Aplikasi Segmentasi Citra Medis Berbasis Morfologi Kontur Aktif
Korsa S. Putra1, Yudhi Purwananto2, Rully Soelaiman3Teknik Informatika, Fakultas Teknologi Informasi, ITS email : [email protected]
ABSTRAKSI
Saat ini banyak dilakukan penelitian pada objek citra medis (medical image) yang dilakukan sebagai bantuan awal dalam penganalisaan terhadap citra medis. Penelitian dilakukan untuk mengetahui secara dini kelainan yang diderita oleh pasien. Salah satu penelitian yang dilakukan untuk mengetahui bentuk suatu objek yang berada pada citra medis dengan cara melakukan segmentasi.
Guna memperoleh hasil segmentasi citra yang optimal, maka banyak metode yang dapat digunakan. Salah satu metodenya adalah Minimum Variance yang digunakan oleh Chan dan Vese.
Dalam Tugas Akhir ini akan dibuat aplikasi dari metode pengolahan citra medis yang merumuskan kembali metode milik Chan dan Vese dengan menggunakan tools mathematical morphology, pada
binary multi-scale morphological. Dengan menggunakan
metode tersebut maka proses akan lebih efektif dan efisien dalam perhitungannya.
Uji coba dilakukan pada citra gray scale. Hasil segmentasi yang diperoleh dengan metode yang diusulkan sudah berhasil mensegmentasi objek yang diinginkan pada citra.
Kata kunci : Aktif kontur, morfologi, Chan-Vese model, Segmentasi Citra, Median Filter, Threshold
1
PENDAHULUAN
Segmentasi gambar menggunakan model kontur aktif (snake) melibatkan penyusunan dari sebuah curve / garis permukaan citra. Objek yang dibatasi berasal dari objek gambar yang diberikan. Perhitungan acvtive contour
model berdasarkan dari level set framework, yang
memungkinkan model kontur aktif menghitung topologi yang rumit dari bentuk utama suatu citra[1].
C(s) : [0,1] R2, merupakan parameter kurva 2D. Dimana C(s) merupakan level set framework, C merepresentasikan fungsi ϕ Lipschitz seperti C={(x,y) |
ϕ(x,y) = 0}. Penyusunan kurva yang diberikan oleh zero
level-set pada saat t untuk ϕ(x,y,t). Untuk menyusun kurva C dalam arah normal dengan kecepatan F dapat dihitung
= F|| || (1)
dengan kondisi awal ϕ(x,y,0) = ϕ0(x,y) dan ϕ ditentukan sebagai subset R3.
Pada proses segmentasi citra, persamaan untuk menentukan fungsi kecepatan F telah ditentukan. F merupakan sebuah fungsi dari gradient citra, sehingga
perhentian evolusi dari kontur aktif pada edge yang penting dapat ditemukan.
Salah satu pendekatan segmentasi menggunakan metode berdasarkan daerah (region-based). Solusi yang efektif untuk menghitung gradient kontur aktif menggunakan persamaan Chan and Vese (C-V) model, “active contours without edges”. Energi yang diperlukan dalam fungsi C-V model menggunakan
minimum-variance criterion. Teknik yang digunakan pada C-V
model adalah curve evolution, Mumford-shah function for
segmentation dan level set. Inisial kontur bisa dilakukan
dimana saja pada citra dan C-V model akan secara otomatis mendeteksi keseluruhan kontur, tidak peduli letak dari inisial kontur.
Energy yang diperlukan untuk menghitung
minimum-variance criterion sangat besar karena iterasi pada curve evolution tinggi. Untuk memperbaiki metode yang sudah
ada, maka diusulkan sebuah metode baru yang merumuskan kembali C-V model dengan framework of
mathematical morphology, menggunakan binary multi-scale morphological. Model ini menghasilkan algoritma
yang efektif dan lebih efisien pada curve evolution level
set.
2
ACTIVE CONTOURS WITHOUT
EDGES
Tony F. Chan mengusulkan suatu metode yaitu
Chan-Vese (C-V) model, yang merupakan Region based model.
