II-1
BAB II
TINJAUAN PUSTAKA
Bab ini berisi tinjauan pustaka yang memuat teori-teori dan menjadi dasar penelitian serta mendukung analisis dalam pemecahan masalah yang terdapat dalam penelitian.
2.1. ELEKTROMIOGRAFI
Elektromigrafi (Electromyogram atau EMG) merupakan evaluasi dan kajian otot berdasarkan pendeteksian aktivitas elektrik pada otot (Gamet & Fokapu, 2008). Aktivitas elektrik ini terjadi sebelum otot berkontraksi, kemudian aktivitas ini dikirim oleh saraf sampai pada otot maka otot akan berkontraksi. Aktivitas elektrik ini dapat dideteksi menggunakan cara yang sederhana yaitu menggunakan elektroda. EMG mengkaji langkah-langkah yang tepat dalam memperoleh informasi mengenai aktivasi elektrik otot dari saraf menuju serat otot.
Pemahaman sinyal myoeletric sangat bergantung pada fungsi dan anatomi sistem saraf. Otot rangka terdiri dari sel otot yang tersusun secara paralel yang membentuk serat otot. Setiap otot memiliki sistem rangsang untuk menangkap aktivitas elektrik. Namun dalam mengkaji bagaimana sinyal myoelectric dihasilkan oleh aktivitas elektrik perlu dipahami mengenai saraf yang mentransmisikan perintah menuju motor. Sistem saraf terdiri dari kumpulan bagian fungsional yang disebut motor units (MU).
2.1.1. Motor Unit (MU)
MU memeiliki kemampuan berkontraksi sesuai perintah rangsangan. Saraf memberikan rangsangan pada sel otot. Sel ini bereaksi pada seluruh keadaan diluar baik mekanis, kimia, atau listrik alam. Karena sel ini merupakan sel hidup maka memiliki polaritas pada kedua ujung cytoplasmic membrane. Elektroda dapat digunakan untuk mengukur perbedaan potensial pada bagian luar sel dengan bagian dalam sel. Setelah rangsangan pada sel otot selanjutnya sel akan bereaksi dengan polaritas elektrik pada membran yang disebut Action Potential (AP). AP disalurkan atau dikirim dari sebuah akson menuju sel otot melalui saluran yang disebut Neuro Muscular Junction (NMJ). MU akan berkumpul dengan ribuan MU
II-2
yang lain sehingga membentuk jaringan yang lebih besar hingga terbentuklah sebuah otot yang besar.
Gambar 2. 1. Motor Unit (MU) Sumber: Konrad (2005) 2.1.2. Asal Sinyal Myoelectric
Aktifitas dari sebuah sel dapat diambil dan menggambarkan muscle fiber action potential (MFAP). Kecepatan perambatan MFAP pada serat otot kurang lebih 2-5m/s. Saat motoneuron aktif, AP mengirimkan sinyal dan merambat pada akson. AP di kirim oleh NMJ menuju serat otot dan setiap serat otot menghasilkan MFAP. Setiap otot akan menghasilkan MFAP, sedangkan pada satu organ jaringan otot terdiri dari ribuan serabut otot, akan terdapat ribuan MFAP pada otot ini. Hasil penjumlah seluruh MFAP pada otot membentuk Motor Unit Action Potential (MUAP). MUAP ini akan dideteksi dengan elektroda. Besarnya nilai atau kekuatan MUAP bergantung pada elektroda yang digunakan, jarak elektroda dengan serat otot, dan densitas sisi yang dideteksi. MUAP yang ditangkap oleh elektroda ini disebut sebagai sinyal myoelectric.
Gambar 2. 2. Action Potential Sumber: Konrad (2005)
II-3
Elektroda permukaan digunakan untuk menangkap MUAP atau sinyal myoelectric. MUAP yang ditangkap sangat banyak karena elektroda diletakkan pada permukaan kulit. Sinyal dengan amplitudo besar didapatkan pada bagian serat otot yang dekat dengan elektroda.
Gambar 2. 3. Motor Units Action Potential (MUAP) 2.1.3. Rantai Pemrosesan Sinyal Myoelectric
Pengukuran sinyal myoelectric terdiri dari tiga langkah dasar yaitu deteksi, pengkondisian sinyal, akuisisi dan pemrosesan sinyal (Franklin & de Weille, 2006). Kekuatan sinyal myoelectric sangat kecil yaitu dalam kisaran microvolt atau milivolt. Kekuatan sinyal ini sangat mudah terpengaruh oleh noise. Performa dari masing-masing komponen pengukuran dan penangkapan sinyal myoelectric sangat mempengaruhi kulitas sinyal. Semakin tinggi performa dari masing-masing bagian akan menghasilkan sinyal myoelectric dengan kualitas yang lebih baik. 2.1.4. Pendeteksian Sinyal Myoelectric
Deteksi sinyal myoelectric dilakukan dengan elektroda tertentu. Elektroda yang ditempel di permukaan kulit akan bersentuhan atau menempel pada otot. Elektroda harus dibuat dari bahan yang aman dan tidak beracun bagi subjek. Elektroda juga dibuat dari bahan yang tidak mudah mengalami polarisasi saat arus listrik mengalir pada elektroda. Silver cloride (AgAgCl) merupakan elektroda sensor. Besarnya sinyal myoelectric bergantung pada posisi elektroda pada permukaan kulit.
II-4
Tiga elektroda digunakan dalam pendeteksian sinyal myoelectric, dua elektroda dihubungkan pada input dengan impedansi tingga dan elektroda ketiga sebagai ground yang diletakkan pada input dengan impedansi rendah.
Mode deteksi dilakukan dalam dua cara yaitu monopolar dan bipolar. Deteksi monopolar hanya melibatkan satu elektroda aktif dan memberikan informasi mengenai perubahan potensial pada daerah deteksi. Metode deteksi ini mengharuskan elektroda kedua diletakkan pada daerah aktif seperti pergelangan tangan atau kaki. Deteksi bipolar, dua elektroda diletakkan pada jarak tertentu sehingga terjadi beda potensial diantara kedua elektroda. Beda potensial ini menghilangkan noise sehingga diperoleh sinyal dengan kualitas yang lebih baik.
Gambar 2. 4. Pendeteksian Monopolar
Sumber: Gamet & Fukopu (2008)
Gambar 2. 5. Pendeteksian Bipolar
Sumber: Gamet & Fukopu (2008) 2.1.5. Jenis Elektroda
Terdapat dua jenis elektroda yang dapat digunakan dalam mendeteksi sinyal myoelectric yaitu invasive electrode dan non-invasive electrode. Invasive electrode merupakan elektroda berbentuk jarum dan cara penggunaanya dengan menusukkanya ke dalam otot. Non-invasive electrode merupakan elektroda yang
II-5
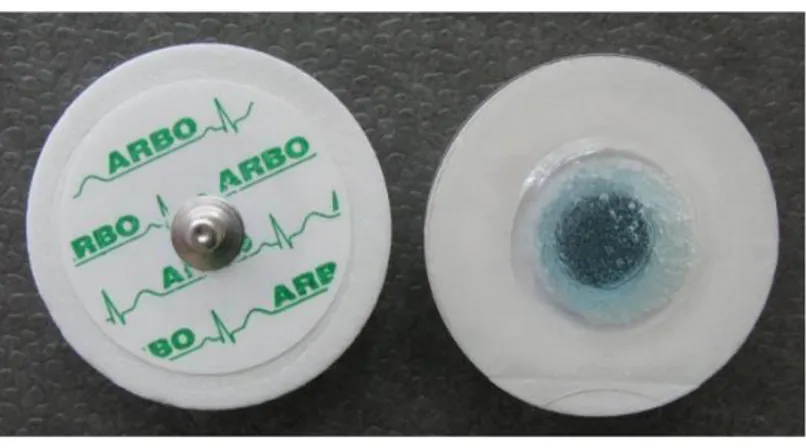
penggunaannya dengan ditempelkan pada permukaan kulit. Jenis elektroda ini banyak digunakan karena sifatnya yang tidak merusak subjek. Contoh non-invasive electrodes adalah elektroda permukaan AgAgCl.
Gambar 2. 6. Elektroda permukaan AgAgCl Sumber: henleys medical supplies 2.1.6. Penempatan Elektroda pada Permukaan Kulit
Sebelum elektroda ditempelkan pada permukaan kulit maka dibutuhkan langkah pembersihan pada permukaan kulit agar jaringan kulit mati dan rambut pada permukaan kulit tidak mempengaruhi elektroda saat menangkap sinyal. Teknik yang dapat dilakukan untuk membersihkan permukaan kulit adalah dengan memanfaatkan alkohol dan melakukan pencukuran rambut pada permukaan kulit.
