BAB 3 PEMBAHASAN
Pada bab sebelumnya telah dibahas teori-teori yang akan digunakan untuk menyelesaikan masalah program linier parametrik. Pada bab ini akan diperlihatkan suatu prosedur yang lengkap untuk menyelesaikan masalah program linier parametrik.
3.1 Prosedur Penyelesaian Masalah Program Linier Parametrik
Masalah program linier parametrik terdiri oleh 2 bagian masalah. Masalah pertama adalah perubahan kontinu parameter pada koefisien fungsi tujuan
( )
cj dan masalah kedua adalah perubahan kontinu parameter konstan sisi kanan ( ini menunjukkan nilai kuantitas batasan ). Oleh karena itu, prosedur penyelesaian masalah program linier dibedakan menjadi 2 bagian berikut.3.1.1 Prosedur Penyelesaian untuk perubahan kontinu parameter cj
Untuk kasus perubahan kontinu pada parameter koefisien tujuan, permasalahan dalam bentuk skalar Minimum
( )
∑
(
)
= + = n j j j j x c z 1 θ α θ Dengan kendala i n j j ijx b a =∑
=1 , i=1,2,...,m xj ≥0,j =1,2,...,n dan dalam bentuk matrik dinyatakan oleh Minimum z=(
c+αθ)
TxDengan kendala Ax= b x≥0
akan diperiksa, di mana parameter θ diperkenankan mencakup semua nilai positif dan negatif.
Anggap bahwa program linier diselesaikan dengan θ =0 sehingga fungsi
tujuan
( )
∑
(
)
∑
= = = + = n j j j n j j j j x c x c z 1 1 θ α θ atau z =(
c+αθ)
Tx =cTxTeknik dari analisis sensitivitas akan digunakan untuk menguji bagaimana solusi berubah ketika θ diubah dari nol. Jika basis sekarang tetap optimal, maka solusi basis optimal sekarang xB =B−1b tidak akan berubah. Oleh karena itu hanya kondisi optimal yang perlu diperiksa. Untuk masalah pengganggu, mereka adalah
(
c +)
−(
cB + B)
TB−1N ≥0 T N N α θ α θ atau(
B N) (
c c B N)
T B T N T B T N 1 1 − − ≥− − −α α θ , di mana α dan N Bα menyatakan gangguan-gangguan pada c dan N c secara B berturut-turut. Ketidaksamaan ini harus dipenuhi untuk setiap komponen dalam tes keoptimalan.
Koefisien pada sisi sebelah kanan yaitu harga reduksi metode simplex
memenuhi 1 0 ^ ≥ − = − N B c c c TN TB T
N karena basis sekarang diasumsikan optimal. Untuk 0
>
θ , ketidaksamaan hanya diperhatikan ketika
(
αTN −αTBB−1N)
i <0. Sebagai suatu hasil, θ dapat dinaikkan hingga nilai(
)
(
) (
)
< − − − − = − − − − 0 : min 1 1 1 i T B T N i T B T N i T B T N i B N c B N N B c c α α α α θsebelum basis sekarang berhenti menjadi optimal. Untuk θ >θ− basis berubah dan indeks i yang menentukan θ spesifik variabel masuk untuk metode simplex. Sama − halnya, untuk θ <0, itu mungkin untuk menurunkan θ hingga nilai
(
)
(
) (
)
> − − − − = − − − − max : 0 1 1 1 i T B T N i T B T N i T B T N i B N B N N B c c α α α α θsebelum basis sekarang berhenti menjadi optimal. Lagi, indeks i yang menentukan
−
θ spesifik untuk variabel masuk.
Untuk ∈ θ θ−
θ , harga reduksi variabel nonbasis diperlihatkan oleh formula
(
− −)
+ N B c c BT T N 1(
)
N B T B T N 1 − −α αθ . Nilai tujuan parametrik ditunjukkan oleh
( ) ( )
BT Bx z
zθ = 0 +θα di mana z
( )
0 adalah nilai tujuan untuk masalah dengan θ =0. Jika, ketika percobaan menghitung θ , di sana tidak ada indeks yang memenuhi −(
− BT −1)
i <0 TN α B N
α maka θ dapat dinaikkan tanpa batas dengan basis sekarang tetap optimal. Jika, ketika penggunaan metode simplex untuk menentukan basis baru pada
−
θ , di sana tidak ada variabel keluar, maka program linier tidak terbatas untuk θ >θ−. Sama halnya, jika tidak ada indeks yang memenuhi
(
− −1)
>0i T B T N α B N α maka θ
dapat diturunkan tanpa batas dengan basis sekarang tetap optimal. Jika tidak ada variabel keluar pada
−
θ , maka program linier tidak terbatas untuk
−
>θ
θ .
