BAB 2
TINJAUAN PUSTAKA
2.1 Teori Graf
2.1.1 Definisi Graf
Graf G didefenisikan sebagai pasangan himpunan (V,E) yang dalam hal ini V adalah himpunan tidak kosong dari verteks (vertex atau node) = {v1, v2, ...,vn} dan E adalah
himpunan sisi (edge) yang menghubungkan sepasang verteks = {e1, e2, ... ,en}, atau
dapat ditulis singkat notasi G=(V,E). Hal ini berarti bahwa V tidak boleh kosong, sedangkan E boleh kosong. Jadi, sebuah graf dimungkinkan tidak memiliki sisi satu buah pun, tetapi verteksnya harus ada, minimal satu. Graf yang hanya memiliki satu buah verteks tanpa sebuah sisi pun dinamakan graf trivial. (Munir, 2003, hal: 291).
Verteks pada graf dapat dinomori dengan huruf, bilangan asli, atau gabungan keduanya. Sedangkan sisi yang menghubungkan verteks vi dan verteks vjdinyatakan
dengan pasangan (vi , vj) atau dengan lambang e1, e2, .... Dengan kata lain, jika e
adalah sebuah sisi yang menghubungkan verteks vi dengan vj, maka e dapat ditulis
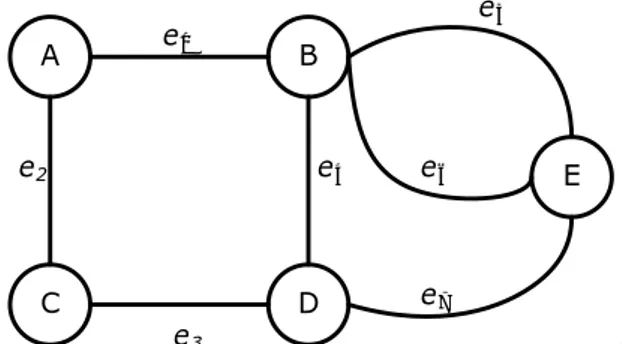
sebagai e = (vi , vj). A D E C B e1 e6 e5 e4 e2 e3 e7
G adalah graf dengan:
V = { a, b, c, d, e }.
E = { (a, b), (a, c), (c, d), (b, d), (b, e), (b, e), (d, e) }. = { e1, e2, e3, e4, e5, e6, e7}.
Verteks pada graf dapat merupakan obyek sembarang seperti kota, atom-atom suatu zat, nama anak, jenis buah, komponen alat elektronik dan sebagainya. Sisi dapat menunjukkan hubungan (relasi) sembarang seperti jalur penerbangan, jalan raya, sambungan telepon, ikatan kimia, dan lain-lain. Verteks dalam graf pada tulisan ini merupakan gedung atau persimpangan jalan dan sisi dalam graf merupakan jalan yang menghubungkan gedung atau persimpangan jalan.
2.1.2 Jenis-jenis Graf
Menurut arah dan bobotnya, graf dibagi menjadi empat bagian, yaitu:
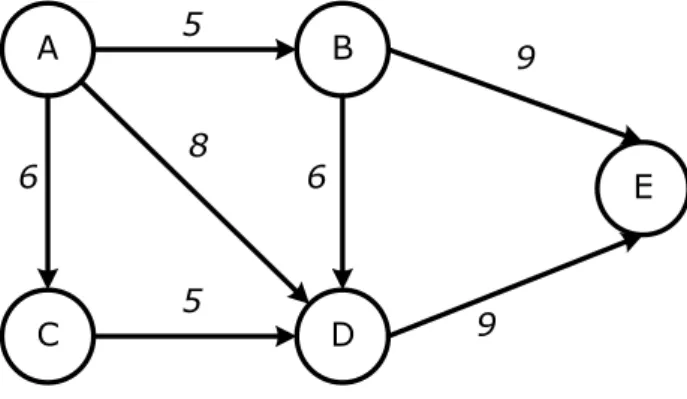
1. Graf berarah dan berbobot: tiap sisi mempunyai anak panah dan bobot.
A D E C B 5 9 6 5 6 8 9
Gambar 2.2 Graf Berarah dan Berbobot
Gambar 2.1 menunjukkan graf berarah dan berbobot yang terdiri dari lima verteks yaitu verteks A, B, C, D, dan E. Verteks A menujukkan arah ke verteks B, verteks C dan verteks D, verteks B menunjukkan arah ke verteks D, verteks C menunjukkan arah ke verteks D, dan seterusnya. Bobot antar verteks pun telah di ketahui.
