Makalah Seminar Tugas Akhir
Aplikasi Jaringan Syaraf Tiruan RBF (Radial Basis Fuction) pada Plant Pengaturan Level Cairan Berbasis Mikrokontroler
ATmega32
Wahyu Nur Priyanto[1], Wahyudi, S.T, M.T [2], Iwan Setiawan, S.T, M.T [2] Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro
Jln. Prof. Sudharto, Tembalang, Semarang, Indonesia Abstrak
Pengendalian plant yang parameternya tidak diketahui dapat dilakukan dengan menggunakan kendali cerdas yaitu dengan menggunakan jaringan saraf tiruan sebagai komponen kendali sistem. Jaringan syaraf tiruan ini pada dasarnya adalah fungsi pemetaan masukan keluaran sistem yang bebas model matematis. Jaringan syaraf tiruan dibangun pada awalnya dengan tujuan untuk meniru secara fungsional mekanisme kerja otak manusia dalam menyimpan, belajar dan mengambil kembali pengetahuan yang tersimpan dalam sel syaraf atau neuron.
Pada tugas akhir ini dilakukan pengujian terhadap jaringan syaraf tiruan RBF untuk mengendalikan ketingian level cairan. Pengendalian dilakukan dengan mengatur tegangan sumber yang masuk ke pompa yang dilakukan dengan mengatur sudut tunda pemicuan TRIAC. Pengujian dilakukan pada pengaruh nilai gain proporsional, laju konvergensi, jumlah fungsi basis, pengujian referensi naik, referensi turun dan pemberian gangguan.
Plant pengendalian level cairan menggunakan mikrokontroler ATmega32 sebagai kontroler dan pompa sebagai aktuator, merupakan plant uji untuk modul kendali jaringan syaraf tiruan RBF. Pada pengujian didapatkan hasil semakin besar laju konvergensi dan gain proporsional yang diberikan, membuat waktu naik dan waktu penetapannya semakin cepat. Semakin banyak fungsi basis yang digunakan akan memperkecil overshoot pada sistem. RBF memiliki respon yang cukup baik pada pengujian perubahan referensi dan ketika sistem diberi gangguan, tanggapan keluaran akan tetap terjaga dalam kestabilan.
Kata kunci : Jaringan Syaraf Tiruan, RBF, mikrokontroler ATmega32.
I. PENDAHULUAN
1.1 Latar Belakang
Sekarang ini dunia teknologi industri terus berkembang dalam berbagai aspek salah satunya dibidang teknologi sistem kontrol. Padahal pada umumnya di dunia industri masih dijumpai kontroler yang sifatnya konvensional. Oleh karena itu, sangat dibutuhkan sistem kontrol yang baik untuk dapat menunjang berjalannya proses industri dengan maksud meningkatkan efisiensi dalam proses produksi. Sebagai contoh, otomatisasi dalam bidang industri yaitu proses pengaturan level cairan, pengisian atau pembuangan cairan dalam tangki.
Sebuah pendekatan dalam pengendalian
plant yang parameternya tidak diketahui dapat
dilakukan dengan menggunakan kendali cerdas yaitu dengan menggunakan jaringan saraf tiruan sebagai komponen kendali sistem. Jaringan syaraf tiruan ini pada dasarnya adalah fungsi pemetaan masukan keluaran sistem yang bebas model matematis. Jaringan syaraf tiruan dibangun pada awalnya dengan tujuan untuk meniru secara fungsional mekanisme kerja otak manusia dalam menyimpan, belajar dan mengambil kembali pengetahuan yang tersimpan dalam sel syaraf atau
neuron. Sistem kendali jaringan syaraf tiruan yang
dipergunakan yaitu memakai model Fix
Stabilising Controller yang pernah diusulkan oleh
Kraft G tahun 1990 secara on line.[2] Bentuk
jaringan syaraf tiruan yang dipergunakan adalah
Radial Basis Function (RBF) digunakan sebagai
komponen pengendali motor AC dengan parameter yang tidak diketahui. Dalam hal ini memakai metode dua masukan dengan satu keluaran.
Pada tugas akhir ini dirancang suatu sistem pengendalian level cairan dengan memanfaatkan mikrokontroler Atmega32 sebagai kontroler, dan kendali jaringan syaraf tiruan RBF dengan struktur kendali fixed stabilizing controller akan
melakukan koreksi sinyal kesalahan secara terus menerus sehingga menghasilkan sinyal kontrol yang mampu membuat keluaran plant sesuai
dengan referensi.
