INTISARI
Penelitian ini mengembangkan teknologi RFID untuk security system yakni membuat sistem keamanan suatu perumahan yang minim kesalahan dan juga lebih ketat dari sekedar pengamanan yang dilakukan oleh satpam. Dengan memanfaatkan teknologi RFID ditambah dengan sistem penyimpanan database, diharapkan penelitian ini akan menghasilkan suatu alat prototype berupa portal otomatis yang di pasang pada maket perumahan dan diuji dengan menggunakan mobil RC untuk mewakili mobil aslinya.
Prototype sistem keamanan portal perumahan berbasis RFID di buat dengan menggunakan 4 buah RFID reader yakni masing-masing 2 buah RFID ID-12 dan 2 buah RFID SL018, menggunakan 2 buah motor servo untuk menggerakkan palang portal serta menggunakan 2 buah rangkaian sensor photodiode untuk mendeteksi ada atau tidaknya mobil yang melewati portal dengan menggunakan kepekaan cahaya sensor.
ix
ABSTRACT
This research develop RFID technology to make a housing portal security system that errorless and more secure than safekeeping by the security guard. With harness RFID technology added with database system, expected that this research will bear a housing portal prototype and tested with remote control car to represent real car.
Prototype of housing portal security system based on RFID made with 4 RFID readers which is consist two types of readers each 2 RFID ID-12 and 2 RFID SL018, use 2 servo motors to move the portal and also use 2 photodiode sensors to detect the car with light sensors.
Based on testing, this research develop the prototype of housing portal security system based on RFID although unstable, use two kind of RFID reader posit their length ability to detect the tag that are RFID ID-12 and RFID SL018 whre the length detection of RFID ID-12 only ±3 cm and length detection of RFID SL018 about ±1cm from the anntena. Servo works opposite with the pulse that give and the degree that resulted, the photodiode sensor results a good length of detection, and the database system that made have a feature to add, save, change, and delete data that inputed by the user.
LAPORAN TUGAS AKHIR
SISTEM KEAMANAN PORTAL PERUMAHAN
BERBASIS RFID
Disusun Oleh:
Eleonora Anggi Ardaninggar 125114023
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT REPORT
HOUSING PORTAL SECURITY SYSTEM
BASED ON RFID
By:
Eleonora Anggi Ardaninggar 125114023
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
“ Segala sesuatu yang kamu kehendaki
supaya orang perbuat kepadamu,
perbuatlah demikian juga kepada mereka.”
–
Matius 7:12.
“Lakukan segala sesuatu
dari hati, karena
ketulusan akan selalu
berbuah baik.”
Karya ini kupersembahkan untuk...
Tuhan Yesus Kristus, Tuhan dan Penyelamatku
Bunda Maria, Ibuku yang baik hati
Mama dan Papa tercinta, untuk doa, waktu, dan dukungannya yang selalu diberikan
viii
INTISARI
Penelitian ini mengembangkan teknologi RFID untuk security system yakni membuat sistem keamanan suatu perumahan yang minim kesalahan dan juga lebih ketat dari sekedar pengamanan yang dilakukan oleh satpam. Dengan memanfaatkan teknologi RFID ditambah dengan sistem penyimpanan database, diharapkan penelitian ini akan menghasilkan suatu alat prototype berupa portal otomatis yang di pasang pada maket perumahan dan diuji dengan menggunakan mobil RC untuk mewakili mobil aslinya.
Prototype sistem keamanan portal perumahan berbasis RFID di buat dengan menggunakan 4 buah RFID reader yakni masing-masing 2 buah RFID ID-12 dan 2 buah RFID SL018, menggunakan 2 buah motor servo untuk menggerakkan palang portal serta menggunakan 2 buah rangkaian sensor photodiode untuk mendeteksi ada atau tidaknya mobil yang melewati portal dengan menggunakan kepekaan cahaya sensor.
ABSTRACT
This research develop RFID technology to make a housing portal security system that errorless and more secure than safekeeping by the security guard. With harness RFID technology added with database system, expected that this research will bear a housing portal prototype and tested with remote control car to represent real car.
Prototype of housing portal security system based on RFID made with 4 RFID readers which is consist two types of readers each 2 RFID ID-12 and 2 RFID SL018, use 2 servo motors to move the portal and also use 2 photodiode sensors to detect the car with light sensors.
Based on testing, this research develop the prototype of housing portal security system based on RFID although unstable, use two kind of RFID reader posit their length ability to detect the tag that are RFID ID-12 and RFID SL018 whre the length detection of RFID ID-12 only ±3 cm and length detection of RFID SL018 about ±1cm from the anntena. Servo works opposite with the pulse that give and the degree that resulted, the photodiode sensor results a good length of detection, and the database system that made have a feature to add, save, change, and delete data that inputed by the user.
x
KATA PENGANTAR
Puji syukur saya haturkan kepada Tuhan Yesus Kristus dan Bunda Maria yang telah melimpahkan berkat-Nya. Sehingga saya dapat menyelesaikan Laporan Tugas Akhir ini.
Pada kesempatan ini saya ingin mengucapkan terima kasih kepada pihak – pihak yang telah membantu saya dalam menyelesaikan skripsi ini, baik dalam hal bimbingan, perhatian, kasih sayang, semangat, kritik, dan saran yang telah diberikan. Ucapan terima kasih ini saya sampaikan antara lain kepada :
1. Bapak Sudi Mungkasi, S.Si., M. Math. Sc., Ph.D., selaku Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
2. Bapak Petrus Setyo Prabowo, S.T., M.T., selaku Ketua Jurusan Teknik Elektro Universitas Sanata Dharma.
3. Bapak Ir. Tjendro, M.Kom, selaku Dosen Pembimbing Akademik Teknik Elektro angkatan 2012 dan Pembimbing Tugas Akhir. Terima kasih untuk semua bimbingan yang telah diberikan dengan kesabaran sehingga saya dapat menyelesaikan Tugas Akhir ini.
4. Mama, Papa, Edgar, terima kasih atas waktu, dukungan, kasih sayang dan semangat yang tiada henti sehingga saya dapat menyelesaikan Tugas Akhir ini.
5. Kak Paulus Alexander Eldwin Pradana (Kak Alex), kakak angkatan tahun 2011 yang telah membantu, mengoreksi program dan juga memberi masukan kepada saya selama mengerjakan Tugas Akhir ini.
6. Bapak Subroto, Bapak Mardi, dan Bapak Suryono laboran-laboran laboratorium Teknik Elektro yang selalu membantu untuk melancarkan saya dan teman-teman 2012 dalam pengerjaan Tugas Akhir.
7. Teman-teman penghuni ruang TA dan Teknik Elektro angkatan 2012 yang selalu mendukung, mendengarkan curahan hati, menemani, menghibur, dan membantu saya dalam mengerjakan Tugas Akhir.
8. Teman-teman ex-kepanitiaan (Tia, Cik Novi, Ocka, Happy, Mbah, Vian, Yosua,
xii
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
HALAMAN PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR TABEL ... xiii
DAFTAR GAMBAR ... xiv
BAB I PENDAHULUAN 1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat Penelitian ... 2
1.3. Batasan Masalah ... 2
1.4. Metode Penelitian ... 3
BAB II LANDASAN TEORI 2.1. RFID (Radio Frequency Identification ... 5
2.1.1. Tag RFID ... 6
