BAB 2
LANDASAN TEORI
2.1. Scaling dan Root Planing
Scaling dan root planingadalah proses membuang plak dan karang gigi yang dapat
menyebabkan inflamasi untuk memulihkan kesehatan gusi secara menyeluruh. Scaling adalah proses dimana plak dan karang gigi dibuang dari permukaan supragingiva (bagian atas gusi) dan subgingiva (bagian bawah gusi), sementara root planing adalah proses dimana sisa karang gigi yang berada di sementum dikeluarkan dari akar gigi untuk menghasilkan permukaan gigi yang halus, keras, dan bersih. Scaling dan root planing bukan merupakan dua prosedur yang terpisah; keduanya termasuk dalam
perawatan periodontal dasar (Dibart, 2010).
Peralatan yang digunakan pada proses scaling dan root planing disebut scaler. Ada dua tipe scaler, yaitu scaler manual dan scaler ultrasonik. Scaler manual mengandalkan kekuatan tangan operator dalam pemakaiannya, sedangkan scaler ultrasonik menggunakan tenaga listrik. Scaler ultrasonik terbagi dua berdasarkan tipe gerakannya, yaitu magnetostictive (elips) dan piezoelectric(linear). Dewasa ini, pada umumnya praktisi kesehatan gigi menggunakan scaler ultrasonik karena lebih praktis, efektif, dan efisien dibandingkan dengan scaler manual (Kamath et al, 2013).
Gambar 2.2Scaler ultrasonik piezoelectric(Kamath et al, 2013).
Untuk melakukan scaling dan root planing, terdapat tahapan prosedur yang perlu dijalani secara bertahap. Tahapan prosedur tersebut adalah sebagai berikut. 1. Pemeriksaan kedalaman poket periodontal.
2. Deteksi karang gigi
Karang gigi, atau dalam istilah kedokteran disebut kalkulus (calculus), yaitu plak yang mengeras dan mengumpul di permukaan gigi. Karang gigi berwarna kekuningan dan sulit dihilangkan jika hanya dilakukan dengan menyikat gigi atau flossing. Ukuran, bentuk, dan lokasi karang gigi merupakan parameter yang perlu
diperhatikan saat pendeteksian karang gigi dilakukan. Ciri khas gigi yang mengandung karang gigi adalah permukaan gigi terasa kasar dan terdapat endapan kekuningan pada permukaannya.
3. Proses scaling dan root planing Proses ini terdiri dari:
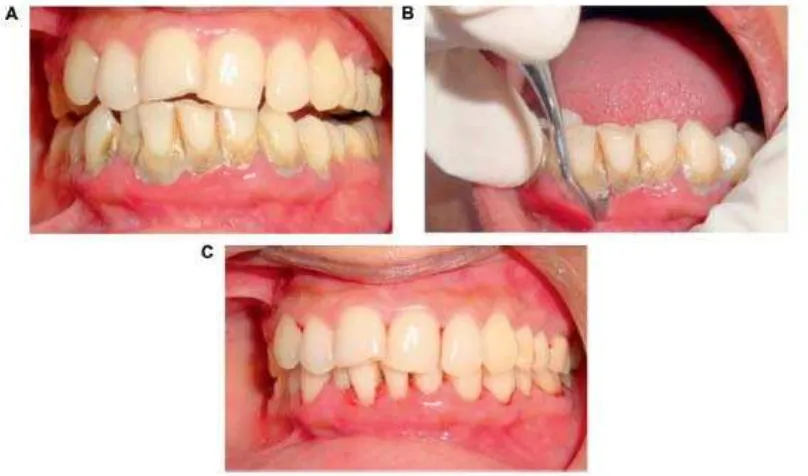
a. Scaling supragingiva: membersihkan karang gigi yang terdapat di bagian atas gusi, tepatnya pada mahkota gigi.
Gambar 2.4 Scaling supragingiva (Kamath et al, 2013).
b. Scaling subgingiva: membersihkan karang gigi yang terdapat di bagian bawah gusi, tepatnya pada akar gigi.
Gambar 2.5 Scaling subgingiva (Kamath et al, 2013).
2.2.Leap Motion Controller
Leap Motion Controller adalah alat sensor yang dikembangkan oleh Leap Motion Inc.
