60 | I t e k s V o l 1 2 N o 2
Penerapan Logika Fuzzy Berbasis Arduino Uno R3 Pada
Penetral Lampu Sein Sepeda Motor Otomatis
Application of Fuzzy Logic Based on Arduino Uno R3 in Automatic Motorcycle Turn
Signal Neutralizers
Utis Sutisna1.a, Raden Nur Cahyono2, Siswanto Nurhadiyono3
1,2,3 Teknik Elektro Sekolah Tinggi Teknik Wiworotomo Purwokerto a Corresponding Author, e-mail: [email protected]
Abstraksi
Kecelakaan yang melibatkan sepeda motor masih mendominasi jumlah kecelakaan lalu lintas jalan yang terjadi. Sebagian kecelakaan ini terjadi diantaranya karena kelalaian seperti lupa untuk mematikan lampu sein pada saat selesai berbelok di persimpangan, dan lain-lain. Diantara solusi yang ditawarkan adalah penerapan alat penetral lampu sein otomatis pada sepeda motor. Penelitian ini menerapkan logika fuzzy metode Sugeno untuk sistem penetral lampu sein otomatis menggunakan modul Arduino Uno R3 dengan mikrokontroler ATMega328P. Sensor HMC5883L dan sensor potensiometer digunakan untuk mengenali belokan, sedangkan sensor Effect Hall digunakan untuk mengenali kecepatan. Hasil pengujian menunjukkan bahwa untuk belokan konstan dengan kecepatan yang semakin cepat menghasilkan delay off yang semakin cepat, sedangkan untuk kecepatan konstan dengan belokan yang semakin besar menghasilkan delay off yang semakin cepat. Hal ini menunjukkan bahwa penerapan logika fuzzy dengan metode sugeno untuk sistem penetral lampu sein dapat bekerja dengan baik.
Kata kunci: Penetral lampu sein, logika fuzzy metode Sugeno, sensor HMC5883L, sensor Effect Hall.
Abstraction
Accidents involving motorbikes still dominate the number of road traffic accident Some of these accidents occur due to negligence, such as forgetting to turn off the turn signal after turning at a crossroads, and so on.Among the solutions offered is the application of an automatic turn signal neutralizer on a motorcycle. This research applies the Sugeno method fuzzy logic for automatic turn signal neutralizer system using the Arduino Uno R3 module with ATMega328P microcontroller. The HMC5883L sensor and potentiometer sensor are used to recognize turns, while the Effect Hall sensor is used to recognize speed. The test results show that for a constant turn with a faster speed the faster delay off is produced, while for a constant speed with a greater turn, the delay off is faster. This shows that the application of fuzzy logic with the Sugeno method for the turn signal neutralizer system can work well.
Key words: Turn signal neutralizer, Sugeno method fuzzy logic, HMC5883L sensor, Effect Hall
sensor.
1. Latar Belakang
Pengguna kendaraan sepeda motor khususnya di Indonesia saat ini semakin meningkat, terbukti pada tahun 2019 populasi terbanyak masih disumbang oleh sepeda motor dengan jumlah 112.771.136 unit di seluruh Indonesia [1]. Dengan semakin meningkatnya kendaraan sepeda motor semakin meningkat pula angka kecelakaan yang ditimbulkan. Data Kepolisian Republik Indonesia (Polri) menyebutkan bahwa di sepanjang tahun 2018, dari 196.457 kejadian, 73,49% kecelakaan lalu lintas jalan melibatkan sepeda motor [2]. Kecelakaan ini sebagian terjadi karena kurang pemahaman dalam berkendara dan kelalaian seperti lupa untuk mematikan lampu sein pada saat selesai berbelok di persimpangan.
Penelitian ini merupakan pengembangan dari penelitian terkait penetral lampu sein sepeda motor otomatis [3]. Selain itu, penelitian-penelitian lain yang terkait adalah penelitian tentang odometer digital untuk kendaraan berbasis mikrokontroler [4] [5].