Model ini merupakan perbaikan dari edge based model, karena mendasarkan pendeteksian tepi pada suatu citra tidak berdasar pada gradient citra tapi didasarkan pada teknik curve evolution, Mumford-shah function for
segmentation dan level set. Hal ini dikarenakan,
pendeteksian menggunakan gradient citra kurang efektif karena diskrit gradient terbatas dan fungsi pemberhentian g tidak pernah null pada suatu tepi dan memungkinkan kurva melewati batas yang ada. Pada C-V model, inisial kontur bisa dilakukan dimana saja pada citra dan C-V model akan secara otomatis mendeteksi keseluruhan kontur, tidak peduli letak dari inisial kontur[1].
Region Based memiliki beberapa kelebihan
dibandingkan dengan edge based model, yaitu:
1. Region Based menggunakan informasi dari bagian dalam maupun luar konur untuk mengkontrol evolusi, yang mana sedikit sensitive terhadap noise dan memiliki performance yang baik pada image dengan
2. Region Based sedikit sensitive pada lokasi dari inisial kontour dan kemudian dapat secara efisien mendeteksi exterior dan interior boundaries.
Citra I pada domain
, C-V model, diformulasikan dengan melakukan minimalisasi fungsi energi berikut :
I x c dx
I x c dxx E C inside C outside CV ) ( ) ( 2 2 2 2 1 1 | ( ) | | ( ) | , (2)Dimana, c1 dan c2 merupakan 2 konstanta konstanta yang merupakan rata2 intensitas pada inside dan outside kontour. Dengan menggunakan Level set method diasumisikan:
0
)
(
:
)
(
,
0
)
(
:
)
(
,
0
)
(
:
x
x
C
outside
x
x
C
inside
x
x
C
(3)Dengan melakukan minimalisasi pada persamaan 3, penyelesaian untuk c1 dan c2 yaitu :
dx
H
dx
H
x
I
c
)
(
)
(
).
(
)
(
1
(4)
dx
H
dx
H
x
I
c
))
(
1
(
))
(
1
).(
(
)
(
2
(5)Dengan menambahkan panjang dan energy pada persamaan 3, kemudian meminimalkannya, akan dihasilakan persamaan Level set, yaitu:
2 2 2 2 1 1( ) ( ) | | ) ( v I c I c t
(6) Keterangan:
0, v
0
,
1
0,
2
0 : parameter tetap Dimana:μ = mengkontrol smoothnes dari zero level set v = meningkatkan kecepatan
1,
2 = mengkontrol tenaga pada image data, pada inside dan outside contour.
= operasi gradient H(
) = Heaviside function δ(
) = dirac functionheaviside function digunakan untuk menyelesaikan c1 dan c2. Heaviside function disebut juga unit step function, yang
merupakan fungsi diskontinyu dan memiliki nilai 0 untuk argument negative, dan bernilai 1 untuk argument positif.
,
0
,1
,
0
,
0
]
[
n
n
n
H
3
DESKRIPSI MODEL
3.1 Minimum Variance Model
Open subset dari R2 adalah Ω, dengan Ω sebagai batasannya. I : Ω R menjadi sebuah gambar yang diberikan dan asumsikan bahwa kurva C yang disusun adalah batasan dari open subset dari Ω , misalnya dan C = . Dengan menggunakan penyederhanaan calculus, minimalisasi fungsi
E1 (C) = (8)
Tiap titik dari C harus berpindah di bawah pengaruh energy F1 = - fNc , dimana Nc adalah sisi luar normal dari C. Di dalam (C) ditandai dengan region dan diluar (C) ditandai dengan c = . Makadapat disedehanakan : E2 (C) = 0 (x,y) dxdy
+ b (x,y)dxdy (9)
Untuk menyusun kurva C dibawah pengaruh F2 = (fb – f0)Nc. Active contour model dari chan & vese meminimalisasi fungsi E (c1,c2,C) diperoleh dari E2 dengan mengatur f0 = |I(x,y) – c2|2 , dan fb = |I(x,y) – c2|2 , dengan c1 dan c2 adalah beberapa konstanta yang bergantung pada C, dan beberapa rumus penormalan tambahan, misalnya :
E (c1,c2,C) =
2dxd
2dxdy (10)
Dengan , v 0, 0 adalah parameter yang sudah ditentukan. Sehigga hasil fungsi mendorong C ke dalam saat fb – f0 < 0 dan keluar jika fb – f0 > 0. Dengan kata lain, kurva C menyusut jika varians didalam lebih besar daripada yang di c dan begitu sebaliknya.