Elektroda diletakkan secara paralel terhada serabut otot. Posisi terbaik dapat dipilih pada saat otot mengalami fase kontraksi. Peletakan elektroda sebaiknya berjarak 20mm satu sama lain namu harus disesuaikan untuk otot dengan ukuran kecil (Hermens dkk, 1999).
2.1.7. Persiapan Sinyal dan Perekaman Data
Tujuan utama dilakukannya persiapan sirkuit sinyal adalah merubah sensor output kedalam bentuk yang secara optimal sinyal dapat dirubah dalam aliran data angka berdasarkan waktu. Persiapan sirkuit sinyal terdiri dari tiga bagian utama yaitu preamplification, filtering, dan amplification.
1. Preamplification
Merupakan tahap mendorong skala sinyal eletrik yang ditangkap oleh elektroda. Persiapan dan penyetelan sirkuit instrumentasi amplifier sangat penting. Preamplification dirangkai untuk memenuhi kebutuhan akurasi dan perbesaran yang stabil, mampu mengakomodasi tingkat impedansi input yang sangat tinggi dan mengakomodasi tingkat impedansi output yang sangat rendah, dan Comont
II-6
Rejection Ratio (CMR) yang sangat tinggi mencapai 110dB. Sinyal yang berasal dari elektroda memiliki tingkat impedansi yang tinggi dan amplitudo rendah maka preamplification mengambil peran sebagai perubah impedansi.
2. Filtering
Filter merupakan bagian yang akan menghilangkan frekuensi yang tidak relevan, electrical noise, sehingga hanya menyisakan sinyal myoelectric yang akan diukur dan direkam. Sinyal terbaik dapat diperoleh dengan mengaplikasikan low-passs dan high-pass filter. High-pass filter menghilangkan komponen yang tidak stabil seperti artefak karena gerakan kabel. Low-pass filter membatasi karakteristik spektral sinyal. Filter merupakan peralatan analog sehingga rentang (bandwidth) frekuensi yang akan di filter dapat diatur sesuai kebutuhan.
3. Amplification
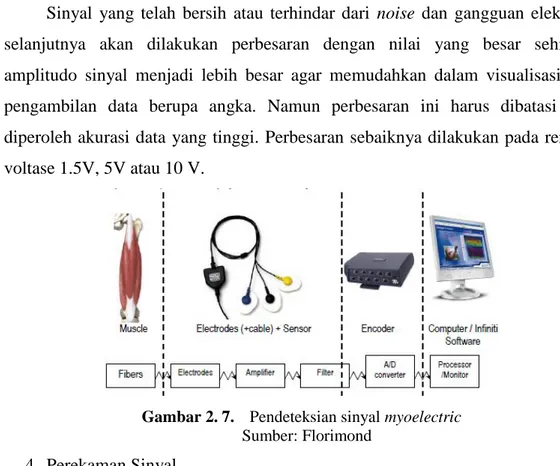
Sinyal yang telah bersih atau terhindar dari noise dan gangguan elektrikal selanjutnya akan dilakukan perbesaran dengan nilai yang besar sehingga amplitudo sinyal menjadi lebih besar agar memudahkan dalam visualisasi atau pengambilan data berupa angka. Namun perbesaran ini harus dibatasi agar diperoleh akurasi data yang tinggi. Perbesaran sebaiknya dilakukan pada rentang voltase 1.5V, 5V atau 10 V.
Gambar 2. 7. Pendeteksian sinyal myoelectric Sumber: Florimond
4. Perekaman Sinyal
Beberapa alat digunakan untuk menampilkan dan menyimpan data sinyal yang telah ditangkap. Oscilloschope dapat digunakan untuk menampilkan sinyal dengan amplitudo berdasarkan domain waktu. Analog to Digital Converter (ADC) mampu memunculkan amplitudo dalam angka. Setiap angka menunjukkan amplitudo sinyal pada waktu dan gerakan tertentu.
II-7 2.1.8. Pemrosesan Data Sinyal
Surface Electromyograpgy (SEMG) mengkaji sinyal melalui dua domain yaitu sinyal berdasarkan domain waktu (temporal domain) dan sinyal berdasarkan domain frekuensi (spectral domain).
Spectral domain, karakter sinyal ditentukan berdasarkan densitas kekuatan spektrum sinyal. Menggunakan Fast Fourier Transformation (FFT) sinyal berupa temporal domain diubah ke dalam sinyal berupa spectral domain. Sinyal ditampilkan dalam bentuk grafik yang kontinyu.
2.1.9. Parameter Sinyal Myoelectric Berbasis Frekuensi
Beberapa parameter sinyal mioelektrik yang dapat digunakan untuk menganalisis sinyal mioelektrik (Phinyomark, 2012):
1. Mean Frequency (MNF)
MNF adalah total dari kekuatan sinyal dikali dengan frekuensi lalu dibagi dengan total kekuatan sinyal mioelektrik. Dengan rumus sebagai berikut:
∑ ∑
⁄ ...
Dengan M adalah panjang frekuensi
fj adalah frekuensi dari spectrum pada frekuensi j Pj adalah kekuatan sinyal pada frekuensi j
2. Median Frequency (MDF)
MDF adalah frekuensi yang membagi spectrum menjadi dua bagian dengan emplitude yang sama
∑ ...
Dengan M adalah panjang frekuensi
Pj adalah kekuatan sinyal pada frekuensi j 3. Peak Frequency (PKF)
PKF adalah frekuensi pada maksimum power dari sinyal mioelektrik. Dengan rumus sebagai berikut:
( ) ... Dengan M adalah panjang frekuensi
(1)
(2)
II-8
Pj adalah kekuatan sinyal pada frekuensi j 4. Mean Power (MNP)
MNP adalah rata-rata dari kekuatan sinyal mioelektrik, dinyatakan dengan rumus:
∑ ⁄ ... Dengan M adalah panjang frekuensi
Pj adalah kekuatan sinyal pada frekuensi j 5. Total Power (TTP)
Total power didefinisikan sebagai total agregar dari kekuatan sinyal. Dinyatakan dengan rumus:
∑ ... Dengan M adalah panjang frekuensi
Pj adalah kekuatan sinyal pada frekuensi j 6. Spectral Pattern (SM)
Spectral moment adalah alternative analisis statikal untuk mengekstraksi kekuatan sinyal mioelektrik. Terdapat 3 bentuk spectral moment (SM) yakni spectral moment 1 (SM 1), Spectral Moment 2 (SM 2) dan spectral moment 3 (SM 3) dengan masing-masing rumus sebagai berikut:
∑ ...
∑ ...
∑ ... Dengan M adalah panjang frekuensi
fj adalah frekuensi dari spectrum pada frekuensi j Pj adalah kekuatan sinyal pada frekuensi j
Tidak semua parameter digunakan dalam penelitian terkait electromyography atau penangkapan sinyal myoelectric. Penggunaan parameter ini disesuaikan dengan tujuan dilakukannya penelitian. Pada penelitian ini parameter yang digunakan merupakan dan total power karena kedua parameter ini berkaitan dengan jelas terhadap kekuatan sinyal myoelectric.
(4)
(5)
(6) (7) (8)
II-9 2.2. TRUE RTA
True RTA merupakan kombinasi dari tiga komponene yaitu Real-time Analyzer (RA), Sound Analyzer (SA), dan Environmental Alayzer (EA). Terdapat dua sistem utama pada software ini yaitu measurement system dan analyze system. Komponenen real-time analyzer dan environmental analyzer termasuk kedalam measurement system, sedangkan komponenen sound analyzer masuk kedalam analyze system.
Komponen RA memiliki tool seperti peak level meter, signal generator, power spectrum octave analysis, 1/3 octave analysis, noise meter, 3D graph, oscilloscope, distortion measurement, recorder, preset, corelation function, impulse response, dan running ACF measurement. Komponen EA menyediakan tool antara lain automatic measurement by the time specification, automatic measurement by sound level specification, dan noise source identiication. Komponene SA memiliki tool antara lain impulse response analysis, running ACF analysis, dan envirronmental noise analysis.
2.2.1 True RTA Main Window
Tampilan awal software True RTA menampilkan tombol (button/tools) yang dapat diakses dan disesuaikan dengan kebutuhan pengguna.