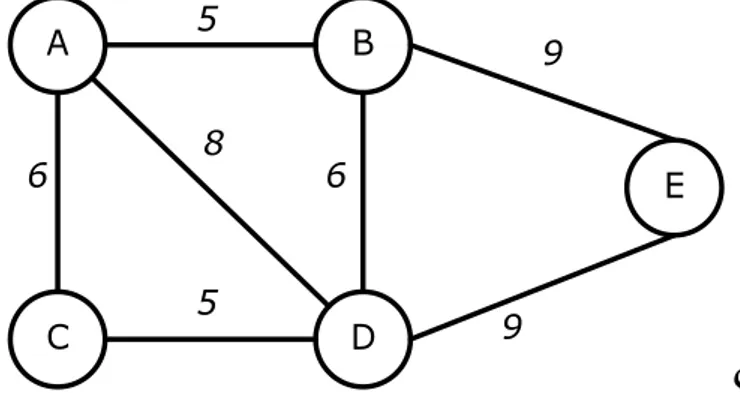
2. Graf tidak berarah dan berbobot: tiap sisi tidak mempunyai anak panah tetapi mempunyai bobot. A D E C B 5 9 6 5 6 8 9
Gambar 2.3 Graf Tidak Berarah dan Berbobot
Gambar 2.2 menunjukkan graf tidak berarah dan berbobot. Graf terdiri dari lima verteks yaitu verteks A, B, C, D, dan E. Verteks A tidak menunjukkan arah ke verteks B atau C, namun bobot antara verteks A dan verteks B telah diketahui. Begitu juga dengan verteks-verteks yang lain.
3. Graf berarah dan tidak berbobot: tiap sisi mempunyai anak panah yang tidak berbobot. Gambar 2.3 menunjukkan graf berarah dan tidak berbobot.
A
D
E
C
B
Gambar 2.4 Graf berarah dan tidak berbobot
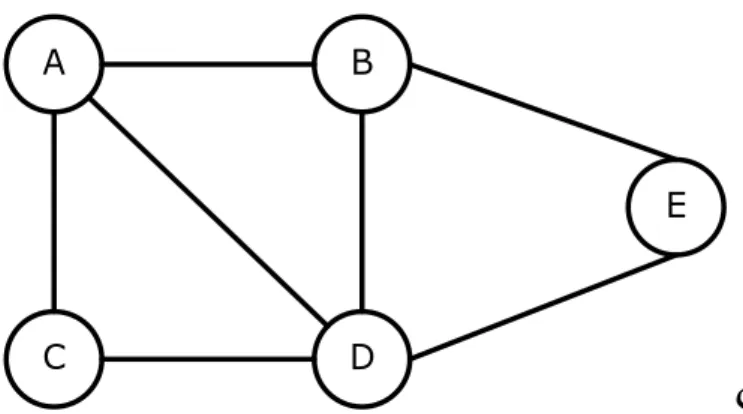
4. Graf tidak berarah dan tidak berbobot: tiap sisi tidak mempunyai anak panah dan tidak berbobot.
A
D
E
C
B
Gambar 2.5 Graf Tidak Berarah dan Tidak Berbobot
2.1.3 Lintasan
Misalkan v0 dan vn adalah verteks-verteks dalam sebuah graf. Sebuah lintasan dari v0
ke vn dengan panjang n adalah sebuah barisan berselang-seling dari n + 1 verteks dan n sisi yang berawal dari verteks v0 dan berakhir dengan verteks vn, (v0, e1, v1, e2, ..., v n-1, en, vn), dengan sisi ei insiden dengan verteks vi-1 dan vi untuk i = 1, ..., n.
(Jhonsonbaugh, 2002).
Jika graf yang ditinjau merupakan graf sederhana, maka lintasan cukup dituliskan sebagai barisan verteks: v0, v1, v2, …, vn-1, vn, karena antara dua buah verteks
yang berurutan dalam lintasan tersebut hanya terdapat satu sisi. Jika graf yang ditinjau memiliki sisi ganda, maka, lintasan ditulis sebagai barisan berselang-seling antara verteks dan sisi: v0, e1, v1, e2, v2, e3, …, vn-1, en, vn.
Verteks dan sisi yang dilalui di dalam lintasan boleh berulang. Sebuah lintasan yang semua verteksnya berbeda (setiap sisinya dilalui hanya sekali) dikatakan lintasan sederhana. Lintasan yang berawal dan berakhir pada verteks yang sama disebut lintasan tertutup (closed walk), sedangkan lintasan yang tidak berawal dan berakhir pada verteks sama disebut lintasan terbuka (open walk). Jalur dari suatu lintasan yang mana setiap verteksnya berbeda kecuali mungkin verteks awal boleh sama verteks akhir disebut closed path. Panjang lintasan adalah jumlah sisi yang muncul dalam suatu lintasan.
2.1.4 Representasi Graf
Munir (2003, hal: 318), menyatakan bahwa agar graf dapat diproses dalam program komputer, graf harus direpresentasikan ke dalam memori. Terdapat beberapa representasi untuk graf, antara lain matriks ketetanggaan, matriks bersisian dan senarai ketetanggaan.
2.1.4.1 Matriks Ketetanggaan (Adjacency Matrix)
Misalkan G = (V, E) graf sederhana dimana |V| = n, n > 1. Maka, matriks ketetanggaan A dari G adalah matriks n x n dimana:
A = [aij],
[aij] menjadi 1 bila verteks i dan j terhubung (bertetangga),
[aij] menjadi 0 bila verteks i dan j tidak terhubung (tidak bertetangga).