61 | I t e k s V o l 1 2 N o 2
Pada penelititan sebelumnya digunakan kompas sebagai referensi dimana lampu sein mati secara otomatis jika sepeda motor sudah berubah sudut dari 0o-30o dan jika kurang dari 30o maka lampu sein tetap menyala, kemudian jika melewati belokan panjang lampu sein akan mati sebelum selesai berbelok. Dalam penelitian ini diterapkan logika fuzzy [6] dalam mengenali jenis-jenis belokan dan kecepatan untuk kemudian menentukan lamanya lampu sein mati secara otomatis.
2. Metode
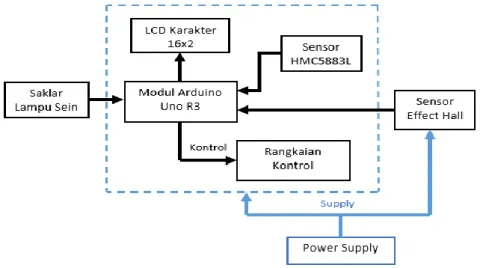
Beberapa bahan yang digunakan untuk membuat sistem penetral lampu sein sepeda motor otomatis menggunakan logika fuzzy dalam penelitian ini adalah mikrokontroler ATMega328P, Arduino Uno R3, sensor HMC5883LCompas 3-axis [7], sensor Hall Effect [8], dan sensor Potensiometer. Diagram blok sistem ditunjukkan pada Gambar 1.
Gambar 1. Diagram blok sistem.
Diagram proses sistem diperlihatkan pada Gambar 2. Dalam hal ini sistem dirancang untuk pengaturan lamanya lampu sein sepeda motor untuk mati secara otomatis (delay off) menggunakan logika fuzzy.
62 | I t e k s V o l 1 2 N o 2 A. Deteksi Belokan dan Kecepatan
Dalam perancangan ini digunakan sensor HMC5883L sebagai pembacaan belokan dan sensor Hall Effect sebagai pembaca kecepatan sepeda motor. Sensor HMC5883L mengeluarkan data serial berupa data ratusan, puluhan dan satuan dan sensor Hall Effect mengeluarkan data digital berupa high dan low. Hasil pembacaan sensor HMC5883L dan Hall Effect dijadikan masukan mikrokontroler pada Arduino sekaligus masukan tahap fuzzifikasi pada kontrol logika fuzzy. 1) Pembacaan sensor HMC5883L dan sensor Potensiometer
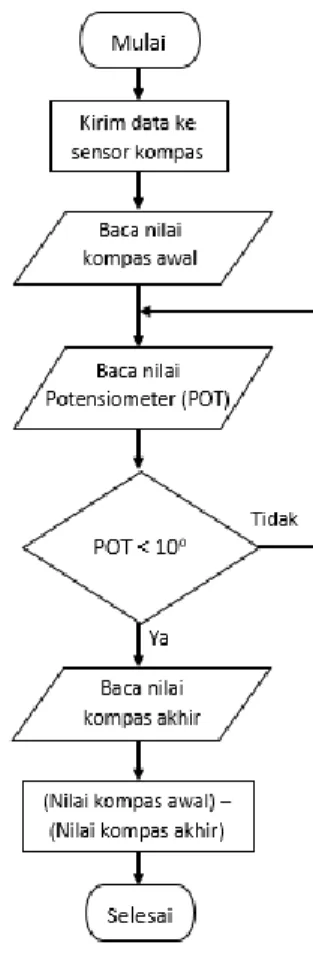
Gambar 3. Pembacaan sensor kompas dan sensor potensiometer.
