Klasifikasi Kendaraan di Jalan Tol dengan
Menerapkan Metode Local Binary Pattern
dan Linear Discriminant Analysis
Afrizal Firdaus
1, Bedy Purnama
2, Untari Novia Wisesty
3Fakultas Informatika, Universitas Telkom
Jl. Telekomunikasi Terusan Buah Batu, Bandung, Indonesia 1 [email protected]
2 [email protected] 3 [email protected]
Abstract
Classification of vehicles on the highway is important to know what type of vehicles through the area. But it certainly requires a great effort if the job is done by human observation. Computer vision is a branch of science that could replace the role of experts in conducting visual assessments. By using computer vision can certainly help the human’s job to observe the visual object especially in large quantities. This study uses a video taken by a camcorder in Pasir Koja toll road by using 2 datasets at different locations. The method used in this study was Gaussian Mixture Model as a method to separate background and foreground, Local Binary Patterns as feature extraction method, and Linear Discriminant Analysis as classification method. The best test results obtained when testing using LBP parameter radius 2, the distribution of the region into 25 pieces, and the image size of 60x60 pixels. The test results obtained by calculating the average F1 measure and obtained the value of 82.33%.
Keywords: GMM, LBP, LDA, classification, toll road
Abstrak
Klasifikasi kendaraan pada jalan tol merupakan hal yang penting untuk mengetahui jenis kendaraan apa saja yang melalui daerah tersebut. Namun hal tersebut tentunya membutuhkan usaha yang besar jika pekerjaan tersebut dilakukan oleh pengamatan manusia. Computer vision merupakan suatu cabang keilmuan yang mampu menggantikan peran tenaga ahli dalam melakukan penilaian visual. Dengan menggunakan computer vision tentunya dapat membantu pekerjaan manusia untuk mengamati objek visual terlebih lagi jika dalam jumlah banyak. Penelitian ini menggunakan video yang diambil menggunakan handycam di jalan tol Pasir Koja dengan menggunakan 2 buah dataset di lokasi yang berbeda. Metode yang digunakan dalam penelitian ini adalah Gaussian Mixture Model sebagai metode untuk memisahkan background dan foreground, Local Binary Pattern sebagai metode ekstraksi ciri, dan Linear Discriminant Analysis sebagai metode klasifikasi. Hasil pengujian terbaik didapatkan ketika melakukan pengujian dengan menggunakan parameter LBP radius 2, pembagian jumlah region menjadi 25 buah, dan ukuran citra 60x60 piksel. Hasil pengujian didapatkan dengan menghitung F1 measure rata-rata dan didapatkan nilai 82.33%.
Kata Kunci: GMM, LBP, LDA, klasifikasi, jalan tol
ISSN 2460-3295
socj.telkomuniversity.ac.id/indosc
Ind. Symposium on Computing Sept 2016. pp. 285-296 doi:10.21108/indosc.2016.158
I. PENDAHULUAN
ALAN tol merupakan jalan bebas hambatan yang dapat dilalui oleh kendaraan roda empat atau lebih. Kendaraan roda empat atau lebih terbagi menjadi beberapa jenis yaitu mobil, bus, dan truk. Dengan berbagai macam jenis kendaraan, tentunya diperlukan mesin yang dapat mengklasifikasikan jenis kendaraan yang melewati suatu area. Pengklasifikasian jenis kendaraan ini dapat diterapkan pada CCTV jalan tol sehingga dapat diperoleh informasi jumlah dan jenis kendaraan apa yang melalui area tersebut. Dengan begitu informasi tersebut dapat digunakan oleh petugas jalan tol untuk mengambil keputusan berapa jumlah gerbang mobil dan gerbang truk/bus yang diperlukan pada pintu keluar jalan tol tersebut. Selain itu, informasi tersebut membantu untuk mendeteksi secara dini kemungkinan kemacetan yang akan terjadi sehingga petugas jalan tol dapat mengambil tindakan sebelum kemacetan terjadi. Informasi ini juga dapat digunakan sebagai bahan pertimbangan ketika akan melakukan perluasan jalan tol.