1.2 Tujuan Penulisan
Tujuan penyusunan Tugas Akhir ini adalah mengatur ketinggian cairan pada tangki penampung dengan jaringan Syaraf Tiruan Radial
Basis Function model pembelajaran Fixed
Stabilising Controllers berbasis mikrokontroler
Atmega32.
1.3 Pembatasan Masalah
Dalam Tugas Akhir ini diberikan pembatasan - pembatasan sebagai berikut :
1. Pengendalian dengan Jaringan Syaraf Tiruan
Radial Basis Function (RBF) ini tidak
dibandingkan dengan metode lain.
2. Penentuan kinerja sistem terbaik berdasarkan waktu penetapan.
3. Mikrokontroler Atmega32 digunakan sebagai kontroler, sedangkan digunakan PC
(Personal Computer) sebagai monitoring.
4. Pengendalian ketinggian dilakukan dengan mengatur tegangan pompa.
5. Bahasa pemograman yang digunakan pada mikrokontroler adalah dengan menggunakan bahasa C sedangkan program yang digunakan dalam proses monitoring adalah Microsoft Visual Studio 2010.
6. Pengujian dilakukan pada pengaruh laju konvergensi, gain proporsional, jumlah fungsi
basis, perubahan referensi ketinggian dan
pemberian gangguan.
7. Plant yang digunakan mempunyai spesifikasi
pompa dengan debit keluaran 6500 l/h, pipa masukan dengan diameter ½ inci, valve
keluaran utama dengan diameter ½ inci, dan
valve gangguan dengan diameter ½ inci.
II. DASAR TEORI
2.1 Jaringan Syaraf Tiruan RBF
RBF (φ) merupakan fungsi dimana keluarannya simetris terhadap center c tertentu
atau dinyatakan sebagai φc = φ ||x - c||, dimana || . || merupakan vektor normal. Jaringan syaraf yang dibentuk dengan menggunakan fungsi basis
berupa fungsi basis radial dinamakan Jaringan
Syaraf RBF.
Jaringan RBF terdiri atas 3 layer yaitu input layer, hidden layer (unit tersembunyi) dan output
layer.[9] Masing–masing unit tersembunyi
merupakan fungsi aktifasi yang berupa fungsi
basis radial. Fungsi basis radial ini diasosiasikan
oleh lebar dan posisi center dari fungsi basis
tersebut. Struktur dasar jaringan RBF dapat dilihat pada Gambar 1. 1 ϕ 2 ϕ n ϕ ∑
Gamba 1 Struktur dasar jaringan syaraf RBF Setiap input dari jaringan syaraf tiruan RBF
ini akan mengaktifkan semua fungsi basis pada
hidden layer. Setiap unit dari hidden layer
merupakan fungsi aktifasi tertentu yang disebut sebagai fungsi basis. Di dalam hidden layer
terdapat sejumlah fungsi basis yang sejenis.
Setiap fungsi basis akan menghasilkan sebuah
keluaran dengan bobot tertentu. Output jaringan
ini merupakan jumlah dari seluruh output fungsi
basis dikalikan dengan bobot masing-masing.
Untuk jaringan RBF dengan 2 masukan, proses pemetaannya dapat dilihat pada Gambar 2.
22 * 11 21 * 11 ϕ ϕ ϕ ϕ 22 * 12 21 * 12 2 * 11 ϕ ϕ ϕ ϕ ϕ ϕ n 22 * 1 21 * 1 2 * 12 ϕ ϕ ϕ ϕ ϕ ϕ n n n n n* 2 1 ϕ ϕ ∑ 1 = ϕ 11 ϕ 12 ϕ 21 ϕ 22 ϕ n 1 ϕ n 2 ϕ
Gamba 2 Operasi jaringan syaraf RBF dengan 2 masukan
Setiap masukan akan mengaktifkan setiap fungsi basis pada jaringannya sendiri.
Misalkan pada operasi masukan [x1 x2]. Setiap masukan akan mengaktifkan fungsi basis pada
jaringan RBF, sehingga masukan x1 akan mengaktifkan fungsi basisφ11, φ12, sampai φ1n.
