan proses untuk memonitor dan mengontrol.
Jelaskan tiga prinsip untuk sensor, seleksi satu untuk P1 dan jelaskan pilihanmu.
Feed Vapor product F1 F2 F3 T1 T2 T3 T5 T4 T6 P1 L1
Banyak perbaikan, tapi kita perlu beberapa studi lagi!
• Baca textbook
• Tinjau catatannya, khususnya tujuan pembelajaran dan workshop
• Uji coba nasihat-nasihat belajar mandiri
• Alaminya, kita seharusnya punya tugas (assignment)!
• Menyelesaikan model dinamik linear orde satu dan dua secara analitis
• Menyatakan model dinamik kedalam fungsi alih (transfer function)
• Memperkirakan fitur penting dari perilaku dinamik dari dari model tanpa menyelesaikannya
Saat saya menyelesaikan bab ini, saya ingin dapat melakukan hal-hal berikut.
• Home page
- Instrumentation Notes
- Interactive Learning Module (Chapter 4) - Tutorials (Chapter 14)
• Perangkat lunak - MATLAB
• Buku ajar lain Pengendalian Proses
1. Kenapa variabel dinyatakan sebagai variabel deviasi saat kita mengembangkan fungsi alih?
2. Diskusikan beda antara reaksi orde dua dan model dinamik orde dua. 3. Untuk masukan sinus ke proses, apakah keluarannya sinus untuk
a. Pabrik linear?
b. Pabrik non-linear?
4. Apakah amplitude ratio dari sebuah pabrik selalu sama dengan atau lebih besar dari pada steady-state gain-nya?
5. Hitung respon frekuensi untuk model pada Workshop 2 menggunakan MATLAB. Diskusikan hasilnya.
6. Putuskan sebuah model yang dilinearisasi apakah yang seharusnya digunakan pada fired heater untuk
FT 1 PT 1 PIC 1 AT 1 TI 1 TI 2 TI 3 TI 4 PI 4 TI 5 TI 6 TI 7 TI 9 TI 10 PI 5
a. Kenaikan 3% pada laju alir bahan bakar.
b. Perubahan 2% pada laju alir bahan bakar.
c. Start up dari suhu lingkungan.
d. Penghentian darurat aliran
feed