Penelitian ini telah banyak dilakukan sebelumnya dengan menggunakan metode lain seperti Neural Network dengan performansi sebesar 62% dan Automatic Traffic Surveillance System dengan performansi sebesar 82% [1]. Proses klasifikasi pada kendaraan roda 4 atau lebih pada penelitian ini dilakukan menggunakan metode Linear Discriminant Analysis (LDA) dengan metode Local Binary Pattern (LBP) sebagai ekstraksi ciri. LBP dapat memberikan ciri penting berupa tekstur dari kendaraan yang dideteksi [2]. Kendaraan dapat di bedakan jenisnya menjadi mobil, truk, dan bis berdasarkan teksturnya karena masing-masing jenis kendaraan memiliki tekstur yang berbeda [3]. Metode LDA terbukti akurat dalam mengklasifikasi objek serta kompleksitas komputasinya kecil dikarenakan adanya proses reduksi dimensi [4]. Tahapan preprocessing yang akan digunakan adalah Gaussian Mixture Model, yaitu metode yang digunakan untuk memisahkan background dengan foreground [5].
Beberapa masalah yang dihadapi antara lain: bagaimana membangun sistem yang mampu mengklasifikasikan setiap kendaraan yang melewati suatu area pada CCTV jalan tol berbasis video; dan bagaimana tingkat akurasi dan performansi sistem dengan menggunakan metode Local Binary Pattern dan Linear Discriminant Analysis dalam menangani klasifikasi kendaraan berbasis video. Penelitian dilakukan dengan batasan lingkup sebagai berikut: (a) Video diambil pada siang hari dengan kondisi cuaca cerah, (b) lokasi pengambilan video adalah di jalan tol Pasir Koja KM 1 dan KM 137, (c) tidak menangani oklusi, (d) hanya mengklasifikasi kendaraan roda empat atau lebih di jalan tol, (e) kamera video mengarah ke bagian depan kendaraan, dan (f) data latih dan data uji diambil dari lokasi dan sudut pengambilan video yang sama.
II.KAJIAN PUSTAKA
A. Computer Vision
Computer Vision adalah suatu ilmu pada bidang komputer yang mempelajari bagaimana mesin mampu
mengekstsrak informasi dan dapat mengenali objek yang diamatinya. Cabang ilmu ini bersama Artificial
Intelligence akan mampu menghasilkan Visual Intelligence System. Pebedaannya adalah Computer Vision lebih
mempelajar bagaimana komputer dapat mengenali objek yang diamatinya [6]. Computer Vision adalah kombinasi dari:
1) Pengolahan citra: Bidang yang berhubungan dengan proses tranformasi citra/gambar sehingga
mendapatkan kualitas gambar yang lebih baik.
2) Pengenalan pola: Bidang yang berhubungan dengan proses identifikasi objek pada citra atau interpretasi citra yang bertujuan untuk mengekstrak informasi atau pesan yang disampaikan oleh citra.
B. Gaussian Mixture Model (GMM)
J
Gaussian Mixture Model (GMM) adalah sebuah tipe density model yang terdiri dari komponen fungsi-fungsi
Gaussian. Komponen fungsi ini terdiri dari bobot yang berbeda untuk menghasilkan multi-model density [5]. Terdapat beberapa tahap proses untuk metode ini yaitu tahap pencocokan input terhadap distribusi dan tahap pemilihan distribusi yang mencerminkan background [5]. Penerapan GMM dapat dilihat pada Gambar 1.
(a) (b)
Gambar. 1. Contoh penerapan GMM pada jalan tol (a) citra asli, (b) hasil GMM
C. Local Binary Pattern (LBP)
Local Binary Pattern (LBP) merupakan suatu operasi gambar yang mentransformasikan sebuah citra
menjadi sebuah susunan label integer yang menggambarkan kenampakan skala kecil dari suatu citra. Label atau statistik tersebut, biasanya merupakan sebuah histogram, kemudian digunakan lagi untuk analisis citra yang lebih lanjut [4].
Tahapan dalam mendapatkan nilai LBP adalah dengan mendapatkan nilai transformasi biner yang akan disusun menjadi desimal. Jika intensitas tetangga yang dibandingkan lebih besar atau sama dengan intensitas pusatnya maka nilai transformasi binernya adalah 1. Sebaliknya, jika intensitas tetangga yang dibandingkannya lebih kecil daripada intensitas pusatnya maka nilai transformasi binernya adalah 0. Setelah ke-8 tetangganya dibandingkan, nilai transformasi tersebut akan disusun dan dikonversikan ke dalam bentuk desimal.