Menggunakan formalism level set, metode penurunan paling signifikan dipastikan ke dalam bentuk :
Yang dapat diselesaikan untuk , dengan k adalah level set lengkungan / curva dan c1 = rata-rata (I) dalam { } dan c2 = rata-rata (I) dalam { }. Di Persamaan 2.19 ini, syarat pertama (first term) merepresentasikan aliran lengkungan dan minimalisasi panjang dari kurva, syarat kedua (second term) merepresentasikan gerakan ke dalam pada kecepatan konstan dan minimalisasi area dari region , dan syarat terakir (last term) merepresentasikan kompetisi region dengan minimum variance criterion.
3.2 Minimum Variance Model dan Diskrit
Multi scale Set Morphology
Mengintrepretasikan setiap syarat – syarat dari model
minimum variance milik chan & vese dalam konteks multi-scale morphology [2,3,4]. k adalah bentuk diskrit
dari continuous scale parameter t.
3.2.1 Gerakan dalam kecepatan konstan
Kecapatan F dalam persamaan (1) menjadi Fc = - v dengan v 0. Menggunakan finite-element discretization pada suatu waktu, perumusan diperbaharui menjadi :
k+1 =
k - (12)Karena
harus setiap waktu menjadi sebuah perkiraan, misalnya || || = 1, pembaharuan rumus diatas yang artinya graph dan
ditranslasi pada tiap iterasi oleh ( ) sepanjang z aksis negative. Dengan demikian rumus Sk = inside(Ck) = {(x,y) :
k 0}. Setelah menggunakan rumus yang terbaru akan menjadi Sk+1 = Sk,
⊖ menandakan irisan himpunan dan B merupakan komponen bola yang diinduksi oleh Euclideannorm || ||.
Secara umum Bp = {(x,y) : ||(x,y)||p } menandakan komponen bola yang berkorespondensi dengan beberapa lp norm || ||p [5]. Dimana
||(x,y)||p =
(
ux
)
2
(
uy
)
2 (13)3.2.2 Kompetisi Region
Kecepatan F di Persamaan (1) sekarang Fr = λ [(I-c2)2 -(I-c1)2], dengan λ > 0.Mengikuti alasan yang sama seperti disubsection sebelumnya, iterasi menjadi
Sk+1 = (Sk ⊕ Bp)
(Sk ⊖ Bp) (14)Dimana inisial kondisi S0 = inside (C0) = {(x,y) : }. Hasil dari himpunan Sk+1 mengandung titik-titik (x,y) yang juga merupakan solusi dari delasi dari Sk jika Fr > 0 atau sebaliknya erosi Sk.
3.2.3 Aliran Kelengkungan
Aliran pemendekan Euclidean (aliran lengkungan) berlaku ketetapan Fk = dalam persamaan 1, dimana k berarti rata-rata lengkungan.
Perkiraan dari iterasi aliran lengkungan (kurva) dapat diterapkan
Sk+1 = MED (Sk) (14)
Dimana MED ( ) menunjukkan median, „ ₒ ‟ menunjukkan operasi opening , dan „ • „ merupakan operasi closing.