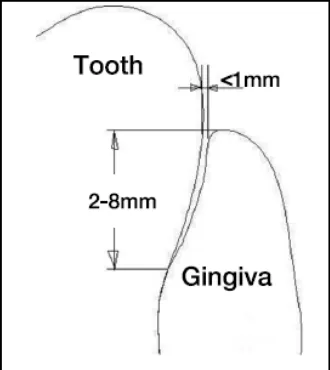
dan dirilis pertama kali pada bulan Juli 2013. Alat ini didesain khusus untuk mendeteksi posisi, gerakan, serta gestur dari tangan dan jari dengan akurasi sekitar 200µm.Alat ini memiliki area interaksi berbentuk piramida terbalik yang berpusat pada bagian tengah dan jarak operasi sekitar 25-600 mm di atas alat tersebut.
Gambar 2.6Leap Motion Controller (Nowicki et al, 2014).
framerate hampir 300 fps yang dikirim ke komputer melalui kabel USB (Kerefeyn et
al, 2015).
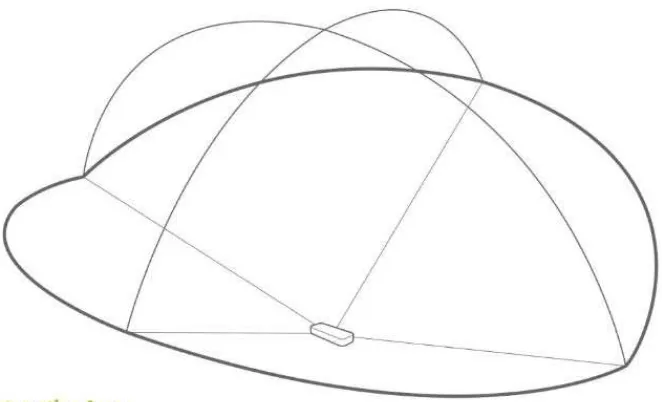
Gambar 2.8 Tampilan Skematik Leap Motion Controller (Weichert et al, 2013).
Data yang diperoleh dari pelacakan yang dilakukan oleh Leap Motion Controller berupa image hitam putih (grayscale). Data ini ditransfer melalui USB
untuk diproses oleh perangkat lunak Leap Motion Service. Rangkaian image tersebut kemudian dianalisis untuk membentuk representasi tiga dimensi dari apa yang terlihat oleh Leap Motion Controller. Algoritma tracking Leap Motion menerjemahkan data tiga dimensi tersebut dan diperolehlah informasi seperti posisi tangan dan jari. Leap Motion Service memberikan hasil akhir berupa serangkaian frame yang memuat data dari objek yang terlacak.
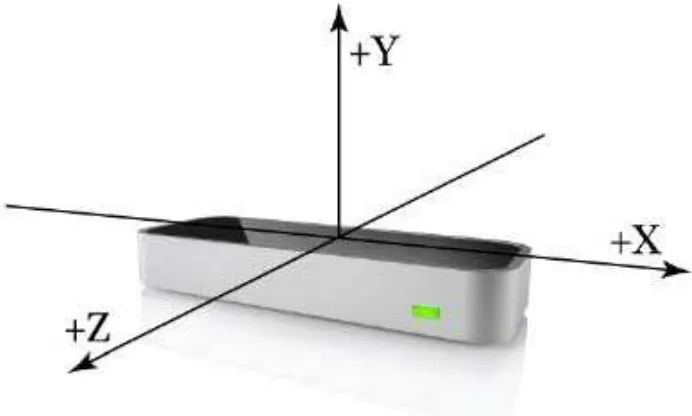
Alat ini bekerja dengan sistem koordinat Cartesian. Koordinat dihitung dalam satuan mm (milimeter) dan titik pusat sistem (titik 0) berada di bagian tengah alat tersebut. Koordinat-koordinat tersebut dikonversi ke dalam koordinat layar tergantung pada ukuran layar atau ukuran jendela aplikasi menggunakan persamaan:
screenX = ((leapX * WindowWidth * 2) / WindowWidth) + (WindowWidth / 2);
screenY = WindowHeight – leapY; (2.1)
Dimana WindowWidth dan WindowHeight merupakan lebar dan tinggi dari jendela aplikasi; leapX dan leapY merupakan posisi elemen (misal: jari) pada koordinat X dan Y area interaksi; screenX dan screenY adalah koordinat layar (Krastev et al, 2015).