Pembacaan sensor kompas (HMC5883L) dan sensor poternisometer diawali dari pengiriman data berupa kode hexadesimal ke sensor kompas dan baca nilai kompas awal. Setelah didapat nilai sensor kompas awal, sensor potensiometer mulai aktif dan mebaca nilai derajat setang sepeda motor. Nilai sudut setang lebih besar dari 10o menunjukkan bahwa sepeda motor sedang berbelok dan sudut setang lebih kecil dari 10o menunjukkan sepeda motor selesai berbelok dan sensor kompas membaca nilai akhir. Untuk mendapatkan selisih atau nilai belokan adalah dengan cara nilai kompas awal dikurangi nilai kompas akhir.
2) Pembacaan sensor Effect Hall
Seperti ditunjukkan pada Gambar 4, pembacaan sensor Effect Hall diawali dari pengiriman data digital berupa high-low, kemudian data high-low tersebut diolah menggunakan fungsi counter pada mikrokontroler.
Pengujian untuk mendeteksi kecepatan dilakukan dengan menerapkan program sebagaimana diagram alir pada Gambar 4 dan meletakan sensor diatas mangkuk odometer untuk mendeteksi magnet permanen yang berputar sesuai perputaran roda sepeda motor. Hasil pembacaan sensor Effect Hall ditampilkan di LCD untuk berikutnya dikalibrasi agar sesuai.
63 | I t e k s V o l 1 2 N o 2
Gambar 4. Pembacaan sensor Effect Hall. B. Fuzzifikasi
Dalam penelitian ini digunakan fungsi keanggotaan tipe triangular dengan alasan komputasi yang sederhana serta efisien. Variabel dan himpunan fuzzy ditunjukkan pada Tabel 1.
Tabel 1. Variabel dan himpunan fuzzy
Fungsi Variabel Himpunan Domain Fungsi Keanggotaan
Input Belokan Lancip [30, 70] Trapesium Sedang [50, 90] Segitiga Tumpul [70, 110] Trapesium Kecepatan Lambat [5, 25] Trapesium Sedang [10, 40] Segitiga Cepat [25, 45] Trapesium Output Delay off
Lambat [10] Singleton
Sedang [6] Singleton
Cepat [2] Singleton
1) Himpunan fuzzy variabel input “Belokan”
Pada variabel belokan didefinisikan tiga himpunan fuzzy yaitu Lancip, Siku dan Tumpul. Himpunan fuzzy untuk variabel belokan direpresentasikan pada Gambar 5.
Gambar 5. Fungsi keanggotaan variabel belokan. 2) Himpunan fuzzy variabel input “Kecepatan”
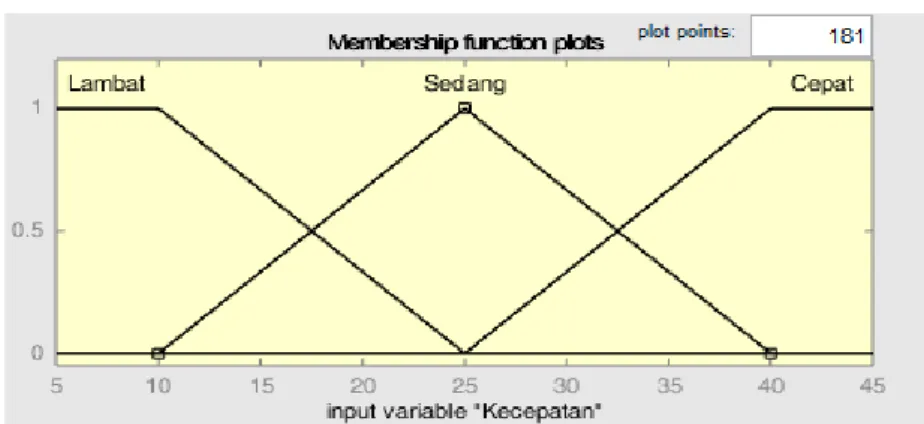
Pada variabel kecepatan didefinisikan tiga himpunan fuzzy yaitu Lambat, Sedang dan Cepat. Himpunan fuzzy untuk variabel kecepatan direpresentasikan pada Gambar 6.