3.2.4 Metodologi
Sebuah pendekatan nyata untuk merumuskan PDE dalam persamaan 11, menggunakan multiscale
morphology akan dimulai dari inisialisasi S0 = {(x,y) : } dan berjalan terus sampai menemukan solusi Sk. Asumsikan bahwa Sk sudah diselesaikan pada perhitungan diskrit k-times dan untuk menghitung Sk+1, dapat menyelesaikan persamaan 11 pada iterasi berikutnya dalam 3 langkah : mulai dari solusi W0 = Sk dari waktu langkah sebelumnya dan secara sequensial tiap persyaratan di sisi kanan pada persamaan 11 menggunakan fungsi F yang tepat [6], seperti :
Fr Fc Fk
(15) Solusi pada(k+1) diberikan oleh himpunan terakhir , Sk+1 = W3.
Secara umum, metode segmentasi citra dengan metode
multiscale morphology secara sequential dapat dilihat
pada Gambar 1. Proses terterdiri dari 3 tahapan inti, tahap pertama yaitu pembagian kompetisi region, tahap kedua adalah perubahan kurva dengan kecepatan konstan Fc dan tahap ketiga adalah penghalusan pada aliran kelengkungan dari kurva dengan Fk.
Hasil segmentasi yang optimal dapat diperoleh melalui beberapa iterasi samapai menemukan hasil yang paling optimal. Pemberhentian iterasi bergantung pada nilai norm dari kurva, jika nilai norm tidak berubah maka iterasi berhenti.
Proses thresholding dilakukan pada model ini dengan tujuan menghilangkan bagian-bagian dari hasil segmentasi dengan luasan tertentu. Luasan tertentu ini dianggap bukan dari bagian hasil segmentasi.
Mulai Melakukan inisialisasi terhadap fungsi level set(ϕ) Menghitung rata-rata intensitas inside(c1(ϕ) ) dan outside kontur (c2(ϕ)) Menghitung Unit Ball (Bp) Menghitunh Region Competition (Fr) Menetapkan evolusi level set
dengan, kecapatan konstan (Fc) Menghitung kelengkungan level set (Fk) Menetapkan opening closing secara lokal oleh
masking B Apakah norm (u) sebelum > norm (u) setelah itersi sama? Ya Selesai Tidak Melakukan threshold pada level set dengan
luasan tertentu input citra gray scale volumetric Citra hasil segmentasi
Gambar 1 Diagram alir proses segmentasi citra medis dengan metode multiscale morphology model
sequential
3.3 MODEL DISKRIT
Efisiensi ditentukan pendekatan model variansi-minimum sebagai berikut. Sama dengan metode level-set, jadikan u : Ω R menjadi fungsi biner [6],
(16)
Dengan karakteristik fungsi . Asumsikan bahwa C melekat sebagai level set nol dari u, misalnya,
. Jika C merusak bentuk, kurva diberikan dengan level set nol pada k waktu pada fungsi uk (diskrit). Catat bahwa meskipun nol bukanlah
sebuah nilai umum dari u, dapat selalu menggunakan interpolasi linear untuk merekonstruksi C dengan resolusi grid yang diberikan seperti dan menunjukkan bagian dari Ω [6]. Rumus diskrit terbaru untuk u yaitu :
(17)
Dengan sgn(x) = 1 jika x>0, -1 jika sebaliknya, jumlah elemen dari , dan „*‟ menunjukkan konvolusi linear. Fungsi kecepatan [6] diberikan sebagai berikut :
(18)
Dimana . Berdasarkan
persamaan (17), definisi yang diberikan oleh persamaan (16), dan dengan kualitas relasi pembesaran dan penyusutan himpunan, dapat disusun C dengan cara
men-threshold hasil keluaran dari konvolusi linear dan fungsi
karakteristik dari region dalamnya dan begitu juga dengan . Jadi, kurva C meluas atau menyusut secara local sebagai tanda dari perubahan . Fungsi kecepatan (tidak terbatas pada nilai biner) merepresentasikan kompetisi dari dua metode, region homogeneity (minimum variance) dan penghalusan/ regularisasi. Meskipun rumus terbaru menghasilkan u biner, fungsi menentukan pelebaran maupun penyusutan C secara local. Terlebih lagi, jika menggantikan sgn(-) dengan sebuah fungsi sigmoidal pada persamaan (17) dan (18), u menjadi lebih halus seolah u tidak terbatas pada nilai-nilai biner lagi.