Fitur-fitur utama software True RTA yaitu Signal Generator, FFT Analyzer, Oscilloscope, THD Analyzer, Impulse Response, Running ACF, Recorder, dan Preset. Fitur-fitur ini disebut sebagai button. Berikut ini deskripsi singkat dari button pada software True RTA:
Gambar 2. 8. TRUE RTA Main Window Sumber: ymec.com 1. Signal Generator
Signal generator menghasilkan sinyal tone, noise, sweep, dan pulse sebagai sinyal stereo. Sinyal pulse dihasilkan dengan waktu, durasi, dan interval yang spesifik. sinyal noise dapat ditampilkan dalam warna yang berbeda. Sweep adalah sinyal yang memiliki frekuensi yang berubah-ubah terus menerus. Sinyal tone
II-10
dapat ditampilkan dalam bentuk sinusoidal, triangle, square, dan saw-tooth wave. Setiap sinyal dapat diatur dalam frekuensi yang berbeda-beda.
2. FFT Analyzer
FFT analyzer mampu melakukan menampilkan sinyal pada bentuk spektral dengan rentang 1 – 1/24 octaf band. Sinyal juga dapat ditampikan dalam bentuk 3D.
3. Oscilloscope
Oscilloscope Merupakan oscilloscope dalam bentuk digital yang disediakan dalam software. Oscilloscope dalam software ini memiliki tampilan dan fungsi yang hampor sama dengan oscilloscope dalam bentuk hardware.
4. THD Analyzer
Total Harmonic Distortion (THD) Analyzer merupakan fitur untuk mengukur distorsi dengan lebih dari 30 harmoni tersedia dalam software, juga terdapat pengukuran level sweep dan frekuensi sweep.
5. Impulse Response
Impulse response diukur secara otomatis oleh Maximum Length Sequnce (MLX) atau Time Stretched Pulse (TSP). Impuls dapat disimpan dalam format wav dan dapat diimpoert dalam sistem pengukuran lain.
6. Running ACF
Running Auto Correlation Function (ACF) merupakan metode analisis suara berdasarkan domain waktu. Suara dapat direkam lebih dari 30 detik dan disimpan dalam format wav serta dapat diputar kembali atau diimport.
7. Recorder
Perekam suara yang sesuai dengan fungsi analyzer. 8. Preset
Preset merupakan fitur untuk melakukan recovery seting real-time analyzer sehingga dapat digunakan untuk melakukan pengukuran yang presisi.
2.2.2 FFT Analyzer
FFT Analyzer merupakan fitur untuk mengukur suara secara langsung ( real-time). Jenis-jenis tool yang ada pada fitur ini yaitu power spectrum, octave analysis, waterfall display, correlation meter, phase meter, dan spectogram.
II-11
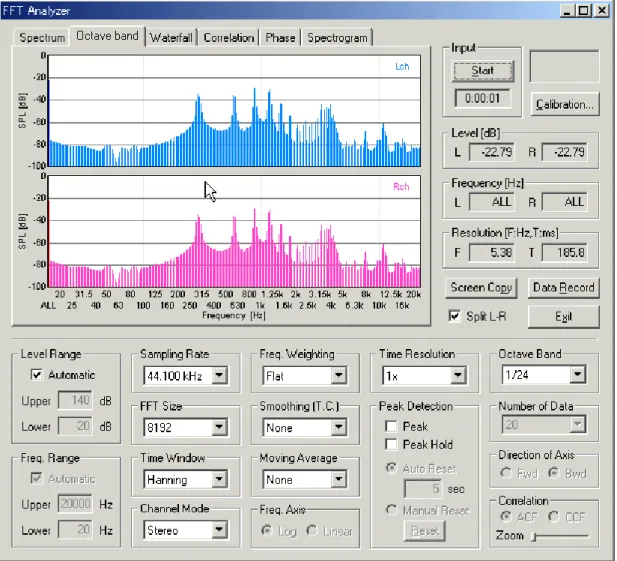
Gambar 2. 9. Jendela Utama FFT Analyzer Sumber: ymec.com
Power spectrum, mengukur power spectrum dari sinyal input. Sound level ditampilkan sebagai fungsi dari frekuensi. Octave band analysis menampilkan enegri pada oktaf pada waktu tersebut. Oktaf yang bada pada software antara lain 1/1, 1/3, 1/6, 1/12, dan 1/24. Waterfall menunjukkan waktu, energi, dan frekuensi yang dihasilkan dan ditampilkan pada grafik 3 dimensi. Spectogram menunjukkan energi pada saat frekeunsi dan waktu yang ditunjukkan pada diagram 2 dimensi dengan warna yang berbeda. Gambar 2.9 menunjukkan tampilan jendela utama fitur FFT Analyzer. Berrikut ini deskripsi fungsi pada gambar 2.9:
1. Input
Pengukuran dimulai saat tombol start ditekan. Panjang waktu pengukuran ditampilkan pada bagian ini.
II-12 Kalibrasi microfon dan data yang direkam 3. Level
Menampilkan level puncak atau level tertinggi dalam satuan desibel (dB). 4. Frequency
Menampilkan frekuensi tertinggi dalam satuan Hertz (Hz). 5. Resolution
Menampilkan resolusi waktu dan resolusi frekuensi. 6. Split L-R
Membagi tampilan menjadi 1 atau 2 tampilan pada jendela. 7. Exit
Berhenti atau selesai menggunakan FFT Analyzer. 8. Level Range
Mengatur rentang tekanan suara (aksis vertikal). 9. Frequency Range
Mengatur rentang frekuensi terbaca pada jendela (aksis horisontal) 10. Sampling Rate
Set up rasio sampel pada peubah analog/digital. 11. FFT Size
Blok ukuran FFT yang dapat diubah dengan rentang 1024 hingga 65536. 12. Time Window
Mengurangi frekuensi berlebih. 13. Frequency Weighting
Memilih pembobotan frekuensi. 14. Channel Mode
Memilih channel pengukuran apakah mono, stereo, left only, right only, atau differ.
15. Frequency Axis
Melakukan seting pada aksis frekuensi. 16. Time Resolution
Mengatur kecepatan FFT Analyzer dalam menampilkan output. 17. Moving Average
II-13 2.3. TANGAN MANUSIA
Tangan merupakan bagian atas tubuh manusia yang berfungsi sebagai alat gerak atau anggota gerak atas. Pada manusia normal terdapat sepasang tangan (tangan kanan dan tangan kiri). Anggota gerak atas pada manusia normal terdiri dari shoulder gridle, Arm (lengan atas), Forearm (lengan bawah), Wrist (pergelangan tangan), Palm of Hand (telapak tangan), Finger (jari tangan) (Rohen, 2011). Tangan manusia normal dan utuh terdiri dari lengan atas, lengan bawah, pergelangan tangan, telapak tangan, dan jari-jari tangan pada bagian ujungnya. Disamping itu tangan juga berfungsi sebagai penyeimbang tubuh dan merupakan alat dalam melakukan aktivitas sehari-hari.
Gambar 2. 10. Struktur tulang anggota gerak atas pada tangan manusia Sumber: J. Rohen A. Shoulder Gridle B. Arm C. Forearm D. Wrist E. Palm of Hand F. Finger 1. Scapula 2. Clavicle 3. Sternum 4. Humerus 5. Radius 6. Ulna 7. Carpal bone 8. Metacarpal bone 9. Phalanges
II-14
Gambar 2.10 menjelaskan tulang-tulang yang menyusun anggota gerak atas pada manusia. Terdapat scapula atau tulang belikat yang terletak pada bagian atas punggung manusia. Pada ujung dada, terdapat clavicle atau tulang selangka. Ujung tulang selangka bertemu dengan sternum atau tulang dada. Terdapat satu tulang besar pada lengan atas manusia yaitu humerus. Lengan bawah terdiri dari dua tulang yaitu radius dan ulna (tulang hasta). Telapak tangan disusun dari tulang carpal. Sedangkan jari-jari tangan terdiri dari tulang metacarpal dan phalanges.