Gambar. 2. Contoh Implementasi LBP (a) Nilai Piksel pada Citra, (b) Nilai LBP dari Citra (a)
Dapat dilihat pada Gambar 2, bagian (a) merupakan piksel pada citra asli yang kemudian dilakukan ekstraksi ciri menggunakan LBP hingga dihasilkan nilai biner seperti pada Gambar 2(b). Nilai biner tersebut kemudian disusun searah jarum jam menjadi 10001111 dan dikonversi ke desimal menjadi 143. Secara umum, perhitungan LBP dapat menggunakan persamaan (9).
𝐿𝐵𝑃𝑃,𝑅= ∑ 𝑠(𝐼𝑝,𝑅− 𝐼𝐶)2𝑃−1−𝑝 𝑃−1
𝑝=0
dengan nilai 𝑠(𝑥) = {1, 𝑥 ≥ 00, 𝑥 < 0
(9)
𝑃 adalah jumlah banyaknya tetangga, 𝑅 adalah radius antara piksel pusat dengan piksel tetangga, 𝐿𝐵𝑃𝑃,𝑅
adalah nilai desimal hasil konversi nilai biner, 𝐼𝐶 adalah nilai intensitas piksel pusat, 𝐼𝑝,𝑅 adalah nilai intensitas
piksel tetangga ke- 𝑝 (𝑝 = 0,1, … , 𝑃 − 1) dengan radius 𝑅. Sedangkan 𝑠(𝑥) adalah fungsi thresholding. Tahap terakhir dalam perhitungan LBP adalah penyusunan histogram LBP. Histogram LBP dapat dibentuk seperti ilustrasi berikut.
Gambar. 3. Ilustrasi proses LBP. (a) Matriks dari citra asli. (b) Matriks hasil perbandingan. (c) Bobot. (d) Hasil perkalian Matriks (b) dan (c). (e) Histrogram ciri LBP
Pada Gambar. 3(a) diberikan matriks ukuran 3x3 dengan piksel pusat bernilai 𝐼𝑐 = 12. Piksel pusat ini
berperan sebagai threshold dan membentuk matriks baru seperti Gambar. 3(b). Kemudian nilai pada matriks Gambar. 3(b) dirangkai menjadi serangkaian bilangan biner lalu dikonversikan ke dalam bentuk integer. Selanjutnya adalah membuat histogram berdasarkan nilai LBP yang didapatkan dan akan dihasilkan histogram seperti pada Gambar. 3(e).
D. Linear Discriminant Analysis (LDA)
LDA adalah salah satu metode yang dipakai pada statistik, pengenalan pola secara umum untuk menemukan kombinasi linier dari fitur yang menjadi ciri untuk memisahkan dua atau lebih kelas objek atau peristiwa. Kombinasi yang dihasilkan dapat digunakan sebagai pengklasifikasi linier. Tujuan LDA adalah untuk mengklasifikasikan objek ke salah satu dari dua atau lebih kelompok berdasarkan serangkaian fitur yang menggambarkan kelas atau kelompok. Secara umum, menetapkan objek untuk salah satu dari sejumlah kelompok yang telah ditentukan berdasarkan pengamatan yang dilakukan pada objek. Tahapan pada LDA adalah sebagai berikut [7] [8]:
1) Matriks data masukkan: Persamaan (10)
(10)
2) Menghitung rata-rata dari masing-masing kelas: (𝜇1, 𝜇2, … , 𝜇𝑛)
3) Menghitung rata-rata vektor data dari seluruh kelas: (𝜇)
4) Menghitung nilai Covariance tiap kelas: Persamaan (11)
𝑆𝑖 = ∑ (𝑥 − 𝑢𝑖)(𝑥 − 𝑢𝑖)𝑇 𝑥 ∈ 𝜔𝑖
(11)
5) Menghitung nilai within-class scatter matrix: Persamaan (12)
𝑆𝑊= ∑ 𝑆𝑖 𝐶
𝑖=1
Di mana C = jumlah kelas.