2.1.2. Jenis Tag RFID ... 6
2.1.3. Tipe Memori Tag ... 8
2.1.4. Reader RFID ... 9
2.2. RFID ID-20 ... 9
2.3. RFID SL018 ... 10
2.4. MySQL ... 11
2.5. Microsoft Visual Basic 6.0 ... 11
2.6.1. Arsitekstur AVT ATMega32 ... 13
2.6.2. Konfigurasi Pin ATMega32 ... 13
2.6.3. Organisasi Memori ... 14
2.6.3.1. Memori Program ... 14
2.6.3.2. Memori Data ... 15
2.6.4. Timer/Counter ... 15
2.6.4.1. Timer/Counter0 ... 15
2.6.4.2. Mode Operasi ... 16
2.6.5. Komunikasi Serial USART ... 18
2.7. Sensor Photodiode ... 22
2.8. LED Infrared ... 23
2.9. Motor Servo ... 24
BAB III RANCANGAN PENELITIAN 3.1. Model Sistem ... 26
3.2. Spesifikasi Prototype Perangkat Keras ... 27
3.3. Perancangan Perangkat keras ... 28
3.3.1. Perancangan Modul RFID Reader ID-20 dan SL018 ... 29
3.3.2. Motor Servo ... 30
3.3.3. Sensor Photodiode ... 30
3.4. Peracangan Perangkat Lunak ... 31
3.4.1. Perancangan Pengidentifikasian Tag RFID ... 31
3.4.2. Perancangan Database ... 32
3.4.3. Perancangan Mikrokontroler ... 34
3.4.4. Perancangan User Interface Menggunakan Visual Basic 6.0 ... 35
BAB IV HASIL DAN PEMBAHASAN 4.1. Hasil Perancangan dan Sistem Kerja Keseluruhan Sistem ... 38
4.2. Hasil Perancangan Perangkat Keras ... 39
4.2.1. Pengaturan Sudut Motor Servo ... 40
4.2.2. Pengaturan Jarak Kerja Sensor Photodioda ... 42
4.3. Hasil Perancangan Perangkat Lunak ... 44
xiv
4.3.1.1. Pembacaan Tag RFID ... 45
4.3.1.2. Pengendalian Motor Servo ... 48
4.3.1.3. Komunikasi Serial Dua Arah Mikrokontroler dan Komputer ... 49
4.3.1.4. Subrutin Program Utama ... 49
4.3.2. Hasil Perancangan Aplikasi di Komputer ... 51
4.3.2.1. Perancangan Sistem Database ... 51
4.3.2.2. Halaman Login Aplikasi ... 53
4.3.2.3. Halaman Perekaman Aktivitas Keluar dan Masuk Kendaraan ... 55
4.3.2.4. Halaman Pendaftaran ... 57
4.3.2.5. Halaman Yang Menampilkan Data Pemilik, Tamu dan Satpam ... 58
4.3.2.6. Pencetakan Laporan dari Aplikasi ... 62
4.3.2.7. Konektivitas Aplikasi Dengan Database ... 63
BAB V KESIMPULAN DAN SARAN 5.1. Kesimpulan ... 66
5.2. Saran ... 66
Daftar Pustaka ... 67
DAFTAR TABEL
Tabel 2.1. Karakteristik RFID ID-20 ... 10
Tabel 2.2. Penentuan Ukuran Karakter ... 21
Tabel 3.1. Perhitungan Nilai OCR ... 30
Tabel 4.1. Perhitungan Error Lebar Pulsa Motor Servo Standar ... 40
Tabel 4.2. Hasil Pengujian Motor Servo Dengan Pulsa ... 41
Tabel 4.3. Hasil Pengujian Sensor Photodioda 1 ... 43
Tabel 4.4. Tabel Hasil Pengujian Sensor Photodioda 2 ... 43
xvi
DAFTAR GAMBAR
Gambar 2.1. Komponen sistem RFID ... 5
Gambar 2.2. Tag RFID ... 6
Gambar 2.3. Komponen Tag Pasif ... 7
Gambar 2.4. Komponen Tag Semi Pasif ... 8
Gambar 2.5. Komponen Tag Aktif ... 8
Gambar 2.6. RFID ID-20 ... 10
Gambar 2.7. RFID SL018 ... 10
Gambar 2.8 Konfigurasi Pin Mikrokontroler ATMega32 ... 13
Gambar 2.9. Peta Memori Flash Mikrokontroler ATMega32 ... 15
Gambar 2.10. Peta Memori Data Mikrokontroler ATMega32 ... 15
Gambar 2.11. Mode Phase Correct PWM ... 17
Gambar 2.12. Mode Fast PWM ... 17
Gambar 2.13. Register UDR ... 18
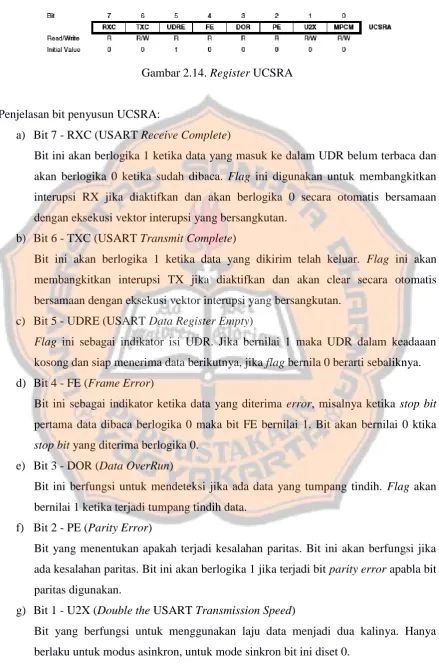
Gambar 2.14. Register UCSRA ... 19
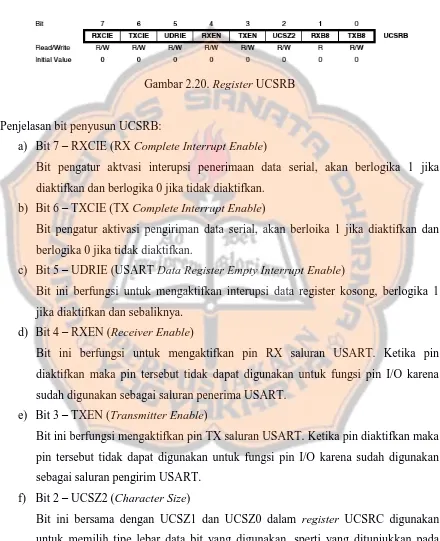
Gambar 2.20. Register UCSRB ... 20
Gambar 2.21. Register UCSRC ... 21
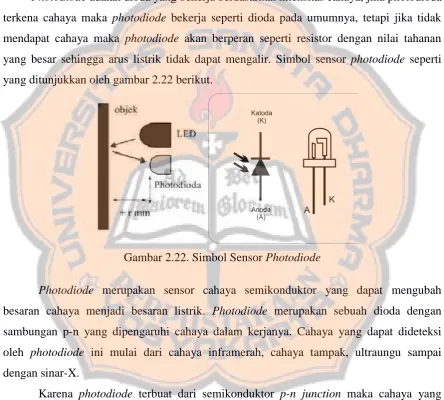
Gambar 2.22. Simbol Sensor Photodiode ... 22
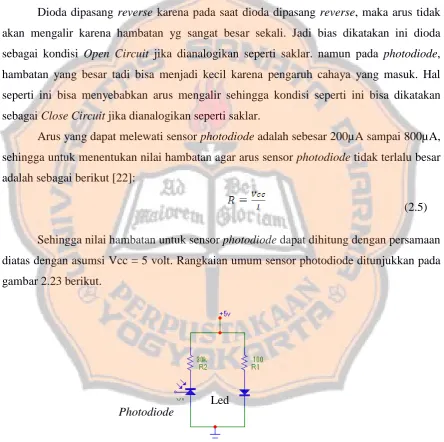
Gambar 2.23. Rangkaian Sensor Photodiode ... 23
Gambar 2.24. Bentuk Fisik Motor Servo ... 24
Gambar 3.1. Diagram Blok Perancangan Sistem Keamanan Portal Perumahan ... 26
Gambar 3.2. Dimensi Prototype Mobil ... 27
Gambar 3.3. Perancangan Portal Tampak Atas ... 27
Gambar 3.4. Perancangan Portal Tampak Depan ... 28
Gambar 3.5. Rangkaian Lengkap Sistem Keamanan Portal Perumahan ... 28
Gambar 3.6. Diagram Rangkaian Modul RFID Reader ... 29
Gambar 3.7. Perancangan 4 buah RFID reader dengan mikrokontroler ... 29
Gambar 3.8. Lebar Pulsa Motor Servo ... 30
Gambar 3.9. Rangakaian Sensor Photodiode ... 31
Gambar 3.10. Perancangan Perangkat Lunak Identifikasi RFID ... 32
Gambar 3.11. Perancangan Perangkat Lunak DatabaseI ... 34
Gambar 3.13. Halaman Login Untuk Mengakses Halaman Aktivitas ... 36
Gambar 3.14. Tampilan Halaman Aktivitas ... 36
Gambar 3.15. Diagram Alir Halaman Login ... 36
Gambar 3.16. Perancangan Perangkat Lunak Visual Basic 6.0 ... 37
Gambar 3.17. Halaman Pendaftaran Tamu Komplek Perumahan... 37
Gambar 4.1. Prototype Pos Satpam ... 38
Gambar 4.2. Prototype Kotak Palang/Portal ... 38
Gambar 4.3. Mobil Mendekati RFID Reader ... 39
Gambar 4.4. Tag RFID Terdeteksi ... 39
Gambar 4.5. Portal Terbuka Sesaat Tag RFID Terdeteksi ... 39
Gambar 4.6. Sudut 20° ... 40
Gambar 4.7. Sudut 40° ... 40
Gambar 4.8. Sudut 60° ... 40
Gambar 4.9. Grafik Linearitas Sudut Terhadap Pulsa ... 41
Gambar 4.10. Rangkaian Sensor Photodioda ... 42
Gambar 4.11. Pengujian Sensor ... 42
Gambar 4.12. Kondisi Awal Sensor ... 42
Gambar 4.13. Kondisi Sensor Saat Diberi Penghalang ... 44
Gambar 4.14. Listing Program Pembacaan Tag untuk RFID Reader ID-12 ... 45
Gambar 4.15. Hasil Pembacaan Tag untuk RFID Reader ID-12 ... 46
Gambar 4.16. Listing Program Pembacaan Tag Untuk RFID Reader SL018 ... 47
Gambar 4.17. Hasil Pembacaan Tag Untuk RFID Reader SL018 ... 47
Gambar 4.18. Listing Program Pengendali Motor Servo ... 48
Gambar 4.19. Listing Program Komunikasi Serial Komputer-Mikro ... 49
Gambar 4.20. Listing Program Utama ... 50
Gambar 4.21. Listing Program Membuat Suatu Database ... 52
Gambar 4.22. Query Untuk Membuat Sebuah Tabel ... 52
Gambar 4.23. Hasil Perancangan Tabel Dalam Database ... 52
Gambar 4.24. ER-Diagram Perancangan Database ... 53
Gambar 4.25. Listing Program Halaman Login ... 54
Gambar 4.26. Hasil Pengujian Halaman Login ... 54
xviii
Gambar 4.29. Hasil Tampilan Halaman Aktivitas Keluar Dan Masuk Kendaraan ... 56
Gambar 4.30. Listing Program Penyimpanan Data Tamu Ke Tabel Tamu ... 57
Gambar 4.31. Halaman Pendaftaran Tamu ... 58
Gambar 4.32. Hasil Pengamatan Halaman Pendaftaran Tamu ... 58
Gambar 4.33. Listing Program Menampilkan Untuk Data Pemilik Atau Satpam ... 59
Gambar 4.34. Hasil Pengamatan Halaman Tampilan Data Satpam ... 59
Gambar 4.35. Query Menambahkan Data Pemilik Atau Satpam Ke Dalam Database ... 60
Gambar 4.36. Menambahkan Data Pemilik Atau Satpam Ke Dalam Database ... 60
Gambar 4.37. Hasil Penambahan Data Pemilik Atau Satpam Ke Dalam Sistem Database60 Gambar 4.38. Query Untuk Mengubah Data Pemilik Atau Satpam Di Dalam Database . 61 Gambar 4.39. Data Satpam Dari Database Yang Akan Di Ubah Dan Diperbaharui ... 61
Gambar 4.40. Query Untuk Menghapus Data Dari Tabel Pemilik Atau Tabel Satpam ... 62
Gambar 4.41. Hasil Penghapusan Data Dari Tabel Pemilik Atau Tabel Satpam ... 62
Gambar 4.42. Percobaan Akses Menggunakan Data Tag RFID Yang Tidak Tersimpan ... 62
Gambar 4.43. Pembuatan Layout Laporan ... 63
Gambar 4.44. Query Untuk Memanggil Tabel Aktivitas Dan Pemilik ... 63
Gambar 4.45. Listing Program Laporan Halaman Aktivitas ... 63
Gambar 4.46. Hasil Laporan Halaman Aktivitas ... 64
Gambar 4.47. Listing Program Koneksi Database Dan Aplikasi ... 64
BAB I
PENDAHULUAN
1.1.