2.3.1 Anatomi Tangan
Telapak tangan manusia terdiri dari tulang kecil yaitu carpal, metacarpal, dan phalangeal. Tulang-tulang yang menyusun telapak tangan yaitu tulang carpal dan tulang metacarpal. Tulang carpal disusun oleh tulang-tulang yang lebih kecil yaitu tulang lunate, triquteral, capitate, scapoid, trapezoid, trapezium. Sedangkan jari disusun oleh tiga tulang yaitu proximal phalanx, middle phalanx, dan distal phalanx. metacarpal merupakan tulang penyusun pada keempat jari yaitu jari kelingking, jari manis, jari tengah, dan jari telunjuk. Ibu jari disusun oleh tulang metacarpal of thumb. Ulna dan radius merupakan penghubung antara lengan dan telapak tangan, kedua tulang ini terletak pada pergelangan tangan seperti dijelaskan pada gambar 2.11
Gambar 2. 11. Struktur tulang pada tangan manusia Sumber: imagekb.com
II-15
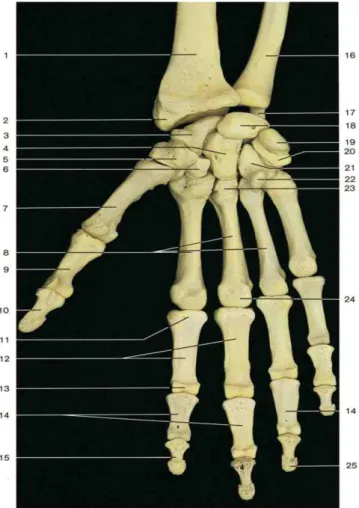
Berdasarkan hasil penyinaran dengan sinar-X, bagian pada ibu jari mencakup dua ruas jari, satu tulang telapak tangan, trapezium dan schapoid yang mempunyai garis lintang yang paling besar dan menghubungkan ke segala digit yang lain. Tiga sambungan yang disebut trapziometacarpal (TM) joint, metacarpophalanxal (MP), dan interphalaxal (IP) joint, antara segmen yang bertulang merupakan penyebab ibu jari untuk bergerak bebas dalam arah tiga dimensi. Gambar 2.12 menunjukan tulang-tulang yang menyusun telapak tangan dan pergelangan tangan kanan yang mengacu pada telapak tangan (palmar aspect)
Gambar 2. 12. Tulang pada telapak tangan dan pergelangan tangan kanan (palmar aspect)
Sumber: J. Rohen
Bagian-bagian tulang pergelangan tangan dan telapak tangan secara lengkap pada gambar 2.3 dijelaskan dibawah ini:
1. Radius
2. Styloid process of radius 3. Schapoid bone
II-16 4. Capitate bone
5. Trapezium 6. Trapezoid bone 7. First metacarpal bone
8. Second of the fourth metacarpal bone 9. Proximal phalanx of thumb
10. Distal phalanx of thumb
11. Base of second proximal phalanx 12. Proximal phalanges
13. Head of second proximal phalanx 14. Middle phalanges
15. Distal phalanx 16. Ulna
17. Styloid process of ulna 18. Lunate bone
19. Pisiform bone 20. Triquetral bone 21. Hamate bone
22. Hamulus or hook of hamate bone 23. Base of third metacarpal bone 24. Head of metacarpal bone
2.4. OTOT TANGAN MANUSIA
Tangan manusia selain terdiri dari tulang tangan, juga terdiri dari banyak otot, dimana masing-masing otot ini bertanggung jawab atas gerakan tertentu pada tangan. Pada lengan tangan, otot terbagi dalam tiga lapisan yaitu superficial layer, intermediate layer, dan deep layer. Setiap lapisan terdiri dari otot yang berbeda, setiap otot memiliki fungsi masing-masing dalam menggerakan tangan, pergelangan tangan, maupun jari-jari tangan. Berdasarkan gerakan, otot pada tangan manusia terbagi menjadi dua yaitu otot fleksi (flexor) dan ekstensi (ekstensor).
II-17
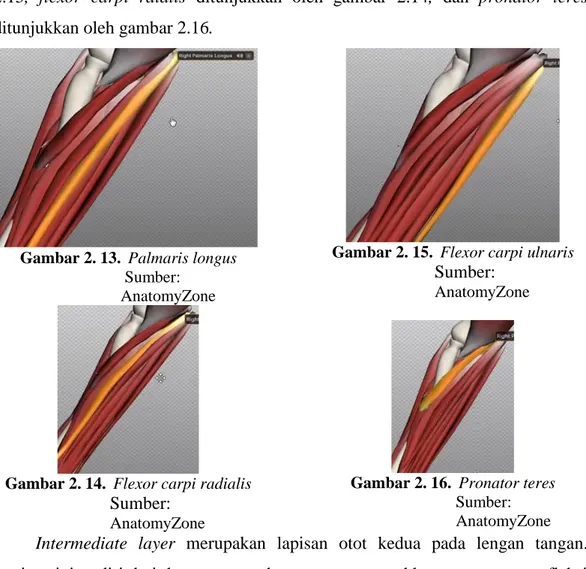
Fleksi adalah gerakan tangan untuk mendekatkan tangan ke tubuh sedangkan ekstensi merupakan gerakan menjauhkan tangan dari tubuh. Pembagian fungsi gerakan ini juga berlaku untuk otot pada lengan tangan. Terdapat otot yang berfungsi untuk melakukan gerakan fleksi dan ada otot yang berfungsi melakukan gerakan ekstensi. Lapisan otot pertama yang bertugas menggerakan tangan secara fleksi adalah superficialis layer. Superficialis layer merupakan lapisan otot pertama tangan dan terdiri dari empat otot antara lain plamaris longus ditunjukkan gambar 2.13, flexor carpi ulnaris ditunjukkan pada gambar 2.15, flexor carpi raialis ditunjukkan oleh gambar 2.14, dan pronator teres ditunjukkan oleh gambar 2.16.
Gambar 2. 13. Palmaris longus Sumber: AnatomyZone
Gambar 2. 14. Flexor carpi radialis
Sumber:
AnatomyZone
Gambar 2. 15. Flexor carpi ulnaris Sumber:
AnatomyZone
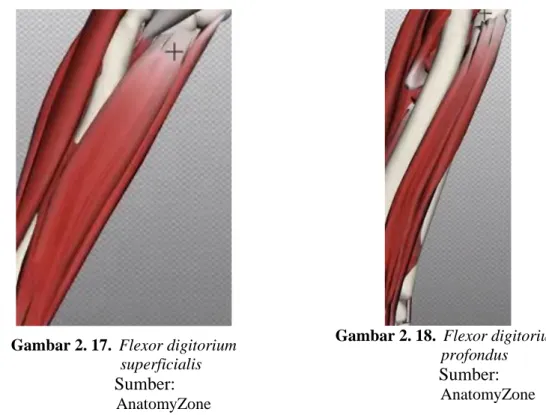
Gambar 2. 16. Pronator teres Sumber: AnatomyZone Intermediate layer merupakan lapisan otot kedua pada lengan tangan. Lapisan ini terdiri dari dua otot yang bertugas menggerakkan tangan secara fleksi yaitu otot flexor digitorium superficialis (gambar 2.17) dan otot flexor digitorium profondus (gambar 2.18). Otot-otot ini bertugas menggerakan jari-jari tangan.
II-18 Gambar 2. 17. Flexor digitorium
superficialis Sumber:
AnatomyZone
Gambar 2. 18. Flexor digitorium profondus
Sumber: AnatomyZone
Deep layer merupakan lapisan terdalam otot pada lengan tangan, untuk gerakan fleksi hanya terdapat satu otot yaitu pollicis longus. Otot ini bertugas untuk melakukan gerakan khusus pada ibu jari.
