1 I.1. Latar Belakang
Virginia Indonesia Company (VICO) berencana memodifikasi beberapa kilang (plant) yang berlokasi di Pamaguan, Nilam 2, Nilam 4, Nilam 5 dan Badak. VICO perlu membangun fasilitas tambahan maupun mengubah bentuk dari kilang tersebut. PT Rekayasa Engineering sebagai kontraktor utama VICO dalam bidang
Engineer & Contruction meminta PT. Lidar Indonesia Geospasial untuk melakukan
as build menggunakan metode 3D Laser Mapping dan selanjutnya dilakukan
pembentukan model tiga dimensi sebagai usaha untuk mendukung proses modifikasi kilang produksi. Di sektor konstruksi pemodelan tiga dimensi digunakan untuk merancang desain struktural maupun desain produk, dimana teknologi ini dijadikan alat untuk mempertimbangkan aspek finansial maupun pengalokasian waktu yang diperlukan dalam pekerjaan kontruksi.
Pemodelan tiga dimensi adalah membentuk karakter ataupun objek dalam bentuk koordinat tiga dimensi dengan pengembangan representasi matematika dari objek. Model tiga dimensi dapat membantu untuk memperjelas maksud dari rancangan objek karena bentuk sesungguhnya dari objek akan divisualisasikan secara nyata. Pembentukan sebuah model tiga dimensi dapat dilakukan menggunakan beberapa cara, namun dalam pekerjaan ini pembentukan objek dilakukan berdasarkan susunan dari geometri objek sederhana. Geometri objek sederhana merupakan suatu objek yang bentuknya teratur dan besarannya bisa ditentukan melalui perhitungan matematis seperti tabung, bola dan kotak.
Dalam proyek ini dilakukan pengolahan data point cloud hasil penyiaman di lapangan dan diolah menjadi model tiga dimensinya. Model tiga dimensi objek terbentuk oleh beberapa bentuk geometri sederhana. Bentuk geometri objek-objek sederhana disusun sedemikian hingga membentuk model tiga dimensi objek dengan pertimbangan standard yang berlaku di perusahaan. Dalam pemodelan, diutamakan bentuk jaringan perpipaan dengan infrastruktur penunjangnya seperti kontruksi
bangunan, instrument penunjang, trey, Acces Stay Leader(ASL), dan safety yang ada di lapangan.
Dari keseluruhan proyek yang berlangsung, porsi tugas akhir ini adalah membuat model tiga dimensi sebuah kilang (plant) dengan menggunakan bentuk geometri objek sederhana yang beracuan pada data point cloud hasil penyiaman di lapangan. Model tiga dimensi tersebut akan dijadikan klien sebagai dasar untuk melakukan tindak lanjut dalam kontruksi dan inventarisasi kilang (plant) secara jangka pendek maupun jangka panjang.
I.2. Batasan masalah
Pada laporan proyek ini batasan masalah yang digunakan yaitu :
1. Lokasi pekerjaan dalam proyek ini adalah Satellite Nilam 2, Vico Indonesia yang berlokasi di Muara Badak, Kalimantan Timur.
2. Tidak membahas mengenai akuisisi data untuk menghasilkan raw data.
3. Bentuk pemodelan dalam proyek ini adalah menggunakan bentuk geometri objek sederhana dengan kategori batas serta menggunakan template yang telah disediakan pada perangkat lunak cyclone.
4. Sistem koordinat yang digunakan adalah sistem koordinat lokal pada alat perekam.
I.3. Tujuan
Proyek tugas akhir ini bertujuan untuk memodelkan data point cloud dari kilang Satellite Nilam 2 menjadi model tiga dimensi menggunakan bentuk geometri objek sederhana seperti tabung, bola dan kotak.
I.4. Manfaat
Manfaat dari model tiga dimensi ini adalah sebagai inventarisasi dan memudahkan para insinyur untuk melakukan perencanaan tanpa harus meninjau langsung ke lapangan karena model telah menyerupai keadaan sesuangguhnya dengan memiliki tingkat kesesuaian bentuk yang tinggi.
I.5. Landasan Teori I.5.1. Terrestrial Laser Scanner
Laser merupakan mekanisme suatu alat yang memancarkan radiasi elektromagnetik, umumnya dalam bentuk cahaya yang tidak dapat dilihat maupun dengan mata normal, melalui proses pancaran terstimulasi. LASER sendiri kepanjangan dari Light Amplification by Stimulated Emission of Radiation.