Dengan kata lain matriks ketetanggaan didefinisikan sebagai berikut, misalkan A
matriks berordo n x n (n baris dan n kolom). Jika antara dua verteks terhubung (adjacent) maka elemen matriks bernilai 1, dan sebaliknya jika tidak terhubung bernilai 0.
Jumlah elemen matriks bertetanggaan untuk graf dengan n verteks adalah n2. Jika tiap elemen membutuhkan ruang memori sebesar p, maka ruang memori yang diperlukan seluruhnya adalah pn2.
Keuntungan representasi dengan matriks ketetanggaan adalah kita dapat mengakses elemen matriksnya langsung dari indeks. Selain itu, kita juga dapat menentukan dengan langsung apakah verteks i dan verteks j bertetangga.
Pada graf berbobot, aij menyatakan bobot tiap sisi yang menghubungkan
verteks i dengan verteks j. Bila tidak ada sisi dari verteks i ke verteks j atau dari verteks j ke verteks i, maka, aij diberi nilai tak berhingga.
1
2
3
4
Gambar 2.6 Graf Matriks Ketetanggaan
Bentuk matriks ketetanggaan dari graf pada gambar 2.6 adalah
4 3 2 1 4 3 2 1
0
1
1
0
0
0
0
1
1
1
0
1
0
0
1
0
v
v
v
v
A
v
v
v
v
=
Seperti halnya matriks kedekatan, pada graf berbobot, aij menyatakan bobot
tiap sisi yang menghubungkan verteks i dengan verteks j. Bila tidak ada sisi dari verteks i ke verteks j atau dari verteks j ke verteks i, maka, aij juga diberi nilai tak
berhingga.
2.1.4.2 Matriks Bersisian (Incidency Matrix)
Misalkan G = (V, E) adalah graf dengan n verteks dan m sisi, maka matriks kebersisian A dari G adalah matriks berukuran m x n dimana:
A = [aij],
[aij] menjadi 1 bila verteks i dan sisi j bersisian,
[aij] menjadi 0 bila verteks i dan sisi j tidak bersisian.
Dengan kata lain matriks bersisian adalah matriks yang merepresentasikan hubungan antara verteks dan sisi. Misalkan A adalah matriks dengan m baris untuk setiap verteks dan n kolom untuk setiap sisi. Jika verteks terhubung dengan sisi, maka elemen
matriks bernilai 1. Sebaliknya, jika verteks tidak terhubung dengan sisi maka elemen matriks bernilai 0.
Gambar 2.7 Graf Matriks Bersisian
Bentuk matriks bersisian dari graf pada gambar 2.7 adalah
4 3 2 1 4 3 2 1
0
1
0
1
1
1
1
0
0
0
1
1
1
0
0
0
e
e
e
e
A
v
v
v
v
=
2.1.4.3 Senarai Ketetanggaan (Adjacency List)
Matriks ketetanggaan memiliki kelemahan apabila graf memiliki jumlah sisi yang relatif sedikit sehingga graf sebagian besar berisi bilangan 0. Hal ini merupakan pemborosan terhadap memori, karena banyak menyimpan bilangan 0 yang seharusnya tidak perlu disimpan. Untuk kepentingan efisiensi ruang, maka tiap baris matriks tersebut digantikan senarai yang hanya berisikan verteks-verteks dalam adjacency set Vx dari setiap verteks x.
Bentuk senarai ketetanggan graf dari gambar 2.7 diatas adalah 1: 3
2: 3,4 3: 1,2,4 4: 2,3
2.2 Permasalahan Optimasi
Menurut Hannawati et al (2002), optimasi adalah pencarian nilai-nilai variabel yang dianggap optimal, efektif dan efisien untuk mencapai tujuan yang diinginkan. Permasalahan optimasi beraneka ragam sesuai kondisi dimana sistem tersebut bekerja. Salah satu masalah optimasi yang paling sering muncul khususnya dalam bidang transportasi yaitu mengenai pencarian jalur terpendek. Optimisasi dalam jalur terpendek dapat didasarkan pada jarak tempuh terdekat menuju suatu fasilitas maupun berdasarkan waktu tercepat untuk mencapainya. Hasil dari penyelesaian masalah rute terpendek dapat disebut sebagai rute optimal.
2.2.1 Penyelesaian Masalah Optimasi
Secara umum penyelesaian masalah pencarian rute terpendek dapat dilakukan dengan menggunakan dua metode, yaitu metode konvensional dan metode heuristik. Metode konvensional diterapkan dengan perhitungan matematis biasa, sedangkan metode heuristik diterapkan dengan perhitungan kecerdasan buatan. (Mutakhiroh et al, 2007).
1. Metode Konvensional
Metode konvensional adalah metode yang menggunakan perhitungan matematis biasa. Ada beberapa metode konvensional yang biasa digunakan untuk melakukan pencarian rute terpendek, diantaranya: algoritma Djikstra (single source shortest path), algoritma Floyd-Warshall (all pairs shortest path), dan algoritma Bellman-Ford.