Secara umum, metode segmentasi citra dengan metode
multiscale morphology secara sequential dapat dilihat
pada Gambar 2. Melakukan inisialisasi terhadap fungsi level set(ϕ) Menghitung rata-rata intensitas inside(c1(ϕ) ) dan outside kontur (c2(ϕ)) Menghitung Unit Ball (Bp) Menghitung Characteristic dari
Bp pada level set
Menghitung fungsi dari kecepatan Fk
Menetapkan evolusi dari level
set yang baru Apakah norm (u) sebelum > norm (u) setelah itersi
sama? Ya
Tidak Melakukan threshold pada level set dengan
luasan tertentu Mulai Selesai Citra hasil segmentasi input citra gray scale volumetric
Gambar 2 Diagram alir proses segmentasi citra medis dengan metode multiscale morphology model diskrit
4
UJI COBA DAN EVALUASI
4.1 Setting Parameter pada 2 model, jumlah
itersai dan luasan threshold
Sequential model
Model sequential terdapat parameter yang dapat disetting yaitu nilai elastisitas region competition (λ), nilai kecepatan konstan (v) dan nilai dari aliran kelengkungan (μ). Uji coba kali ini nilai dari λ=1, v = 0 , μ = 0.3 , jumlah itersi = 1 dan luasan untuk threshold = 20. Hasil dari segmentasi dipaparkan pada tabel A.2 yang terdiri dari hasil output segmentasi. Kemudian, perhitungan jumlah iterasi dan waktu yang diperlukan untuk melakukan segmentasi dapat dilihat pada tabel 1.
Tabel 1 Perhitungan jumlah iterasi dan waktu untuk segmentasi model sequential
Citra Sub
Image Iterasi Waktu (s)
brain.bmp 1 1 1.9968 jaringan.bmp 1 1 41.1999 mamograph.bmp 1 1 7.7844 mri-stack.tif 27 1 x 27 1230.021 t1-rendering.tif 36 1 x 36 1837.519
Diskrit model
Parameter model diskrit yang dapat disetting adalah nilai elastisitas region competition region competition (λ), nilai alpha () dan beta (β). Uji coba kali ini nilai dari λ=1, β = 0 , = 0.2 , jumlah itersi = 1 dan luasan untuk threshold = 20. Hasil dari segmentasi dipaparkan pada tabel A.2 yang terdiri dari hasil segmentasi. Kemudian, perhitungan jumlah iterasi dan waktu yang diperlukan untuk melakukan segmentasi yang optimal dapat dilihat pada tabel 2.
Tabel 2 Perhitungan jumlah iterasi dan waktu untuk segmentasi model diskrit
Citra Sub Image Iterasi Waktu (s)
brain.bmp 1 1 0.0468
jaringan.bmp 1 1 0.4056
mamograph.bmp 1 1 0.2184
mri-stack.tif 27 1 x 27 12.324 t1-rendering.tif 36 1 x 36 7.7688
Perbandingan antara Sequential Model dan
Diskrit Model
Hasil percobaan pada tabel 1 dan 2, uji coba 2 memiliki hasil yang lebih cepat. Jika waktu yang dilakukan dalam segmentasi lebih cepat maka energy yang diperlukan untuk melakukan segmentasi pada citra semakin kecil. Perbandingan waktu segmentasi antara model sequential dan model diskrit dapat dilihat pada gambar 3.
Gambar 3 Perbandingan waktu segmentasi antara model sequential dan model diskrit pada uji coba 1
Hasil segmentasi dari kedua model bisa dilihat pada gambar 4.