Terrestrial Laser Scanner adalah suatu peralatan yang memanfaatkan aplikasi
sinar laser dimana digunakan untuk penyiaman suatu kenampakan objek dengan memanfaatkan sensor aktif. Sensor aktif ini memberikan suatu keuntungan yaitu tidak adanya ketergantungan terhadap kondisi pencahayaan yang mungkin berbeda secara signifikan misal daerah bervegetasi. Hasil dari peyiaman ini akan memperoleh kumpulan titik-titik 3D (X, Y dan Z) atau point cloud dari objek tersebut secara cepat dan akurat dalam jumlah titik penyiaman ( point cloud ) yang banyak dan real time. Terdapat 2 jenis scanner berdasarkan sistem pengukurannya, antara lain :
1. Time of flight scanner. Akurasi rendah karena merupakan tipe scanner jarak jauh
dengan cakupan 1,5 – 6.000 meter. Scanner jenis ini cepat dalam melakukan akuisisi data dan titik yang didapat hingga mencapai 11.000 – 122.000 titik setiap detiknya.
2. Phase comparison scanner. Akurasi yang dihasilkan tinggi karena merupakan
tipe scanner jarak menengah. Akan tetapi, scanner jenis ini dapat mengukur hingga 1.000.000 titik setiap detiknya.
Kelebihan Terrestrial Laser Scanner dibandingkan dengan alat ukur konvensional lainnya yaitu pengambilan data lebih cepat dan kualitas hasil pengukuran yang jauh lebih akurasi. Kemudian untuk pengambilan data dan pengukuran dapat dilakukan dari jarak yang cukup jauh sehingga efisiensi dan keselamatan pekerja dapat terjamin, kemudian densitas titik yang didapat sangat tinggi sehingga menjamin survey topografi yang lengkap dan cepat.
Prinsip dasar perekaman data pada laser scanner adalah pulsa ditransmisikan tercermin dari objek yang kemudian dikembalikan ke sistem penerima yaitu memancarkan gelombang sinar laser hingga mengenai objek yang akan diukur kemudian objek tersebut memantulkan kembali gelombang sinar tersebut ke sistem penerima (Kholiq, D.I 2006). Selama proses pancaran gelombang akan diperoleh
perbedaan lama waktu saat gelombang laser dipancarkan keobjek dan waktu saat gelombang dipantulkan kembali ke alat laser scanner. Perbedaan waktu tersebut yang akan digunakan dalam menentukan jarak ukuran dari scan head ke objek. Persamaan untuk menentukan jarak ukuran dari scan head ke objek pada laser
scanner sebagai berikut :
Distance( R ) = ( C x △T )/2 …...…………...………(1.1)
Dimana :
R : jarak scanner dari titik objek
C : kecepatan gelombang sinar laser ( 3 x 108 m/s)
△T : jumlah waktu sinyal pergi dan pulang
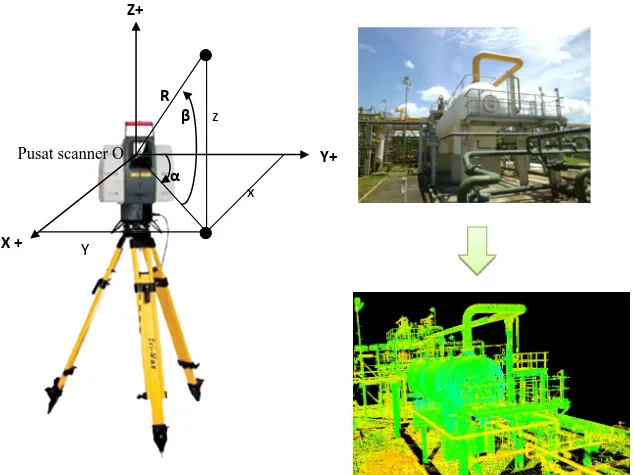
Data yang direkam berupa data sudut horizontal (α), sudut vertikal (β), dan jarak antara pusat koordinat scanner dengan objek yang direkam (R) seperti pada persamaan 1.1. dan Seperti dapat dilihat pada Gambar 1.1 prinsip perekaman data
scanner untuk bidang X dan Y dijadikan sebagai reference plane dalam koordinat
scan. Laser bergerak dari atas ke bawah dan ke samping kanan sesuai dengan arah perputaran jarum jam (Wicaksono H.P. 2006).