2. Metode Heuristik
Metode Heuristik adalah subbidang dari kecerdasan buatan yang digunakan untuk melakukan pencarian dan optimasi. Ada beberapa algoritma pada metode heuristik yang biasa digunakan dalam permasalahan optimasi, di antaranya algoritma semut, algoritma genetika, logika fuzzy, jaringan syaraf tiruan, tabu search, simulated annealing, dan lain-lain.
Persoalan yang berkaitan dengan optimisasi sangat kompleks dalam kehidupan sehari-hari. Nilai optimal yang didapat dalam optimisasi dapat berupa besaran panjang, waktu, jarak dan lain-lain. Berikut ini adalah beberapa persoalan yang memerlukan optimisasi: menentukan rute terpendek dari suatu tempat ke tempat yang lain, menentukan jumlah pekerja seminimal mungkin untuk melakukan suatu proses produksi agar pengeluaran biaya pekerja dapat diminimalkan dan hasil produksi tetap maksimal, mengatur rute kendaraan umum agar semua lokasi dapat dijangkau, mengatur routing jaringan kabel telepon agar biaya pemasangan kabel tidak terlalu besar.
2.3 Permasalahan Rute Terpendek (Shortest Path Problem)
Permasalahan rute terpendek (Shortest Path Problem) merupakan suatu jaringan pengarahan perjalanan dimana seseorang pengarah jalan ingin menentukan rute terpendek antara dua kota berdasarkan rute alternatif yang tersedia, dimana kota tujuan hanya satu. Masalah ini sendiri menggunakan representasi graf untuk memodelkan persoalan yang diwakili sehingga lebih memudahkan penyelesaiannya. Masalahnya adalah bagaimana cara mengunjungi verteks pada graf dari verteks awal ke verteks akhir dengan bobot minimum, dimana dalam hal ini bobot yang digunakan adalah jarak dan kota-kota yang dikunjungi diasumsikan sebagai graf yang saling terhubung (connected graf) antar suatu kota dengan kota yang lainnya. Graf G disebut terhubung jika untuk setiap verteks dari graf terdapat sisi yang menghubungkan kedua verteks tersebut, atau dengan kata lain graf terhubung jika setiap dua verteks yaitu vi
dan vj dalam suatu graf terdapat sedikitnya sebuah sisi. Sisi pada graf berarah
disebut arc.
Berdasarkan data diatas, dapat dihitung rute terpendek dengan mencari jarak antara rute-rute tersebut. Apabila jarak antar rute belum diketahui, jarak dapat dihitung berdasarkan koordinat tempat tersebut, kemudian menghitung rute terpendek yang dapat dilalui.
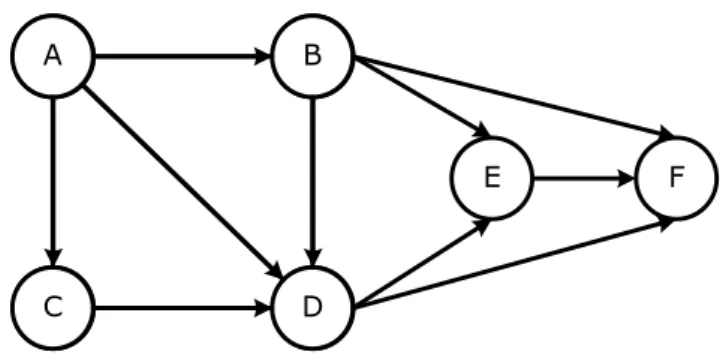
A D F C B A D E C B
Gambar 2.8 Graf yang Berarah dan Tidak Berbobot.
Pada gambar 2.8 diatas, misalkan kita dari verteks A ingin menuju verteks F. Untuk menuju verteks F, dapat dipilih beberapa rute yang tersedia yaitu:
A → B → E → F A → B → F A → B → D → E → F A → C → D → F A → C → E → F A → D → F A → D → E → F
Rute terpendek dari ketujuh rute yang tersedia belum dapat ditentukan karena jarak atau bobot dari setiap sisi tidak diketahui. Rute terpendek dari verteks A menuju verteks F dapat dihitung dengan mencari jarak diantara sisi-sisi tersebut. Apabila jarak antar sisi belum diketahui, jarak dapat dihitung berdasarkan koordinat verteks-verteks tersebut, kemudian menghitung jalur terpendek yang dapat dilalui.
2.4 Algoritma Semut
Algoritma Semut merupakan teknik probabilistik untuk menyelesaikan masalah komputasi dengan menemukan rute optimum. Algoritma Semut diperkenalkan oleh Moyson dan Manderick pada tahun 1996 dan secara meluas dikembangkan oleh Marco Dorigo.
2.4.1 Cara Kerja Algoritma Semut Mencari Rute Terpendek
Untuk mendiskusikan algoritma semut, lingkungan yang akan kita gunakan adalah sebuah graf yang fully connected (setiap verteks memiliki sisi ke verteks yang lain) dan bidirectional (setiap rute bisa ditempuh bolak-balik dua arah). Setiap sisi memiliki bobot yang menunjukkan jarak antara dua buah verteks yang dihubungkan oleh sisi tersebut.