Gambar 2. 19. Policis longus
Sumber: AnatomyZone
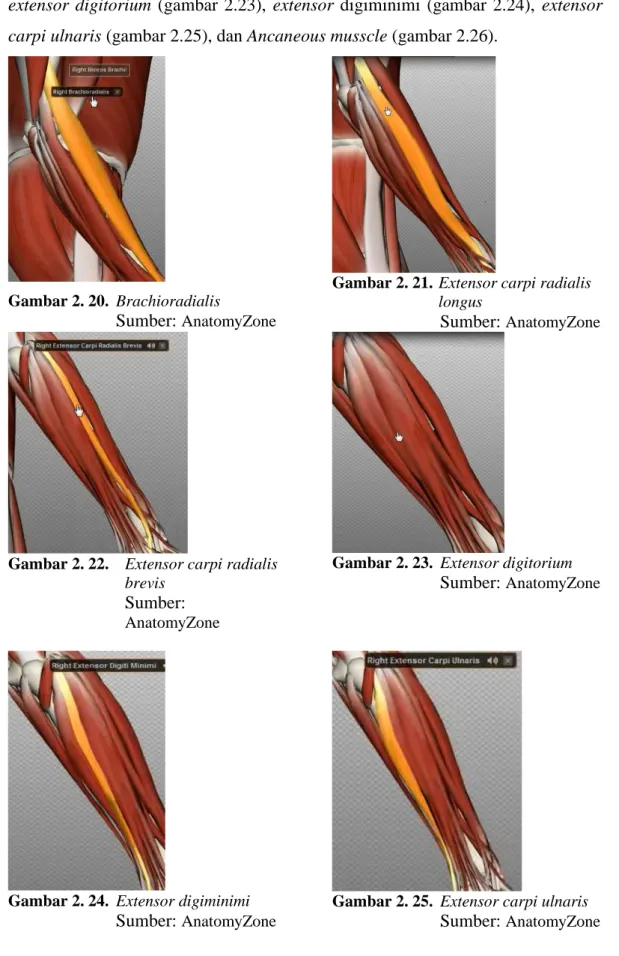
Otot pada lengan tangan berikutnya adalah otot yang bertugas untuk melakukan gerakan extensor (ekstensi). Ekstensi merupakan gerakan untuk menjauhkan tangan dari pusat tubuh. Otot lengan tangan terbagi dalam dua lapisan yaitu superficialis layer dan deep layer. Jumlah otot pada setiap lapisan untuk gerakan fleksi dan ekstensi berbeda.Otot pada lapisan superficiale layer untuk gerakan ekstensi tersusun dari otot brachioradialis (gambar 2.20) , extensor carpi radialis longus (gambar 2.21), extensor carpi radialis brevis (gambar 2.22),
II-19
extensor digitorium (gambar 2.23), extensor digiminimi (gambar 2.24), extensor carpi ulnaris (gambar 2.25), dan Ancaneous musscle (gambar 2.26).
Gambar 2. 20. Brachioradialis
Sumber: AnatomyZone
Gambar 2. 21. Extensor carpi radialis longus
Sumber: AnatomyZone
Gambar 2. 22. Extensor carpi radialis brevis
Sumber: AnatomyZone
Gambar 2. 23. Extensor digitorium Sumber: AnatomyZone
Gambar 2. 24. Extensor digiminimi Sumber: AnatomyZone
Gambar 2. 25. Extensor carpi ulnaris Sumber: AnatomyZone
II-20
Gambar 2. 26. Anconeous muscle Sumber: AnatomyZone
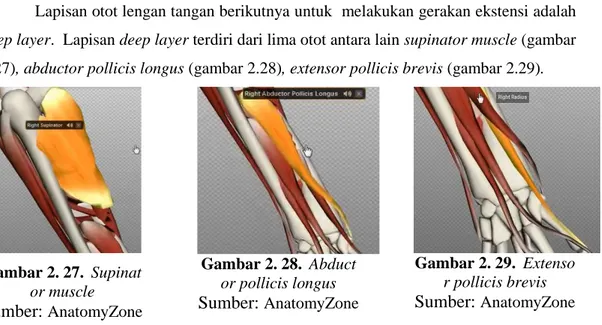
Lapisan otot lengan tangan berikutnya untuk melakukan gerakan ekstensi adalah deep layer. Lapisan deep layer terdiri dari lima otot antara lain supinator muscle (gambar 2.27), abductor pollicis longus (gambar 2.28), extensor pollicis brevis (gambar 2.29).
Gambar 2. 27. Supinat or muscle Sumber: AnatomyZone Gambar 2. 28. Abduct or pollicis longus Sumber: AnatomyZone Gambar 2. 29. Extenso r pollicis brevis Sumber: AnatomyZone
Otot berikutnya pada deep layeri yaitu extensor pollicis longus (gambar 2.30), dan extensor indicis (gambar 2.31).
Gambar 2. 30. Extensor pollicis longus Sumber: AnatomyZone
Gambar 2. 31. Extensor indicis
Sumber: AnatomyZone
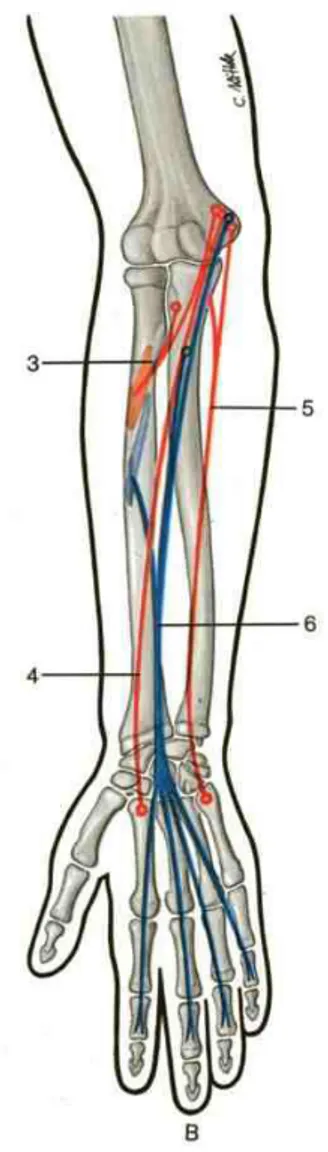
Gambar skematik otot untuk gerakan fleksi pada lengan tangan manusia ditampilkan untuk mempermudah pembacaan otot. Gambar 2.32 merupakan gambar skematik pada superficialis layer dan gambar 2.33 merupakan gambar skematik pada deep layer.
II-21 Gambar 2. 32. Schematic drawing
superficialis layer (flexor) Sumber: J. Rohen
Gambar 2. 33. Schematic drawing deep layer (flexor)
Sumber: J. Rohen Schematic drawing superficialis layer dan schematic drawing deep layer menunjukkan bagian-bagian berikut ini:
Gambar skematik otot untuk gerakan ekstensi pada lengan tangan manusia ditampilkan untuk mempermudah pembacaan otot. Gambar 2.25 merupakan gambar skematik pada superficialis layer dan gambar 2.26 merupakan gambar skematik pada deep layer.
Bagian A:
1. Flexor pollicis longus muscle (red)
2. Flexor digitorium profondus muscle (blue)
Bagian B:
3. Pronator teres muscle (red) 4. Flexor carpi radialis muscle (red) 5. Flexor carpi ulnaris muscle (red) 6. Flexor digitorium superficialis
II-22
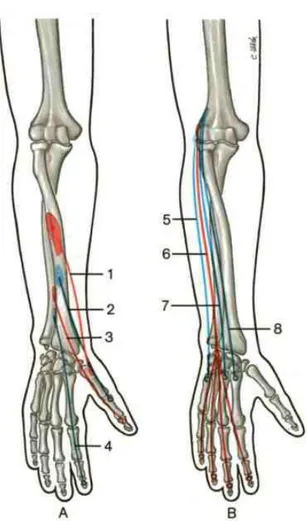
Gambar 2. 34. Posisi otot ekstensor pada lengan tangan (schematic drawing) Sumber: J. Rohen
Schematic drawing posisi otot ekstensor pada lengan tangan menjelaskan bagian-bagian berikut ini:
2.5. GERAKAN DASAR TANGAN MANUSIA
Tangan manusia melakukan berbagai gerakan dalam kehidupan sehari-hari. Secara anatomis gerakan ini berupa fleksi, ekstensi, abduksi, adduksi, pronasi, supinasi, elevasi, depresi, medail rotation, lateral rotation dan lain-lain.
Bagian A:
1. Abductor pollicis longus muscle (red)
2. Extensor pollicis brevis muscle (blue)
3. Extensor pollicis longus muscle (red)
4. Extensor Indicis muscle (blue)
Bagian B:
5. Extensor carpi ulnaris muscle (blue)
6. Extensor digitorium muscle (red)
7. Extensor carpi radialis brevis muscle (blue)
8. Extensor carpi radialis longus (blue)
II-23
Fleksi merupakan gerakan tangan untuk mendekatkan pada tubuh, namun untuk gerakan fleksi pada pergelangan tangan merupakan gerakan tangan untuk mendekatkan telapak tangan pada sisi dalam lengan tangan atau radius menurut aspeh planar. Ekstensi merupakan gerakan tangan untuk menjauhkan tangan dari pusat tubuh menurut aspek planar. Ekstensi pada pergelangan tangan berfungsi untuk menjauhkan tangan ke arah luar lengan tangan. Gerakan fleksi dan ekstensi ditunjukkan pada gambar 2.35. Pronasi dan Supinasi ditunjukkan pada gambar 2.36.
