BAB II
DASAR TEORI
Pada bab ini akan dijelaskan dasar teori yang digunakan dalam perancangan skripsi ini. Teori-teori yang digunakan dalam pembuatan skripsi ini terdiri dari mikrokontroler Arduino MEGA 2560, motor DC, driver motor, kontrol PID, dan display.
2.1 Arduino MEGA 2560
Arduino MEGA 2560 merupakan board mikrokontroler yang memiliki prosesor berupa ATmega2560. Board ini memiliki 54 input/output (15 diantaranya dapat digunakan sebagai output PWM), 16 analog input, sebuah osilator kristal 16MHz, koneksi USB, sebuah power jack, sebuah header ICSP, dan sebuah tombol reset. Berikut merupakan spesifikasi dari Arduino MEGA 2560:
1. Microcontroller : Atmega2560 2. Operating Voltage : 5V
Gambar 2.1 Arduino MEGA 2560
2.2 Motor DC
Motor DC yang digunakan merupakan motor DC 12 Volt keluaran Pololu, digabungkan dengan gearbox dengan rasio 74,83:1, dan memiliki 48 CPR quadrature encoder sehingga menghasilkan 3591 count per putaran as keluaran gearbox. Berikut merupakan spesifikasi motor DC:
1.Gear ratio : 74.83:1 2. Free-run speed @ 6V : 35 rpm 3. Stall current @ 6V : 550 mA 4. Stall torque @ 6V : 0.29 Nm 5. Free-run speed @ 12V : 71 rpm 6. Free-run current @ 12V : 100 mA 7. Stall current @ 12V : 1100 mA 8. Stall torque @ 12V : 0.6 Nm 9. Lead length : 8 in
Gambar 2.2 Motor DC
2.3 Driver Motor
Driver motor yang digunakan berupa Shield Arduino, sehingga dapat langsung dipasang pada Arduino tanpa menggunakan konektor tambahan. Driver ini dapat digunakan untuk mengontrol 2 motor sekaligus, pin 4 dan 7 digunakan untuk menentukan arah putar motor, dan pin 5 dan 6 digunakan untuk memberi input PWM. Berikut merupakan spesifikasi driver motor:
1. Logic Control Voltage:5V (From Arduino)
2. Motor Driven Voltage:4.8~35V (From Arduino or External Power Source) 3. Logic supply current Iss:≤36mA
4. Motor Driven current Io:≤2A
5. Maximum power consumption:25W T=75℃ 6. PWM、PLL Speed control mode
7. Control signal level:
Gambar 2.3 Driver Motor
2.4 Kontrol PID
Sebuah kontroler proporsional-integral-derivatif (PID controller) adalah
mekanisme kontrol umpan balik yang biasa digunakan dalam sistem kontrol industri.
Kontroler PID menghitung besarnya nilai error sebagai perbedaan antara proses yang
terukur dengan set point yang diinginkan. Kontroler PID digunakan untuk mengupayakan
dan meminimalkan error setiap waktunya dengan menyesuaikan output proses kontrol
[3].
Dengan u(t) sebagai output maka bentuk dari PID adalah [4]:
= �� +�
Persamaan Pengontrol PID diatas dapat juga dituliskan sebagai berikut :
Pengendali proporsional dapat meningkatkan kecepatan respon dan akurasi kontrol dari sistem. Nilai parameter Kp yang lebih besar akan mempercepat respon dan
meningkatkan akurasi. Namun, jika Kp terlalu besar, maka akan terjadi over-shoot yang
besar dan sistem menjadi cenderung tidak stabil. Tetapi, jika Kp terlalu kecil, akurasi
kontrol akan berkurang dan waktu mencapai kesetabilan akan bertambah lama.
Pengendali Integral (I)
Pengendali integral digunakan untuk menghilangkan steady-state error pada sistem. Dengan nilai parameter Ki yang besar, maka steady-state error dapat dihilangkan/diatasi
dengan lebih cepat. Namun, jika parameter Ki terlalu besar, akan terdapat proses
penambahan yang menumpuk pada awal proses kendali yang menyebabkan timbulnya over-shoot yang besar. Tetapi, jika nilai Ki terlalu kecil, maka akan sangat sulit untuk
mengeliminasi steady-state error.