LATAR BELAKANG
Pada zaman modern ini, peningkatan kegiatan ekonomi-sosial terjadi sangat signifikan [1]. Hal ini dipicu karena berkembangnya aktivitas di pasar modal dunia, sehingga berdampak pada meningkatnya kegiatan ekonomi-sosial di dunia termasuk di Indonesia. Sejalan dengan peningkatan ekonomi-sosial, teknologi juga terus berkembang mengimbangi kebutuhan pasar yang semakin meningkat dan beragam. Teknologi yang ada saat ini tidak lagi terbatas tetapi sudah mencakup hampir seluruh aspek kehidupan [2]. Dengan peningkatan ini juga berdampak pada peningkatan taraf hidup masyarakat dan salah satunya berdampak pada kebutuhan akan rumah tinggal yang aman, nyaman, bersih. Teknologi menjadi salah satu komponen penting dalam sebuah kompleks perumahan dimana sistem keamanan dengan bantuan teknologi jauh lebih efektif dan efisien dibanding dengan cara pengamanan tradisional dengan ronda keliling, meskipun kenyataannya beberapa kompleks perumahan yang menerapkan dua metode pengamanan ini baik secara tradisional ataupun modern yang berbasis teknologi. Melihat hal itu banyak developer property berlomba-lomba membangun kompleks perumahan dengan mengunggulkan
sistem keamanannya dan sesuai dengan target pasarnya.
Berdasarkan permasalahan tersebut, penulis berusaha mengembangkan penelitian mengenai sistem keamanan dengan teknologi sebagai tonggak utamanya. Banyak penelitian yang telah menggunakan teknologi RFID (Radio Frequency Indentification) dalam sistem pengamanan seperti sistem pengamanan parkir di gedung-gedung perkantoran maupun di pusat perbelanjaan sebagai kriteria utamanya. Teknologi RFID sendiri merupakan pengembangan dari tekonologi nirkabel yang lebih praktis ketimbang dengan teknologi sebelumnya seperti tag card ataupun barcode yang membutuhkan waktu serta tag reader yang sesuai agar dapat mengenali sebuah obyek, yang kadang tidak terbaca dengan baik apabila tidak pas peletakkannya dan juga memakan waktu yang sedikit lebih lama.
perumahan yang akan dibuat. Hal ini akan menciptakan sistem keamanan dengan tingkat secure lebih tinggi dibandingkan dengan sistem keamanan berbasis RFID lainnya, karena
memungkinkan adanya perekaman data pengakses dan juga aktivitas keluar masuk kendaraan dalam kompleks perumahan untuk meminimalisir hal-hal yang tidak diinginkan terjadi.
Pada penelitian ini, teknologi RFID digunakan sebagai sistem keamanan portal kompleks perumahan di mana setiap tag RFID yang telah didata, diletakkan di bagian dalam mobil warga yang tinggal di kompleks perumahan tersebut. Tag RFID yang digunakan dapat dibaca dengan segala kondisi dan jarak tertentu untuk alasan keamanan, tidak tergantung oleh toleransi horisontal maupun vertikal seperti yang terdapat pada teknologi barcode. Selain itu, juga pembandingan data yang diterima dengan data yang ada di database lebih akurat.
1.2.
TUJUAN DAN MANFAAT
Tujuan dari penelitian ini adalah menciptakan suatu prototype alat sistem keamanan kompleks perumahan dengan menggunakan RFID (Radio Frequency Identification).
Manfaat penelitian ini adalah dapat memberi pengetahuan baru dari perkembangan teknologi pada sistem keamanan pada masyarakat dan juga memberikan solusi teknologi terbarukan pada sistem keamanan terutama sistem keamanan kompleks perumahan bagi para developer property.
1.3.
BATASAN MASALAH
Untuk menghindari terlalu kompleksnya masalah yang muncul, oleh karena itu dibuat batasan-batasan masalah untuk membatasi topik tugas akhir ini, yaitu:
1. Menggunakan Tag RFID yang bersifat read/write.
2. Modul RFID Reader ID-20 dan RFID SL018 digunakan untuk membaca tag RFID. 3. Mikrokontroler 8 bit sebagai kontrol.
4. Sensor photodiode digunakan untuk mendeteksi apakah mobil telah melewati portal atau belum.
5. Motor servo digunakan untuk menggerakkan palang portal, yaitu membuka dan menutup.
6. Menggunakan 2 buah Tag RFID yang mewakili data pemilik rumah dan tamu.
kompleks perumahan.
1.4.
METODOLOGI PENELITIAN
Agar dapat mencapai tujuan yang diinginkan metode-metode yang digunakan dalam penyusunan tugas akhir ini adalah:
1. Studi Literatur
Membaca buku, makalah, artikel, serta jurnal-jurnal untuk memperoleh pengertian, tinjauan pustaka, referensi dan dasar-dasar teori yang berkaitan dengan permasalahan yang akan dibahas pada penelitian ini.
2. Pengamatan.
Mencari data tambahan serta melihat secara langsung pengaplikasian topik yang dibahas agar dapat membuat sebuah perbandingan dan menerapkan beberapa prinsip kerja yang hampir sama, serta mencari referensi dari video.
3. Perancangan Perangkat Keras dan Perangkat Lunak
Merancang gambaran umum mengenai perangkat keras dan perangkat lunak prototype alat yang akan dibuat dengan mempertimbangkan faktor-faktor permasalahan dan kebutuhan yang telah ditentukan, juga untuk mencari spesifikasi terbaik dari perangkat keras prototype alat yang akan dibuat.
4. Pengujian Sistem Gabungan
Melakukan pengujian sistem secara keseluruhan baik perangkat keras maupun perangkat lunaknya sebagai satu prototype alat sistem kemanan kompleks perumahan. Menjalankan aplikasi perangkat lunak masing-masing bagian dan komunikasi antar bagian, kemudian menjalankan sistem perangkat keras dengan perintah dari perangkat lunak dan sensor. Menguji setiap sub-sistem yang ada dalam model perencanaan sistem keamanan portal perumahan berbasis RFID.
5. Proses Pengambilan Data.
Pengambilan data dilakukan setelah semua bagian dalam prototype alat bekerja sesuai dengan tujuan penelitian yang dimaksud. Data diambil dari tegangan masukan dan keluaran serta pengondisian sinyal data yang diperoleh dari komunikasi dua arah pada mikrokontroler yang ada dalam setiap sub-sistem. Mengambil data berupa jarak pembacaan tag RFID sebagai data yang mewakili pengujian seluruh sistem.
6. Analisis dan Kesimpulan.
BAB II
LANDASAN TEORI
2.1. RFID (Radio Frequency Identificaton)
RFID adalah kepanjangan dari radio frequency identification, yang merupakan pengembangan teknologi komunikasi wireless yang digunakan secara unik mengidentifikasi benda atau orang yang di tag [3]. RFID menggunakan teknologi yang memanfaatkan frekuensi radio untuk identifikasi otomatis terhadap suatu obyek [4]. RFID digunakan untuk mempermudah pekerjaan manusia yang awalnya harus mengidentifikasi obyek satu per satu secara manual menjadi otomatis dan terprogram. Hal ini juga dapat mengurangi human error akibat pencatatan identitas obyek secara manual [5].
Dengan teknologi RFID ini, identitas obyek akan dicatat dengan mudah dan cepat. Terdapat tiga komponen utama pada sistem RFID (gambar 2.1), yaitu:
a. Tag (Transponder), yang terdiri dari chip semikonduktor, sebuah antena, dan untuk
beberapa jenis memiliki baterai.
b. Reader (Interogator), yang terdiri dari antena, modul elektronik RF, dan modul
kontrol elektronik.
c. Controller, yang biasanya diambil dari PC atau workstation running database dan
sofware kontrol.
Gambar 2.1. Komponen sistem RFID [3]
Secara ringkas, mekanisme kerja yang terjadi dalam sebuah sistem RFID adalah bahwa sebuah reader frekuensi radio melakukan scanning terhadap data yang tersimpan dalam tag, kemudian mengirimkan informasi tersebut ke sebuah controller.
Tag dan reader mengkomunikasikan informasi satu dengan yang lainnya melalui
reader mendapatkan informasi data dari tag, maka informasi tersebut akan di lanjutkan ke
kontroler dengan jaringan interface standar seperti ethernet, LAN, dan atau internet. Kontroler akan menggunakan informasi data yang diterima untuk berbagai macam tujuan.
