Kecepatan, Percepatan dan Kelengkungan
Geometri dalam Ruang, Vektor
Prodi Matematika FMIPA Unsyiah
September 15, 2011
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
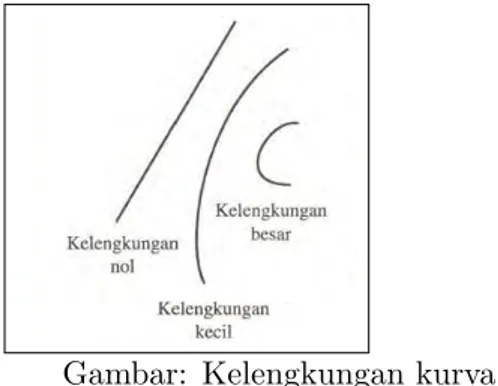
Kelengkungan(curvature) adalah suatu bilangan yang
menyatakan seberapa tajam suatu kurva melengkung. Sebuah garis mempunyai kelengkungan 0, sementara sebuah kurva yang melengkung tajam tentu mempunyai kelengkungan yang besar.
42. Sebuah bola kecil digelindingkan pada sebuah meja men-datar yang mempunyai tinggi 4 kaki dengan laju 20 kaki per detik. Pada sudut berapakah dan pada laju berapakah bola ini akan menyentuh lantai?
43. Sebuah kaleng terbuka pada salah satu ujungnya dan ditempelkan pada tepi roda berputar vertikal beIjari-jari 60 em, di mana bagian kaleng yang terbuka menghadap ke pusat roda. Di dalarn kaleng tersebut diletakkan sebuah kelereng. Berapakah Jaju sudut yang harns dijaga agar kelereng tersebut tidak jatuh? (Lihat Soal 44 untuk nilai g.)
44. Sebuah benda dengan mass a rn berputar pada orbit melingkar dengan jari-jari r pada laju konstas v mengelilingi sebuah benda yang massanya M. Dari Contoh 3,
v2
a = la(t)1 = orlr(t)1 =
-r
sementara dari Hukum Newton ten tang Kuadrat Invers, F = rna = GrnM/? atau
k
a = r2 (k adalah konstanta)
Misalkan T adalah waktu yang dibutuhkan untuk melakukan satu revolusi, R '" 3960 mil (jari-jari bumi), g '" 32,17 kaki per detik2
'" 980 em per detik2
(pereepatan gravitasi di permukaan bumi).
Gunakan fakta-fakta ini untuk menunjukkan yang berikut: (a) v2 = ~
r
(b) T2 =
(4:
2
}3
(c) k = gR2
(Hukum Ketiga Kepler ten tang orbit melingkar)
[g 45. Terapkan hasil dari Soal 44 untuk kasus burni dan sebuah satelit dengan menentukan hal-hal berikut ini:
SUBBAB 13.5 Kelengkungan dan Percepatan 195
(a) laju satelit yang mengorbit (mengelilingi) bumi 200 mil di atas permukaan bumi.
(b) jarak dari pusat burni ke sebuah satelit komunikasi yang berada
pada orbit sinkron (synchronous orbit), yaitu satelit tersebut akan senantiasa berada tepat di atas suatu titik di bumi yang sarna.
[g 46. Bulan mengorbit burni setiap 27,32 hari. Tentukan jarak dari bumi ke bulan dalam mil (lihat Soal 44).
ICASI47. Gambarlah lintasan kepala dari ret) = (4 cos t)i + (3 sin t)j,
r'(t), dan r"(t), 0 :0; t :0; nl2. Pada grafik-grafik ini, tampilkan vektor-vektor yang bersesuaian untuk
(a) t = nl6
(c) t = nl3, dan
(b) t = nl4
(d) t = nl2,
buatlah ilustrasi yang menunjukkan bahwa r'(t) akan mengarah garis singgung lintasan tersebut dan bahwa r"(t) akan mengarah sisi eekung lintasan tersebut.
ICASI48. Gambarlah lintasan kepala dari ret) = (a cos t)i + (b sin t)j,
r'(t), dan r"(t) , 0 :0; t :0; 2n, untuk beberapa nilai a dan b. Buatlah
sebuah dugaan tentang Iintasan ini dan buktikan dugaan Anda.