64 | I t e k s V o l 1 2 N o 2
Gambar 6. Fungsi keanggotaan variabel kecepatan. 3) Himpunan fuzzy variabel output “Delay off”
Untuk variabel Delay off didefinisikan tiga himpunan fuzzy yaitu Lambat, Sedan dan Cepat. Fungsi keanggotaan output menggunakan fungsi keanggotaan singleton [9], seperti pada Gambar 7.
Gambar 7. Fungsi keanggotaan variabel Delay off. C. Sistem Inferensi
Sistem inferensi yang digunakan adalah model Sugeno [9]. Berdasarkan fungsi keanggotaan masukan dan keluaran yang telah ditentukan, maka langkah selanjutnya adalah membuat aturan-aturan (rule) dalam sebuah penalaran. Basis aturan fuzzy yang digunakan ditunjukan pada Tabel 2.
Tabel 2. Basis aturan fuzzy
No Aturan
1 If (Belokan is Lancip) and (Kecepatan is Lambat) then (Delay Off is Lambat)(1) 2 If (Belokan is Lancip) and (Kecepatan is Sedang) then (Delay Off is Lambat)(1) 3 If (Belokan is Lancip) and (Kecepatan is Cepat) then (Delay Off is Sedang)(1) 4 If (Belokan is Siku) and (Kecepatan is Lambat) then (Delay Off is Sedang)(1) 5 If (Belokan is Siku) and (Kecepatan is Sedang) then (Delay Off is Sedang)(1) 6 If (Belokan is Siku) and (Kecepatan is Cepat) then (Delay Off is Cepat)(1) 7 If (Belokan is Tumpul) and (Kecepatan is Lambat) then (Delay Off is Cepat)(1) 8 If (Belokan is Tumpul) and (Kecepatan is Sedang) then (Delay Off is Cepat)(1) 9 If (Belokan is Tumpul) and (Kecepatan is Cepat) then (Delay Off is Cepat)(1) D. Defuzzifikasi
Proses defuzzifikasi bertujuan mengubah solusi keluaran fuzzy menjadi suatu keluaran
65 | I t e k s V o l 1 2 N o 2
sistem ini menggunakan metode Sugeno orde nol [6][10]. Metode yang digunakan ialah Weigth
Average dirumuskan sebagai berikut:
𝑊𝐴 = 𝑝𝑟𝑒𝑑𝑖𝑘𝑎𝑡1∗𝑧1+𝑝𝑟𝑒𝑑𝑖𝑘𝑎𝑡2∗𝑧2+𝑝𝑟𝑒𝑑𝑖𝑘𝑎𝑡3∗𝑧3+⋯+𝑝𝑟𝑒𝑑𝑖𝑘𝑎𝑡 𝑛
predikat1+𝑝𝑟𝑒𝑠𝑖𝑘𝑎𝑡2+predikat3+⋯+𝑝𝑟𝑒𝑑𝑖𝑘𝑎𝑡 𝑛 (1)
Gambar 8 memperlihatkan tata letak pemasangan seluruh komponen dan rangkaian dari sistem.
Gambar 8. Tata letak pemasangan rangkaian
3. Hasil Penelitian
Pengujian dilakukan dengan mengendarai sepeda motor di jalan dengan berbagai macam belokan dan kecepatan. Data yang diambil berupa nilai belokan, niai kecepatan, nilai delay off dan rata-rata delay off. Data dari pengujian dianalisis dengan mengambil sample belokan konstan dan kecepatan yang semakin cepat, kemudian sebaliknya dengan menggunakan kecepatan konstan dan nilai belokan yang semakin besar.
Hasil pengujian yang dilakukan dengan menggunakan simulasi dan mengendarai sepeda motor di jalan diperlihatkan pada Tabel 3 sampai Tabel 6.