2.1.1. Tag RFID
Fungsi utama tag RFID adalah untuk menyimpan data dan juga untuk mentransmittkan ke reader (interogator). Secara umum, chip elektronik memuat memori untuk menyimpan banyak data yang akan dibaca dan kadang untuk menulis data, dalam penambahan sirkuit yang penting. Sebuah tag terdiri atas chip (microchip) dan sebuah antena (Gambar 2.2). Chip tersebut menyimpan nomor seri yang unik atau informasi lainnya.
Antena yang terpasang pada chip mengirimkan informasi dari chip ke reader. Biasanya rentang pembacaan diindikasikan dengan besarnya antena. Antena yang lebih besar mengindikasikan rentang pembacaan yang lebih jauh. Tag tersebut terpasang atau tertanam dalam obyek yang akan diidentifikasi. Tag dapat dibaca dengan reader bergerak maupun stasioner menggunakan gelombang radio [4].
Tag RFID sangat bervariasi dalam hal bentuk dan ukuran. Sebagian tag mudah
ditandai, misalnya tag anti pencurian yang terbuat dari plastik keras yang dipasang pada barang-barang di toko. Tag untuk tracking hewan yang ditanam di bawah kulit berukuran tidak lebih besar dari bagian lancip dari ujung pensil. Bahkan ada tag yang lebih kecil lagi yang telah dikembangkan untuk ditanam di dalam serat kertas uang.
Gambar 2.2. Tag RFID
2.1.2. Jenis Tag RFID
Tag dapat diklasifikasikan menjadi 3 jenis, yaitu tag pasif, tag aktif, dan tag semi
1. Tag Pasif
Tag versi paling sederhana adalah tag pasif, yaitu tag yang tidak memiliki catu
daya sendiri serta tidak dapat menginisiasi komunikasi dengan reader. Sebagai gantinya, tag merespon emisi frekuensi radio dan menurunkan dayanya dari gelombang energi yang dipancarkan oleh reader. Sebuah tag pasif minimal mengandung sebuah indentifier unik dari sebuah item yang dipasangi tag tersebut. Data tambahan dimungkinkan untuk ditambahkan pada tag, tergantung kepada kapasitas penyimpanannya. Contoh aplikasi tag pasif adalah pada pass transit, pass masuk gedung, dan barang-barang konsumsi [8]. Komponen tag pasif ditunjukkan pada Gambar 2.3.
Gambar 2.3. Komponen Tag Pasif [6] 2. Tag Semi Pasif
Tag semi pasif adalah versi tag yang memiliki catu daya sendiri (baterai) tetapi
Gambar 2.4. Komponen Tag Semi Pasif [9] 3. Tag Aktif
Tag aktif adalah tag yang selain memiliki antena dan chip, juga memiliki catu daya
dan pemancar serta mengirimkan sinyal kontinyu [8]. Tag versi ini biasanya memiliki kemampuan baca tulis, dalam hal ini data tag dapat ditulis ulang dan dimodifikasi. Tag aktif dapat menginisiasi komunikasi dan dapat berkomunikasi pada jarak yang lebih jauh, tergantung pada daya baterainya. Pada komunikasi antara tag dan reader dengan tag ini, tag selalu memulai terlebih dahulu, baru kemudian diikuti oleh reader. Gambar 2.5. menunjukkan komponen tag aktif.
Gambar 2.5. Komponen Tag Aktif [6]
2.1.3. Tipe Memori Tag
Seperti yang telah disebutkan di atas, sebuah chip pada sebuah tag berfungsi untuk menyimpan nomor seri yang unik atau informasi lainnya. Ketentuan penyimpanan dan pengisiannya tergantung pada tipe memorinya. Klasifikasi tipe memori tag adalah Read-Only (RO), Write Once-Read Many (WORM), dan Read-Write (RW).
1. Read Only (RO)
Data diisikan oleh pabrikan pada saat proses produksi. Setelah itu, data sama sekali tidak dapat dituliskan kembali pada tag. Tag tipe ini memiliki kapasitas memori minimum (biasanya kurang dari 64 bit) dan mengandung data yang terprogram permanen sehingga tidak dapat diubah [10].
2. Write Once, Read Many (WORM)
Sebuah tag dengan tipe memori WORM dapat diprogram atau satu sekali. Berbeda dengan tipe RO, pengisian tidak dilakukan oleh pabrikan tetapi dilakukan sendiri oleh pengguna [9].
3. Read Write (RW)
Pada tag dengan tipe memori RW, data dapat dimutakhirkan jika diperlukan [10]. Sebagai konsekuensinya kapasitas memorinya lebih besar dan harganya lebih mahal dibandingkan tag RO. Tag dengan tipe memori RW menawarkan keuntungan yang luar biasa karena data yang telah terisi dapat ditulis ulang dan diubah oleh pengguna [9].
2.1.4. Reader RFID
Untuk berfungsinya sistem RFID, diperlukan sebuah reader atau alat scanning yang dapat membaca tag dengan benar dan mengkomunikasikan hasilnya ke suatu controller[10]. Reader disebut juga interogator, yaitu perangkat yang dapat membaca data
pada tag dan mengisi data pada tag. Jadi reader juga berfungsi sebagai writer [9].
Dalam kasus tag pasif, reader berfungsi juga sebagai catu daya untuk mengaktifkan tag. Reader merupakan jembatan antara tag dengan controller [11]. Reader memiliki
beberapa komponen utama, yaitu transmitter, receiver, microprocessor, memory, input/output channels, communication interface, dan power [7].
2.2. RFID ID-20
Tabel 2.1. Karakteristik RFID ID-20
Parameter RFID ID-20
Baca Sampai ±16 cm
Dimensi 26mm x 25mm x 7mm
Frekuensi 125kHz
Format Kartu GK4001/EM4001 atau yang compatible Encoding Manchaster 64-bit, modulus 64 Jenis Catudaya 5 VDC pada 30mA Arus Output I/O -
Jangkauan Catudaya +4.6V – 5.4V
Gambar 2.6. RFID ID-20
2.3. RFID SL018
Salah satu jenis RFID adalah jenis Mifare. RFID (reader dan tag) ini bekerja pada frekuensi tinggi (high frequency) yakni 13,56 MHz. Gambar 2.7. menunjukkan modul RFID SL018.
Gambar 2.7. RFID SL018
Berdasarkan pada datasheet RFID SL018, RFID ini dapat membaca tag berjenis Mifare 1k, Mifare 4k, Mifare Ultra Light dan NFC NATG203 [5]. Untuk menggunakan
berjarak hingga 60 mm. Dilengkapi pula pin TagSta sebagai indikator ada tidaknya tag disekitarnya.
2.4. MySQL
MySQL (My Structured Query Language) adalah sebuah program pembuat dang pengelola data yang sering disebut dengan DBMS (Database Management System) [5]. MySQL menyediakan fasilitas-fasilitas untuk mengatur dan mengelola database, serta menyediakan bahasa pemrograman SQL (Structured Query Language, biasa dibaca sebagai
“sekuel”) untuk mengolah database client-server. MySQL mulai memperkenalkan penggunaan Stored Procedure dan Trigger, sehingga menjadikan MySQL sebagai penyedia layanan pemrograman client-server secara penuh. Adapun kelebihan-keleihan MySQL adalah sebagai berikut [13]:
a. MySQL sebagai Database Management System (DBMS).
b. MySQL sebagai Relational Database Management System (RDBMS). c. MySQL bersifat open source atau gratis.
d. MySQL merupakan database server dan merupakan database client. Mampu menyimpan data berkapasitas sangat besar.
e. MySQL memiliki kecepatan dalam pembuatan tabel maupun peng-upadate-an tabel.
ODBC adalah singkatan dari Open Database Connectivity. ODBC merupakan standar yang dikembangkan Microsoft untuk melakukan koneksi database melalui driver-driver yang independen terhadap suatu produk. Konektor ODBC adalah program dan
driver yang bisa mengalikan suatu program (termasuk program database server, misalnya
MySQL) dengan ODBC [14]. MySQL menyediakan berbagai macam konektor ODBC dalam berbagai platform (sistem operasi) dan versi program.
2.5. Microsoft Visual Basic 6.0
Visual Basic 6.0 merupakan aplikasi pemrograman visual yang dibuat oleh Microsoft. Visual Basic 6.0 berjalan dalam sistem operasi Windows dan tergabung dalam suite aplikasi Microsoft Visual Studio 6.0. Visual Basic 6.0 (atau yang disingkat dengan VB 6.0) adalah perangkat unak untuk menyusun program aplikasi yang bekerja dalam sistem operasi Windows [15].
proses penggunaannya, sehingga proses pembuatan program menjadi lebih mudah dan nyaman. Visual Basic 6.0 menggunakan bahasa pemrograman even drive, program yang menunggu sampai adanya respon dari pemakai yang berupa kejadian tertentu. Dengan kecanggihan yang ditawarkan Visual Basic 6.0 user dimanjakan dengan mudahnya menyusun program dengan tampilan grafis yang menawan [16].
Dalam pembuatan program Visual Basic 6.0 digunakan dua tipe kode, yaitu form untuk meletakkan control, fungsi dan variabel. Selain itu ada juga module untuk meletakkan prosedur/fungsi dan variabel [17]. Kode merupakan milik dari obyek yang disisipkan kode. Obyek atau control lainnya tidak dapat menggunakan kode yang bukan menjadi miliknya. Jika sebuah blok kode akan digunakan bersama, maka kode tersebut diletakkan di luar control. Blok kode disebut dengan prosedur atau fungsi. Prosedur atau fungsi diletakkan pada suatu obyek lain yang disebut dengan modul, dan pada form. Prosedur/fungsi diletakkan pada modul dapat digunakan oleh seluruh program, sedangkan prosedur/fungsi yang diletakkan pada form hanya dapat digunakan oleh form yang mengandung prosedur/fungsi tersebut.