ICASI 49. Misalkan ret) = (3 cos t - cos 3t)i + (3 sin t - sin 3t)j. Gambarlah lintasan kepaJa dari ret), r'(t), dan r"(t) , untuk 0 :0; t :0; n. Kemudian, dengan menggunakan grafik-grafik ini, tunjukkan vektor-vektor yang bersesuaian untuk
(a) t = nl6
(c) t = nl2, dan
(b) t = nl3 (d) t = 2n13.
Jawaban Telaah Ulang Konsep: 1. fungsi bernilai-vektor dari sebuah peubah real 2. f dan g kontinu di c; f'(t)i + g'(t)j
3. posisi 4. r'(t); r"(t); garis singgung; eekung
13.5 Kelengkungan dan Percepatan
Kita akan mempelajari suatu bilangan yang disebut kelengkungan (curvature), yang mengukur seberapa tajam suatu kurva melengkung. Sebuah garis mempunyai kelengkungan 0, semen tara sebuah kurva yang melengkung tajam tentu mempunyai kelengkungan yang besar (Gambar 1). Agar sampai ke suatu definisi yang tepat, kita harus mengingat kembali beberapa gagasan terdahulu dan memperkenalkan beberapa gagasan baru.
Gambar 1
c
Kelengkungan besar Kelengkungan kecilUntuk a :,; t:'; b, misalkan ret) = f(t)i + g(t)j = (f(t), g(t» adalah vektor posisi untuk titik P = pet) pad a bidang. Kita andaikan r'(t) ada dan kontinu, dan r'(t)
*"
°
pada selang (a, b). Maka (lihat Subbab 6.4), ketika t meningkat, P akan membentuk sebuah kurva mulus (Gambar 2), dan panjang lintasan s = h(t) dari Pea) ke pet) dinyatakan dengans = h(t) =
L
~[J'(u)f
+ [g'(U)]2 du =L
Ir'(u)1 du Laju titik yang bergerak adalahds
dt = Ir'(t)1 = Iv(t)1
Karena r'(t)
*"
0, maka Iv(t)1 > 0, sehingga s akan meningkat ketika t meningkat. Berdasarkan Teorema Fungsi lovers (Teorema 7.2B), s = h(t) mempunyai invers t = h-1(s) dandt ds
1 ds/dt Iv(t)1
Misalkan T(t), yang disebut vektor singgung satuan (unit tangent vector) di pet), didefinisikan sebagai
Gambar: Kelengkungan kurva
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
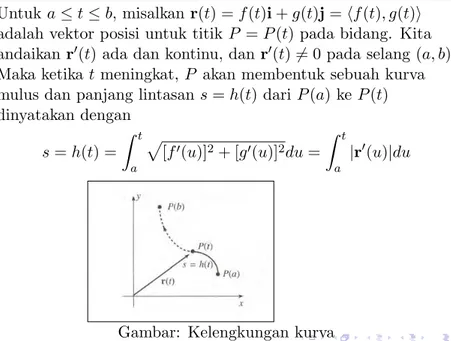
Komponen Normal dan Komponen Singgung pada Percepatan Untuka≤t≤b, misalkan r(t) =f(t)i+g(t)j=hf(t), g(t)i
adalah vektor posisi untuk titikP =P(t) pada bidang. Kita andaikanr0(t) ada dan kontinu, danr0(t)6= 0 pada selang (a, b).
Maka ketikatmeningkat,P akan membentuk sebuah kurva
mulus dan panjang lintasans=h(t) dari P(a) ke P(t) dinyatakan dengan s=h(t) = Z t a p [f0(u)]2+ [g0(u)]2du= Z t a |r0(u)|du
196 BAS 13 Geometri pada Bidang, Vektor
y ~ PCb)
"
""" Pet)S~
= n\t)~ Pea) r(t) x Gambar 2 y x Vektor singgung satuan T(t)Gambar 3 y x Gambar 4 Lingkaran
\
a\
Gambar 5 r'(t) v(t) T(t) = Ir'(t)1 = Iv(t)1Ketika pet) bergerak di sepanjang kurva, vektor satuan T(t) akan mengubah arahnya (Gambar
3). Tingkat perubahan T terhadap panjang busur s, dalam hal ini d Tlds, disebut vektor
kelengkungan (curvature vector) di P. Akhimya, kita mendefinisikan kelengkungan 1C(kappa) di P sebagai besaran dari dTlds, yaitu 1C = IdTldsl. Maka, berdasarkan Aturan Rantai,
dT dT
dt T'(t)ds dt ds Iv(t)1
Jadi,
1C =
IdTl
= IT'(t)1 = IT'(t)1ds Iv(t)1 Ir'(t)1
8eberapa Contoh Penting Untuk meyakinkan Anda bahwa definisi tentang kelengkungan di atas masuk akal, kita akan melihat beberapa ilustrasi berikut ini.