Algoritma Semut ini menggunakan sistem multiagen, yang berarti kita akan mengerahkan seluruh “semut buatan” yang masing-masingnya bergerak sebagai agen tunggal. Setiap semut memiliki daftar_kotayang akan menyimpan sisi-sisi yang sudah pernah ia lalui, dimana ia tidak diijinkan untuk melalui sisi yang sama dua kali dalam satu kali perjalanan.
Semut mampu mengindera lingkungannya yang kompleks untuk mencari
makanan dan kemudian kembali ke sarangnya dengan meninggalkan zat feromon pada rute-rute yang mereka lalui. Feromon adalah zat kimia yang berasal dari kelenjar endokrin dan digunakan oleh makhluk hidup untuk mengenali sesama jenis, individu lain, kelompok, dan untuk membantu proses reproduksi. Berbeda dengan hormon, feromon menyebar ke luar tubuh dapat mempengaruhi dan dikenali oleh individu lain yang sejenis (satu spesies). Proses peninggalan feromon ini dikenal sebagai stigmergy, sebuah proses memodifikasi lingkungan yang tidak hanya bertujuan untuk mengingat jalan pulang ke sarang, tetapi juga memungkinkan para semut berkomunikasi dengan koloninya. Seiring waktu, bagaimanapun juga jejak feromon akan menguap dan akan
mengurangi kekuatan daya tariknya. Lebih lama seekor semut pulang pergi melalui rute tersebut, lebih lama jugalah feromon menguap.
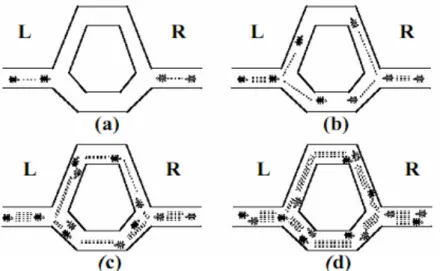
Gambar 2.9 Perjalanan Semut Menemukan Sumber Makanan
(Sumber:Menentukan Jalur Terpendek Menggunakan Algoritma Semut, Muttakhiroh)
Gambar 2.9.a menujukkan perjalanan semut dalam menemukan rute terpendek dari sarang ke sumber makanan, terdapat dua kelompok semut yang melakukan perjalanan. Kelompok semut L berangkat dari arah kiri ke kanan dan kelompok semut R berangkat dari kanan ke kiri. Kedua kelompok berangkat dari titik yang sama dan dalam posisi pengambilan keputusan jalan sebelah mana yang akan diambil. Kelompok L membagi dua kelompok lagi. Sebagian melewati jalan atas dan sebagian melewati jalan bawah. Hal ini juga berlaku pada kelompok R.
Gambar 2.9.b dan gambar 2.9.c menunjukkan bahwa kelompok semut berjalan pada kecepatan yang sama dengan meninggalkan feromon atau jejak kaki di jalan yang telah dilalui. Feromon yang ditinggalkan oleh kumpulan semut yang melewati jalan atas telah mengalami banyak penguapan karena semut yang melewati jalan atas berjumlah lebih sedikit dibandingkan jalan yang di bawah. Hal ini disebabkan jarak yang ditempuh lebih panjang dibandingkan jalan yang di bawah. Sedangkan feromon yang berada pada bagian bawah penguapannya cenderung lebih lama. Karena semut yang melewati jalan bawah lebih banyak daripada semut yang melewati jalan atas.
Gambar 2.9.d menunjukkan bahwa semut-semut yang lain pada akhirnya memutuskan untuk melewati jalan bawah karena feromon yang ditinggalkan masih banyak, sedangkan feromon pada jalan atas sudah banyak menguap sehingga semut-semut tidak memilih jalan atas. Semakin banyak semut-semut yang melewati jalan maka semakin banyak semut yang mengikutinya, semakin sedikit semut yang melewati jalan, maka feromon yang ditinggalkan semakin berkurang bahkan hilang. Dari sinilah kemudian terpilihlah rute terpendek antara sarang dan sumber makanan.
Secara ringkas diperlukan beberapa proses agar semut mendapatkan rute optimal yaitu:
1. Semut akan berkeliling secara acak dari sarang hingga menemukan sumber makanan.
2. Ketika menemukan sumber makanan mereka kembali ke sarang sambil meninggalkan tanda menggunakan feromon.
3. Seekor semut yang menemukan rute optimal akan menempuh rute ini lebih cepat dari rekan-rekannya, melakukan round-trip lebih sering, dan dengan sendirinya meninggalkan feromon lebih banyak dari rute-rute yang lebih lambat ditempuh.
4. Feromon yang berkonsentrasi tinggi pada akhirnya akan menarik semut-semut lain untuk berpindah rute, menuju rute paling optimal, sedangkan rute lainnya akan ditinggalkan.