Gambar 2. 35. Gerakan fleksi dan ekstensi tangan
Gambar 2. 36. Gerakan pronasi dan supinasi Sumber: morphopedics.wikidot.com
Tangan manusia memiliki enam gerakan dasar penggenggaman yaitu cylindrical, lateral, palmar, hook, tip, dan spherical (Fukaya & Toyama, 2000). 1. Gerakan Cylindrical
Gerakan cylindrical merupakan gerakan penggenggaman dimana benda kerja berada pada pusat antara jari-jari. Ibu jari menahan benda kerja. Pada umumnya gerakan penggenggaman ini berfungsi untuk mencekam benda kerja yang berbentuk silindris. Kelima jari tangan saling berpengaruh dalam menahan benda kerja dimana tulang jari yang terlibat phalanx proximalis, phalanx media, dan phalanx distalis. Gambar 2.37 menunjukan cylindrical grasp.
II-24
Gambar 2. 37. Model gerakan cylindrical Sumber: Fukaya & Toyama 2. Gerakan Lateral
Gerakan lateral merupakan gerakan penggenggaman dimana benda kerja dijepit oleh ibu jari dan bagian samping dari telunjuk jari, jari telunjuk dan ibu jari mengarah kedepan sedangkan tiga jari lain mengarah kebelakang. Ibu jari dan telunjuk jari memiliki peranan terpenting dalam penggenggaman ini. Pada jari telunjuk tulang middle phalanx dan distal phalanx berfungsi sebagai sisi penjepit benda kerja. Gambar 2.38 menunjukkan lateral grasp.
Gambar 2. 38. Model gerakan lateral Sumber: Fukaya & Toyama 3. Gerakan Palmar
Gerakan palmar pada dasarnya hamper sama dengan gerakan lateral, hanya saja seluruh jari mengarah ke tengah. Tulang jari telunjuk dan ibu jari phalanx distalis menjepit benda kerja diantara keduanya.
Gambar 2. 39. Model gerakan palmar Sumber: Fukaya & Toyama
II-25 4. Gerakan Hook
Gerakan hook merupakan gerakan menahan benda kerja dengan menggunakan jari telunjuk, jari tengah, jari manis, dan jari kelingking saat penggenggaman. Pada umumnya beban atau benda kerja diangkat secara vertical. Tulang jari yang berperan penting dalam gerakan ini adalah phalanx proximal, phalanx media, dan phalanx distal.
Gambar 2. 40. Model gerakan hook Sumber: Fukaya & Toyama 5. Gerakan Tip
Gerakan tip pada dasarnya sama dengan gerakan palmar, hanya saja benda kerja ditahan menggunakan ujung jari telunjuk dan ujung ibu jari.
Gambar 2. 41. Model gerakan Tip
Sumber: Fukaya & Toyama 6. Gerakan Spherical
Gerakan spherical merupakan gerakan penggenggaman dengan tujuan pemegangan benda kerja berbentuk bola. Pada tipe penggenggaman ini semua jari terlibat dalam menahan benda agar tidak lepas atau terjatuh. Seluruh tulang jari phalanx middle, phalanx distal, dan phalanx proximal.
Gambar 2. 42. Model gerakan spherical Sumber: Fukaya & Toyama
II-26 2.6. PROSTHETIC HAND
Prosthetic hand merupakan tangan palsu atau tangan buatan yang berfungsi untuk menggantikan tangan yang mengalami amputasi. Tujuan dibuatnya tangan ini adalah sebagai pelengkap penampilan seseorang yang menglami amputasi. Prosthetic hand mengalami perkembangan yang lebih jauh, tidak hanya sebagai pelengkap penampilan, prosthetic hand memiliki fungsi yang semakin mendekati tangan yang sebenarnya. Prosthetic hand terbagi dalam tiga jenis menurut kendali dalam menggerakannya yaitu body powered prosthetic hand, myoelectric prosthetic hand, dan brain control inervation.
Prosthetic hand dengan sinyal myoelectric sebagai kendali mulai muncul pada tahun 1940, namun tidak dapat dikembangkan karena alasan keterbatasan teknologi. Unions of Soviet Socialist Republics mulai mengembangkan dan mengenalkan kembali prosthetic hand (Korbinski dkk, 1960). Mulai tahun 1960 penelitian tentang myoelectric prosthetic hand banyak dilakukan di berbagai negara. Pada tahun 1969, Jepang mengembangkan myoelectric prosthetic hand dengan banyak fungsi (Kato dkk, 1969). Amerika Serikat untuk pertama kalinya mengembangkan siku prostetik dengan penggerak sinyal myoelectric pada tahun 1970-an (Lyman dkk, 1976). Memasuki abad dua puluh perusahaan-perusahaan tangan prostetik seperti Otto Bock, Inc, Shanghai Kesheng, dan Touch Bionic mulai melakukan penelitian mendalam. Prosthetic hand ini dikendalikan atau digerakan dengan memanfaatkan sinyal myoelectric yang dihasilkan dari otot tangan yang tersisa (residual muscle) dari hasil amputasi. Perusahaan-perusahaan tersebut mampu membuat tangan myoelectric namun biaya yang ditimbulkan sangat besar.
2.6.1. Body-Powered Prosthetic Hand
Body-powered prosthetic hand memanfaatkan sistem transmisi kabel/tali dalam gerakannya. Kabel melingkar dari ujung lengan prostetik melingkari bahu, kemudian ujung kabel yang lain terikat pada lengan atau tangan normal. Pada umumnya penggeraknya memanfaatkan gerakan abduksi pada pundak atau gerakan fleksi pada pergelangan tangan. Dua tipe gerakan yang digunakan adalah Voluntary Open (VO) dan Voluntary Close (VC). VO, dimana tangan akan membuka saat kabel mengalami tarikan, dan tangan akan menutup dengan
II-27
sendirinya saat kabel tidak ditarik. VC, dimana tangan membuka dalam keadaan awal, dan akan menutup saat kabel mengalami tarikan. Body-powered prosthetic hand banyak digunakan pada tangan prostetik hook dan kosmetik. Prosthetic hand ini banyak dikembangkan pada saat awal kemunculannya.
Gambar 2. 43. Body-powered prosthetic hand Sumber: www.wbcl.com 2.6.2. Myoelectric Prosthetic Hand
Myoelectric prosthetic hand adalah bagian tubuh buatan yang dikendalikan dengan memanfaatkan sinyal-sinyal listrrik yang berasal dari kontraksi otot. Sinyal ini secara alami dihasilkan oleh tubuh manusia. Pada bagian tangan, sinyal ini dapat ditemukan pada lengan, pergelangan tangan, atau siku. Sinyal myoelectric pada seseorang yang mengalami amputasi dapat diambil dari bagian tubuh yang tersisa (residual muscle).
Gambar 2. 44. Myoelectric prosthetic hand
Sumber: http://scifi2scifab.media.mit.edu
Keunggulan myoelectric prosthetic hand ini adalah biaya pembuatan yang rendah, bobot yang ringan dan sistem yang sederhana. Namun prosthetic hand ini juga memiliki kekurangan dimana dibutuhkan besaran listrik minimal untuk menggerakan motor pada tangan, sedangkan sinyal myoelectric yang dihasilkan
II-28
tubuh tidak menghasilkan daya yang cukup untuk menggerakan motor. Selain itu dibutuhkan peletakan elektroda yang tepat agar didapat sinyal myoelectric terkuat yang dihasilkan otot.
2.6.3. Brain Control Inervation Prosthetic Hand
Brain control prosthetic hand merupakan prosthetic hand dimana gerakkan yang diambil berasal dari sinyal-sinyal yang berasal dari otak. Dikenal juga dengan neuro prosthetis. Inti dari gerakan prostetik ini bergantung pada pendeteksian dan pengolahan aktivitas otak dalam perencanaan dan pelaksanaan gerakan (Qurioga & Panzeri, 2009)
Gambar 2. 45. Brain control prosthetic hand Sumber: www.egr.uh.edu
2.7. PERKEMBANGAN PROSTHETIC HAND
Perkembangan prosthetic hand saat ini sangat cepat, awalnya hanya tersedia prosthetic hand dengan fungsi sederhana hanya sebagai pelengkap. Saat ini berkembang dengan sangat kompleks baik dari segi desain, mekanisme, maupun fungsinya. Bahkan kendali prosthetic hand saat ini melibatkan teknologi canggih dan saraf manusia.
2.7.1. Common Prosthetic Hand
Terdapat prosthetic hand yang sangat sederhana dengan mekanisme gerakan hanya membuka dan menutup. Tangan ini sangat terbatas dalam fungsinya. Tujuan penggunaan tangan ini adalah untuk kosmetik atau pelengkap pada bagian tubuh yang hilang.