CONTOH 1 Tunjukkan bahwa kelengkungan dari sebuah garis identik dengan nol.
Penyeiesaian Hal ini segera dapat dibuktikan berdasarkan fakta bahwa T adalah sebuah
vektor konstan. Tetapi untuk mengilustrasikan metode-metode vektor, kita akan melihat sebuah
demonstrasi aljabar. Misalkan P dan Q adalah dua titik tetap pada suatu garis, dan rnisalkan
a =
oP
dan b = PQ. Maka sebuah bentuk vektor untuk persamaan garis tersebut dapat ditulissebagai (Gambar 4) Jadi, r = ret) = a + tb vet)
=
r'(t)=
b T(t) = b Ibl IT'(t)1 = ~ = 0 Iv(t)1 Ibl•
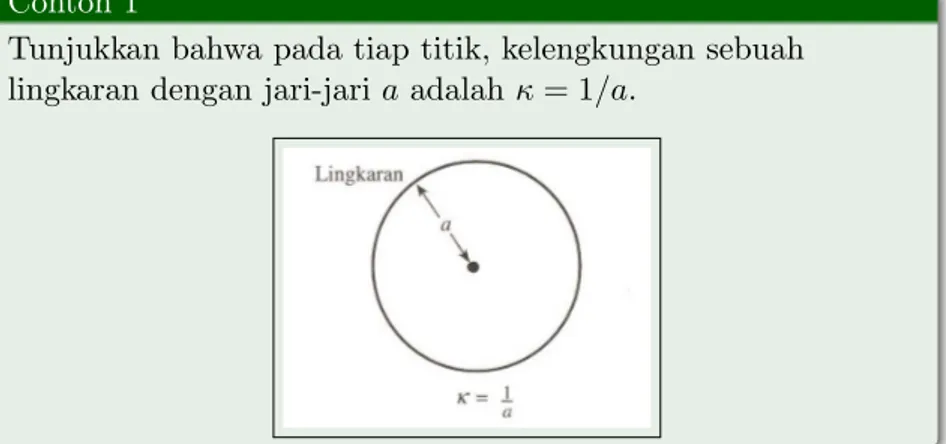
CONTOH 2 Tunjukkan bahwa pada tiap titik, kelengkungan sebuah lingkaran dengan
jari-jari a adalah 1C = 1/a (Gambar 5).
Penyeiesaian Kita dapat menganggap bahwa lingkaran tersebut berpusat di titik asal. Maka
persamaan vektomya dapat dituliskan dengan
Jadi,
ret) = a cos ti + a sin tj
vet) = r'(t) = -a sin ti + a cos tj
Iv(t)1 = [a2 sin2
t + a2 cos2
t] 112 = a
v(t) vet)
T(t) = Iv(t)1 = ----;; = -sin ti + cos tj
1C= IT'(t)1 = I-cos ti - sin tjl = .!.
Iv(t)1 a a
Karena 1C adalah kebalikan dari jari-jari, maka semakin besar suatu lingkaran, semakin kecil
kelengkungannya. •
Contoh tentang lingkaran ini membawa kita ke beberapa gagasan baru. Andaikan P adalah
sebuah titik pada sebuah kurva di mana 1C *-O. Perhatikan lingkaran berikut di mana garis Gambar: Kelengkungan kurva
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Laju titik yang bergerak adalah
ds
dt =|r
0(t)|=|v(t)|
Karenar0(t)6= 0, maka |v(t)|>0, sehingga sakan meningkat
ketikat meningkat.