(12)
6) Menghitung nilai beetwen-scatter matrix: Persamaan (13)
𝑋 =
[𝑥
11, 𝑥
12, … 𝑥
1𝑛]
[𝑥
21, 𝑥
22, … 𝑥
1𝑛]
𝑆𝐵= ∑ 𝑁𝑖 (𝑢𝑖− 𝑢)(𝑢𝑖− 𝑢)𝑇 𝐶
𝑖=1
Dimana Ni = jumlah data tiap kelas
(13)
7) Hitung nilai SX: Persamaan (14)
𝑆𝑋= ∑ 𝑆𝑊−1 𝐶
𝑖=1
𝑆𝐵
Dimana Ni = jumlah data tiap kelas
(14)
8) Hitung nilai eigen vektor: SX (λ) 9) Ambil nilai eigen terbesar: (λm)
10) Buatlah garis proyeksi dari eigen vektor: (y)
Gambar. 3. (a) garis proyeksi eigen vektor (b) grafik peluang kemunculan tiap kelas pada proyeksi dengan nilai eigen terbesar 11) Buat garis batas pada grafik perpotongan antar kelas
Gambar. 4. Garis pembatas antar kelas E. Pengukuran Performansi Sistem
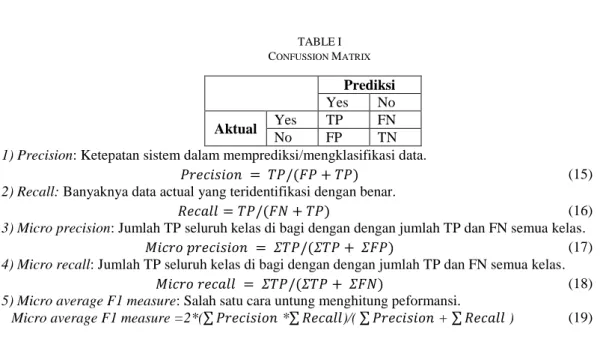
Pengukuran performansi sistem dapat diukur dengan F1 measure dan micro precision recall dengan menggunakan tabel confussion matrix, uraian tabel confussion dapat dilihat pada Tabel I.
TABLEI CONFUSSION MATRIX Prediksi Yes No Aktual Yes TP FN No FP TN
1) Precision: Ketepatan sistem dalam memprediksi/mengklasifikasi data.
𝑃𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 = 𝑇𝑃/(𝐹𝑃 + 𝑇𝑃) (15)
2) Recall: Banyaknya data actual yang teridentifikasi dengan benar.
𝑅𝑒𝑐𝑎𝑙𝑙 = 𝑇𝑃/(𝐹𝑁 + 𝑇𝑃) (16)
3) Micro precision: Jumlah TP seluruh kelas di bagi dengan dengan jumlah TP dan FN semua kelas.
𝑀𝑖𝑐𝑟𝑜 𝑝𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 = 𝛴𝑇𝑃/(𝛴𝑇𝑃 + 𝛴𝐹𝑃) (17)
4) Micro recall: Jumlah TP seluruh kelas di bagi dengan dengan jumlah TP dan FN semua kelas.
𝑀𝑖𝑐𝑟𝑜 𝑟𝑒𝑐𝑎𝑙𝑙 = 𝛴𝑇𝑃/(𝛴𝑇𝑃 + 𝛴𝐹𝑁) (18)
5) Micro average F1 measure: Salah satu cara untung menghitung peformansi.
Micro average F1 measure =2*(∑𝑃𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 *∑ 𝑅𝑒𝑐𝑎𝑙𝑙)/( ∑ 𝑃𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 + ∑ 𝑅𝑒𝑐𝑎𝑙𝑙 ) (19)
III. PERANGCANGAN SISTEM
A. Analisis Kebutuhan Sistem
Penelitian tugas akhir yang dilakukan adalah mengklasifikasikan kendaraan ke dalam 3 kategori yaitu mobil, bus, dan truk. Maka dari itu diperlukan cara untuk akuisisi data kendaraan. Data kendaraan diambil dari dua lokasi yang berbeda. Lokasi pertama adalah jalan tol Pasir Koja KM 1.600 dengan durasi sekitar 55 menit. Kemudian lokasi kedua diambil di jalan tol Pasir Koja KM 137.800 dengan durasi sekitar 67 menit. Data tersebut diambil menggunakan handycam dan disimpan dengan format mp4 dengan resolusi 1280x780 piksel kemudian di konversi menjadi resolusi 480x360 piksel agar komputasi lebih ringan..