(a)
(c)
(b)
(d) Gambar 4 (a) Model diskrit result (b) Model sequential result (c) Model diskrit after threshold (d)
Model sequential after threshold
4.2 Setting Parameter pada 2 model, jumlah
iterasi ditentukan oleh system.
Sequential model
Model sequential terdapat parameter yang dapat disetting yaitu nilai elastisitas region competition (λ), nilai kecepatan konstan (v) dan nilai dari aliran kelengkungan (μ). Uji coba kali ini nilai dari λ=1, v = - 0.5 , μ = 0.1. Iterasi akan sebanyak n kali ditentukan oleh system secara otomatis. Kemudian, perhitungan jumlah iterasi dan waktu yang diperlukan untuk melakukan segmentasi yang optimal dapat dilihat pada tabel 3.
Tabel 3 Perhitungan jumlah iterasi dan waktu untuk segmentasi model sequential
Citra Sub
Image Iterasi Waktu (s)
brain.bmp 1 4 2.1528 jaringan.bmp 1 4 41.0439 mamograph.bmp 1 4 8.1589 mri-stack.tif 27 104 1219.991 t1-rendering.tif 36 132 1819.486
Diskrit model
Parameter model diskrit yang dapat disetting adalah nilai elastisitas region competition region competition (λ), nilai alpha () dan beta (β). Uji coba kali ini nilai dari λ=1, β = 0.5 , = 0.1 , Iterasi akan sebanyak n kali ditentukan oleh system secara otomatis. Kemudian, perhitungan jumlah iterasi dan waktu yang diperlukan untuk melakukan segmentasi yang optimal dapat dilihat pada tabel 4.
Tabel 4 Perhitungan jumlah iterasi dan waktu untuk segmentasi model diskrit
Citra Sub Image Iterasi Waktu (s)
brain.bmp 1 5 0.0780
jaringan.bmp 1 3 0.5928
mamograph.bmp 1 4 0.3588
mri-stack.tif 27 153 25.662
t1-rendering.tif 36 176 21.8244
Perbandingan antara Sequential Model dan
Diskrit Model
Dari hasil percobaan pada tabel 3 dan 4, uji coba 4 memiliki hasil yang lebih cepat. Jika waktu yang dilakukan dalam segmentasi lebih cepat maka energy yang diperlukan untuk melakukan segmentasi pada citra semakin kecil. Perbandingan waktu segmentasi antara model sequential dan model diskrit dapat dilihat pada gambar 5 dan perbandingan jumlah iterasi dapat dilihat pada gmabar 6.
Gambar 5 Perbandingan waktu segmentasi antara model sequential dan model diskrit pada uji coba 2
Gambar 6 Perbandingan jumlah itersi segmentasi antara model sequential dan model diskrit pada uji
coba 2
Hasil segmentasi dari kedua model bisa dilihat pada gambar 7.
(a)
(c)
(b)
(d) Gambar 7 (a) Model diskrit result (b) Model sequential result (c) Model diskrit after threshold (d)
Model sequential after threshold
4.3 Kompetisi Region
Sequential model
Parameter model sequential yang dapat disetting adalah nilai elastisitas region competition (λ), nilai kecepatan konstan (v) dan nilai dari aliran kelengkungan (μ). Uji coba kali ini nilai dari λ=1, v = 0 , μ = 0.1. Iterasi akan sebanyak n kali ditentukan oleh system secara otomatis. Kemudian, perhitungan jumlah iterasi dan waktu yang diperlukan untuk melakukan segmentasi yang optimal dapat dilihat pada tabel 5.
Tabel 5 Perhitungan jumlah iterasi dan waktu untuk segmentasi model sequential
Citra Sub
Image Iterasi Waktu (s)
brain.bmp 1 4 3.0732 jaringan.bmp 1 4 42.3699 mamograph.bmp 1 4 8.5333 mri-stack.tif 27 104 1324.0269 t1-rendering.tif 36 135 1871.871
Diskrit model
Parameter model diskrit yang dapat disetting adalah nilai elastisitas region competition region competition (λ), nilai alpha () dan beta (β). Setting parameter untuk uji coba kali ini adalah nilai dari λ=1, β = 0 , = 0.1. Iterasi akan sebanyak n kali ditentukan oleh system secara otomatis. Kemudian, perhitungan jumlah iterasi dan waktu yang diperlukan untuk melakukan segmentasi yang optimal dapat dilihat pada tabel 6.