Selanjutnya,s=h(t) mempunyai invers t=h−1(s) dan
dt ds = 1 ds/dt = 1 |v(t)|
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
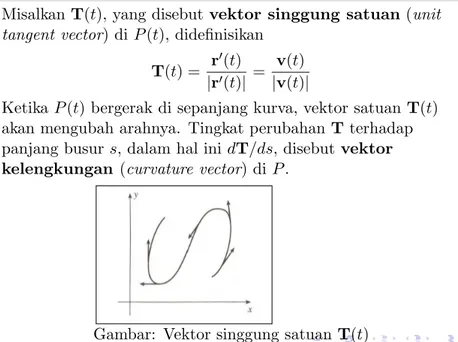
MisalkanT(t), yang disebut vektor singgung satuan (unit
tangent vector) diP(t), didefinisikan T(t) = r
0(t)
|r0(t)| =
v(t) |v(t)|
KetikaP(t) bergerak di sepanjang kurva, vektor satuanT(t)
akan mengubah arahnya. Tingkat perubahanTterhadap
panjang busurs, dalam hal inidT/ds, disebutvektor
kelengkungan(curvature vector) di P.
196 BAS 13 Geometri pada Bidang, Vektor
y ~ PCb)
"
""" Pet)S~
= n\t)~ Pea) r(t) x Gambar 2 y x Vektor singgung satuan T(t)Gambar 3 y x Gambar 4 Lingkaran
\
a\
Gambar 5 r'(t) v(t) T(t) = Ir'(t)1 = Iv(t)1Ketika pet) bergerak di sepanjang kurva, vektor satuan T(t) akan mengubah arahnya (Gambar
3). Tingkat perubahan T terhadap panjang busur s, dalam hal ini d Tlds, disebut vektor
kelengkungan (curvature vector) di P. Akhimya, kita mendefinisikan kelengkungan 1C(kappa) di P sebagai besaran dari dTlds, yaitu 1C = IdTldsl. Maka, berdasarkan Aturan Rantai,
dT dT
dt T'(t)ds dt ds Iv(t)1
Jadi,
1C =
IdTl
= IT'(t)1 = IT'(t)1ds Iv(t)1 Ir'(t)1
8eberapa Contoh Penting Untuk meyakinkan Anda bahwa definisi tentang kelengkungan di atas masuk akal, kita akan melihat beberapa ilustrasi berikut ini.
CONTOH 1 Tunjukkan bahwa kelengkungan dari sebuah garis identik dengan nol.
Penyeiesaian Hal ini segera dapat dibuktikan berdasarkan fakta bahwa T adalah sebuah
vektor konstan. Tetapi untuk mengilustrasikan metode-metode vektor, kita akan melihat sebuah
demonstrasi aljabar. Misalkan P dan Q adalah dua titik tetap pada suatu garis, dan rnisalkan
a =
oP
dan b = PQ. Maka sebuah bentuk vektor untuk persamaan garis tersebut dapat ditulissebagai (Gambar 4) Jadi, r = ret) = a + tb vet)
=
r'(t)=
b T(t) = b Ibl IT'(t)1 = ~ = 0 Iv(t)1 Ibl•
CONTOH 2 Tunjukkan bahwa pada tiap titik, kelengkungan sebuah lingkaran dengan
jari-jari a adalah 1C = 1/a (Gambar 5).
Penyeiesaian Kita dapat menganggap bahwa lingkaran tersebut berpusat di titik asal. Maka
persamaan vektomya dapat dituliskan dengan
Jadi,
ret) = a cos ti + a sin tj
vet) = r'(t) = -a sin ti + a cos tj
Iv(t)1 = [a2 sin2
t + a2 cos2
t] 112 = a
v(t) vet)
T(t) = Iv(t)1 = ----;; = -sin ti + cos tj
1C= IT'(t)1 = I-cos ti - sin tjl = .!.