Dimana hasil pengukuran maka koordinat 3D objek yang direkam dapat ditentukan dengan persamaan berikut :
X= R . cos β.Sin α....………...……….….……(1.2)
Y= R . cos β. cos α …….………..……….…...…....(1.3)
Z= R . sin β……….……….……….….…...(1.4)
Dimana :
R : jarak dari scanner ke titik objek α : sudut horizontal titik objek β : sudut vertikal objek
Secara garis besar gambar I.1 merupakan prinsip perekaman data pada alat TLS hingga didapatnya data point cloud.
I.5.2. Sistem koordinat 3D
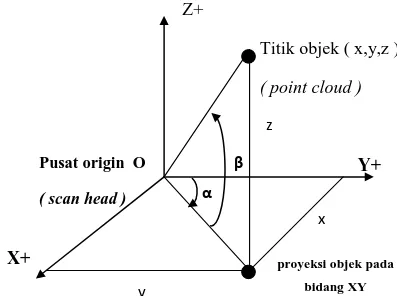
Sistem koordinat adalah pernyataan besaran geometri untuk menentukan posisi suatu titik dengan mengukur besaran vektor terhadap suatu suatu sumbu X, Y dan Z terhadap posisi acuan yang telah didefinisikan. Penetapan untuk titik acuan system koordinar ada 2 yaitu apabila hanya secara asumsi maka disebut sistem koordinat lokal dan apabila diikatkan pada referensi maka disebut sistem koordinat yang telah tereferensi. Sistem koordinat pada point cloud berupa titik-titik koordinat 3D, dimana setiap titik hasil penyiaman memiliki nilai koordinat masing-masing sumbu X, sumbu Y, dan sumbu Z. Kaidah dan aturan koordinat point cloud sesuai dengan kaidah tangan kanan seperti dapat dilihat pada Gambar I.2 sistem koordinat
Gambar I.1. Prinsip perekaman data dengan scanner (Soeta’at 2005)
α β X + Y+ Z+ x Y z Pusat scanner O R
3D tangan kanan bahwa pusat koordinat adalah tempat berdiri alat (scan head). Masing-masing sumbu X, Y dan Z yang saling tegak lurus tersebut saling berpotongan pada suatu titik, titik potong ketiga sumbu tersebut disebut sebagai pusat sumbu koordinat.
Sistem koordinat di dalam scan head menggunakan prinsip aturan tangan kanan (Right Hand Rule) seperti dapat dilihat pada Gambar I.2, yaitu sumbu Y+ searah dengan arah sinar laser, sumbu X+ tegak lurus sumbu Y+ dengan arah kanan
scanner, sedangkan sumbu Z+ tegak lurus dengan bidang X, Y. Arah proses
scanning pada scan head searah dengan perputaran jarum jam (Wicaksono H.P.
2006). Z+ Y+ X+ I.5.3. Pemodelan 3D
Pemodelan adalah membentuk suatu benda-benda atau objek. Membuat dan mendesain objek tersebut sehingga terlihat seperti hidup. Sesuai dengan objek dan basisnya, proses ini secara keseluruhan dikerjakan di komputer. Melalui konsep dan proses desain, keseluruhan objek bisa diperlihatkan secara 3 dimensi, sehingga banyak yang menyebut hasil ini sebagai pemodelan 3 dimensi (3D modelling).
Ada beberapa aspek yang harus dipertimbangkan bila membangun model objek, kesemuanya memberi kontribusi pada kualitas hasil akhir. Hal-hal tersebut
x
y
z Pusat origin O
( scan head )
Titik objek ( x,y,z ) ( point cloud )
proyeksi objek pada bidang XY
Gambar I.2. Sistem koordinat 3D tangan kanan dengan rotasi positif (+) pada setiap sumbunya
α β
meliputi metoda untuk mendapatkan atau membuat data yang mendeskripsikan objek, tujuan dari model, tingkat kerumitan, perhitungan biaya, kesesuaian dan kenyamanan, serta kemudahan manipulasi model. Proses pemodelan 3D membutuhkan perancangan yang dibagi dengan beberapa tahapan untuk pembentukannya. Seperti objek apa yang ingin dibentuk sebagai objek dasar, metoda pemodelan objek 3D, pencahayaan dan animasi gerakan objek sesuai dengan urutan proses yang akan dilakukan.