Prosedur di atas dapat disimpulkan sebagai berikut.
1. Ubah masalah program linier parametrik ke dalam bentuk standar. 2. Selesaikan masalah dengan θ =0 oleh metode simplex.
3. Gunakan prosedur analisis sensitivitas ( pada kasus perubahan parameter koefisien fungsi tujuan ) untuk memperkenalkan ∆cj =αjθ ke dalam fungsi tujuan.
4. Naikkan atau turunkan θ hingga nilai tertentu sebelum kondisi optimal dilanggar atau hingga variabel nonbasis yang memiliki koefisien pada fungsi tujuan menjadi negatif.
5. Gunakan variabel ini sebagai variabel basis yang masuk untuk iterasi metode simplex selanjutnya sehingga solusi optimal baru ditemukan. Kembali ke langkah 4.
Prosedur Penyelesaian untuk perubahan kontinu parameter b i
Untuk kasus perubahan kontinu pada parameter b , bentuk masalah dalam skalar i Minimum
( )
∑
= = n j j jx c z 1 θ Dengan kendala θ αi i n j j ijx b a = +∑
=1 , i=1,2,...,m xj ≥0, j =1,2,...,ndan dalam bentuk matrix dinyatakan oleh Minimum z=cTx
dengan kendala Ax= b+αθ x≥0
akan diperiksa, di mana parameter θ diperkenankan mencakup semua nilai positif dan negatif. Suatu teknik yang sama dengan prosedur penyelesaian perubahan kontinu parameter koefisien tujuan dapat dikembangkan untuk menyelesaikan masalah ini.
Anggap bahwa program linier diselesaikan dengan θ =0 sehinga konstanta
sisi kanan i i i n j j ijx b b a = + =
∑
= θ α 1atau Ax=b+αθ =b. Teknik dari analisis sensitivitas akan digunakan untuk menguji bagaimana solusi berubah ketika θ diubah dari nol. Jika basis sekarang tetap layak, maka solusi basis optimal sekarang
0 1 ^ ≥ − = − N B c c c TN TB T
N tidak akan berubah. Oleh karena itu, hanya kondisi layak yang perlu diperiksa.
Pada masalah pengganggu, kondisi solusi layak basis akan tetap terpenuhi sepanjang B−1
(
b+αθ)
≥0 atau ekivalen sepanjang −1 ≥ B− −1αθb
B . Ketidaksamaan
ini harus dipenuhi untuk setiap komponen dalam tes kelayakan. Basis sekarang memenuhi B−1b≥0 karena untuk setiap komponen basis sekarang diasumsikan menjadi layak. Untuk θ >0, ketidaksamaan hanya diperhatikan ketika
(
B−1α)
i <0. Sebagai suatu hasil, θ dapat dinaikkan hingga nilai( )
(
) (
)
< − = − − − − 0 : min 1 1 1 i i i i B B b B α α θsebelum basis sekarang berhenti menjadi layak. Untuk θ >θ−, basis berubah, dan indeks i yang menetukan θ spesifik variabel masuk untuk metode simplex. Sama − halnya, untuk θ <0, itu mungkin untuk menurunkan θ hingga nilai
( )
(
) (
)
> − = − − − − max : 0 1 1 1 i i i i B B b B α α θsebelum basis sekarang berhenti menjadi layak. Lagi, indeks i yang menentukan
−
θ spesifik untuk variabel masuk.