B. Gambaran Umum Sistem
Sistem akan melalui dua buah skema utama yang harus dilalui yaitu: training dan testing. Training merupakan proses enrollment yang bertujuan untuk mendaftarkan data ciri kendaraan masing-masing kategori ke dalam database. Sedangkan testing merupakan proses yang bertujuan untuk mengklasifikasikan kendaraan berdasarkan data training yang telah disimpan pada database. Gambaran umum sistem dapat dilihat pada Gambar. 5 dan Gambar. 6.
Gambar. 6. Rancangan Sistem Uji
Berdasarkan kedua diagram diatas, dapat dilihat bawa perbedaannya terdapat pada proses klasifikasi. Proses klasifikasi menggunakan LDA akan dilakukan setelah model ciri telah dibuat maka dari itu pada saat training proses klasifikasi tidak digunakan.
C. Preprocessing
1) Gaussian Mixture Model (GMM) : Pertama-tama video akan dilakukan perhitungan menggunakan GMM
pada setiap frame-nya. Tahap pertama yang dilakukan adalah tahap pencocokan input terhadap distribusi. Setelah tahap ini dilakukan, selanjutnya adalah melakukan update parameter. Kemudian dilakukan pemilihan distribusi background sehingga didapat hasil background-nya adalah seperti pada Gambar. 7. Keluaran dari GMM adalah berupa blob atau gumpalan-gumpalan objek seperti pada Gambar. 7(b). Setelah blob dihasilkan, lakukan filtrasi untuk menghilangkan noise dengan menggunakan median filter sehingga hasilnya akan tampak seperti Gambar. 7(c) [9].
Gambar. 7. Contoh aplikasi GMM (a) citra asli. (b) Blob hasil proses GMM. (c) Clean blob
2) Segmentasi : Proses segmentasi akan melakukan pemasangan bounding box pada citra berdasarkan
koordinat blob yang dihasilkan oleh GMM seperti pada Gambar. 8(a). Selanjutnya adalah melakukan pemotongan citra sesuai dengan ukuran bounding box pada kendaraan tersebut. Proses pemotongan ini akan berjalan ketika bagian bawah bounding box berada diantara 2 buah garis virtual seperti pada Gambar. 8(a). Segmentasi adalah proses terakhir pada tahapan preprocessing. Hasil dari proses segmentasi berupa satu buah kendaraan seperti pada Gambar. 8(b). Setelah didapatkan citra berupa satu buah kendaraan, maka akan dilakukan proses ekstraksi ciri pada citra tersebut.
Gambar. 8. Hasil Segmentasi D. Ekstraksi Ciri
Proses ekstraksi ciri terdiri dari 2 tahap utama yaitu perhitungan LBP dan perhitungan titik koordinat Centroid
& Bounding Box. Namun sebelum melakukan ekstraksi ciri, terlebih dahulu gambar hasil segmentasi diubah
menjadi grayscale dan di-resize. Kemudian gambar dipotong menjadi n bagian sama besar seperti Gambar. 9 [10].
Gambar. 9. Pemotongan citra untuk input LBP
1) Local Binary Pattern (LBP): Metode LBP akan menerima inputan berupa gambar grayscale dengan ukuran
60x60 piksel. Masing-masing potongan gambar akan dilakukan perhitungan sebagai berikut [10]. i. Hitung histogram LBP.
ii. Hitung histogram rasio (ℎ𝑟) dan histogram maksimum (ℎ𝑚) dengan persamaan (20).
ℎ𝑟= ∑𝑘𝑖=(𝑘 2⁄ )+1ℎ(𝑖) ∑ ℎ(𝑖) 𝑘 2 ⁄ 𝑖=1 ; ℎ𝑚 = 𝑗, 𝑗 = arg {max ℎ(𝑖)} (20)
iii. Gabungkan seluruh hasil perhitungan menjadi 1 vektor seperti persamaan (21).
𝑉𝐿𝐵𝑃= [ℎ𝑟1,ℎ𝑟2, … ℎ𝑟36,ℎ𝑚1,ℎ𝑚2, … ℎ𝑚36,] (21) 2) Size Bounding Box: Size ini berguna untuk mengetahui besarnya panjang dan lebar bounding box
masing-masing kendaraan. Size tersebut kemudian digabungkan dengan vektor LBP seperti persamaan (22).