I.5.3.1 Pembentukan model tiga dimensi objek dari point cloud dengan metode region growing. Metode region growing adalah metode pengelompokan sub
region menjadi region yang lebih besar berdasarkan kriteria yang ada. Metode region
growing dimulai dengan memilih point yang digunakan sebagai seed dan selanjutnya
mencari point tetangga yang mirip. Maka dari itu akan terbentuk sebuah model yang lebih luas menurut persebaran dari point tetangga tersebut. Menurut Bryan S. Morse, di tahun 2000 dalam Lecture 18 : Segmentation (Region Based) menyebutkan beberapa tahapan dalam metode region growing, diantaranya :
a. Memilih seed point
Salah satu cara untuk memilih seed point adalah dengan melakukan secara interaktif. Seorang pengguna dapat mengklik mouse pada objek yang diinginkan dan idealnya mengisi seluruh objek . Tapi bagaimana dengan segmentasi otomatis keseluruhan? Salah satu cara adalah dengan menyebarkan seed point sekitar cloud objek. Jika tiga seed point belum cukup, dapat memasukkan seed point tambahan dengan memilih point di luar segmen.
b. Scanning
Beberapa daerah juga dapat diidentifikasikan dengan memindai point cloud secara berkala. Penambahkan point daerah dan pemilahan daerah baru yang diperlukan. Kemudian dapat dibuat melewati tambahan dari point tersebut untuk membentuk daerah ini. Pada dasarnya proses ini adalah pelabelan terhubung antar komponen yang sama dengan ukuran kesamaan bukannya nilai-nilai biner.
c. Region Merging
Batas pendekatan multipleseed point adalah menetapkan setiap point menjadi seed. Dua point atau lebih yang berdekatan memiliki kesamaan lalu menggabungkan seed tersebut menjadi satu wilayah. Jika dua daerah yang berdekatan secara kolektif memiliki kemiripan yang cukup maka daerah tersebut akan digabungkan juga. Kesamaan didasarkan pada perbandingan statistik dari masing-masing daerah.
d. Split and Merge Algoritma
Metode penggabungan murni kurang efisien dalam komputasinya karena proses penggabungan dimulai dari setiap seednya yang sangat banyak (point individu). Hal tersebut dapat dibuat lebih efisien dengan membagi objek menjadi daerah yang lebih kecil.
Apabila masing-masing daerah terkoheren, maka rekursif penggabungan ini menghasilkan daerah koheren yang lebih besar.Pertama, harus membagi objek. Dimulai dengan mempertimbangkan keseluruhan objek sebagai satu wilayah.
1. Tidak dilakukan pembagian objek jika seluruh wilayah koheren (yaitu, jika semua point di wilayah tersebut memiliki kesamaan yang cukup).
2. Apabila daerah tidak cukup koheren,maka harus dilakukan pembagian menjadi beberapa kuadran dan penerapan langkah-langkah sebelumnya dalam pengembangan wilayah baru hingga menjadi koheren.
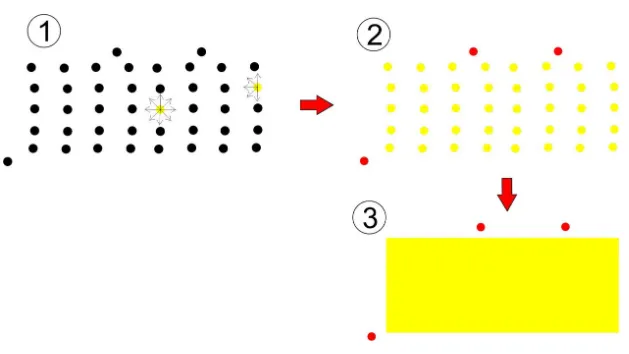
Pada gambar I.4 dapat dilihat proses perkembangan sebuah region (wilayah) dari langkah awal pemilihan seed point hingga terbentuknya sebuah wilayah objek. Begitu pula dengan algoritma dalam pembentukan region dapat dilihat pada gambar I.4.
Gambar I.3 Proses region growing
Keterangan :
: Point cloud sebuah objek
: Seed point
: Point tetangga yang memiliki kesamaan
: Point noise atau tidak dapat dibentuk region (wilayah) : Region yang terbentuk
Dimulai dari tahap ke-1 yaitu pemilihan seed point dari point cloud sebuah objek. Apabila sudah ditetapkan satu atau lebih seed point, maka tahapan selanjutnya adalah melakukan pencarian terhadap point tetangga yang memiliki kesamaan, ditunjukkan pada tahap ke-2. Dari pencarian tersebut didapat juga point noise yang tidak digunakan dalam pembentukan region karena tidak masuk dalam standar deviasi dengan seed point yang digunakan. Terakhir pada tahap ke-3 pembentukan
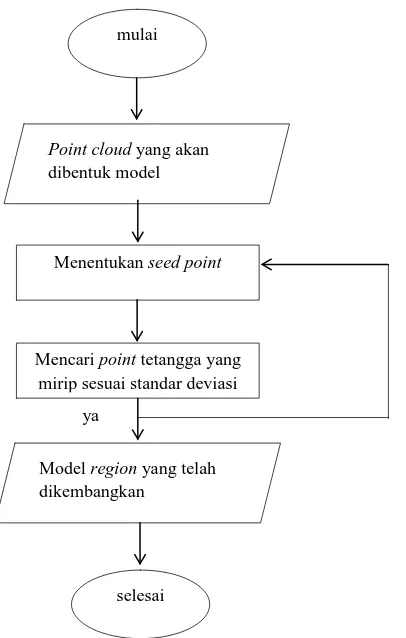
Pada gambar I.4. menunjukkan proses pembentukan model dengan pendekatan region growing, dimana proses dimulai dari input point cloud yang akan dimodelkan, penentuan seed hingga model region yang telah dikembangkan.