Masukan x2 akan mengaktifkan fungsi basisφ21, φ22, sampai φ2n. Pada hidden layer terjadi
korelasi silang antara setiap fungsi basis jaringan
RBF pertama dan jaringan RBF kedua. Masing– masing hasil korelasi silang diboboti dengan bobot tertentu yaitu w11,w12, sampai wnn. Keluaran jaringan RBF dihitung dengan menjumlahkan seluruh hasil perkalian antara keluaran tiap fungsi basis dengan bobotnya
sendiri ditambah dengan bobot bias (wb).
2.2 Struktur Jaringan RBF
Radial basis function (RBF) memiliki
jaringan yang tidak begitu kompleks, yaitu : input layer, hidden layer, dan output layer.
A Input layer
Input layer adalah bagian dari rangkaian
jaringan syaraf tiruan RBF sebagai masukan untuk melakukan proses pertama. Input layer ini
membaca data dari faktor luar yaitu keluaran plant
(unit sensor) dan nilai yang kita kehendaki (referensi). Di input leyer ini tidak memiliki
algoritma khusus, tetapi hanya sebagai suplemen terhadap layer berikutnya. Tahap awal ini
ditentukan sebagai identifikasi sebelumnya.
B Hidden Layer
Pada bagian ini terjadi aktifitas perumusan dalam pembentukan sistem algoritma yang digunakan dalam jaringan RBF. Layer (lapisan)
kedua adalah lapisan tersembunyi dari dimensi yang lebih tinggi, yang melayani suatu tujuan pada fungsi basis dan bobotnya dengan nilai yang
berbeda. Pada bagian hidden layer terjadi proses
aktifasi fungsi basis dan korelasi silang masing–
masing fungsi basis.
Pada hidden layer ini selain memuat bobot
juga memuat fungsi basis. Pada jaringan RBF
fungsi basis ini identik dengan dengan fungsi
gaussian yang diformulasikan pada persamaan
2.1.[2] 2 2 2d x c j j
e
− −=
ϕ
…..………...….…….(1) Dimana :c = Center fungsi gausiaan
d = Lebar fungsi gausiaan
xj = Masukan ke j
φj = Keluaran fungsi basis oleh adanya masukan xj Secara grafis fungsi ini digambarkan seperti pada Gambar 3.
Gambar 3 Fungsi Gaussian
Pada jaringan biasanya digunakan lebih dari 1 buah fungsi basis. Tiap – tiap fungsi basis
mempunyai 1 center dan 1 bobot tertentu
sehingga jumlah center dan bobot memori yang
digunakan sama dengan jumlah fungsi basis yang
digunakan. Untuk n buah membership function
pada jaringan maka diperlukan bobot memori sebesar n x jumlah fungsi basis yang digunakan
pada satu jaringan.
C Output layer
Hasil dari penjumlahan dari perkalian antara bobot dengan fungsi basis akan menghasilkan
keluaran yang disebut output layer. Output layer
merespon dari jaringan sesuai pola yang diterangkan pada input layer. Pada jaringan syaraf
RBF bentuk dan formasi sesuai dengan jaringan syaraf tiruan standar Skema dasar jaringan syaraf tiruan RBF dapat dilihat pada Gambar 4.
Gambar 4. Jaringan syaraf tiruan dengan 3 lapisan Pada Gambar 4 merupakan skema dasar dari perumusan algoritma dari RBF yang terletak pada daerah hidden layer. X1, X2 ….Xp
merupakan input, algoritma RBF terbentuk
ditengah, W1, W2 …Wn merupakan bobot yang ada. Hasil dari keluaran RBF adalah hasil penjumlahan dari perkalian bobot dan fungsi
basis.
2.3 Algoritma LMS
Algoritma LMS merupakan salah satu algoritma yang digunakan untuk pembelajaran atau pembaharuan bobot jaringan. Algoritma LMS mempunyai komputasi sederhana dengan melakukan proses untuk mengoreksi bobot–bobot jaringan yang akhirnya akan meminimalkan fungsi rata–rata kuadrat error. Secara matematis
algoritma LMS untuk pembaharuan bobot jaringan syaraf dituliskan pada persamaan 2.2. [5]
(
( ) ( ))
*x * 2 w wk+1 = k +μ
d k − y k ……..….(2) Dimana : 1 kw + : bobot pada cacah ke k+1
k
w : bobot pada cacah ke k
μ
: laju konvergensi (0<μ
<1) x: masukan (fungsi basis)(
d(k)−y(k))
: sinyal kesalahan2.4 Strategi Pembelajaran Bobot
Beberapa strategi pembelajaran pada jaringan RBF ini antara lain :
1. Posisi center pada fungsi basis
2. Lebar dari fungsi basis
3. Bobot keluaran setiap fungsi basis
Pada tugas akhir ini strategi pembelajaran yang digunakan adalah pembaharuan bobot keluaran tiap fungsi basis.