Tabel 3. Hasil pengujian kecepatan 5-10 km/jam Pengujian
ke-
Variabel Masukan Variabel Keluaran Belokan (o) Kecepatan (km/jam) Delay Off (detik) Rata-Rata Delay Off (detik) 1 (30o ≤ belokan ≤ 40o) 32 7 10 10 31 8 10 38 6 10 35 5 10 39 6 10 2 (40o ≤ belokan ≤ 60o) 47 8 10 10 43 5 10 48 6 10 45 6 10 41 5 10 3 (60o ≤ belokan ≤ 70o) 63 5 8 7.6 65 7 7 61 7 8 68 6 7 62 8 8 4 (70o ≤ belokan ≤ 80o) 74 7 6 5.6 72 9 6 79 6 5 73 5 6 75 9 5 Tabel 3. (Lanjutan) Pengujian ke-
Variabel Masukan Variabel Keluaran Belokan (o) Kecepatan (km/jam) Delay Off (detik) Rata-Rata Delay Off (detik) 5 (80o ≤ belokan ≤ 90o) 83 10 4 3.2 86 7 3 90 6 2 87 6 3 83 7 4 6 (90o ≤ belokan ≤ 100o) 93 6 2 2 91 5 2 91 6 2 95 5 2 92 7 2 7 (100o ≤ belokan ≤ 110o) 104 8 2 2 108 6 2 107 5 2 102 6 2 104 5 2
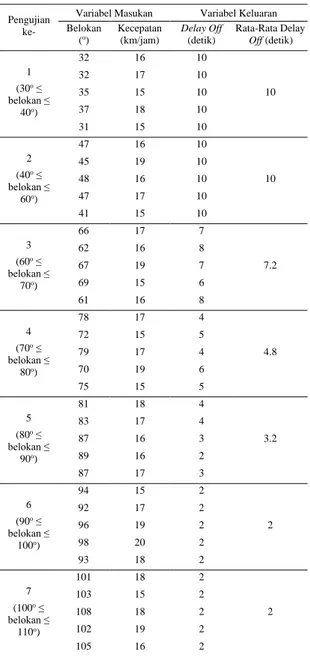
66 | I t e k s V o l 1 2 N o 2 Tabel 4. Hasil pengujian kecepatan 15-20
km/jam Pengujian
ke-
Variabel Masukan Variabel Keluaran Belokan (o) Kecepatan (km/jam) Delay Off (detik) Rata-Rata Delay Off (detik) 1 (30o ≤ belokan ≤ 40o) 32 16 10 10 32 17 10 35 15 10 37 18 10 31 15 10 2 (40o ≤ belokan ≤ 60o) 47 16 10 10 45 19 10 48 16 10 47 17 10 41 15 10 3 (60o ≤ belokan ≤ 70o) 66 17 7 7.2 62 16 8 67 19 7 69 15 6 61 16 8 4 (70o ≤ belokan ≤ 80o) 78 17 4 4.8 72 15 5 79 17 4 70 19 6 75 15 5 5 (80o ≤ belokan ≤ 90o) 81 18 4 3.2 83 17 4 87 16 3 89 16 2 87 17 3 6 (90o ≤ belokan ≤ 100o) 94 15 2 2 92 17 2 96 19 2 98 20 2 93 18 2 7 (100o ≤ belokan ≤ 110o) 101 18 2 2 103 15 2 108 18 2 102 19 2 105 16 2
Tabel 5. Hasil pengujian dengan kecepata 25-30 km/jam
Pengujian ke-
Variabel Masukan Variabel Keluaran Belokan (o) Kecepatan (km/jam) Delay Off (detik) Rata-Rata Delay Off (detik) 1 (30o ≤ belokan ≤ 40o) 31 26 10 9.8 37 25 10 36 27 10 34 25 10 32 29 9 2 (40o ≤ belokan ≤ 50o) 42 28 9 9.8 44 25 10 45 26 10 48 26 10 43 25 10 Tabel 5. (Lanjutan) Pengujian ke-
Variabel Masukan Variabel Keluaran Belokan (o) Kecepatan (km/jam) Delay Off (detik) Rata-Rata Delay Off (detik) 3 (50o ≤ belokan ≤ 60o) 52 28 8 8.4 51 30 8 54 26 9 53 26 9 54 27 8 4 (60o ≤ belokan ≤ 70o) 64 25 7 7 62 29 7 61 30 7 64 26 7 60 28 7 5 (70o ≤ belokan ≤ 80o) 71 25 6 5.8 70 26 6 72 29 5 72 26 6 71 27 6 6 (80o ≤ belokan ≤ 90o) 83 26 4 3.6 81 28 4 81 25 4 85 26 3 82 29 3