Terdapat tiga edisi Visual Basic 6.0 yang dikeluarkan oleh Microsoft yakni Standard Edition, Professional Edition, dan Enterprise Edition. Pada penelitian ini digunakan Visual
Basic 6.0 Enterprise Edition untuk membuat aplikasi yang bersifat server based. Program - program aplikasi standar dapat berjalan dengan baik jika menggunakan versi ini. Ada beberapa fasilitas tambahannya yaitu:
a. Aplikasi Performance Explorer.
b. Pendukung Microsoft Transaction Server 2.0. c. Visual Component Manager.
d. SQL (Structured Query Language) Debugging. e. Visual Database Tool.
2.6. Mikrokontroler AVR ATMega32
ATMEGA32 termasuk dalam mikrokontroler unit (MCU) 8 – bit keluarga AVR (Alf
and Vegard’s Risc Processor) ATMega yang memiliki daya guna tinggi dan penggunaan
daya yang rendah [18]. ATMega32 dirancang berdasarkan arsitektur RISC (Reduced Instruction Set Computing), dimana semua instruksi dikemas dalam kode 16 – bit (16 – bits word) dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus. Hampir semua
timer/counter fleksibel dengan mode compare, interupsi internal dan eksternal, serial
UART, programmable Watchdog Timer, dan power saving mode. AVR juga mempunyai ADC, PWM internal dan In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang [18].
2.6.1. Arsitektur AVR ATMega32
Mikrokontroler AVR ATMega32 memiliki arsitektur sebagai berikut: a. Saluran IO sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D. b. ADC 10 bit sebanyak 8 channel.
c. Tiga buah timer/counter yaitu Timer 0, Timer 1, dan Timer 2 d. Watchdog Timer dengan osilator internal.
e. SRAM sebanyak 512 byte. f. Memori Flash sebesar 32 kb.
g. Sumber Interupsi internal dan eksternal. h. Port SPI (Serial Pheriperal Interface). i. EEPROM on board sebanyak 512 byte. j. Komparator analog.
k. Port USART (Universal Shynchronous Ashynchronous Receiver Transmitter).
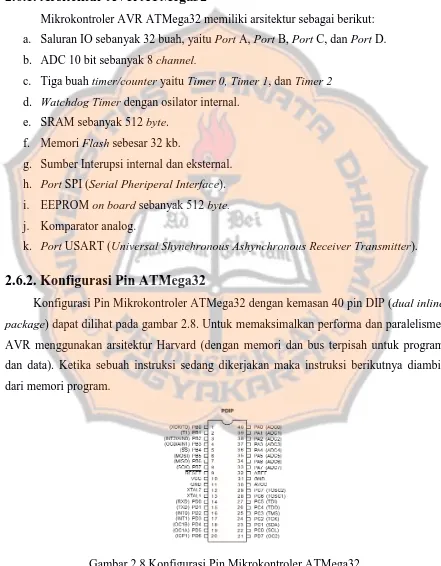
2.6.2. Konfigurasi Pin ATMega32
Konfigurasi Pin Mikrokontroler ATMega32 dengan kemasan 40 pin DIP (dual inline package) dapat dilihat pada gambar 2.8. Untuk memaksimalkan performa dan paralelisme,
[image:33.595.80.521.192.758.2]AVR menggunakan arsitektur Harvard (dengan memori dan bus terpisah untuk program dan data). Ketika sebuah instruksi sedang dikerjakan maka instruksi berikutnya diambil dari memori program.
Mikrokontroler ATMega32 memiliki konfigurasi pin sebagai berikut: a. VCC (power supply).
b. GND (ground).
c. Port A (PA7..PA0) Port A berfungsi sebagai input analog pada ADC (Analog Digital Converter). Port A juga berfungsi sebagai suatu Port I/O 8-bit dua arah.
d. Port B (PB7..PB0) Port B adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
e. Port C (PC7..PC0) Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
f. Port D (PD7..PD0) Port D adalah suatu Port I/O 8-bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
g. RESET (Reset input). h. XTAL1 (Input Oscillator). i. XTAL2 (Output Oscillator).
j. AVCC adalah pin penyedia tegangan untuk Port A dan ADC. k. AREF adalah pin referensi analog untuk ADC,
Port A berfungsi sebagai input analog pada A/D converter (ADC) dan port I/O 8-bit dua arah. Port B, Port C, dan Port D adalah suatu port I/O 8-bit dua arah dengan resistor pull-up (yang dipilih untuk beberapa bit). Pada rangkaian reset, waktu pengosogan
kapasitor dapat dihitng dengan persamaan 2.1 [19].
T = R x C (2.1)
2.6.3. Organisasi Memori
Arsitektur AVR memiliki dua ruang memori utama, yaitu ruang memori program dan ruang memori data. ATMega32 juga memiliki fitur EEPROM memori untuk penyimpanan data [18].
2.6.3.1. Memori Program
[image:34.595.86.531.87.619.2]Gambar 2.9. Peta Memori Flash Mikrokontroler ATMega32
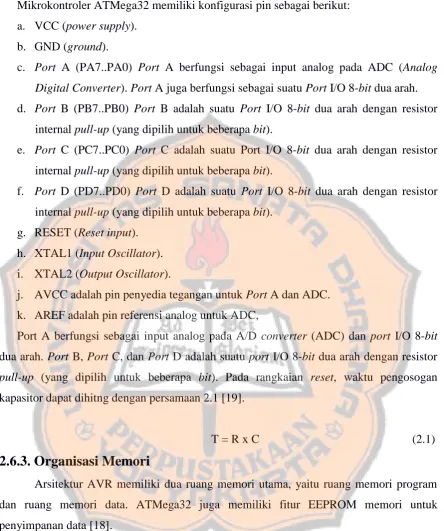
2.6.3.2. Memori Data
Mikrokontroler ATMega32 memiliki SRAM internal sebesar 2Kbytes. Organisasi memori data SRAM pada mikrokontroler ATMega32 dapat dilihat pada peta memori data seperti yang ditunjukkan oleh gambar 2.10 di bawah ini.
Gambar 2.10. Peta Memori Data Mikrokontroler ATMega32
2.6.4. Timer/Counter
ATMega32 memiliki tiga modul timer yang terdiri dari dua buah timer/counter 8 bit dan satu buah timer/counter 16 bit. Ketiga modul ini dapat diatur dalam mode yang
berbeda-beda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu semua timer/counter juga dapat difungsikan sebagai pencacahan waktu seperti pada jam digital maupun untuk menghasilkan sinyal PWM (Pulse Width Modulation) yakni sinyal kotak dengan frekuensi dan duty cycle yang nilainya bisa diatur [19].
2.6.4.1. Timer/Counter0
PWM untuk menggerakkan motor servo. Timer/counter0 merupakan timer/counter 8 bit dengan fitur sebagai berikut:
a. Timer/counter 1 kanal.
b. Auto reloads yaitu timer akan dinolkan kembali saat match compare.
c. Dapat menghasilkan pulsa PWM (Pulse Width Modulation) dengan glitch free. d. Frequency generator.
e. External Event Counter.
f. Prescalar 10 bit untuk timer.
g. Membangkitkan interupsi saat timer overflow dan atau match compare.
Perhitungan overflow interrupt sebagai pembangkit PWM ditunjukkan pada persamaan 2.2, 2.3, dan 2.4 berikut ini [19].
(2.2)
(2.3)
(2.4)
Keterangan:
f = frekuensi yang digunakan untuk eksekusi program T = periode
N = prescaller yang digunakan OCR = nilai cacahan pulsa
Pulse = lebar pulsa
2.6.4.2. Mode Operasi
Berikut adalah mode operasi
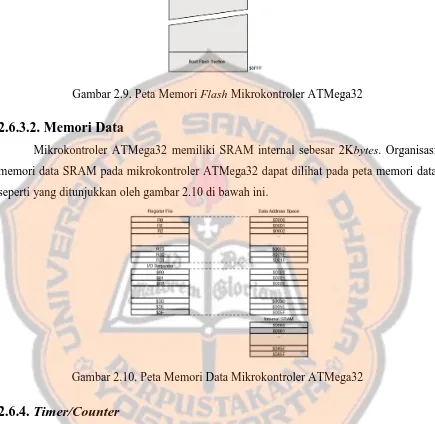
2. Mode phase correct PWM (PCP), digunakan untuk menghasilkan sinyal PWM dimana nilai register counter (TCNT0) yang mencacah naik dan turun secara terus-menerus akan selalu dibandingkan dengan register pembanding OCR0 [21]. Hasil pembandingan register TCNT0 dan OCR0 digunakan untuk membangkitkan sinyal PWM yang dikeluarkan pada OCR0 seperti ditunjukkan pada gambar 2.11.
Gambar 2.11. Mode Phase Correct PWM [23]
3. CTC (Clear timer on compare match), register counter (TCNT0) akan mencacah naik kemudian di-reset atau kembali menjadi 0x00 pada saat nilai TCNT0 sama dengan OCR0. Sebelumnya OCR diset dulu, karena timer 0 dan 2 maksimumnya 255, maka range OCR 0-255 [19].
4. Fast PWM, mode ini hamper sama dengan mode phase correct PWM, hanya perbedaanya adalah register counter TCNT0 mencacah naik saja dan tidak pernah mencacah turun seperti gambar 2.12 berikut ini [19].