2.5 Algoritma Pelatihan RBF
Algoritma pelatihan RBF secara iteratif memiliki langkah – langkah sebagai berikut : Langkah 1 :Menentukan jumlah fungsi basis yang
akan digunakan.
Langkah 2 :Menentukan center tiap fungsi basis.
Langkah 3 :Menyediakan bobot sebanyak (fungsi
basis)n + 1, dimana n adalah jumlah
masukan jaringan syaraf tiruan RBF. Langkah 4 :Inisialisasi bobot w = [0 0 0 . . . 0],
masukan laju konvergensi yang digunakan ( 0 < α <1).
Langkah 5 :Untuk setiap sinyal latih kerjakan langkah 6 – selesai.
Langkah 6 :Hitung keluaran tiap fungsi basis.
Langkah 8 :Hitung kesalahan (error) antara sinyal
terharap (d) dengan keluaran RBF y
error = d – y.
Langkah 9 :Update bobot-bobot tiap fungsi basis
dan bobot basis dengan metoda LMS.
2.6 Fixed Stabilising Controllers
Fix Stabilising Controlle merupakan
salah satu arsitektur kendali adaptif yang diusulkan oleh Miller pada tahun 1987 dan Kraft pada tahun 1990[2]. Blok diagram kendali dengan skema Fix Stabilising Controller dapat dilihat
pada Gambar 5.
Gambar 5. Diagram kotak pengendalian dengan jaringan syaraf secara on- line: metode fixed stabilising
controllers
2.7 Plant Pengendalian Level Cairan
Untuk plant pengendalian level cairan ini
secara garis besarnya dapat dilihat pada Gambar 6. Perangkat keras meliputi sistem mikrokontroler berfungsi sebagai pengendali, unit masukan dan PC sebagai monitoring. Keluaran level ketinggian ditampilkan pada licuid crystal display (LCD).[7]
pompa V-1 Tank 1 Tank 2 PING PELAMPUNG Tank 3 utama PC LCD KEYPAD Kendali tegangan AC dengan zero crossing gangguan
Gambar 6 Perangkat keras pengendalian level ketinggian cairan.
2.8 Rangkaian sistem minimum
Mikrokontroler Atmega32
Sistem mikrokontroler digunakan sebagai unit kendali utama yang didalamnya berisi program untuk mengendalikan proses pengaturan pompa (pump), termasuk pengesetan parameter,
pengaturan tampilan LCD, pengaturan data serial
dan input clock sensor PING, kendali jaringan
syaraf tiruan RBF serta mengatur aliran data komunikasi serial melalui RS232 dengan
komputer untuk proses monitoring. Secara umum alokasi penggunaan port pada rangkaian
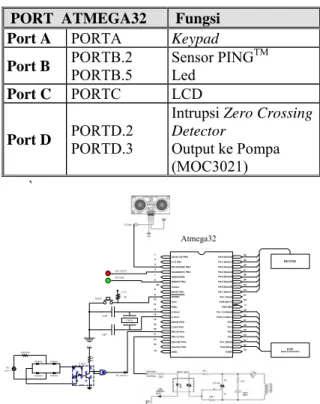
Atmega32dilihat pada Tabel 1 dan Gambar 7.[7] Tabel 1 Penggunaan port pada ATmega32.
PORT ATMEGA32 Fungsi
Port A PORTA Keypad
Port B PORTB.2 PORTB.5 Sensor PING
TM Led
Port C PORTC LCD
Port D PORTD.2 PORTD.3
Intrupsi Zero Crossing Detector
Output kePompa (MOC3021) `
10 K
Gambar 7 Alokasi port pada sistem minimum mikrokontroler Atmega32.