Tabel 6. Hasil pengujian dengan kecepatan 35-40 km/jam
Pengujian ke-
Variabel Masukan Variabel Keluaran
Belokan (o) Kecepatan (km/jam) Delay Off (detik) Rata-Rata Delay Off (detik) 1 (30o ≤ belokan ≤ 40o) 32 37 7 7 31 35 8 30 39 7 32 36 7 35 40 6 2 (40o ≤ belokan ≤ 50o) 46 37 7 7 42 36 7 48 39 7 45 36 7 43 36 7 3 (50o ≤ belokan ≤ 60o) 54 38 6 6.6 58 37 6 54 35 7 50 39 7 53 37 7 4 (60o ≤ belokan ≤ 70o) 68 35 5 5.6 63 36 5 65 33 6 66 32 6 62 35 6 5 (70o ≤ belokan ≤ 80o) 73 36 3 3 71 38 3 75 36 3 72 35 3 73 39 3
67 | I t e k s V o l 1 2 N o 2
Tabel 6. (Lanjutan) Pengujian
ke-
Variabel Masukan Variabel Keluaran Belokan (o) Kecepatan (km/jam) Delay Off (detik) Rata-Rata Delay Off (detik) 6 (80o ≤ belokan ≤ 90o) 83 33 3 3 83 34 3 87 37 3 81 33 3 85 34 3 4. Pembahasan
Untuk mengetahui pengaruh kecepatan, dapat dilakukan pengambilan sampel belokan yang konstan dengan kecepatan yang bervariasi seperti ditunjukkan pada Tabel 7 dan Gambar 9. Adapun untuk mengetahi pengaruh belokan dapat dilakukan pengambilan sampel kecepatan konstan dengan belokan yang bervariasi seperti ditunjukkan pada Tabel 8 dan Gambar 10.
Tabel 7. Belokan 72o dengan variabel kecepatan. Belokan (o) Kecepatan (km/jam) Delay Off (detik) 72 9 6 15 5 29 5 35 3
Gambar 9. Grafik delay off dengan belokan 72o dan variabel kecepatan.
Dari Tabel 7 dan Gambar 9 dapat diketahui bahwa belokan konstan dengan kecepatan yang semakin cepat menghasilkan delay off yang semakin cepat.
Tabel 8. Kecepatan 15 km/j dengan variabel belokan. Kecepatan (km/jam) Belokan (o) Delay Off (detik) 5 30 10 43 10 68 6 78 4
Gambar 10. Grafik delay off dengan kecepatan 15 km/jam dan variabel belokan.
Dari Tabel 8 dan Gambar 10 diketahui bahwa kecepatan konstan dengan belokan yang semakin besar menghasilkan delay off yang semakin cepat.
Hasil dari kedua analisis diatas menunjukkan bahwa belokan dan kecepatan mempengaruhi
delay off yang dihasilkan. Ini menunjukkan bahwa sistem penetral lampu sein menggunakan logika
fuzzy metode Sugeno bekerja dengan baik sesuai dengan yang diharapkan.