2.6.5. Komunikasi Serial USART
Komunikasi data adalah perpindahan data antara satu atau lebih piranti, perpindahan tersebut dapat dilaksanakan secara parallel atau seri. Komunikasi seri dapat dibedakan menjadi dua macam yaitu, komunikasi data seri sinkron dan asinkron. Suatu komunikasi dapat dikatakan sinkron jika sisi pengirim dan penerima dipicu (clocked) oleh pemicu (clock) yang sama, satu sumber pemicu, data dikirim beserta pemicu. Sedangkan suatu komunikasi dikatakan asinkron jika sisi pengirim dan penerima dipicu oleh pemicu yang terpisah dengan frekuensi yang hampir sama, data dikirim disertai informasi sinkronisasi.
Pada proses inisialisasi ini setiap perangkat yang terhubung harus memiliki baudrate yang sama. Beberapa fasilitas yang disediakan USART AVR adalah sebagai
berikut:
a) Operasi full duplex (mempunyai register receive dan transmit yang terpisah) b) Mendukung kecepatan multiprosesor
c) Mode kecepatan berorde Mbps d) Operasi asinkron atau sinkron
e) Operasi master atau slave clock sinkron
f) Dapat menghasilkan baud-rate (laju data) dengan resolusi tinggi g) Modus komunikasi kecepatan ganda pada asinkron
Inisialisasi USART
Pada mikrokontroler AVR untuk mengaktifkan dan mengeset komunikasi USART dilakukan dengan cara mengaktifkan register-register yang digunakan untuk komunikasi USART. Register-register yang digunakan untuk komunikasi USART antara lain:
USART I/O Data Register (UDR)
UDR merupakan dua buah register 8 bit dengan alamat yang sama, yang digunakan sebagai tempat untuk menyimpan data yang akan dikirimkan (TXB) atau tempat data diterima (RXB) sebelum data tersebut dibaca, seperti yang terlihat pada gambar 2.13 berikut ini.
USART Control and Status Register A (UCSRA)
Gambar 2.14. Register UCSRA
Penjelasan bit penyusun UCSRA:
a) Bit 7 - RXC (USART Receive Complete)
Bit ini akan berlogika 1 ketika data yang masuk ke dalam UDR belum terbaca dan akan berlogika 0 ketika sudah dibaca. Flag ini digunakan untuk membangkitkan interupsi RX jika diaktifkan dan akan berlogika 0 secara otomatis bersamaan dengan eksekusi vektor interupsi yang bersangkutan.
b) Bit 6 - TXC (USART Transmit Complete)
Bit ini akan berlogika 1 ketika data yang dikirim telah keluar. Flag ini akan membangkitkan interupsi TX jika diaktifkan dan akan clear secara otomatis bersamaan dengan eksekusi vektor interupsi yang bersangkutan.
c) Bit 5 - UDRE (USART Data Register Empty)
Flag ini sebagai indikator isi UDR. Jika bernilai 1 maka UDR dalam keadaaan
kosong dan siap menerima data berikutnya, jika flag bernila 0 berarti sebaliknya. d) Bit 4 - FE (Frame Error)
Bit ini sebagai indikator ketika data yang diterima error, misalnya ketika stop bit pertama data dibaca berlogika 0 maka bit FE bernilai 1. Bit akan bernilai 0 ktika stop bit yang diterima berlogika 0.
e) Bit 3 - DOR (Data OverRun)
Bit ini berfungsi untuk mendeteksi jika ada data yang tumpang tindih. Flag akan bernilai 1 ketika terjadi tumpang tindih data.
f) Bit 2 - PE (Parity Error)
Bit yang menentukan apakah terjadi kesalahan paritas. Bit ini akan berfungsi jika ada kesalahan paritas. Bit ini akan berlogika 1 jika terjadi bit parity error apabla bit paritas digunakan.
g) Bit 1 - U2X (Double the USART Transmission Speed)
h) Bit 0 - MPCM (Multi Processor Communication Mode)
Bit untuk mengaktifkan modus multi prosessor, dimana ketika data yang diterima oleh USART tidak mengandung informasi alamat akan diabaikan.
[image:40.595.85.525.175.716.2]USART Control and Status Register B (UCSRB)
Gambar 2.20. Register UCSRB
Penjelasan bit penyusun UCSRB:
a) Bit 7 – RXCIE (RX Complete Interrupt Enable)
Bit pengatur aktvasi interupsi penerimaan data serial, akan berlogika 1 jika diaktifkan dan berlogika 0 jika tidak diaktifkan.
b) Bit 6 – TXCIE (TX Complete Interrupt Enable)
Bit pengatur aktivasi pengiriman data serial, akan berloika 1 jika diaktifkan dan berlogika 0 jika tidak diaktifkan.
c) Bit 5 – UDRIE (USART Data Register Empty Interrupt Enable)
Bit ini berfungsi untuk mengaktifkan interupsi data register kosong, berlogika 1 jika diaktifkan dan sebaliknya.
d) Bit 4 – RXEN (Receiver Enable)
Bit ini berfungsi untuk mengaktifkan pin RX saluran USART. Ketika pin diaktifkan maka pin tersebut tidak dapat digunakan untuk fungsi pin I/O karena sudah digunakan sebagai saluran penerima USART.
e) Bit 3 – TXEN (Transmitter Enable)
Bit ini berfungsi mengaktifkan pin TX saluran USART. Ketika pin diaktifkan maka pin tersebut tidak dapat digunakan untuk fungsi pin I/O karena sudah digunakan sebagai saluran pengirim USART.
f) Bit 2 – UCSZ2 (Character Size)
Tabel 2.2. Penentuan Ukuran Karakter UCSZ[2..0] Ukuran Karakter dalam bit
0 5
1 6
10 7
11 8
100-110 Tidak dipergunakan
111 9
g) Bit 1 – RXB8 (Receive Data Bit 8)
Bit ini digunakan sebagai bit ke-8 ketika menggunakan format data 9-10 bit, dan bit ini harus dibaca dahulu sebelum membaca UDR.
h) Bit 0 – TXB8 (Transmit Data Bit 8)
Bit ini dipergunakan sebagai bit ke-8 ketika menggunakan format data 9-10 bit, dan bit ini harus ditulis dahulu sebelum membaca UDR.
USART Control and Status Register C (UCSRC)
Gambar 2.21. Register UCSRC
Penjelasan bit penyusun UCSRC: a) Bit 7 - URSEL (Register Select)
Bit ini berfungsi untuk memilih register UCSRC dengan UBBRH, dimana untuk menulis atau membaca register UCSRC maka bit harus berlogika satu.
b) Bit 6 - UMSEL (USART Mode Select)
Bit pemilih mode komunikasi serial antara sinkron dan asinkron. c) Bit 5..4 – UPM[1..0] (Parity Mode)
Bit ini berfungsi untuk memilih mode paritas bit yang akan digunakan. Transmitter USART akan membuat paritas yang akan digunakan secara otomatis.
d) Bit 3 – USBS (Stop Bit Select)
Bit yang berfungsi untuk memilih jumlah stop bit yang akan digunakan. e) Bit 2..1 – UCSZ[1..0] (Character Size)
lebar data yang digunakan dikombinasikan dengan bit UCSZ2 dalam register UCSRB.
f) Bit 0 – UCPOL (Clock Polarity)
Bit yang berguna hanya untuk modus sinkron. Bit ini berhubungan dengan perubahan data keluaran dan sampel masukan, dan clock sinkron (XCK).
2.7. Sensor Photodiode
Photodiode adalah dioda yang bekerja berdasarkan intensitas cahaya, jika photodioda
[image:42.595.82.527.235.635.2]terkena cahaya maka photodiode bekerja seperti dioda pada umumnya, tetapi jika tidak mendapat cahaya maka photodiode akan berperan seperti resistor dengan nilai tahanan yang besar sehingga arus listrik tidak dapat mengalir. Simbol sensor photodiode seperti yang ditunjukkan oleh gambar 2.22 berikut.
Gambar 2.22. Simbol Sensor Photodiode
Photodiode merupakan sensor cahaya semikonduktor yang dapat mengubah
besaran cahaya menjadi besaran listrik. Photodiode merupakan sebuah dioda dengan sambungan p-n yang dipengaruhi cahaya dalam kerjanya. Cahaya yang dapat dideteksi oleh photodiode ini mulai dari cahaya inframerah, cahaya tampak, ultraungu sampai dengan sinar-X.
yang diserap oleh photodiode [22].
Photodiode digunakan sebagai penangkap gelombang cahaya yang dipancarkan
oleh inframerah. Besarnya tegangan atau arus listrik yang dihasilkan oleh photodiode tergantung besar kecilnya radiasi yang dipancarkan oleh inframerah.
Sifat dari Photodiode adalah :
1. Jika terkena cahaya maka resistansinya berkurang 2. Jika tidak terkena cahaya maka resistansinya meningkat
Dioda dipasang reverse karena pada saat dioda dipasang reverse, maka arus tidak akan mengalir karena hambatan yg sangat besar sekali. Jadi bias dikatakan ini dioda sebagai kondisi Open Circuit jika dianalogikan seperti saklar. namun pada photodiode, hambatan yang besar tadi bisa menjadi kecil karena pengaruh cahaya yang masuk. Hal seperti ini bisa menyebabkan arus mengalir sehingga kondisi seperti ini bisa dikatakan sebagai Close Circuit jika dianalogikan seperti saklar.
Arus yang dapat melewati sensor photodiode adalah sebesar 200µA sampai 800µA, sehingga untuk menentukan nilai hambatan agar arus sensor photodiode tidak terlalu besar adalah sebagai berikut [22]:
[image:43.595.83.528.225.667.2](2.5) Sehingga nilai hambatan untuk sensor photodiode dapat dihitung dengan persamaan diatas dengan asumsi Vcc = 5 volt. Rangkaian umum sensor photodiode ditunjukkan pada gambar 2.23 berikut.
Gambar 2.23. Rangkaian Sensor Photodiode
2.8.