𝑉𝐿𝐵𝑃= [ℎ𝑟1,ℎ𝑟2, … ℎ𝑟36,ℎ𝑚1,ℎ𝑚2, … ℎ𝑚36,𝑥, 𝑦] (22) E. Klasifikasi Menggunalan Linear Discriminant Analysis (LDA)
Pada tahap training, LDA akan menerima inputan berupa matriks dari LBP seperti yang tertulis pada persamaan (10) dan menghasilkan data model yang disimpan dalam bentuk .mat. Pada tahap testing, LDA akan menerima masukkan berupa vektor data seperti pada persamaan (22). Kemudian vektor data tersebut dilakukan klasifikasi sesuai dengan data model yang sebelumnya telah dibuat.
IV. PENGUJIAN DAN ANALISIS
Pengujian sistem dilakukan menggunakan dataset berupa video. Sebelum melakukan pengujian, terlebih dahulu data uji diklasifikasikan dan dihitung jumlah mobil, truk, dan bus secara manual. Kemudian lakukan
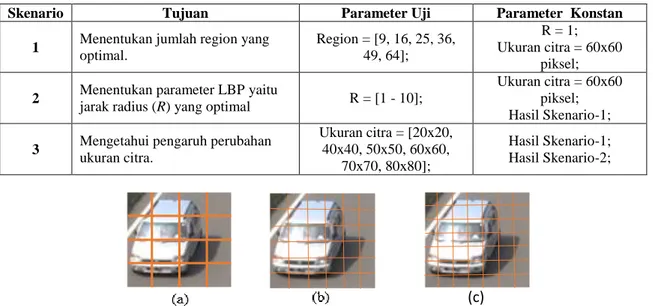
pengujian menggunakan data uji yang sama dengan menggunakan skenario pengujian pada Table II. Proses pemotongan region dapat dilihat pada Gambar 10 sampai Gambar 13.
TABLEII
SKENARIO PENGUJIAN
Skenario Tujuan Parameter Uji Parameter Konstan
1 Menentukan jumlah region yang optimal. Region = [9, 16, 25, 36, 49, 64]; R = 1; Ukuran citra = 60x60 piksel; 2 Menentukan parameter LBP yaitu
jarak radius (R) yang optimal R = [1 - 10];
Ukuran citra = 60x60 piksel; Hasil Skenario-1; 3 Mengetahui pengaruh perubahan
ukuran citra. Ukuran citra = [20x20, 40x40, 50x50, 60x60, 70x70, 80x80]; Hasil Skenario-1; Hasil Skenario-2;
Gambar. 10. Pembagian Region (a) 16 region, (b) 36 region, (c) 64 region
Gambar. 11. Pembagian 9 region. (a) Potongan utama, (b) Potongan irisan, (c) Gabungan
Gambar. 12. Pembagian 25 region. (a) Potongan utama, (b) Potongan irisan, (c) Gabungan
Gambar. 13. Pembagian 49 Region (a) Potongan utama, (b) Potongan irisan, (c) Gabungan
(c)
A. Hasil dan Analisis Pengujian
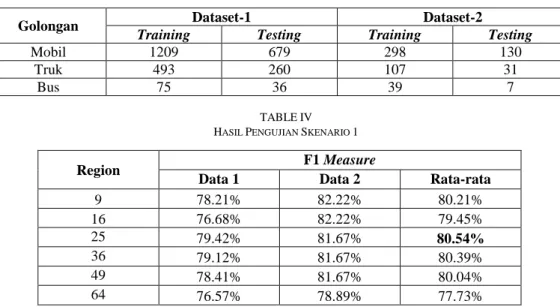
Berikut hasil dan analisis dari 3 skenario pengujian yang telah dilakukan. Seluruh pengujian dilakukan dengan menggunakan dataset yang sama. Proses pengambilan dataset telah dijelaskan pada bab sebelumnya. Rincian dataset dapat dilihat pada Tabel III.
1) Hasil dan Analisis Pengujian Skenario 1 : Skenario pengujian dilakukan untuk menentukan jumlah region
yang optimal dalam membagi citra kendaraan menjadi beberapa bagian. Pengujian ini dilakukan menggunakan nilai jarak radius (R) sebesar 1 dan ukuran citra sebesar 60x60. Hasil perhitungan performansi sistem pada pengujian skenario 1 dapat dilihat pada Tabel IV.