Pegendali Difrensial (D)
Pengendali diferensial dapat meningkatkan kinerja dinamis dari sistem. Pengendali diferensial juga dapat menghambat dan memprediksi error. Namun, jika parameter Kd
Rise Time
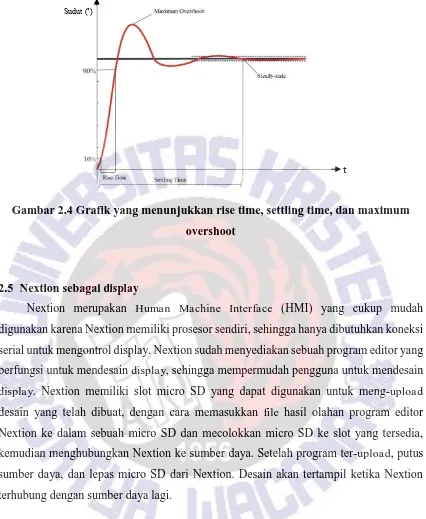
Rise time merupakan waktu yang dibutuhkan sinyal untuk berubah dari nilai rendah tertentu ke nilai tinggi tertentu. Nilai yang umumnya digunakan adalah sebagai berikut, untuk nilai rendah berada pada 10% dari set point dan posisi awal sinyal, dan nilai tinggi berada pada 90% dari set point dan posisi awal sinyal.
Settling Time
Settling time merupakan waktu yang dibutuhkan sinyal untuk mencapai keadaan tunak (steady-state). Pada umumnya sistem dikatakan stabil ketika error yang dimiliki sistem bernilai kurang dari 2% dari set point.
Pada skripsi ini kondisi stabil didefinisikan ketika errorbernilai kurang dari 1˚ dari set point, hal ini dikarenakan cukup sulit untuk mencapai nilai error kurang dari 2% pada
sistem yang memiliki nilai set point bernilai 0 sampai 360˚.
Maximum Overshoot
Maximum overshoot merupakan nilai tertinggi yang melebihi set point yang ditentukan.
Steady-state Error
Gambar 2.4 Grafik yang menunjukkan rise time, settling time, dan maximum
overshoot
2.5 Nextion sebagai display
Nextion merupakan Human Machine Interface (HMI) yang cukup mudah digunakan karena Nextion memiliki prosesor sendiri, sehingga hanya dibutuhkan koneksi serial untuk mengontrol display. Nextion sudah menyediakan sebuah program editor yang berfungsi untuk mendesain display, sehingga mempermudah pengguna untuk mendesain display. Nextion memiliki slot micro SD yang dapat digunakan untuk meng-upload desain yang telah dibuat, dengan cara memasukkan file hasil olahan program editor Nextion ke dalam sebuah micro SD dan mecolokkan micro SD ke slot yang tersedia, kemudian menghubungkan Nextion ke sumber daya. Setelah program ter-upload, putus sumber daya, dan lepas micro SD dari Nextion. Desain akan tertampil ketika Nextion terhubung dengan sumber daya lagi.
t
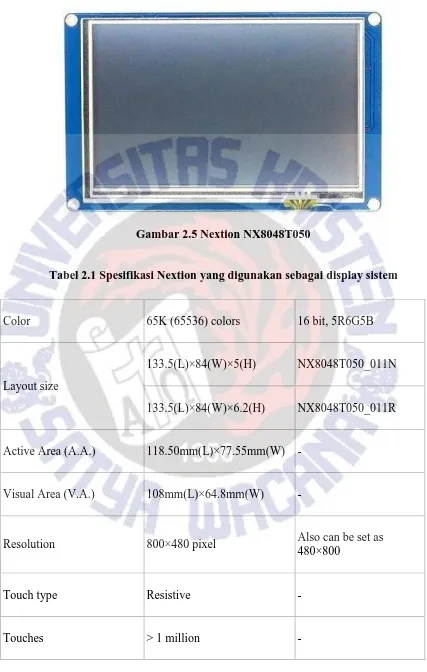
Gambar 2.5 Nextion NX8048T050
Tabel 2.1 Spesifikasi Nextion yang digunakan sebagai display sistem
Color 65K (65536) colors 16 bit, 5R6G5B
Layout size
133.5(L)×84(W)×5(H) NX8048T050_011N
133.5(L)×84(W)×6.2(H) NX8048T050_011R
Active Area (A.A.) 118.50mm(L)×77.55mm(W) -
Visual Area (V.A.) 108mm(L)×64.8mm(W) -
Resolution 800×480 pixel Also can be set as 480×800
Touch type Resistive -
Backlight LED -
Backlight lifetime (Average) >30,000 Hours -
Brightness
250nit(NX8048T050_011N) 0% to 100%, the interval of adjustment is 1%
230 nit
250nit(NX8048T050_011R)
0% to 100%, the interval of adjustment is 1%
Weight
108g (NX8048T050_011N) -