5. Pada akhirnya semua semut yang tadinya menempuh rute yang berbeda - beda akan beralih ke sebuah rute paling optimal dari sarang menuju ke tempat makanan.
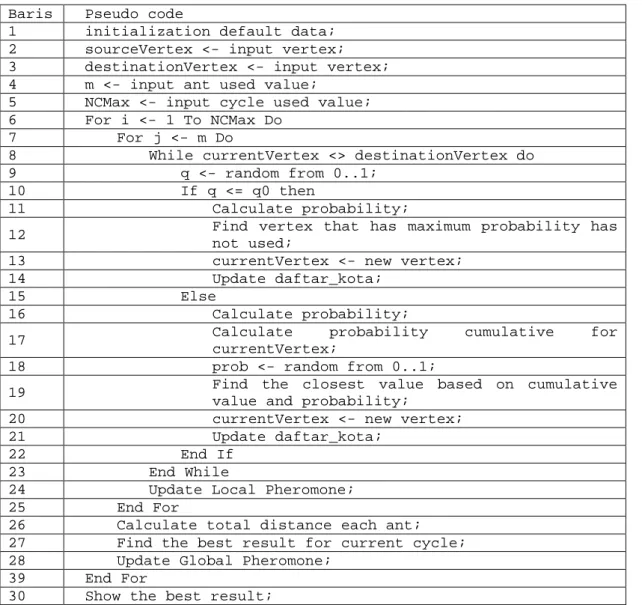
2.4.2 Pseudocode Algoritma Semut
Pseudeocode Algoritma Semut ditunjukkan oleh tabel 2.1 dibawah ini:
Tabel 2.1 Pseudocode Algoritma Semut
Baris Pseudo code
1 initialization default data;
2 sourceVertex <- input vertex;
3 destinationVertex <- input vertex;
4 m <- input ant used value;
5 NCMax <- input cycle used value;
6 For i <- 1 To NCMax Do
7 For j <- m Do
8 While currentVertex <> destinationVertex do
9 q <- random from 0..1;
10 If q <= q0 then
11 Calculate probability;
12 Find vertex that has maximum probability has
not used;
13 currentVertex <- new vertex;
14 Update daftar_kota;
15 Else
16 Calculate probability;
17 Calculate probability cumulative for
currentVertex;
18 prob <- random from 0..1;
19 Find the closest value based on cumulative
value and probability;
20 currentVertex <- new vertex;
21 Update daftar_kota;
22 End If
23 End While
24 Update Local Pheromone;
25 End For
26 Calculate total distance each ant;
27 Find the best result for current cycle;
28 Update Global Pheromone;
39 End For
30 Show the best result;
2.5 Sistem Informasi Geografis
Menurut Purwadhi (1994), “Sistem Informasi Geografis merupakan suatu sistem yang mengorganisasi perangkat keras (hardware), perangkat lunak (software), dan data, serta dapat mendayagunakan sistem penyimpanan, pengolahan maupun analisis data secara simultan, sehingga dapat diperoleh informasi yang berkaitan dengan aspek keruangan”.
Menurut Gou Bo, Sistem Informasi Geografis adalah teknologi informasi yang dapat menganalisis, menyimpan dan menyimpan baik data spasial maupun data non spasial. Sedangkan menurut Nicholas Chrisman, Sistem Informasi Geografis adalah sistem yang terdiri dari perangkat keras, perangkat lunak, data, manusia, organisasi dan lembaga yang digunakan untuk mengumpulkan, menyimpan, menganalisisis, dan menyebarluaskan informasi mengenai daerah-daerah di permukaaan bumi. (Prahasta, 2009).
Berdasarkan keterangan diatas dapat disimpulkankan bahwa Sistem Informasi Geografis (SIG) merupakan sistem infomasi berbasis komputer yang menggabungkan antara unsur peta (geografis) dan informasi tentang peta tersebut (data atribut) yang dirancang untuk mendapatkan, mengolah, memanipulasi, analisa, memperagakan dan menampilkan data spatial untuk menyelesaikan perencanaan, mengolah dan meneliti permasalahan.
Salah satu alasan mengapa konsep-konsep Sistem Informasi Geografis (SIG) beserta sistem aplikasinya menjadi menarik untuk digunakan di berbagai disiplin ilmu karena SIG dapat menurunkan informasi secara otomatis tanpa keharusan untuk selalu melakukan interpretasi secara manual sehingga SIG dengan mudah dapat menghasilkan data spasial tematik yang merupakan (hasil) turunan dari data spasial yang lain (primer) dengan hanya memanipulasi atribut-atributnya dengan melibatkan beberapa operator logika dan matematis. (Prahasta, 2009).