Gambar 2.10Sistem Koordinat pada Leap Motion Controller (Krastev et al, 2015).
Leap Motion Controller diakses dan diprogram melalui Application
Programming Interfaces (API), dengan didukung oleh berbagai jenis bahasa
• Circle Gesture: gerakan jari membentuk lingkaran
Gambar 2.11Contoh Penggunaan Circle Gesture(Leap Motion, 2015).
• Swipe Gesture: gerakan tangan linear
Gambar 2.12Contoh Penggunaan Swipe Gesture(Leap Motion, 2015).
• Key Tap Gesture: gerakan jari seakan menekan tombol di udara
• Screen Tap Gesture: gerakan jari seakan menyentuh layar di udara
Gambar 2.14Contoh Penggunaan Screen Tap Gesture(Leap Motion, 2015).
2.3.Penelitian Terdahulu
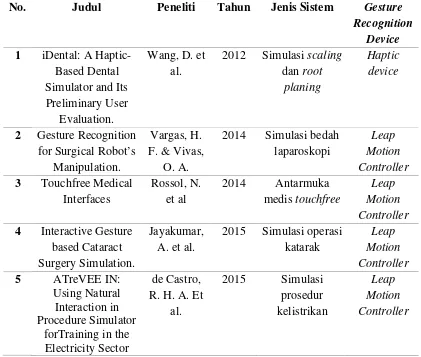
Wang et al. (2012) membuat iDental, sebuah dental simulator yang terfokus pada prosedur scaling dan root planing dengan menggunakan haptic device sebagai perangkat masukan. Hasil evaluasi menunjukkan bahwa penetrasi antara alat dan gigi akan sangat mengurangi ketepatan iDental. Oleh karena itu, perlunya memanfaatkan haptic device jenis 6-DOF yang digunakan pada penelitian ini dengan umpan balik
tenaga dan putaran pada dental simulatoragar simulasi menjadi lebih realistis.
Pada tahun 2014, Vargas & Vivas melakukan penelitian berupa simulasi bedah laparoskopi menggunakan dua jenis robot virtual yang dikendalikan melalui Leap Motion Controller. Robot jenis pertama, Lapbot, berjumlah dua, diletakkan di sebelah
kanan dan kiri pasien untuk menangani operasi; sedangkan sebuah robot jenis kedua, Hibou, berfungsi sebagai pengarah kamera internal.
Penelitian yang dilakukan oleh Rossol et al. (2014) memanfaatkan Leap Motion Controller sebagai alat pengenal gestur tangan dan alat bantu untuk
mengontrol visualisasi medis seperti USG. Antarmuka yang dikembangkan pada penelitian ini menggunakan satu set gestur yang didesain agar efektif baik untuk penggunaan tangan dan jari maupun alat bantu seperti jarum bedah atau stylus komputer.
Pada tahun 2015, de Castro et all membuat ATreVEE IN, sebuah simulasi prosedur kelistrikan dengan menggunakan Leap Motion Controller sebagai alat masukan yang mendeteksi gerakan tangan dan jari pengguna. Dengan menggunakan ATreVEE IN, pengguna dapat melakukan latihan prosedur kelistrikan tanpa perlu khawatir dengan risiko kecelakaan tinggi yang disebabkan oleh listrik yang kerap terjadi dalam kejadian nyata.
Rangkuman dari penelitian terdahulu dapat dilihat pada Tabel 2.1.
Tabel 2.1. Penelitian Terdahulu
No. Judul Peneliti Tahun Jenis Sistem Gesture Recognition
Device 1 iDental: A
Haptic-Based Dental
2012 Simulasi scaling dan root
planing
Haptic device
2 Gesture Recognition for Surgical Robot’s
Manipulation.
Vargas, H. F. & Vivas,
O. A.
2014 Simulasi bedah laparoskopi
Leap Motion Controller 3 Touchfree Medical
Interfaces 4 Interactive Gesture
based Cataract Surgery Simulation.
Jayakumar, A. et al.