LED Infrared
LED Infrared merupakan suatu komponen elektronika yang merupakan sumber Photodiode
cahaya dengan panjang gelombang 750nm – 100nm dan arus maksimal sebesar 100 mA [23]. Aplikasi LED infrared biasa dijumpai pada modul sensor yang behubungan dengan cahaya seperti photodiode dan photo transistor. LED infrared merupakan sumber cahaya yang paling baik untuk sumber cahaya.
Prinsip kerja LED infrared sama dengan LED biasa. Perbedaannya cahaya yang dipancarkn pada LED inrfrared berupa cahaya tak tampak. LED infrared memiliki arus maksimal sebesar 100mA. Kelemahan dari LED infrared adalah daya jelajah yang tidak jauh hanya sekitar 7 – 8 meter dengan sudut radiasi sebesar 45° [24]. Penentuan nilai hambatan untuk LED infrared dengan asumsi Vcc = 5 volt yaitu:
(2.6)
2.9.
Motor Servo
Motor servo merupakan motor DC yang sudah dilengkapi dengan sistem kontrol didalamnya. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Pada aplikasinya, motor servo digunakan sebagai control loop tertutup, sehingga dapat menangani perubahan posisi secara tepat dan akurat [25]. Motor servo banyak digunakan sebagai aktuator pada mobile robot atau lengan robot. Bentuk fisik motor servo dapat dilihat pada gambar 2.24.
Gambar 2.24. Bentuk Fisik Motor Servo
Motor servo umunya terdiri dari servo continuous dan servo standard. Motor servo continuous dapat berputar sebesar 360 derajat. Sedangkan motor servo tipe standard hanya
sama dengan 2 ms dan pulsa lebih besar dari atau sama dengan 1 ms untuk berputar 90° ke kiri.
26
BAB III
RANCANGAN PENELITIAN
3.1. Model Sistem
Secara umum perancangan sistem keamanan portal menggunakan beberapa perangkat keras seperti tag RFID, RFID reader, sensor photodiode, mikrokontroler, motor servo, dan unit PC server. Prinsip kerja dari sistem keamanan portal ini adalah tag RFID yang berjenis mifare card dibaca oleh RFID reader, data diterima oleh mikronkontroler kemudian dikirim ke PC server untuk dicocokkan dengan database di PC server, jika data yang diperoleh sesuai maka PC server akan mengirim perintah ke mikrokontroler untuk menggerakkan motor membuka portal dan kemudian mikro menunggu sinyal dari sensor photodiode apakah mobil sudah melewati portal atau belum, jika mobil sudah melewati
portal maka secara otomatis mikro akan meenggerakkan motor menutup portal. Gambar 3.1 menunjukkan diagram blok perancangan sistem keamanan portal perumahan.
Gambar 3.1. Diagram Blok Perancangan Sistem Keamanan Portal Perumahan
Pada penelitian ini kartu yang digunakan berjumlah 2 buah, yang masing - masing untuk pemilik rumah dan tamu. Prinsip kerja kedua kartu terhadap sistem keamanan portal sama yang membedakan hanya kartu untuk pemilik rumah sebelumnya telah memiliki nomor akses kartu, diletakkan di bagian kaca mobil, dan dengan kartu yang sama dapat mengakses portal berulang-ulang. Sedangkan kartu yang diperuntukkan untuk tamu perumahan sebelumnya harus didata terlebih dahulu oleh satpam kemudian mendapatkan nomor akses, dipegang oleh pengguna kartu dan hanya dapat diakses dua kali saja yakni satu kali masuk dan satu kali keluar.
RFID Mifare Card
Sensor Photodiode
Mikrokontroler RFID
Reader
PC Server
3.2. Spesifikasi Prototype Perangkat Keras
Dalam penelitian ini akan digunakan mobil remote kontrol sebagai prototype mobil yang akan digunakan. Dengan dimensi ukuran lebar mobil 19 cm, panjang 39 cm, dan tinggi 13 cm berdasarkan standar ukuran sesungguhnya mobil remote kontrol yang ada di pasaran. Gambar tampak depan dan tampak samping model mobil remote kontrol yang ditunjukkan pada gambar 3.2. berikut ini.
Gambar 3.2. Dimensi Prototype Mobil
Gambar 3.3 dan 3.4 berikut menunjukkan bentuk fisik tampak atas dan depan keseluruhan bidang kerja perancangan sistem keamanan portal dalam penelitian ini.
Gambar 3.3. Perancangan Portal Tampak Atas
19 cm
39 cm
13 cm
25 cm 50 cm
80 cm
70 cm 5 cm
15 cm
20 cm
Masuk
Gambar 3.4. Perancangan Portal Tampak Depan
3.3. Perancangan Perangkat Keras
Secara umum perancangan rangkaian elektronis keseluruhan sistem seperti pada gambar 3.5 berikut ini, yang menunjukkan komunikasi dari RFID reader ke mikrokontroler dan ke komputer.
Gambar 3.5. Rangkaian Lengkap Sistem Keamanan Portal Perumahan
25 cm
10 cm 12 cm
3.3.1. Perancangan Modul RFID Reader ID-20 dan SL018
Perancangan rangkaian elektronis untuk RFID reader modul ID-20 dan SL018 berdasarkan datasheet seperti pada gambar 3.6.
(a) SL018 (b) ID-20
Gambar 3.6. Diagram Rangkaian Modul RFID Reader
Dalam penelitian akan digunakan 2 buah modul RFID reader ID-20 dan 2 buah modul RFID reader SL018 untuk masing-masing portal. Modul ID-20 digunakan untuk pembacaan jarak jauh dan modul SL018 digunakan untuk pembacaan jarak dekat. Komunikasi antar modul RFID reader dengan mikrokontroler menggunakan komunikasi USART. Dengan demikian bentuk perancangan modul RFID reader secara keseluruhan seperti gambar 3.7.
3.3.2. Motor Servo
Dalam perancangan sistem parkir otomatis ini buka tutup pintu gerbang akan menggunakan motor servo. Motor servo yang akan digunakan berjumlah dua buah, satu buah untuk gerbang masuk dan satu buah lagi untuk gerbang keluar. Untuk mengaktifkan motor servo diperlukan pulsa PWM yang diatur dari mikrokontroler sebagai output mikro.
Untuk mendapatkan lebar pulsa PWM yang diinginkan maka perlu menghitung besar nilai OCR, agar sesuai dengan gambar 3.8 berikut ini:
Gambar 3.8. Lebar Pulsa Motor Servo
Berikut tabel 3.1 hasil perhitungan lebar pulsa PWM dengan menggunakan rumus perhitungan pulsa PWM yang ada pada landasan teori:
Tabel 3.1. Perhitungan Nilai OCR
SUDUT LEBAR PULSA NILAI OCR
0o 1 ms 43,20
90o 1,5 ms 64,8
3.3.3. Sensor Photodiode
Gambar 3.9. Rangakaian Sensor Photodiode
Berdasarkan datasheet mengenai sensor photodiode, dengan besar arus 200µA dan besar tegangan reverse 5 volt [27], maka besar nilai hambatan yang dapat diimplementasikan adaah sebagai berikut:
R2 = = 25 kΩ
Sedangkan untuk nilai hambatan utnuk LED infrared berdasarkan pada dataheet bahwa tegangan yang mengalir maksimal sebesar 5 volt, besar arus yang mengalir maksimalnya adalah 100 mA [28] dan arus minimum adalah 20 mA, dan besar tegangan forward sebesar 1,2 volt, maka:
R1 = = 190 Ω
Dalam implementasinya digunakan resistor 220 Ω. Sedangkan untuk hambatan yang digunakan sensor photodiode adalah sebesar 27 kΩ.
3.4. Perancangan Perangkat lunak
Perancangan perangkat lunak dibagi menjadi 3 bagian yaitu perancangan mikrokontroler, user interface dan sistem database dengan menggunakan 3 jenis software program yakni Code Vision AVR untuk pemrograman mikrokontroler, Visual Basic 6.0 untuk pemrograman user interface dan MySQL untuk pemrograman sistem database.
3.4.1. Perancangan Pengidentifikasian Tag RFID
Pada perancangan perangkat lunak proses identifikasi tag RFID dibagi menjadi dua bagian, setiap pintu portal terdiri dari 2 RFID reader, RFID reader yang pertama di peruntukkan bagi “member” atau pemilik rumah yang sudah di data dan disimpan datanya
Photodiode
Led
220 27k
pada database di PC server, tag RFID yang digunakan diletakkan pada mobil pemilik dan sifatnya permanen.
Sedangkan jenis RFID reader yang kedua diperuntukkan bagi tamu perumahan yang diasumsikan tidak terdaftar dalam database di PC server, tag RFID yang digunakan berupa kartu yang sifatnya non-permanen atau kartu yang hanya dapat dipakai sekali waktu (tapping masuk-tapping keluar) dan pada tapping-an berikutnya kartu tidak memiliki data apapun untuk dibaca oleh reader. Perancangan perangkat lunak RFID secara umum ditunjukkan oleh gambar 3.10 berikut.
Gambar 3.10. Perancangan Perangkat Lunak Identifikasi RFID
3.4.2. Perancangan Database
keluar-masuk mobil di kompleks perumahan. Sebagai salah satu persyaratan keamanan yang dapat mengakses sistem ini adalah satpam dan ketua RT kompleks perumahan. Peran mereka adalah sebagai berikut:
a. Satpam
Satpam akan memakai sistem ini untuk menginputkan, menyimpan, meng-update data para tamu. Satpam juga menggunakan sistem ini hanya untuk memantau aktivitas kunjungan dan keluar-masuk kendaraan di kompleks perumahan.
b. Ketua RT
Ketua RT mencari, menambahkan, menghapus, dan mencetak semua data yang berhubungan dengan warganya termasuk intensitas kunjungan tamu per rumah hunian.