Sistem Informasi Geografis menggunakan sistem basis data dengan kemampuan khusus untuk data yang tereferensi secara geografis berikut sekumpulan operasi-operasi yang mengelola data tersebut. Sistem Informasi Geografis dibutuhkan karena untuk data spasial penanganannya sangat sulit terutama karena peta dan data statistik cepat kadaluarsa hingga tidak ada pelayanan penyediaan data dan informasi yang dFiberikan menjadi tidak akurat. Oleh karena itu Sistem Informasi Geografis merupakan suatu sistem yang menarik, sistem yang cenderung dibuat interaktif ini dapat mengintegrasikan data spasial (peta vektor dan citra digital), atribut (tabel sistem database), audio, video dan lain sebagainya. Hasil integrasi tersebut membuat
Sistem Informasi Geografis memiliki berbagai fungsionalitas, antara lain adalah sebagai berikut:
1. Kemampuan dasarnya sebagai mapping system dengan kemampuan kartografisnya.
2. Melakukan query terhadap data spasial ataupun data atribut yang terkait.
3. Menampilkan dan mengolah data permukaan tiga dimensi sebagai alat bantu pemodelan dengan aspek tiga dimensi.
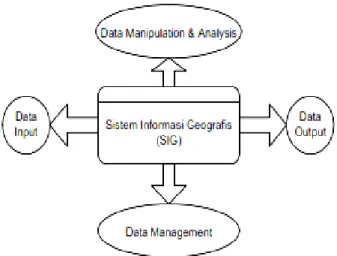
2.5.1 Subsistem Sistem Informasi Geografis
Menurut Prahasta (2009), Sistem Informasi Geografis (SIG) dapat diuraikan menjadi beberapa subsistem berikut:
1. Data Input
Subsistem ini bertugas untuk mengumpulkan dan mempersiapkan data spasial dan atribut dari berbagai sumber. Subsistem ini bertanggung jawab dalam mengkonversi atau mentransformasikan format data aslinya ke dalam format yang dapat digunakan oleh SIG.
2. Data Output
Subsistem ini menampilkan atau menghasilkan keluaran seluruh atau sebagian basis data baik dalam bentuk softcopy maupun bentuk hardcopy seperti tabel, grafik, peta dan lain-lain.
3. Data Management
Subsistem ini mengorganisasikan baik data spasial maupun atribut ke dalam sebuah basis data sedemikian rupa sehingga mudah dipanggil, diperbarui, dan dirubah.
4. Data Manipulation & Analysis
Subsistem ini menentukan informasi-informasi yang dapat dihasilkan oleh SIG. Selain itu, subsistem ini juga melakukan manipulasi dan pemodelan data untuk menghasilkan informasi yang diharapkan.
Gambar 2.10. Subsistem Sistem Informasi Geografis (Sumber: Konsep-konsep Dasar SIG, Prahasta, Informatika)
2.5.2 Komponen Sistem Informasi Geografis
Sistem Informasi Geografis merupakan hasil dari beberapa komponen. Komponen Sistem Informasi Geografis terbagi menjadi empat, yaitu sebagai berikut:
1. Perangkat Keras (Hardware)
Sistem Informasi Geografis membutuhkan komputer untuk menyimpan data dan dalam melakukan pengolahan data. Semakin kompleks data yang ingin diolah, maka semakin besar juga kebutuhan memori dan kecepatan pengolah datanya.
2. Perangkat Lunak (Software)
Perangkat lunak dibutuhkan untuk memasukkan, menyimpan dan mengeluarkan data bila diperlukan. Perangkat lunak Sistem Informasi Geografis harus memiliki beberapa elemen seperti mampu melakukan input
dan transformasi data geografis, sistem manajemen basis data, mampu mendukung query geografis, analisis dan visualisasi, dan memiliki Grafical User Interface (GUI) untuk memudahkan akses.
3. Data
Dalam SIG semua data dasar geografis harus diubah terlebih dahulu ke dalam bentuk digital untuk memudahkan dalam pengolahan data. Data dalam SIG dibagi menjadi dua bentuk yakni geografical atau data spasial dan data atribut.
a. Data spasial adalah data hasil pengukuran, pencatatan dan pencitraan terhadap suatu unsur keruangan yang berada di bawah, pada atau di atas permukaan bumi dengan posisi keberadaannya mengacu pada sistem koordinat nasional.
b. Data atribut adalah gambaran data yang terdiri dari informasi yang relevan terhadap suatu lokasi seperti kedalaman, ketinggian, lokasi penjualan, dan lain-lain dan bisa dihubungkan dengan lokasi tertentu dengan maksud untuk memberikan identifikasi seperti alamat, kode pos, dan lain-lain.
4. Manusia (Brainware)
Manusia dibutuhkan untuk mengendalikan seluruh Sistem Informasi Geografis. Adanya koordinasi dalam Sistem Informasi Geografis sangat diperlukan agar informasi yang diperoleh menjadi benar, tepat dan akurat.
2.5.3 Model Data dalam Sistem Informasi Geografis
Menurut Tim Penulis (2009, hal: 23), data yang dipergunakan dalam Sistem Informasi Geografis umumnya dapat dibagi menjadi tiga bagian besar yaitu:
1. Data Grafis
Data grafis dibagi menjadi data raster dan data digital:
a. Data raster adalah semua data digital yang didapatkan dari hasil scanning
dan data lain yang belum dalam format vektor.
b. Data Digital adalah data digital yang didapat dari hasil digitasi dan telah dilengkapi dengan data teks maupun data atribut lainnya.