II-29
Gambar 2. 46. VASI hand family
Sumber: Technologies, Liberting
Gambar 2. 47. Mech hand
Sumber: Technologies, Libertieng 2.7.2. BeBionic dan Tangan iLimb
BeBionic prosthetic hand merupakan terobosan baru dalam dunia prosthetic hand dengan peningkatan fungsi dan fleksibilitas yang jauh apabila dibandingkan dengan prosthetic hand yang ada pada umumnya. Sinyal myoelectric yang ditangkap dari otot memiliki besaran jumlah daya listrik yang cukup dan hampir proporsional menjadikan tangan mampu bergerak dengan mekanisme yang smooth Pada setiap jari terdapat motor dan susunan gear sehingga setiap jari hampir memiliki derajat kebebasan mendekati tangan normal.
Gambar 2. 48. Tangan bebionic
Sumber: Advanced Arm Dynamic
iLimb prosthetic hand pada dasarnya hampir sama dengan tangan BeBionic, yang membedakan kedua tangan ini adalah pada iLimb prosthetic hand mekanisme ibu jari digerakan secara manual sesuai keinginan pengguna.
II-30
Gambar 2. 49. iLimb hand
Sumber: Arthur Finneston+Orthotics 2.7.3. Tangan MicheLangelo
Tangan Michealngelo diciptakan oleh Advanced Arm Dynamic dan saat ini merupakan prosthetic hand tercanggih yang pernah ada. Mekanisme yang sangat komplek terdapat pada ibu jari, dimana pada tangan ini ibu jari dapat bergerak atau bertenaga. Tangan ini sangat halus dan efisien dalam melakukan eksekusi gerakan (Pittman, 2012).
2.8. INSTRUMENTASI PENANGKAPAN SINYAL MYOELECTRIC
Sinyal myoelectric dihasilkan oleh serat otot dimana sinyal ditangkap oleh elektroda, yang diperbesar dan difilter sebelum diubah menjadi sinyal digital oleh encoder. Sinyal ini akan dikirim ke komputer dan akan diproses, ditampilkan, serta direkam oleh software.
Sinyal myoelectric akan dideteksi dengan beberapa peralatan antara lain elektroda permukaan, Analog Device620, rangkaian analog device, Function Generator, Osciloscop, dan software untuk membaca dan menganalisis sinyal myoelektrik yang didapat.
2.8.1. Elektroda Permukaan
Elektroda permukaan merupakan alat yang berfungsi sebagai sensor sinyal myoelectric. Elektroda ini ditempel pada permukaan kulit yang diperkirakan memiliki sinyal myoelectric. Elektroda permukaan ini nantinya akan ditempelkan pada kulit yang orientasi peletakannya mempertimbangkan letak otot. Beberapa karakteristik yang harus dimiliki oleh elektroda permukaan yaitu elektroda harus bersifat non-polarizable sehingga tidak terjadi polarisasi pada saat deteksi sinyal myoelectric. Elektroda Ag/AgCl bersifat nontoxic, yang artinya tidak menghasilkan racun pada saat kontak dengan kulit. Lebih lanjut lagi, elektroda harus memiliki sifat adesif, artinya memiliki daya ikat yang bagus pada daerah
II-31
kontak sehingga tidak menyebab noise yang berjenis motion artifac (Fitriana, 2012).
Gambar 2. 50. Elektroda permukaan 2.8.2. Penguat Diferensial Instrumentasi AD620
Sinyal dideteksi oleh kedua input penguat diferensial. Kedua input ini telah disambungkan ke elektroda permukaan dan ditempelkan pada kulit. Jika terdapat perbedaan diantara kedua input sinyal tersebut maka perbedaan tersebut akan diperkuat, jika terdapat noise maka noise tersebut akan terdeteksi sama besarannya di kedua input penguat diferensial sehingga noise dapat dieliminasi (Fitriana, 2012).
Gambar 2. 51. Analog device 620
Sumber: AD620 Analog device
Penguat diferensial yang digunakan pada instrumentasi penangkap sinyal myoelectric yang dibanguan adalah AD620. AD620 adalah penguatan instrumentasi atau instrumentasi amplifier yang hanya membutuhkan satu buah resistor untuk mengatur penguatan sinyal. Hubungan besar resistor dengan besar penguat sinyal yang dihasilkan dapat dilihat pada gambar 2.46. Selain itu keuntungan memakai penguat diferensial AD620 adalah:
1. Tegangan offset DC sangat rendah 2. Low drift
3. Low noise
4. Open loop-gain sangat tinggi 5. CMRR sangat tinggi
II-32 6. Impedansi input sangat tinggi
Gambar 2. 52. Skema AD620
Sumber: AD620 Analog Device
Penguat diferensial AD620 memiliki delapan kaki gambar 2.46 dengan urutan berbentuk letter U dengan masing-masing sisi berjumlah 4 kaki. Keterangan dari kaki-kaki tersebut adalah sebagai berikut:
1. Pin 1 & 8: RG adalah untuk menentukan gain
2. Pin 7 : +Vs dihubungkan ke tegangan catu positif 3. Pin 4 : -Vs dihubungkan ke tegangan catu negatif
4. Pin 5 : REF dihubungkan ke tegangan referensi : pada mode split supply ke ground, pada mode dual supply ke pembagi tegangan yang terbuffer Pin 2 & 3: -IN dan +IN adalah tegangan masukan inverting dan non
inverting
2.8.3. Function Generator
Function Generator merupakan peralatan tes elektronik yang berfungsi untuk menghasilkan sinyal elektronik dalam frekuensi, amplitude, dan voltase (tegangan). Gelombang yang dihasilkan dapat diubah melalui beberapa bentuk yaitu, persegi, segitiga. Alat ini berfungsi seperti sumber sinyal. Frekuensi dalam alat ini dapat diatur dari tingkat terkecil 3Hz-50kHz. Selain itu amplitudo alat ini juga dapat diatur dari ukuran milivolt hingga volt.
Gambar 2. 53. Fucntion generator Sumber: www.tek.com 2.8.4. Oscilloscope
Oscilloscope merupakan alat untuk menampilkan grafik kalibrasi tegangan terhadap waktu, singkatnya oscilloscope memproyeksikan sinyal listrik agar dapat
II-33
terlihat. Inti dari oscilloscope berupa tabung laser katode (cathode ray tube/CRT). Sebuah oscilloscope memiliki satu display layar pada sisi kiri, sedangkan pada sisi kanan berisi tombol untuk melakukan set up pada oscilloscope. Tombol set up ini merupakan kontrol pada oscilloscope yaitu CRT system control, vertical control system, horizontal control system dan trigger system control. Vertical control system berfungsi untuk mengatur posisi sinyal yang ditampilkan baik mengatur dalam posisi vertikal. Horizontal control system mengatur tampilan sinyal dalam aksis horizontal. Trigger system control berfungsi untuk mengatur keadaan sinyal.
Gambar 2. 54. Oscilloscope 2.8.5. Noise dan Artefak
Sinyal myoelectric memiliki besaran dalam ukuran milivolt. Sinyal ini sangat kecil sehingga sangat rentan terhadap gangguan berupa sinyal dari lingkungan. Terdapat beberapa sinyal yang menjadi gangguan saat pendeteksian sinyal myoelectric.
1. Interfering power hum, nois ini dihasilkan oleh ground yang terdapat pada lingkungan. Nois ini berkisar pada frekuensi 60/60Hz. Noise jenis ini sering muncul meskipun elektroda telah diletakan dengan baik pada permukaan kulit. Langkah paling mudah untuk menanggulangi noise jenis ini adalah dengan mematikan atau menjauhkan peralatan dengan motor dan jauhkan dari sumber aliran listrik bertegangan tinggi.
2. ECG Artifact, noise jenis ii dihasilkan oleh detak jantung. Noise jenis ini banya terdeteksi pada bagian jantung dan pembuluh darah yang mengalirkan darah dari jantung karena kekuatan detak jantung yang sangat kuat. Noise ini tidak dapat dihindari namun bisa direduksi dengan peletakan elektroda yang baik serta menjauhkan penempelan elektroda dari jantung.
II-34
3. Movement artifact, noise jenis ini muncul karena peletakan elektroda yang kurang tepat sehingga saat subjek melakukan gerakan tertentu elektroda bergerak, gerakan ini mengakibatkan noise muncul dan terdeteksi oleh elektroda.