0 2 4 6 8 0 10 20 30 40 Vari abe l Delay Off Variabel Kecepatan 0 5 10 15 0 50 100 Vari abe l Delay Off Variabel Belokan
68 | I t e k s V o l 1 2 N o 2
5. Kesimpulan
5.1 Kesimpulan
Penelitian penerapan logika fuzzy metode Sugeno untuk sistem penetral lampu sein otomatis pada sepeda motor berbasis modul Arduino Uno R3 dengan mikrokontroler ATMega328P telah dilakukan. Sensor HMC5883L dan sensor potensiometer digunakan untuk mengenali belokan, yang kemudian dalam sistem fuzzy dibagi menjadi tiga fungsi keanggotaan yaitu Lancip, Siku, dan Tumpul. Sedangkan, sensor Effect Hall digunakan untuk mengenali kecepatan, yang dibagi menjadi tiga fungsi keanggotaan yaitu Lambat, Sedang, dan Cepat. Variabel output pada kontrol logika fuzzy adalah Delay off dengan fungsi keanggotaan Lambat, Sedang, dan Cepat.
Hasil akhir dari pengujian menunjukkan bahwa untuk belokan konstan dengan kecepatan yang semakin cepat menghasilkan delay off yang semakin cepat, sedangkan untuk kecepatan konstan dengan belokan yang semakin besar menghasilkan delay off yang semakin cepat. Secara keseluruhan, penerapan logika fuzzy Sugeno untuk penetral lampu sein pada sepeda motor secara otomatis ini memberikan hasil yang baik sesuai dengan yang diharapkan.
5.2 Saran
Guna memberikan hasil yang lebih baik, penelitian penerapan logika fuzzy untuk sistem penetral lampu sein otomatis pada sepeda motor ini perlu dikembangkan lebih lanjut dengan menerapkan atau menambahkan metode-metode lain, atau dengan menambahkan variabel input sehingga dapat meningkatkan tingkat keakuratan output. Selain itu, hasil yang sudah dicapai dalam penelitian ini bisa ditindaklanjuti untuk pengembangan dan penerapannya dalam skala industri.
Daftar Pustaka
[1] Badan Pusat Ststistik, “Perkembangan Jumlah Kendaraan Bermotor Menurut Jenis (Unit),
2017-2019” https://www.bps.go.id/indicator/17/57/1/jumlah-kendaraan-bermotor.html
[2] Setijowarno, Djoko, “Sepeda Motor Penyumbang Kecelakaan Terbesar di Jalan Raya”, Bisnis News, 1 Maret 2020. https://bisnisnews.id/detail/berita/sepeda-motor-penyumbang-kecelakaan-terbesar-di-jalan-raya.
[3] Wicaksana, C. 2015. “Perancangan Alat Penetral Lampu Sein Sepeda Motor Otomatis
Berbasis Arduino Uno R3”. Teknik Elektro, Sekolah Tinggi Teknik Wiworotomo
Purwokerto.
[4] Thalib, Fadhlan, M. 2015. “Odometer Digital Sepeda Berbasis Mikrokontroler AT89S51
Dengan Tampilan Seven Segment”. Record 491, Perpustakaan Universitas Gunadarma.
Depok.
[5] Khoswanto, Handry. 2003. “Odometer Digital untuk Kendaraan dengan Mikrokontroler
MCS51”. Vol 5, No 2. Jurnal Teknik Mesin, Surabaya.
[6] Kusumadewi, Sri dan Hartati, Sri. 2006. Neuro Fuzzy Integrasi Sistem Fuzzy dan Jaringan Syaraf. Penerbit Graha Ilmu. Yogyakarta.
[7] , 2013, “HMC5883L 3-Axis Digital Compass IC.pdf”, Datasheet Honeywell. Diakses tanggal 30 Juli 2016.
[8] , 2005, “Hall-US1881EUA.pdf”, Datasheet Spark fun Electronics. Diakses tanggal 30 Juli 2016.
[9] Suyanto. 2014. Artificial Intelligence : Searching, Reasonig, Planning dan Learning. Penerbit Informatika. Bandung.
[10] Kusumadewi, Sri. 2003. Artificial Intelligence (Teknik dan Aplikasinya). Penerbit Graha Ilmu. Yogyakarta.