Tabel 6 Perhitungan jumlah iterasi dan waktu untuk segmentasi model diskrit
Citra Sub Image Iterasi Waktu (s)
brain.bmp 1 5 0.1092
jaringan.bmp 1 3 0.5616
mamograph.bmp 1 4 0.3432
mri-stack.tif 27 153 24.3204
t1-rendering.tif 36 176 20.0772
Perbandingan antara Sequential Model dan
Diskrit Model
Dari hasil percobaan pada tabel 5 dan 6, uji coba 6 memiliki hasil yang lebih cepat. Perbandingan waktu segmentasi antara model sequential dan model diskrit dapat dilihat pada gambar 8 dan perbandingan jumlah iterasi dapat dilihat pada gmabar 9.
Gambar 8 Perbandingan waktu segmentasi antara model sequential dan model diskrit pada uji coba 3
Gambar 9 Perbandingan jumlah itersi segmentasi antara model sequential dan model diskrit pada uji
coba 3
Hasil segmentasi dari kedua model bisa dilihat pada gambar 10.
(a)
(c)
(b)
(d) Gambar 10 (a) Model diskrit result (b) Model sequential result (c) Model diskrit after threshold (d)
Model sequential after threshold
4.4 Perbandingan Akurasi
Uji coba keempat adalah perbandingan hasil segmentasi, percobaan yang dilakukan pada hasil segmentasi uji coba pertama dengan dataset mri-stack.tif.
Perhitungan akurasi model sequential dan model diskrit dihitung pada setiap sub-image dari dataset mri-stack.tif dan jaringan.bmp. Semakin tinggi nilai prosentase nilai akurasinya, maka semakin tinggi tingkat keakuratan hasil proses segmentasi yang dilakukan oleh masing-masing proses.
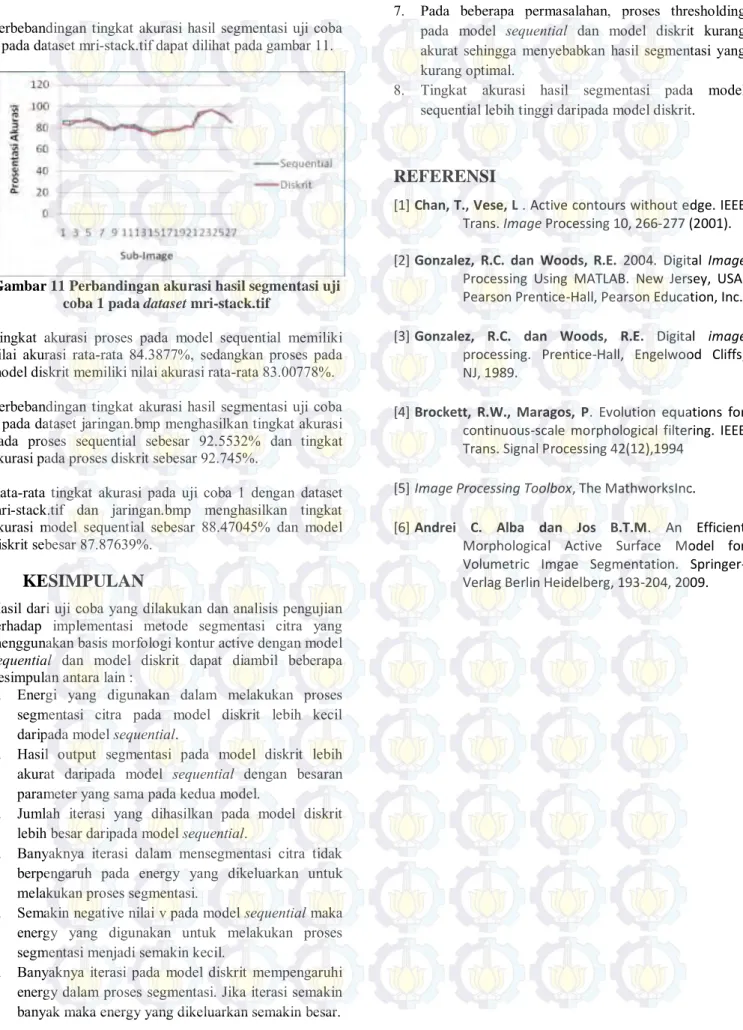
Perbebandingan tingkat akurasi hasil segmentasi uji coba 1 pada dataset mri-stack.tif dapat dilihat pada gambar 11.