I.5.3.2 Proses Rendering. Rendering adalah proses akhir dari keseluruhan proses pemodelan ataupun animasi komputer. Dalam rendering, semua data-data yang sudah dimasukkan dalam proses modeling, animasi, texturing, pencahayaan dengan parameter tertentu akan diterjemahkan dalam sebuah bentuk output. Dalam
mulai
Point cloud yang akan
dibentuk model
Menentukan seed point
Mencari point tetangga yang mirip sesuai standar deviasi
Model region yang telah dikembangkan
selesai
tidak
ya
standard PAL system, resolusi sebuah render adalah 720 x 576 pixels. Bagian rendering yang sering digunakan:
a. Field Rendering, field rendering sering digunakan untuk mengurangi strobing
effect yang disebabkan gerakan cepat dari sebuah objek dalam rendering
video.
b. Shader, shader adalah sebuah tambahan yang digunakan dalam 3D software
tertentu dalam proses rendering. Biasanya shader diperlukan untuk memenuhi kebutuhan special effect tertentu seperti lighting effects,
atmosphere, fog dan sebagainya.
I.5.3.3. Texturing. Proses texturing ini untuk menentukan karakterisik sebuah materi objek dari segi tekstur. Untuk materi sebuah object bisa digunakan aplikasi properti tertentu seperti reflectivity, transparency, dan refraction. Texture kemudian bisa digunakan untuk membuat berbagai variasi warna pattern, tingkat kehalusan/kekasaran sebuah lapisan objek secara lebih detail.
I.5.3.4 Image dan Display. Image dan display merupakan hasil akhir dari keseluruhan proses dari pemodelan. Biasanya objek pemodelan yang menjadi output adalah berupa gambar untuk kebutuhan koreksi pewarnaan, pencahayaan, atau visual
effect yang dimasukkan pada tahap penambahan tekstur pemodelan.
I.5.4 Software Cyclone
Cyclone merupakan perangkat lunak yang dikembangkan oleh Cyra untuk
efisiensi operasional semua sistem penyiaman HDS dari Leica. Secara singkat perangkat lunak Cyclone memiliki tiga fungsi utama yaitu:
1. Mengoperasikan Scanner sehingga dapat dilakukan penyiaman data objek.
2. Mengolah hasil penyiaman.
3. Mengintegrasikan data hasil pengolahan dengan aplikasi lain.
Dalam Manual Pemrosesan Data Dengan Software Cyclone yang disusun oleh Technical Support 3D Laser Scanning Division, PT. ALMEGA GEOSYSTEMS
menyebutkan beberapa istilah dalam software cyclone ada yang perlu diketahui, antara lain :
a. Database : Merupakan tempat penyimpanan data cyclone, dalam 1 database
bisa digunakan untuk menyimpan lebih dari 1 project
b. Project : Merupakan data tiap job/pekerjaan yang disimpan di dalam
database.
c. Station : Merupakan salah satu file di dalam project yang merupakan tempat
berdiri alat pada saat pengambilan data.
d. Scanworld : File di dalam folder station yang berisi data scan tiap sekali
pengambilan data. Sehingga dalam 1 station bisa terdapat lebih dari 1
scanworld. Scanworld menggunakan icon
e. ControlSpace : folder di dalam Scanworld yang berisi informasi titik
ikat atau target yang ada dalam data scan.
f. ModelSpaces : Folder dalam Scanworld yang berisi data tampilan hasil
scan. Di dalam ModelSpaces ada ModelSpace view ( ) yang merupakan file data tampilan.
g. Scan : Berisi data asli hasil scanning.
h. Images : Berisi data image hasil pengambilan foto dilapangan oleh scanner.
i. Registrations : Penggabungan data antara beberapa data/scanworld yang
diambil dari beberapa posisi berdiri alat. Dalam istilah umum biasa disebut rektifikasi/georeferensi data.
j. Point Cloud : Istilah untuk menyebut data point hasil scanning, disebut point
cloud karena jumlah point-nya yang sangat banyak (jutaan point).
k. Target : Titik yang digunakan sebagai titik ikat untuk
penggabungan/registrasi antar scanworld.