2. Data Tabular
Data Tabular adalah data selain data grafis yang berupa data pendukung berupa teks, angka, dan data pendukung yang lain.
3. Data Vektor
Data vektor adalah data digital atau data yang telah diubah ke bentuk digital dan telah dilengkapi dengan data objek atau informasi objek.
Dalam tugas akhir ini yang digunakan adalah data vektor. Karena peta dalam bentuk vektor tidak terpengaruh oleh resolusi, karena itu apabila peta dibesarkan atau dkecilkan akan tidak mengalami pixelate. Di sisi lain, peta dalam bentuk vektor juga menghasilkan file dalam ukuran yang lebih kecil dari raster, sehingga dapat lebih menghemat memori.
2.6 MapWindow
MapWindow adalah Programmable Geographic Information System yang mendukung manipulasi, analisis, dan melihat data geospasial dan data atribut terkait dalam beberapa standar data format SIG. MapWindow dikembangkan oleh Prof. Daniel P
Ames, dan Jeff Horsbaugh dari Utah State University (USU). MapWindow merupakan alat pemetaan, sistem pemodelan SIG, dan aplikasi SIG programming interface (API) yang semuanya dikemas dalam satu paket. MapWindow dikembangkan untuk mengatasi kebutuhan pemrograman SIG yang dapat digunakan dalam rekayasa penelitian dan proyek perangkat lunak tanpa membeli sistem SIG yang lengkap atau tanpa menjadi ahli SIG sebelumnya.
2.6.1 Aplikasi MapWindow
MapWindow merupakan sofware aplikasi berlabel free, salah satu perangkat lunak untuk Sistem Informasi Geografis (SIG) yang berbasis open source. MapWindow bersifat free baik dalam hal lisensi pemakaian maupun pengembangannya. MapWindow dapat digunakan untuk berbagai keperluan, misalnya:
1. Sebagai alternatif desktop SIG yang open source. 2. Untuk mengkonversi data ke bentuk lain.
3. Untuk mengembangkan dan mendistribusikan alat yang berkaitan dengan analisis data spasial.
4. Melakukan task sebagaimana perangkat lunak SIG lainnya.
2.6.2 Fitur Utama MapWindow
Menurut Usman et al (2008, hal: 7), fitur utama sekaligus yang menjadi keunggulan MapWindow sebagai aplikasi SIG adalah:
1. MapWindow merupakan perangkat lunak programmable geografic information system yang digunakan untuk memanipulasi, menganalisis, menampilkan data geospasial dan mengelompokkan data yang beratribut geografis dalam beberapa format data SIG yang standar. MapWindow dapat digunakan sebagai tool untuk pemetaan, pemodelan dengan SIG dan antar muka pada program SIG.
2. Layaknya perangkat lunak open source, MapWindow bebas digunakan dan didistribusikan. MapWindow juga boleh dimodifikasi dan diintegrasikan dengan perangkat lunak yang lain sesuai dengan kebutuhan si pemakai.
3. MapWindow tidak hanya sekedar menampilkan data tetapi merupakan perangkat lunak SIG yang terbuka dan fleksibel sehingga bisa dikembangkan lebih lanjut. Ini berarti pengguna yang sudah matang dapat mengembangkan program tambahan dalam bentuk plug-in untuk meningkatkan fungsinya (misalnya plug-in untuk pemodelan, penampilan spesifik, dan editor data).
Plug-in yang ditulis selanjutnya bisa dibagikan atau didistribusikan.
4. MapWindow memiliki fasilitas SIG yang standar untuk visualisasi data,
editing atribut pada tabel (*.dbf), editing shape file dan konversi data. Puluhan format data SIG bisa ditangani MapWindow termasuk shape file, GeoTIFF, ESRI ArcInfo ASCII dan Binary.
Adapun tampilan dari MapWindow dapat dilihat pada gambar dibawah ini:
2.6.3 Komponen MapWindow
Menurut Usman et al (2008, hal: 9), perangkat lunak mapwindow terdiri dari tiga komponen utama, yaitu Main MapWindow Application, Core Component, dan Plug-in.
1. Main MapWindow Apllication
Merupakan pusat antarmuka MapWindow. Dari sini kita dapat menampilkan elemen-elemen data seperti shape file dan grid.
2. Core Componen
Merupakan komponen yang dioperasikan didalam MapWindow. Core componen terdiri dari 3 bagian yaitu MapWinGIS, MapWinInterfaces, dan
MapWinGeoProc.
3. Plug-in
Merupakan tool khusus yang ditulis menambah kemampuan Main MapWindow Apllication. Empat plug-in sudah dibuat didalam aplikasi main MapWindow, yaitu Table Editor, Shape file Editor, GIS Tools, dan Feature Identifier/ Labeler. Plug-in yang lain dikembangkan oleh masyarakat pengguna untk berbagai keperluan dan tersedia di situs MapWindow (www.mapwindow.org).