Perancangan Database yang di buat pada sistem ini terdiri dari 5 tabel yaitu: a. Tabel Administrator
Tabel ini digunakan untuk menyimpan data login setiap user. b. Tabel Aktivitas
Tabel ini digunakan untuk menyimpan data aktivitas keluar-masuk mobil di kompleks perumahan.
c. Tabel Pemilik Rumah :
Tabel ini digunakan untuk menyimpan data lengkap pemilik rumah hunian di kompleks perumahan.
d. Tabel Anggota Keluarga
Tabel ini digunakan untuk menyimpan data anggota keluarga yang tinggal bersama pemilik rumah.
e. Tabel Tamu
Tabel ini digunakan untuk mnyimpan data tamu yang berkunjung.
Gambar 3.11. Perancangan Perangkat Lunak Database
3.4.3. Perancangan Mikrokontroler
Gambar 3.12. Perancangan Perangkat Lunak Mikrokontroler
3.4.4. Perancangan User Interface Menggunakan Visual Basic 6.0
Gambar 3.13. Halaman Login Untuk Mengakses Halaman Aktivitas
Gambar 3.14. Tampilan Halaman Aktivitas
Gambar 3.15. Diagram Alir Halaman Login
3.16 dan tampilan halaman pendaftaran identitas tamu ditunjukkan pada halaman 3.17.
Gambar 3.16. Perancangan Perangkat Lunak Visual Basic 6.0
38
BAB IV
HASIL DAN PEMBAHASAN
Dalam bab ini akan dibahas hasil pengujian dan pengamatan dari sistem keamanan portal berbasis RFID yang telah dibuat. Pengujian dan pengamatan yang dilakukan berupa pembacaan tag RFID, gerak motor servo, jarak deteksi sensor photodioda, komunikasi serial antara komputer dan mikrokontroler, sistem database, koneksi aplikasi visual basic dengan database, serta hasil pengamatan sistem secara keseluruhan pintu portal masuk dan pintu portal keluar.
4.1. Hasil Perancangan dan Sistem Kerja Keseluruhan Sistem
[image:58.595.88.526.222.599.2]Hasil perancangan prototype pos satpam dapat dilihat pada gambar 4.1, perancangan kotak palang atau portal ditunjukkan oleh gambar 4.2, dan simulasi keluar-masuk kendaraan ditunjukkan secara berurutan pada gambar 4.3, 4.4, dan 4.5.
Gambar 4.1. Prototype Pos Satpam Gambar 4.2. Prototype Kotak Palang/Portal Mekanisme kerja dari prototype adalah mobil berjalan mendekati portal, RFID reader kemudian mendeteksi tag RFID yang tertempel pada mobil (jika diasumsikan kartu
Setelah sensor photodioda mendeteksi mobil yang lewat secara otomatis portal akan menutup setelah mobil lewat. Pembacaan tag RFID menggunakan 2 jenis RFID reader dengan jarak deteksi yang berbeda dimaksudkan untuk membedakan akses tamu
dan pemilik rumah, dimana dalam perancangan ini RFID reader yang digunakan untuk mendeteksi tag RFID pemilik rumah diletakkan di bagian atas prototype pos jaga dan RFID reader yang digunakan untuk membaca tag RFID milik tamu diletakkan di sisi kanan dan kiri pos.
[image:59.595.86.522.212.627.2]
Gambar 4.3. Mobil Mendekati RFID Reader Gambar 4.4. Tag RFID Terdeteksi
Gambar 4.5. Portal Terbuka Sesaat Tag RFID Terdeteksi
4.2. Hasil Perancangan Perangkat Keras
4.2.1. Pengaturan Sudut Motor Servo
Pengujian sudut servo diukur dengan menggunakan busur derajat seperti pada gambar 4.6 sampai dengan gambar 4.8 di bawah ini. Pada perancangan motor servo di bab III, untuk dapat menggerakkan motor servo sesuai dengan sudut yang diinginkan dilakukan pengaturan nilai PWM dalam program CodeVision AVR tetapi dalam implementasinya digunakan 3 buah metode untuk dapat menentukan metode manakah yang lebih baik. Hal ini dikarenakan pada saat pembuatan hardware, penulis mengganti jenis mikrontroler yang awalnya AVR ATMega32 menjadi Arduino Mega2560. Ketiga metode tersebut adalah mengatur nilai PWM, mengatur nilau pulsa berdasarkan delay kedua metode ini diuji dengan menggunakan AVR ATMega32 dan menentukan sudut secara langsung pada program diuji pada Arduino Mega 2560.
Pengujian pertama yakni dengan menentukan nilai PWM dilakukan dengan memberikan nilai OCR sesuai dengan perhitungan teori pada bab III, pengujian dan pengamatan ini dilakukan 2 kali percobaan untuk sudut 0° dan sudut 90°. Berdasarkan pengamatan motor servo yang dikendalikan menggunakan AVR ATMega32 menghasilkan nilai OCR yang berbeda dengan nilai OCR yang dihitung secara teori terlihat pada tabel 4.1 di bawah ini. Perhitungan nilai error diperoleh dengan membandingkan selisih nilai OCR prakterk dan nilai OCR teori dengan nilai OCR teori, kemudian dikalikan 100%.
Tabel 4.1. Perhitungan Error Lebar Pulsa Motor Servo Standar SUDUT Nilai OCR
Teori
Nilai OCR
Praktek Error
0° 43,2 45 4,17 %
90° 64,8 78 20,37 %
Karena nilai OCR yang didapatkan berbeda-beda setiap kali dilakukan pengujian sudut dan nilainya untuk setiap motor servo juga berbeda kemudian dilakukan metode kedua yakni memberikan nilai pulsa berdasarkan delay untuk mengendalikan sudut motor servo.
Nilai pulsa yang diberikan diambil dari lebar pulsa total standar servo yakni 2 ms kemudian diubah ke dalam delay microseconds agar memudahkan dalam menentukan nilai yang akan diberikan. Hasil pengujian motor servo dengan menggunakan lebar pulsa ditunjukkan oleh gambar 4.6 sampai dengan 4.8 diatas, pengujian dilakukan setiap kenaikan sudut 10° seperti data yang disajikan pada tabel 4.2 di bawah ini.
Tabel 4.2. Hasil Pengujian Motor Servo Dengan Pulsa
SUDUT PULSA SUDUT PULSA SUDUT PULSA
0° 1725 μs 70° 1200 μs 140° 700 μs
10° 1650 μs 80° 1150 μs 150° 650 μs
20° 1575 μs 90° 1075 μs 160° 550 μs
30° 1500 μs 100° 1000 μs 170° 500 μs
40° 1425 μs 110° 900 μs 180° 400 μs
50° 1350 μs 120° 850 μs
60° 1275 μs 130° 750 μs
[image:61.595.85.526.214.648.2]Berdasarkan hasil pengamatan ini diketahui bahwa perbandingan antara sudut yang dihasilkan dan lebar pulsa yang diberikan adalah berbanding terbalik, seperti terlihat padda gambar 4.9 bahwa semakin lebar pulsa yang diberikan maka sudut yang terbentuk semakin kecil.
Gambar 4.9. Grafik Linearitas Sudut Terhadap Lebar Pulsa
Akan tetapi dengan menggunakan metode yang kedua ini sangat berpengaruh pada waktu running keseluruhan program utama saat dijalankan dan tidak jarang saat program dijalankan kembali, gerak servo tidak sesuai dengan hasil pengamatan sebelumnya bahkan servo tidak bergerak sama sekali. Kemudian karena adanya pergantian jenis mikrokontroler
0 500 1000 1500 2000
0 50 100 150 200
L
ebar
P
uls
a
(us)
Sudut (°)
yang digunakan, maka digunakan metode ketiga yakni dengan menulis angka derajat secara langsung pada program. Dengan metode ketiga ini, hasil gerak sudut motor servo sesuai dengan yang diharapkan dan tidak berubah ubah nilainya untuk setiap device-nya seperti yang terjadi pada metode yang pertama serta tidak mengalami kendala pada saat keseluruhan program dijalankan seperti yang terjadi dengan menggunakan metode kedua, sehingga metode ketiga dianggap paling tepat digunakan dalam penelitian ini.
4.2.2. Pengaturan Jarak Kerja Sensor Photodiode
Pengujian sensor photodiode dilakukan dengan melihat jarak terjauh sensor mampu mendeteksi keberadaan benda yang ada di depan sensor, pengamatan dan pengujian dilakukan untuk menguji rangaian sensor yang telah dibuat dengan 2 metode yakni yang pertama dengan menentukan keluaran sensor berupa nyala LED dan yang kedua keluaran dari sensor sebagai masukan pada mikrokontroler atau dengan kata lain sensor diuji pada sistem secara keseluruhan.
Gambar 4.10 menunjukkan sensor photodiode yang dibuat, gambar 4.11 diambil saat pengujian dilakukan menggunakan LED sebagai hasil keluarannya. Pengujian dengan metode ini menggunakan nyala LED sebagai indicator sensor bekerja atau tidak, selain itu untuk menentukan jarak deteksi sensor dilakukan pengamatan nyala LED saat bagian depan sensor diberi penghalang sampai jarak beberapa sentimeter sampai LED tidak menyala lagi, hasilnya dapat dilihat pada tabel 4.3 dan 4.4 secara berurutan untuk 2 buah rangkaian sensor yang
![Gambar 2.11. Mode Phase Correct PWM [23]](https://thumb-ap.123doks.com/thumbv2/123dok/900903.597820/37.595.82.528.160.754/gambar-mode-phase-correct-pwm.webp)