3.1 Perancangan Kendali Jaringan Syaraf
Tiruan RBF
Perancangan kendali RBF dilakukan untuk merancang jaringan RBF yang akan digunakan. Perancangan jaringan RBF meliputi perancangan fungsi basis yang digunakan dan perancangan
algoritma kontrol RBF yang akan diimplementasikan pada mikrokontroler. Sistem kendali jaringan syaraf RBF secara keseluruhan diperlihatkan pada Gambar 8.
22 * 11 21 * 11 ϕ ϕ ϕ ϕ 22 * 12 21 * 12 2 * 11 ϕ ϕ ϕ ϕ ϕ ϕ n 22 * 1 21 * 1 2 * 12 ϕ ϕ ϕ ϕ ϕ ϕ n n n n n* 2 1 ϕ ϕ ∑ 1 = ϕ 11 ϕ 12 ϕ 21 ϕ 22 ϕ n 1 ϕ n 2 ϕ n n 2 1 22 12 21 11 ϕ ϕ ϕ ϕ ϕ ϕ = = =
Gambar 8 Diagram blok jaringan syaraf RBF
3.1.1 Penentuan Nilai Gain Proporsional
Penentuan besarnya gain proporsional
secara praktis dibatasi oleh jangkauan sinyal kendali maksimum. Diusahakan sinyal kendali proporsional pada kondisi awal tidak melebihi 100, karena keluaran maksimum dari kendali jaringan syaraf RBF adalah 100.
3.1.2 Penentuan Nilai Laju Konvergensi
Pemilihan besarnya laju konvergensi yang digunakan pada pengendalian dilakukan secara empiris dan tidak boleh terlalu besar karena hal ini dapat menyebabkan ketidakstabilan sistem keluaran plant. Pada tugas akhir ini laju
konvergensi yang digunakan pada range 0 sampai
1.
3.1.3 Penentuan jumlah fungsi basis pada jaringan RBF
Dengan mempertimbangkan besarnya memori yang dimiliki mikrokontroler AVR ATmega32 diperoleh jumlah fungsi basis
maksimal adalah 10 karena banyaknya jumlah fungsi basis berpengaruh pada penggunaan
memori pada mikrokontroler.
3.1.4 Perancangan Algorima Kontrol
Jaringan Syaraf Tiruan RBF
Tahap pertama yang perlu dilakukan pada perancangan algoritma kontrol jaringan syaraf tiruan RBF adalah merancang jaringan yang akan digunakan. Proses perancangan jaringan RBF yang akan digunakan diperlihatkan pada Gambar 9.
Gambar 9 Diagram alir perancangan jaringan RBF Proses perancangan jaringan RBF jumlah fungsi basis menentukan besarnya nilai center dan
deviasi yang digunakan dalam perhitungan
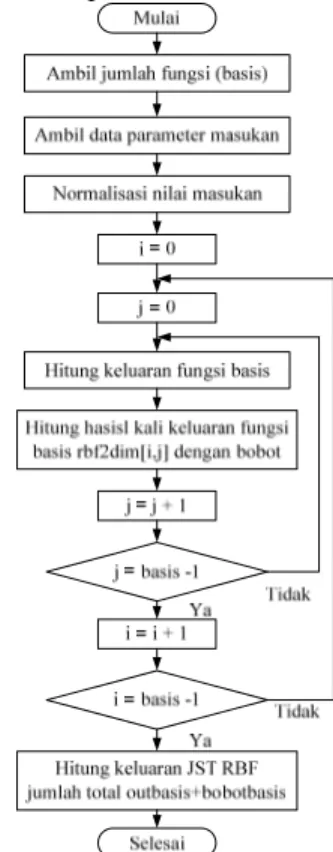
keluaran RBF. Algoritma untuk menghitung keluaran jaringan RBF 2 masukan diperlihatkan oleh diagram alir pada Gambar 10.
Gambar 10 Diagram alir perhitungan keluaran RBF 2 dimensi
Aplikasi algoritma kontrol jaringan syaraf tiruan RBF secara keseluruhan ditunjukan oleh diagram alir pada Gambar 11. Proses kontrol diawali dengan setting parameter jaringan RBF yang meliputi jumlah fungsi basis yang
digunakan, gain proporsional dan laju
konvergensi jaringan.
3.2 Perancangan Program Utama
Perancangan perangkat lunak program utama ini secara garis besar bisa dilhat pada Gambar 12 diagram alir program utama. Perancangan program bertujuan untuk mengatur kerja sistem seperti inisialisasi register I/O dan
variabel, scanning keypad, memilih kontroler,
setting parameter, pembacaan hasil sensor, proses
perhitungan jaringan syaraf tiruan RBF.