Untuk pembentukan geometri objek 3D khususnya, cyclone menggunakan metode Least-square. Pengguna dapat mendefinisikan sendiri berapa toleransi
kesalahannya. Objek yang dibentuk berdasarkan standar yang berlaku dan pengguna dapat mendefinisikan berdasarkan keperluan.
Perangkat lunak cyclone dapat dikoneksikan dengan perangkat lunak lain. Beberapa perangkat lunak tersebut antara lain; Autocad, Microstation, PDMS, dan Auto Plant. Keempat perangkat lunak tersebut dapat dikoneksikan langsung dengan cyclone melalui Plug-In dengan format COE (Cyclone Data Exchange). Selain format COE, ada beberapa format data lain yang dapat diimport ke cyclone, antara lain yaitu; ASCII (XYZ, PTS, SVY, PTX, TXT), RIEGL 3DD, CGP, BMP, JPEG, dan TIFF. Sedangkan format data yang dapat dieksport dari cyclone antara lain; COE, ASCII (XYZ, PTS, SVY, PTX, TXT,), BMP, JPEG dan TIFF.
I.5.5 Geometri Objek Sederhana
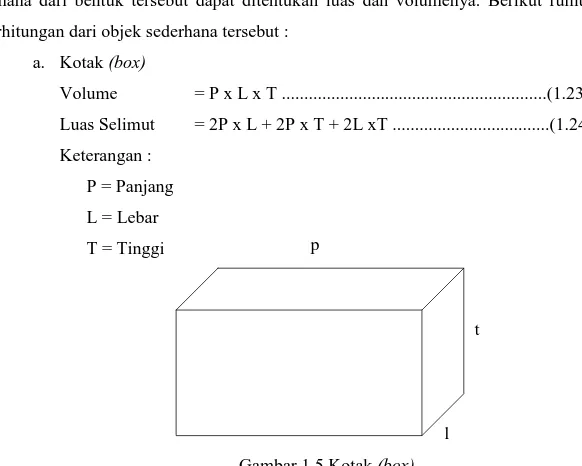
Menurut Sarinurrohman, 2005 menyebutkan bahwa objek sederhana merupakan suaru objek yang bentuknya teratur yang besarannya bisa ditentukan melalui perhitungan matematis. Beberapa objek sederhana itu kotak, silinder, bola, dimana dari bentuk tersebut dapat ditentukan luas dan volumenya. Berikut rumus perhitungan dari objek sederhana tersebut :
a. Kotak (box) Volume = P x L x T ...(1.23) Luas Selimut = 2P x L + 2P x T + 2L xT ...(1.24) Keterangan : P = Panjang L = Lebar T = Tinggi
Gambar 1.5 Kotak (box) p
l t
Gambar 1.5 merupakan ilustrasi gambar geometri sederhana dari kotak beserta komponennya, dimana bentuk geometri sederhana ini digunakan mewakili bentuk struktur bangunan ataupun penampang sebuah equipment.
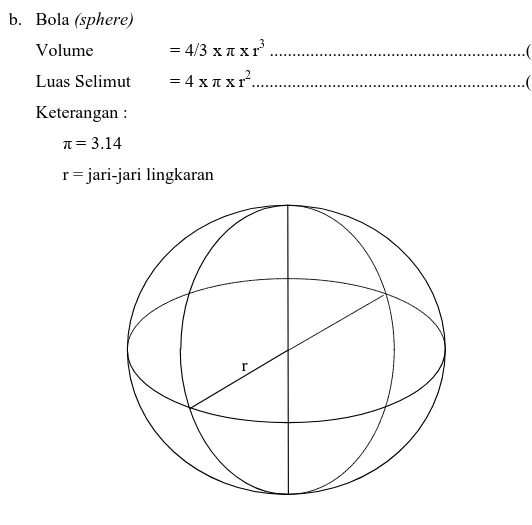
b. Bola (sphere) Volume = 4/3 x π x r3 ...(1.25) Luas Selimut = 4 x π x r2...(1.26) Keterangan : π = 3.14 r = jari-jari lingkaran
Gambar 1.6 bola (sphere)
Gambar 1.6 merupakan ilustrasi geometri sederhana dari bola beserta komponennya, dimana bentuk geometri sederhana ini digunakan mewakili bentuk dari beberapa bagian equipment dan penutup pipa.