Iv(t)1 a a
Karena 1C adalah kebalikan dari jari-jari, maka semakin besar suatu lingkaran, semakin kecil
kelengkungannya. •
Contoh tentang lingkaran ini membawa kita ke beberapa gagasan baru. Andaikan P adalah
sebuah titik pada sebuah kurva di mana 1C *-O. Perhatikan lingkaran berikut di mana garis
Gambar: Vektor singgung satuanT(t)
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Kelengkunganκ (kappa) di P didefinisikan sebagai besaran
daridT/ds, yaitu κ=|dT/ds|. Maka, berdasarkan Aturan Rantai, dT ds = dT dt dt ds = T0(t) |v(t)| Jadi κ= dT ds = |T 0(t)| |v(t)| = |T0(t)| |r0(t)|
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Contoh 1
Tunjukkan bahwa pada tiap titik, kelengkungan sebuah lingkaran dengan jari-jaria adalahκ= 1/a.
196 BAS 13 Geometri pada Bidang, Vektor
y ~ PCb)
"
""" Pet)S~
= n\t)~ Pea) r(t) x Gambar 2 y x Vektor singgung satuan T(t)Gambar 3 y x Gambar 4 Lingkaran
\
a\
Gambar 5 r'(t) v(t) T(t) = Ir'(t)1 = Iv(t)1Ketika pet) bergerak di sepanjang kurva, vektor satuan T(t) akan mengubah arahnya (Gambar
3). Tingkat perubahan T terhadap panjang busur s, dalam hal ini d Tlds, disebut vektor
kelengkungan (curvature vector) di P. Akhimya, kita mendefinisikan kelengkungan 1C(kappa) di P sebagai besaran dari dTlds, yaitu 1C = IdTldsl. Maka, berdasarkan Aturan Rantai,
dT dT
dt T'(t)ds dt ds Iv(t)1
Jadi,
1C =
IdTl
= IT'(t)1 = IT'(t)1 ds Iv(t)1 Ir'(t)18eberapa Contoh Penting Untuk meyakinkan Anda bahwa definisi tentang kelengkungan
di atas masuk akal, kita akan melihat beberapa ilustrasi berikut ini.
CONTOH 1 Tunjukkan bahwa kelengkungan dari sebuah garis identik dengan nol.
Penyeiesaian Hal ini segera dapat dibuktikan berdasarkan fakta bahwa T adalah sebuah
vektor konstan. Tetapi untuk mengilustrasikan metode-metode vektor, kita akan melihat sebuah
demonstrasi aljabar. Misalkan P dan Q adalah dua titik tetap pada suatu garis, dan rnisalkan a =
oP
dan b =PQ.
Maka sebuah bentuk vektor untuk persamaan garis tersebut dapat ditulissebagai (Gambar 4) Jadi, r
=
ret)=
a + tb vet)=
r'(t)=
b T(t)=
b Ibl IT'(t)1 = ~ = 0 Iv(t)1 Ibl•
CONTOH 2 Tunjukkan bahwa pada tiap titik, kelengkungan sebuah lingkaran dengan
jari-jari a adalah 1C = 1/a (Gambar 5).
Penyeiesaian Kita dapat menganggap bahwa lingkaran tersebut berpusat di titik asal. Maka
persamaan vektomya dapat dituliskan dengan
Jadi,
ret) = a cos ti + a sin tj
vet) = r'(t) = -a sin ti + a cos tj
Iv(t)1 = [a2 sin2 t + a2 cos2 t] 112 = a v(t) vet)
T(t) = Iv(t)1 = ----;; = -sin ti + cos tj
1C= IT'(t)1 = I-cos ti - sin tjl =
.!.
Iv(t)1 a a
Karena 1C adalah kebalikan dari jari-jari, maka semakin besar suatu lingkaran, semakin kecil
kelengkungannya. •
Contoh tentang lingkaran ini membawa kita ke beberapa gagasan baru. Andaikan P adalah
sebuah titik pada sebuah kurva di mana 1C *-O. Perhatikan lingkaran berikut di mana garis
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan Penyelesaian.
Kita dapat menganggap bahwa lingkaran tersebut berpusat di titik asal. Maka persamaan vektorya dapat dituliskan dengan
r(t) =acosti+asintj Jadi v(t) = r0(t) =−asinti+acostj |v(t)| = [a2sin2t+a2cos2t]1/2=a T(t) = v(t) |v(t)| = v(t) a =−sinti+ costj κ = |T 0(t)| |v(t)| = | −costi−sintj| a = 1 a
Karenaκ adalah kebalikan dari jari-jari, maka semakin besar
suatu lingkaran, semakin kecil kelengkungannya.