TABLEIII
RINCIAN DATASET
Golongan Dataset-1 Dataset-2
Training Testing Training Testing
Mobil 1209 679 298 130
Truk 493 260 107 31
Bus 75 36 39 7
TABLEIV
HASIL PENGUJIAN SKENARIO 1
Region F1 Measure
Data 1 Data 2 Rata-rata
9 78.21% 82.22% 80.21% 16 76.68% 82.22% 79.45% 25 79.42% 81.67% 80.54% 36 79.12% 81.67% 80.39% 49 78.41% 81.67% 80.04% 64 76.57% 78.89% 77.73%
Berdasarkan Tabel IV, hasil pengujian menunjukkan bahwa jumlah region yang paling optimal adalah dengan membagi gambar menjadi 25 bagian dengan performansi 80.54%. Hal ini disebabkan karena area citra yang dibandingkan lebih besar sehingga lebih banyak ciri penting yang diambil. Performansi terendah didapatkan pada pembagian menjadi 64 region. Hal tersebut dikarenakan terlalu kecilnya area citra yang dibandingkan sehingga lebih sedikit ciri penting yang diambil. Terlebih lagi proses segmentasi tidak berjalan dengan sempurna sehingga banyak aspal yang terambil pada sisi bagian luar citra.
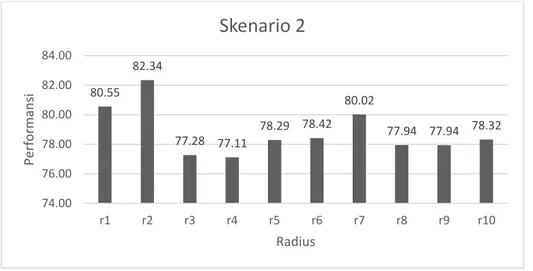
2) Hasil dan Analisis Pengujian Skenario 2 : Pengujian skenario 2 bertujuan untuk menentukan parameter
LBP, yaitu jarak radius (R) yang optimal. Pengujian ini dilakukan dengan menggunakan parameter terbaik pada pengujian skenario 1 dan ukuran citra yang sama yaitu 60x60 piksel. Pengujian yang dilakukan adalah dengan mengubah jarak radius pada LBP mulai dari radius 1 hingga radius 10. Performansi sistem pada skenario 2 dapat dilihat pada Gambar. 14.
Gambar. 14 Grafik Performansi Skenario 2
Berdasarkan Gambar. 14 dapat dianalisis bahwa performansi rata-rata terbesar dihasilkan pada radius 2. Sedangkan pada radius yang lebih besar dari radius 2 performansinya lebih kecil dan tidak stabil. Sehingga parameter yang paling optimal adalah radius 2.
3) Hasil dan Analisis Pengujian Skenario 3 : Pengujian skenario 3 dilakukan untuk melihat pengaruh
perubahan ukuran citra hasil segmentasi terhadap performansi sistem. Pengujian ini dilakukan menggunakan parameter terbaik pada pengujian skenario 1 dan 2. Hasil pengujian Skenario 3 dapat dilihat pada Tabel V.
TABLEV
HASIL PENGUJIAN SKENARIO 3
Ukuran F1 Measure
Data 1 Data 2 Rata-rata 20x20 76.06% 72.22% 74.14% 40x40 77.39% 76.66% 77.02% 50x50 77.80% 80.00% 78.90% 60x60 79.12% 85.55% 82.33% 70x70 78.72% 80.56% 79.64% 80x80 79.22% 80.55% 79.89%
Berdasarkan Tabel V, dapat dianalisis bahwa ukuran citra yang paling optimal adalah 60x60 piksel. Pada ukuran citra 20x20 performansi yang dihasilkan paling kecil dari ukuran citra lainnya. Hal ini dikarenakan semakin kecil ukuran citra, semakin banyak informasi yang dihilangkan sehingga banyak ciri penting yang ikut hilang pada saat penurunan ukuran citra. Namun performansi sistem terbesar tidak diraih oleh ukuran citra 80x80 walaupun ukuran citra tersebut paling besar dalam pengujian ini. Hal ini dikarenakan terdapat beberapa citra kendaraan hasil segmentasi yang ukurannya kurang dari 80 piksel sehingga terdapat beberapa piksel yang ditambahkan pada saat penambahan ukuran citra dan menyebabkan bertambahnya noise. Dengan bertambahnya noise pada citra ini menyebabkan turunnya performansi sistem.
V.KESIMPULAN
Berdasarkan proses implementasi, pengujian dan analisis yang dilakukan dalam penelitian tugas akhir ini, dapat ditarik kesimpulan sebagai berikut.