Gambar 12 Diagram alir program utama.
IV. PENGUJIAN dan ANALISIS
4.1 Pengaruh Perubahan Gain Proporsional
Beberapa hasil pengujian Pengaruh Perubahan Gain Proporsional Terhadap Transien
Ketinggian Level Cairan ditunjukan pada Gambar 13, dan Gambar 14.
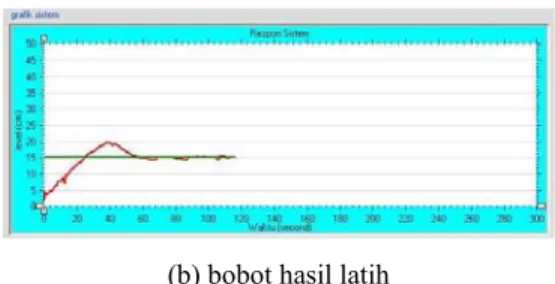
Gambar 13. Respon transien kendali RBF untuk referensi 15 cm dengan gain proporsional 0,2
Gambar 14. Respon transien kendali RBF untuk referensi 15 cm dengan gain proporsional 0,8
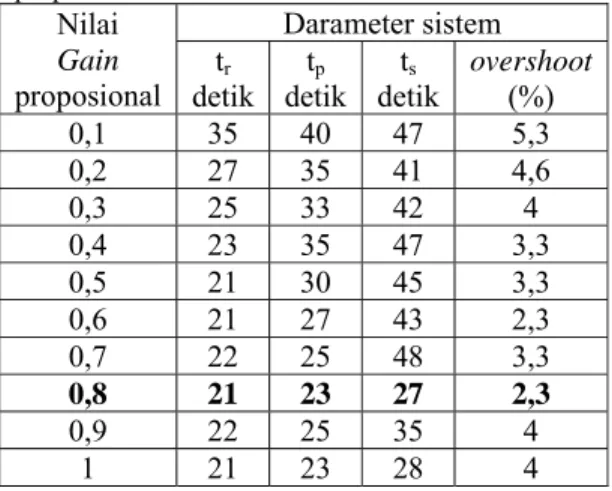
Data parameter unjuk kerja pada pengujian ini diperlihatkan pada Tabel.1.
Tabel 2. Data parameter unjuk kerja sistem pada referensi 15 cm terhadap perubahan nilai gain proporsional Nilai Gain proposional Darameter sistem tr detik tp detik ts detik overshoot(%) 0,1 35 40 47 5,3 0,2 27 35 41 4,6 0,3 25 33 42 4 0,4 23 35 47 3,3 0,5 21 30 45 3,3 0,6 21 27 43 2,3 0,7 22 25 48 3,3 0,8 21 23 27 2,3 0,9 22 25 35 4 1 21 23 28 4
4.2 Pengaruh Perubahan laju konvergensi
Beberapa hasil pengujian Pengaruh Perubahan laju konvergensi Terhadap Transien Ketinggian Level Cairan ditunjukan pada Gambar 15, dan Gambar 16.
(a) bobot awal nol
(b) bobot hasil latih
Gambar 15. Respon transien kendali RBF untuk referensi 15 denagan konvergensi 0,3
(a) bobot awal nol
(b) bobot hasil latih
Gambar 16. Respon transien kendali RBF untuk referensi 15 dengan Laju konvergensi 0,8
Data parameter unjuk kerja pada pengujian pengaruh laju konvergensi diperlihatkan pada Tabel 3.
Tabel 3. Data parameter unjuk kerja sistem pada referensi 15 cm terhadap perubahan nilai laju konvergensi
Nilai LK
Bobot awal nol Bobot hasil latih tr tp ts Mp tr tp ts Mp 0,1 41 60 145 32,7 29 50 124 26 0,2 31 51 109 40,7 25 41 97 32 0,3 29 48 101 44 23 49 64 36 0,4 27 48 95 45,3 22 40 69 40 0,5 25 44 84 43,3 22 40 60 40 0,6 25 46 93 46,7 23 42 66 44 0,7 23 43 92 48,7 24 42 67 45 0,8 22 41 84 44 22 40 60 44 0,9 24 43 87 45,3 23 41 61 44 1 23 42 85 45,3 23 41 60 43
4.3 Pengaruh Perubahan Jmlah Fngsi Basis
Beberapa hasil pengujian Pengaruh Perubahan jumlah fungsi basis Terhadap Transien
Ketinggian Level Cairan ditunjukan pada Gambar 17, dan Gambar 18.