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan Kelengkungan pada lingkaran ini memberikan kita ke beberapa
gagasan baru kelengkungan pada kurva. Perhatikan lingkaran berikut dimana garis singgung terhadap suatu kurva berada di
titikP dan mempunyai kelengkungan yang sarna di titik
tersebut. Pusat lingkaran tersebut akan terletak di sisi cekung
kurva tersebut. Lingkaran ini disebutlingkaran
kelengkungan(circle of curvature) ataulingkaran oskulasi
(osculating circle), jari-jarinyaR= 1/κdisebutjari-jari
kelengkungan(radius of curvature), dan pusatnya disebut
pusat kelengkungan(center of curvature).
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Lingkaran kelengkungan
Kurva
Gambar 6
SUBBAB 13.5 Kelengkungan dan Percepatan 197
singgung terhadap suatu kurva berada di titik P dan mempunyai kelengkungan yang sarna di
titik tersebut. Pusat lingkaran tersebut akan terletak di sisi cekung kurva tersebut. Lingkaran ini disebut Iingkaran kelengkungan (circle of curvature) atau Iingkaran oskulasi (osculating circle), jari-jarinya R = 11K" disebut jari-jari kelengkungan (radius of curvature), dan pusatnya disebut pusat kelengkungan (center of curvature). Gagasan ini diilustrasikan pada Gambar 6.
CONTOH 3 Tentukan kelengkungan dan jari-jari kelengkungan untuk hiposikloid r = 8 cos3 t i + 8 sin3 t j
di titik-titik P dan Q, di mana masing-masing t = n!12 dan t = 3n14. Kemudian sketsalah grafik hiposikloid ini yang menunjukkan lingkaran kelengkungan di titik P dan Q.
Peny.eiesaian Untuk 0 < t < n, t f:. rcI2,
vet) = r'(t) = -24 cos2 t sin t i + 24 sin2 t cos t j
Iv(t)1 = 241sin t cos tl
. 2 . 2
T( t = -) sm t cos t. 1+ sm t cos t . J
Isin t cos tl Isin t cos tl
{ -eo, ti Hin ~ j 0< t <-n = n 2 cos tl - sm tJ - < t < n 2 {,in Ii + eos Ij o < t < -n T'(t) = n 2 -sin ti - cos tj - < t < n 2 K(t) = IT'(t)1 = 1
Iv(t)1 241sin t cos tl 121sin 2tl Jadi, di P kita mempunyai
K"C~)
= -12-sin-(;-2-'-~""7)
dan di Q kita mempunyai1
6 dan
dan
RC:)
= 12Grafik hiposikloid dan lingkaran-lingkaran kelengkungan tersebut ditunjukkan pada Gambar 7.
Lingkaran kelengkungan di Q Gambar 7 Lingkaran kelengkungan di P P 8 10 x
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Contoh 2
Tentukan kelengkungan dan jari-jari kelengkungan untuk hiposikloid
r(t) = 8 cos3ti+ 8 sin3tj
di titik-titikP danQ, di mana masing-masing t=π/12 dan
t= 3π/4.
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan Penyelesaian.
Untuk 0< t < π,t6=π/2,
v(t) = r0(t) =−24 cos2tsinti+ 24 sin2tcostj
|v(t)| = 24|sintcost| T(t) = −sintcos 2t |sintcost|i+ sin2tcost |sintcost|j = −costi+ sintj, 0< t < π/2; costi−sintj, π/2< t < π . T0(t) = sinti+ costj, 0< t < π/2; −sinti−costj, π/2< t < π . κ(t) = |T 0(t)| |v(t)| = 1 24|sintcost| = 1 12|sin 2t| [email protected] Geometri dalam Ruang, Vektor
Kecepatan, Percepatan dan Kelengkungan
Pengertian
Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan Penyelesaian.