80.55 82.34 77.28 77.11 78.29 78.42 80.02 77.94 77.94 78.32 74.00 76.00 78.00 80.00 82.00 84.00 r1 r2 r3 r4 r5 r6 r7 r8 r9 r10 Perf o rm an si Radius
Skenario 2
1) Implementasi metode LBP sebagai algoritma ekstraksi ciri dan LDA sebagai metode klasifikasi dapat memberikan performansi 82.33% pada kondisi optimum yaitu : ukuran citra 60x60 piksel , LBP radius 2, dan pemotongan citra 25 region
2) Metode Gaussian Mixture Model cukup baik namun masih terdapat beberapa noise seperti kontainer truk, oklusi, bayangan, dan barang yang diangkut. Hal tersebut menyebabkan performansi sistem menjadi menurun.
VII.SARAN
Saran yang penulis berikan sebagai acuan dalam pengembangan tugas akhir ini, antara lain.
1) Dilakukan penelitian lebih lanjut pada tahap segmentasi agar dapat menangani oklusi dan bayangan dengan baik.
2) Pada penelitian selanjutnya, metode ekstraksi ciri LBP dibuat lebih efisien lagi agar dapat melakukan ekstraksi ciri dengan waktu yang lebih cepat sehingga sistem dapat berjalan secara real-time meskipun diimplementasikan pada hardware yang memiliki spesifikasi rendaj.
3) Pada penelitian ini, data training yang digunakan adalah data pada lokasi dan setting-an kamera yang sama persis sehingga jika ingin menempatkan sistem pada tempat lain atau jika posisi atau sudut kamera di-setting ulang maka harus dilakukan pengambilan data training ulang. Diharapkan pada pengembangan selanjutnya sistem lebih dinamis dalam menggunakan data training sehingga tidak perlu melakukan
training ulang ketika akan mengubah posisi kamera.
4) Pada penelitian selanjutnya diharapkan dapat melakukan klasifikasi pada kondisi cuaca hujan dan pada waktu malam.
ACKNOWLEDGMENT
Penulis sangat berterimakasih kepada dosen pembimbing yaitu Bapak Bedy Purnama, S.Si., M.T. dan Ibu Untari Novia Wisesty, M.T. yang telah membimbing penulis dalam menyelesaikan penelitian ini.
REFERENCES
[1] K. Yousaf, A. Iftikhar dan A. Javed, “Comparative Analysis of Automatic Vehicle Classification Techniques: A Survey,” Modern
Education and Computer Science, p. 8, 2012.
[2] Z. Guo, Z. Lei dan Z. David, “A Completed Modeling of Local Binary Pattern,” IEEE Transactions on Image Processing, p. 7, 2008. [3] R. Mejía-Iñigo, M. E. Barilla-Pérez dan H. A. Montes-Venegas, “Color-based Texture Image Segmentation for Vehicle Detection,”
IEEE, p. 19, 2009.
[4] PTIIK, “Pengenalan Pola. Klasifikasi - Linear Discriminant Analysis,” 2014.
[5] S. Rostianingsih, R. Adipranata dan W. S. Fredy, “Adaptive Background dengan Metode Gaussian Mixture,” Jurnal Informatika No.
1, vol. 9, p. 10, 2008.
[6] S. Rosmiar, A. Romadhony dan B. Purnama, “Klasifikasi Jenis Kendaraan Menggunakan Metode Gabor Wavelet dan Linear Discriminat Analysis (LDA),” Fakultas Informatika Institut Teknologi Telkom Bandung, 2013.
[7] Ghazali, S. Eko, G. Burhanuddin dan I. Niam, “Aplikasi Kematangan Tomat Berdasarkan Warna dengan Metode Linear Discriminant Analysis (LDA),” Jurnal Informatika.
[8] R. Aeri, “Ekstraksi Fitur Menggunakan Metode LDA Dan Pemilihan Eigen Value pada Cacat Kertas Duplek,” Jurnal SimanteC, p. 8, 2013.
[9] R. Habibu, “Vehicle Detection and Classification for Cluttered Urban Intersection,” International Journal of Computer Science,
Engineering and Applications (IJCSEA) Vol.3, No.1, p. 11, February 2013.
[10] Z. Chen, “Vehicle Detection, Tracking and Classification in Urban Traffic,” International IEEE Conference on Intelligence