(a) bobot awal nol
(b) bobot hasil latih
Gambar 17. Respon transien kendali jumlah fungsi basis 3
(a) bobot awal nol
Gambar 18. Respon transien kendali RBF jumlah fungsi basis 8
(b) bobot hasil latih
Gambar 18. Respon transien kendali RBF jumlah fungsi basis 8 {lanjutan)
Data parameter unjuk kerja pada pengujian pengaruh jumlah fungsi basis diperlihatkan pada
Tabel 4.
Tabel 4. Data parameter unjuk kerja sistem pada referensi 15 cm terhadap perubahan jumlah fungsi basis
Jumlah fungsi
basis
Bobot awal nol Bobot hasil latih tr tp ts Mp tr tp ts Mp 2 25 52 219 56,7 24 43 127 45,3 3 25 48 118 52,6 22 40 78 42 4 26 48 96 50 23 41 67 43,3 5 25 44 85 44 22 40 63 40,7 6 27 47 85 44 25 41 73 37,3 7 27 46 79 40 23 38 57 32,7 8 28 45 76 26,5 24 38 59 30,7 9 32 50 85 36 30 48 67 35,3 10 32 49 96 35,3 32 48 68 32,6
4.4 Pengaruh Perubahan Referensi Naik dan
Referensi Turun
Pengujian dilakukan dengan parameter jaringan RBF sebagai berikut laju konvergensi 0,5
gain proporsional 0,8 dan jumlah fungsi basis 8.
Hasil pengujian referensi naik dapat dilihat pada Gambar 19
(a) Bobot awal nol
(b) Bobot Hasil Latih
Gambar 19. Respon Pengujian Referensi naik kendali RBF
Data parameter dari hasil percobaan referensi naik seperti pada Tabel 5.
Tabel 5. Data parameter unjuk kerja sistem terhadap perubahan nilai referensi naik
Parameter unjuk kerja
Laju konvergensi = 0,5
Gain proporsional = 0,8
Jumlah basis = 8
Bobot awal nol Bobot hasil latih Ketinggian 10cm – 16cm 16cm-20cm 10cm – 16cm 16cm-20cm Waktu naik detik 14 detik 13 detik 11 detik 11
Waktu stabil 60 detik 70 detik 37 detik 56 detik Overshoot 51,6 % 67,5 % 28,3 % 45 %
Pengujian dilakukan dengan parameter jaringan RBF sebagai berikut laju konvergensi 0,5
gain proporsional 0,8 dan jumlah fungsi basis 8.
Hasil pengujian referensi naik dapat dilihat pada Gambar 20 dan data parameter unjuk kerja pada Tabel 6.
(a) Bobot awal nol
(b) Bobot hasil latih
Gambar 20. Respon Pengujian Referensi turun kendali RBF
Tabel 6. Data parameter unjuk kerja sistem terhadap perubahan nilai referensi tutun
Parameter unjuk kerja
Laju konvergensi = 0,5
Gain proporsional = 0,8
Jumlah basis = 8
Bobot awal nol Bobot hasil latih Ketinggian 20cm – 15cm 15 cm – 10cm 20cm – 15cm 15 cm – 10cm waktu stabil 69 detik 19 detik 45 detik 15 detik
4.4 Pengaruh Gangguan Terhadap Respon
Sistem
Pada saat pengujian digunakan referensi ketinggian 15 cm dengan nilai gain proporsional
0,8 laju konvergensi 0,5 dan jumlah basis 8.
Setelah respon mencapai nilai referensi selanjutnya diberikan gangguan berupa pembukaan valve ganggguan. Setelah kondisi
stabil valve utama ditutup kemudian valve utama
dibuka kembali setelah kondisi sistem stabil. Hasil pengujian pemberian gangguan diperlihatkan pada Gambar 21.