Jadi, diP kita mempunyai
κ(π/12) = 1 12|sin 2· π 12| = 1 6 dan R π 12 = 6
dan diQ kita mempunyai
κ(3π/4) = 1 12|sin 2·3π4 | = 1 12 dan R 3π 4 = 12 [email protected] Geometri dalam Ruang, Vektor
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Misalkanφmelambangkan sudut yang diukur berlawanan arah
jarum jam dariike T. Maka, T = cosφi+ sinφj, sehingga
dT
dφ =−sinφi+ cosφj
dT
dφ adalah sebuah vektor satuan (panjang 1) danT.
dT dφ = 0. Di samping itu, κ= dT ds = dT dφ dφ ds = dT dφ dφ ds akibatnya κ= dφ ds
Rumus untukκ ini membantu pemahaman intuitif kita
mengenai kelengkungan, yaitu mengukur tingkat perubahanφ
terhadaps.
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Teorema
Tinjau sebuah kurva dengan persamaan vektor
r(t) =f(t)i+g(t)j, yakni, dengan menggunakan persamaan parametrikx=f(t) dan y=g(t), maka
κ= |x
0y00−x00y0| [(x0)2+ (y0)2]3/2]
Secara khusus jika kurva tersebut mempunyai grafiky=g(x)
maka
κ= |y
00| [1 + (y0)2]3/2]
Bagian,utama menunjukan pendiferensialan terhadapt pada
rumus pertama, dan terhadapx pada rumus kedua.
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Contoh 3
Tentukan kelengkungan elips
x= 3 cost, y = 2 sint
pada titik yang berhubungan dengant= 0 dan t=π/2, yaitu
di (3,0) dan (0,2). Sketsalah elips tersebut yang menunjukkan lingkaran kelengkungan yang bersesuaian.
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan Penyelesaian.
Dari persamaan-persamaan berikut,
x0=−3 sint, y0 = 2 cost x00=−3 cost, y00=−2 sint Jadi κ=κ(t) = |x 0y00−x00y0| [(x0)2+ (y0)2]3/2] = 6 sin2t+ 6 cos2t [9 sin2t+ 4 cos2t]3/2 = 6 [5 sin2t+ 4]3/2 Akibatnya κ(0) = 6 43/2 = 3 4 κ(π/2) = 6 93/2 = 2 9 [email protected] Geometri dalam Ruang, Vektor
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
MisalkanP=P(t) adalah sebuah titik pada sebuah kurva
mulus. Definisikan sebuah vektor baruN=N(t), disebut
vektor normal satuan(unit normal vector) di titikP, dengan
N= dT/ds |dT/ds| = 1 κ dT ds maka dT ds =κN
SekarangT= cosφi+ sinφj, maka
dT ds = dT dφ dφ ds = (−sinφi+ cosφj) dφ ds
di manaT·N= 0. Jadi, Nadalah sebuah vektor satuan yang
tegak lurus terhadapTdan mengarah ke sisi cekung kurva.
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Vektor kecepatanvmemenuhi
v=|v|T= ds dtT maka a = dv dt = d2s dt2T+ ds dt dT dt = d 2s dt2T+ ds dt dT ds ds dt Jadi a= d 2s dt2T+ ds dt 2 κN
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Contoh 4
Sebuah partikel bergerak sedemikian rupa sehingga vektor posisinya adalahr(t) =t2i+31t3j, t≥0. Nyatakan a(t) dalam
bentukTdan Ndan hitunglah ketikat= 2.
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Penyelesaian. v(t) = 2ti+t2j ds dt = |v(t)|= p 4t2+t4 =tp4 +t2 d2s dt2 = 4 + 2t2 √ 4 +t2 κ ds dt 2 = |x 0y00−x00y0| [(x0)2+ (y0)2]3/2 ds dt 2 = |x 0y00−x00y0| ds/dt = |(2t)(2t)−(t 2)(2)| t√4 +t2 = 2t2 t√4 +t2 = 2t √ 4 +t2
Kecepatan, Percepatan dan Kelengkungan
Pengertian Contoh
Rumus-rumus Lain untuk Kelengkungan
Komponen Normal dan Komponen Singgung pada Percepatan
Penyelesaian. Jadi a(t) = d 2s dt2T+ ds dt 2 κN = 4 + 2t 2 √ 4 +t2T+ 2t √ 4 +t2N dan a(2) = √12 8T+ 4 √ 8N= 3 √ 2T+√2N