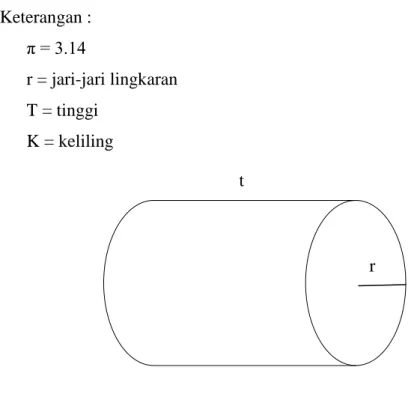
c. Tabung (silinder) Luas alas = π x r2 ...(1.27) Luas Sisi = T x K ...(1.28) Keliling = π x 2r ...(1.29) Luas Sisi = π x r2 x T ...(1.30) r
Keterangan : π = 3.14
r = jari-jari lingkaran T = tinggi
K = keliling
Gambar 1.7 tabung (silinder)
Gambar 1.7 merupakan ilustrasi geometri sederhana dari tabung beserta komponennya, dimana bentuk geometri sederhana ini digunakan untuk mewakili bentuk dari jaringan pipa, beberapa bagian equipment, instrument, dll.
I.5.6. Struktur Kilang
Struktur maupun mekanisme kilang erat kaitannya dengan teknologi perpipaan. Teknologi perpipaan adalah sistem atau instalasi untuk mengantarkan media, dimana aliran gas atau zat cair dialirkan didalamnya. Mungkin kondisi media yang dialirkan melewati pipa tersebut bersifat; asam, tekanan tinggi, temperatur tinggi dan lainnya. Sehingga para pabrikan masing-masing perlu memproduksi pipa dalam berbagai jenis dan pilihan, disesuaikan dengan kebutuhan.
Lapangan yang menggunakan pipa dalam peroses operasinya, antara lain adalah :
a. Perpipaan untuk Pembangkit Tenaga b. Perpipaan untuk Industri Bahan Gas
c. Perpipaan untuk Penyulingan Minyak Mentah d. Perpipaan untuk Pengangkutan Minyak e. Perpipaan untuk Proses Pendinginan
r t
f. Perpipaan untuk Tenaga Nuklir
g. Perpipaan untuk Distribusi dan Transmisi Gas
I.5.6.1. Klasifikasi dan Bahan Pipa. Pipa adalah suatu alat yang digunakan untuk transportasi fluida (cair, gas) dari suatu tempat ke tempat lainnya, atau dari suatu equipment ke equipment lainnya. Adapun berbagai jenis fluida yang dapat ditransport dengan pipa adalah :
a. Air b. Steam c. Gas
d. Udara
e. Minyak pelumas (oli) f. Larutan kimia (acid)
Selain itu pipa dapat digunakan sebagai saluran kabel listrik atau bagian konstruksi bangunan. Jenis-jenis pipa terdiri dari :
a.
Spiral Welding Pipeb.
Seamless Pipec.
Welded Piped.
Saw Pipee.
FWB Pipef.
C & W Pipeg.
EFW Pipeh.
ERW Pipei.
Lined Pipej.
Hosek.
Tubingl.
Pipe NippleI.5.6.2. Spesifikasi Pipa. Spesifikasi pipa adalah keterangan nilai pipa secara terperinci, antara lain berisi; bahan, sifat fisis, sifat kimia, proses pembuatan, ukuran, dan servis yang digunakan, dijelaskan dalam spesifikasi. Semua jenis pipa yang pakai di kilang-kilang memiliki spesifikasi tersendiri. Begitu juga jenis lainnya yang banyak beredar dipasaran. (Raswari, 2010)
Spesifikasi pipa ditunjukkan dengan kode alpanumerik yang didalamnya tercantum standard pembuatan dan pemakaian. Standard pipa merupakan ketetapan yang telah ditetapkan oleh para ahli, dan merupakan hal mendasar yang harus dipenuhi oleh pabrik dalam memproduksi pipa. Oleh karena itu pipa harus selalu dibuat dengan mengikuti standard yang baku.
Beberapa standard pipa yang ada dan digunakan, antara lain :
a.
ASTM (American Society for Testing and Materials)b.
ANSI (American National Standard Institute)c.
ASME (American Society Mechanical Engineer)d.
API (American Petroleum Institute)e.
ANWA (American Nations Work Association)f.