(a) Bobot awal nol
(b) Bobot hasil latih
Gambar 21. Respon pengujian pemberian gangguan kendali RBF
BAB V PENUTUP
5.1 Kesimpulan
Setelah dilakukan perancangan, pembuatan, pengujian dan penganalisaan teknik kendali jaringan syaraf tiruan RBF dengan struktur kendali fixed stabilizing controller, proses
pengaturan ketinggian cairan pada tangki penampung, maka dapat diambil kesimpulan sebagai berikut :
1. Kestabilan respon keluaran ketinggian level cairan akan sangat tergantung terhadap pemilihan parameter-parameter kendali yaitu:
- Besarnya laju konvergensi
berpengaruh semakin besar nilai laju konvergensi yang digunakan maka semakin cepat waktu yang dibutuhkan untuk mencapai kestabilan akan tetapi respon transien akan mengalami
overshoot yang semakin besar.
- Besarnya gain proporsional
berpengaruh semakin tinggi nilai gain
yang digunakan maka semakin cepat waktu yang dibutuhkan untuk mencapai referensi.
- jumlah fungsi basis berpengaruh
semakin besar jumlah fungsi basis
akan mempercepat waktu yang dibutuhkan untuk mencapai kestabilan dan memperkecil
overshoot pada respon sistem.
2. Plant pengendalian ketinggian level
caiaran jaringan syaraf tiruan RBF dengan nilai gain proporsional 0,8, laju
konvergensi 0,5 dan jumlah fungsi basis 8
dapat untuk mengatasi gangguan yang diberikan.
3. Pada pengujian transien sistem dengan posisi valve utama terbuka penuh, respon
keadaan tunak dan waktu naik terbaik dengan menggunakan parameter gain
proporsional 0,8 laju konvergensil 0,5 dan jumlah fungsi basis 8.
5.2 Saran
Pada pengembangan sistem lebih lanjut ada beberapa saran yang dapat dilakukan yaitu sebagai berikut:
1 Untuk penelitian pengendalian dengan menggunakan jumlah fungsi basis yang
lebih besar dapat menggnakan mikrokontroler yang memiliki memori lebih besar.
2 Dapat dilakukan pengendalaian level cairan dengan metode gain scheduling
dan MRAC.
DAFTAR PUSTAKA
[1] Andrianto, Hari, Pemograman
Mikrokontroler AVR ATMEGA16 Menggunakan Bahasa C (Code Vision AVR), Informatika, Bandung, 2008.
[2] Brown, Martin and Harris, Neurofuzzy
Adaptive Modelling and Control, Prentice
Hall Inc, 1994
[3] Dani, Agus, Tugas Akhir: Aplikasi Jaringan Syaraf Tiruan RBF (Radial Basis Function) Untuk Pengendalian Kecepatan Motor Induksi Tiga Fasa Secara On-Line
Mikrokontroler ATMega 8535, Universitas
Diponegoro, Semarang, 2007.
[4] Hariyanto, Tugas Akhir: Aplikasi Jaringan Syaraf Tiruan RBF (Radial Basis Function) Pada Sistem Kontrol Valve Untuk Pengendalian Tinggi Muka Cairan Secara
On-Line, Universitas Diponegoro,
Semarang, 2007.
[5] Haykin, Simon, Neural Nerworks- A
Comprehensive Foundation, Macmillan
Colege-Publishing Company Inc, New York. 1994.
[6] Kusumadewi, Sri, Artificial Inteligence.
GRAHA ILMU Yogyakarta, 2003.
[7] Tigor, Eduward, Tugas Akhir: Tuning Parameter Proporsional-Integral Dengan FL (Fuzzy Logic) Untuk Pengaturan Level
Air Berbasis Mikrokontroler ATMega 8535,
Universitas Diponegoro, Semarang, 2008. [8] Widrow B, Stearns S D, Adaptive Signal
Processing, Prentice hall, New Jersey. 1985
[9] Winoto, Ardi, Mikrokontroler AVR ATmega8/32/16/8535 dan Pemograman dengan Bahasa C pada WinAVR ,Informatika, Bandung, 2008
[10] ………,www.data2money.com/PDF/R BFpaper.pdf
Wahyu Nur Priyanto (L2F 307 051)
Lahir di Brebes 22 September 1984. Saat ini sedang melanjutkan studi pendidikan strata I di Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro Konsentrasi Kontrol.
Mengetahui dan mengesahkan, Dosen Pembimbing I Wahyudi, ST, MT NIP. 196906121994031001 Tanggal:____________ Dosen Pembimbing II Iwan Setiawan, ST, MT NIP. 197309262000121001 Tanggal: ___________