Gambar 11 Perbandingan akurasi hasil segmentasi uji coba 1 pada dataset mri-stack.tif
Tingkat akurasi proses pada model sequential memiliki nilai akurasi rata-rata 84.3877%, sedangkan proses pada model diskrit memiliki nilai akurasi rata-rata 83.00778%. Perbebandingan tingkat akurasi hasil segmentasi uji coba 1 pada dataset jaringan.bmp menghasilkan tingkat akurasi pada proses sequential sebesar 92.5532% dan tingkat akurasi pada proses diskrit sebesar 92.745%.
Rata-rata tingkat akurasi pada uji coba 1 dengan dataset mri-stack.tif dan jaringan.bmp menghasilkan tingkat akurasi model sequential sebesar 88.47045% dan model diskrit sebesar 87.87639%.
5
KESIMPULAN
Hasil dari uji coba yang dilakukan dan analisis pengujian terhadap implementasi metode segmentasi citra yang menggunakan basis morfologi kontur active dengan model
sequential dan model diskrit dapat diambil beberapa
kesimpulan antara lain :
1. Energi yang digunakan dalam melakukan proses segmentasi citra pada model diskrit lebih kecil daripada model sequential.
2. Hasil output segmentasi pada model diskrit lebih akurat daripada model sequential dengan besaran parameter yang sama pada kedua model.
3. Jumlah iterasi yang dihasilkan pada model diskrit lebih besar daripada model sequential.
4. Banyaknya iterasi dalam mensegmentasi citra tidak berpengaruh pada energy yang dikeluarkan untuk melakukan proses segmentasi.
5. Semakin negative nilai v pada model sequential maka energy yang digunakan untuk melakukan proses segmentasi menjadi semakin kecil.
6. Banyaknya iterasi pada model diskrit mempengaruhi energy dalam proses segmentasi. Jika iterasi semakin banyak maka energy yang dikeluarkan semakin besar.
7. Pada beberapa permasalahan, proses thresholding pada model sequential dan model diskrit kurang akurat sehingga menyebabkan hasil segmentasi yang kurang optimal.
8. Tingkat akurasi hasil segmentasi pada model sequential lebih tinggi daripada model diskrit.
REFERENSI
[1] Chan, T., Vese, L . Active contours without edge. IEEE Trans. Image Processing 10, 266-277 (2001). [2] Gonzalez, R.C. dan Woods, R.E. 2004. Digital Image
Processing Using MATLAB. New Jersey, USA: Pearson Prentice-Hall, Pearson Education, Inc. [3] Gonzalez, R.C. dan Woods, R.E. Digital image
processing. Prentice-Hall, Engelwood Cliffs, NJ, 1989.
[4] Brockett, R.W., Maragos, P. Evolution equations for continuous-scale morphological filtering. IEEE Trans. Signal Processing 42(12),1994
[5] Image Processing Toolbox, The MathworksInc. [6] Andrei C. Alba dan Jos B.T.M. An Efficient
Morphological Active Surface Model for Volumetric Imgae Segmentation. Springer-Verlag Berlin Heidelberg, 193-204, 2009.