2.9. ARDUINO
Arduino merupakan kesatuan antara microcontroller dan komponen elektronik berukuran kecil pada sebuah papan circuit yang dapat dihubungkan dengan komputer melalui USB. Microcontroller onbard ini memiliki socket penghubung dan dengan menggunakan kabel, microcontroller ini dapat dihubungkan dengan peralatan elektronik lain seperti motor, relay, sensor cahaya, dioda laser, loudspeaker, microfon dll (Monk, 2010). Arduino juga merupakan sistem komputer kecil yang dapat diprogram dengan berbagai macam perintah atau input dan output (Boxall, 2013).
Arduino memiliki beberapa jenis (family) dengan kemampuan prosesor yang berbeda-beda, namun pada dasarnya arduino berfungsi sebagai microcontroller. Jenis-jenis arduino antara lain Arduino Uno, Freetronics Eleven, Freeduino, Boarduino, Arduino Nano, Arduino Lylypad, Arduino Mega 2560, Freetronics EtherMega, dan Arduino Due.
2.9.1. Arduino Due dan Bagia-Bagiannya
Arduino due digunakan dalam penelitian ini. Arduino due memiliki sebuah prosesor dengan kapasitas 84MHz yang membuatnya mampu membaca dan merunning program dengan sangat cepat. Arduino due memiliki memory 16x lebih banyak dari jenis arduino yang lain sehingga intruksi yang kompleks dapat dibuat dan dirunning.
Gambar 2. 55. Arduino Due
II-35
Arduino ataupun arduino due terdiri dari beberapa perangkat elektronik seperti terlihat pada gambar 2.55. perangkat elektronik akan dijelaskan pada bagaian dibawah ini:
1. USB dan Power
Sisi kiri merupakan USB yang memiliki tiga fungsi yaitu untuk menghubungkan dengan PC, mensuplai daya untuk arduino, dan untuk memprogram atau memberikan instruksi pada arduino due. Sisi kanan merupakan penghubung daya. Jadi daya dapat diberikan pada arduino dengan dua cara yaitu melalui USB atau dengan menghubungkan penghubung daya dengan sumber listrik, baik adaptor maupun power bank.
Gambar 2. 56. USB dan Penghubung Daya Sumber: Arduino Workshop 2. Microcontroller
Microcontroller merupakan otak dari arduino. Microcontroller merupakan komputer berukuran kecil yang terdiri dari prosesor untuk mengeksekusi atau menjalankan instruksi yang diberikan. Didalamnya juga terdapat memory yang berfungsi untuk menyimpan data dari sketc yang dibuat. Microcontroller juga bertugas menerima dan menyampaikan instruksi yang diberikan sesuai sketc yang dibuat kepada aktuator.
Gambar 2. 57. Microcontroller
II-36 3. Power dan Soket Analog
Power merupakan daya yang dapat diterima dan disuplai arduino. Terdapat dua daya yang dapat diterima arduino yaitu 3.3Volt dan 5 Volt. Jika daya yang diberikan ke arduino melebihi batasan ini dapat mengakibatkan rusaknya arduino. Bagian analog input terdapat enam soket dari A0-A5. Analog input menerima sinyal elektrik dalam volt.
Gambar 2. 58. Power dan Analog Input Sumber: Arduino Worksop 4. Pin untuk Digital input/Output
Terdapat empat belas pin yaitu digital 0-13. Pin ini mampu membaca dan menyalurkan instruksi berupi sinyal elektrik yang dihasilkan atau diberikan. Khusus untuk pin 0 dan pin 1 mampu menerima dan menyalurkan data ke perangkat elektronik lain. Sedangkan input dengan simbol tilde (~) mampu menghasilkan sinyal yang bervariasi.
Gambar 2. 59. Digital input dan output Sumber: Arduino Workshop 5. LED pada Papan Arduino
LED pada simbol Tx dan Rx akan menyala apa bila ada instruksi yang diberikan atau di upload ke dalam arduino.
Gambar 2. 60. LED
II-37 6. Tombol Reset
Tombol reset adalah tombol untuk mengulang kembali instruksi yang diberikan, tombol ini digunakan apabila terjadi eror saat menjalankan program.
Gambar 2. 61. Tombol Reset
Sumber: Arduino Workshop 2.9.2. Integrated Development Environment (IDE)
Integrated Development Environment (IDE) merupakan software untuk memberikan instruksi kepada hardware untuk melakukan sesuatu dan bagaimana cara melakukannya. IDE terbagi dalam tiga area utama area perintah (command area), area teks (text area), dan area jendela pesan (message window area). Bagian lain dari IDE merupakan pendukung dalam pembuatan program pada arduino.
Gambar 2. 62. Iintegrated Development Environmet Sumber: Arduino Workshop
II-38
Penjelasan mengenai area arduino akan dideskripsikan sebagai berikut: 1. Command Area (Area Perintah)
Command area terletak pada bagian atas tampilan program IDE. Terdiri dari title bar, meni items, icon, serta judul program.
2. Text Area (Area Teks)
Text Area merupakan bagian kosong yang terletak dibawah command area, pada bagian ini berfungsi untuk melakukan pemrograman untuk memberikan instruksi yang ingin kita sampaikan pada hardware.
3. Message Window Area (Area Jendela Pesan)
Message Window Area terletak pada bagian paling bawah. Area ini menunjukkan apakah program mengalami eror atau tidak. Saat terjadi eror pada program akan di tunjukkan eror atau masalah yang terjadi dan harus ditangani pada instruksi program.
2.9.3. Algorithm Dasar untuk Pemrograman Arduino
Instruksi yang diberikan dalam IDE merupakan instruksi yang dibuat dengan bahasa pemrograman yang dikenal oleh IDE. Pada dasarnya logika pemrograman di setiap software hampir sama, hanya saja terdapat istilah-istilah atau perintah-perintah dasar yang menjadi cirikhas setiap software.
Terdapat dua perintah pada tampilan awal program IDE yaitu void_setup () dan void_loop (). Viod_setup () merupakan tempat untuk mendefinisikan pin atau socket pada microcontroller arduino untuk berfungsi sebagai sesuatu misalnya pin 1 didefinisikan sebagai input dan pin 2 didefinisikan sebagai output. Sedangkan void_loop () merupakan area untuk memberikan istruksi pada program tentang apa yang harus dilakukan program apabila terdapat input dalam keadaan tertentu. Void_loop () memberikan instruksi secara terus menerus selama tidak ada perintah tertentu untuk menghentikan program.
II-39
Gambar 2. 63. Tampilan awal IDE
Fungsi-fungsi dasar yang digunakan untuk memberikan instruksi pada microcontroller arduino akan di berikan pada tabel 2.1.
Tabel 2.1. Perintah Dasar pada Program Arduino Perintah/ Instruksi dasar pemrograman Arduino
1 Jangkauan Variabel
Variabel Kegunaan
byte Menyimpan input angka bulat 8-bit dengan rentang nilai 0-255 Int
Menyimpan input angka bulat 16-bit dengan rentang nilai 32,767 hingga -32.767
Long
Menyimpan input angka bulat 32-bit dengan rentang lebih dari 2 milyar
Float
Memnyimpan data angka yang memungkinkan untuk angka desimal
2 Kenaikan dan Penurunan Angka
II-40
Tabel 2.1. Perintah Dasar pada Program Arduino (lanjutan) Perintah/ Instruksi dasar pemrograman Arduino
2 Kenaikan dan Penurunan Angka
x-- penurunan angka dengan nilai penurunan 1 secara konstan
x+y
penambahan angka dengan nilai penambahan sebesar y secara konstan
x-v
penurunan angka dengan nilai penurunan sebesar y secara konstan
x/y nilai x dibagi dengan nilai y x*y nilai x dikali dengan nilai y
3 Operator Pembanding
x== x sama dengan y x!y x tidak sama dengan y x<y x kurang dari y x>y x lebih besar dari y
x<=y x kurang dari sama dengan y X>=y x lebih dari sama dengan y
4 Instruksi/ Perintah
High/Low Mendefinisikan keadaan pin pada arduino apakah high/ low
Input/ Output
Mendefinisikan pin pada arduino yang bertugas sebagai input dan output
digitalWrite Memerintahkan pin digital sebagai High/Low
digitalRred Membaca keadaan suatu pin digital apakah high/low analogWrite Memerintahkan pin analog sebagai High/Low
analogRead Membaca keadaan suatu pin analog apakah high/low Serial.begin Memanggil serial monitor
serial.println Mencetak data yang terbaca pada serial monitor