BS (British Standard)g.
JIS (Japanese Industrial Standard)h.
DIN (Deufche Normen)i.
dllUmumnya dikilang-kilang, standard yang dipakai adalah standard Amerika seperti ASTM, ANSI, ASME, dan API.
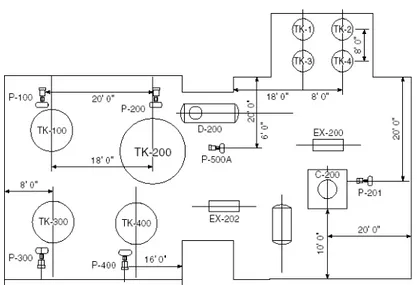
I.5.6.3 Gambar Piping Plan. Piping plan merupakan perencanaan jalur-jalur perpipaan beserta komponen serta kelengkapan secara efektif dan efisien. Pada umumnya piping plan merupakan gambaran umum jalur-jalur pipa saja baik di atas maupun di bawah tanah. (Raswari, 2007). Dalam piping plan telah menunjukkan judul gambar, unit daerah, kode-kode atau simbol simbol, standar, spesifikasi gambar, dimensi masing-masing bagian pipa, komunitas jalur perpipaan dan lain-lain
Gambar Piping plan disebut juga General Arrangement Drawing atau
Equipment Location Drawing. Gambar ini merupakan denah peralatan dalam suatu
area yang lebih kecil, atau pada lokasi tertentu dalam lingkungan pabrik, dan dilihat dari atas. Gambar Piping plan memperlihatkan tata letak peralatan yang sesungguhnya, yang dibatasi oleh garis batas area. Gambar ini harus memenuhi beberapa persyaratan, diantaranya :
b. Mudah untuk pengamanan kebakaran. c. Mudah untuk perbaikan.
d. Mudah untuk pengontrolan dan aman.
Gambar I.8 : Gambar Piping plan
Gambar1.8 merupakan gambar Piping Plan berfungsi sebagi informasi teknik, sehingga harus dapat dimengerti oleh pelanggan, konstruktor, konsultan, atau bagian perawatan dan perbaikan pabrik.
I.5.6.4. Process and Instrument Drawings (P&ID). Gambar merupakan unsur penting sebagai alat komunikasi, rancangan yang sangat rumit tidak dapat diinformasikan secara verbal, melalui gambar itulah cara yang yang paling efisien. Dalam gambar Teknik Perpipaan, ada 2 jenis gambar yang sangat dominan diterapkan untuk mengungkap rencana teknis sebagai pedoman rencana kerja dan gambaran proses.
Dua jenis gambar yang dimaksud adalah : a. Gambar Ortoghrafik
b. Gambar Isometrik
Jenis dokumen yang paling penting untuk pekerjaan dilapangan adalah Piping
And Instrument Drawings (P&ID) gambar-gambar P&ID sering disebut juga Process
rancangan dan operasi kelompok teknik lapangan. P&ID dibuat sebagai master plan instalasi kilang.
Piping and Instrument Diagram (P&ID) adalah sebuah master plan dari suatu
instalasi kilang yang memuat instruksi-instruksi umum bagi penggambaran (Raswari, 2007). Dari master plan inilah model kilang dan seluruh penggambaran kontruksi dibuat, atau dengan kata lain P&ID adalah sebuah pedoman perencanaan dan operasi pada suatu pengilangan.
P&ID merupakan dokumen rumit yang dibuat sebagai petunjuk teknis,
sebagai bahan informasi aspek teknis. P&ID memuat informasi untuk keperluan pembuatan gambar; Flow diagram, proses pemipaan berikut Instrumentnya, Pemipaan utiliti berikut instrumennya, dimana seluruh gambar konstruksi dibuat mengacu pada P&ID.
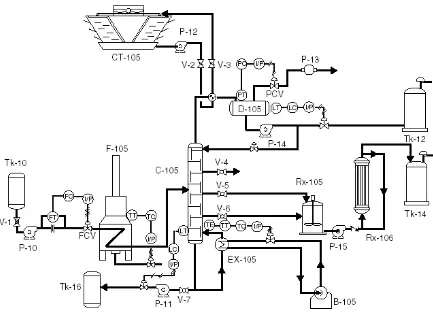
Gambar I.9 : Process and Instrument Drawings (P&ID).
Gambar I.9 merupakan gambaran mengenai P&ID suatu proses petunjuk teknis yang disertai dengan symbol-simbol di dalamnya. Simbol mengenai perpipaan terlampir di lampiran D.