Untuk ∈ θ θ−
θ , , nilai solusi basis diperlihatkan oleh formula
α θ 1 1 − − − + =B b B
x . Nilai fungsi tujuan ditunjukkan oleh :
( )
θ = −1 + θ −1α B c b B c z TB TB( )
θ 1α 0 + − = z cTBBdi mana z
( )
0 adalah nilai tujuan untuk masalah dengan θ =0. Jika, ketika percobaan menghitung θ , di sana tidak ada indeks − i yang memenuhi(
−1)
<0i
B α maka θ dapat dinaikkan tanpa batas dengan basis sekarang tetap layak dan optimal. Jika, ketika penggunaan metode simplex untuk menentukan basis baru pada θ , di sana tidak ada − variabel keluar, maka program linier tidak terbatas untuk θ >θ−. Sama halnya, jika tidak ada indeks yang memenuhi
(
−1)
>0i
B α maka θ dapat diturunkan tanpa batas dengan basis sekarang tetap layak. Jika tidak ada variabel keluar pada
−
program linier tidak terbatas untuk
−
<θ
θ . Metode dual simplex juga dapat dipakai untuk menemukan solusi basis untuk tiap-tiap titik kritis θ sehingga solusi layak dan optimal dapat diperoleh.
Kesimpulan prosedur penyelesaian masalah perubahan konstan sisi kanan adalah sebagai berikut.
1. Ubah masalah program linier parametrik ke dalam bentuk standar. 2. Selesaikan masalah dengan θ =0 oleh metode simplex.
3. Gunakan prosedur analisis sensitivitas pada kasus perubahan konstan sisi kanan untuk memperkenalkan ∆bi =αiθ .
4. Naikkan atau turunkan θ hingga nilai tertentu sebelum kondisi layak dilanggar atau sebelum nilai di kolom sisi kanan menjadi negatif.
5. Gunakan variabel ini sebagai variabel masuk untuk suatu iterasi metode dual simplex selanjutnya untuk menemukan solusi optimal baru. Kembali ke langkah 4.
3.2 Penyelesaian Contoh Masalah Program Linier Parametrik
3.2.1 Pada Kasus Perubahan Kontinu Parameter cj
Pada kasus ini, masalah dibatasi dengan dua variabel keputusan pada fungsi tujuan.
Maksimum
( ) (
)
(
)
2 1 5 2 3 x x zθ = + θ + −θ Dengan kendala 1 x ≤4 2 2x ≤12 18 2 3x1+ x2 ≤ Dan 1 x ≥ , 0 x2 ≥0Langkah 1.
Masalah dalam bentuk standar menjadi :
Minimum −z
( ) ( ) (
θ =z^θ = −3−2θ)
x1+(
−5+θ)
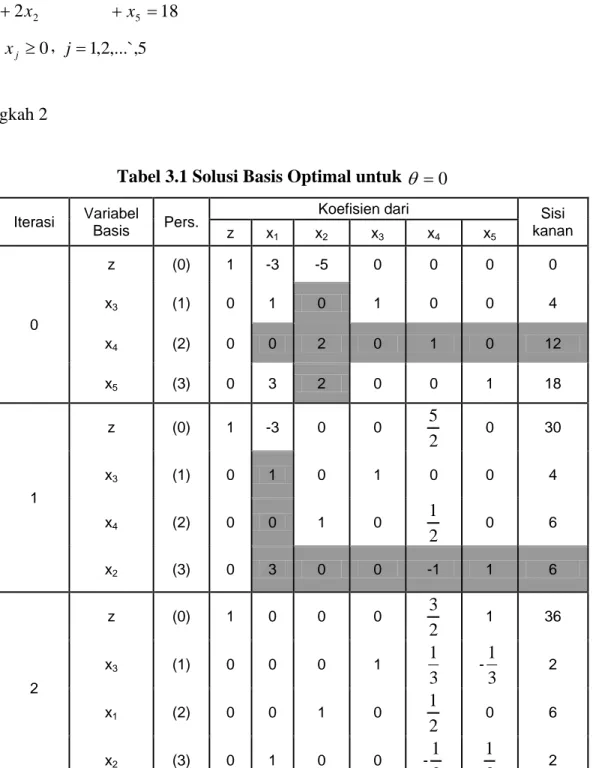
x2 Dengan kendala 1 x + x3 =4 2 2x + x4 =12 2 1 2 3x + x + x5 =18 dan xj ≥0, j =1,2,...`,5 Langkah 2Tabel 3.1 Solusi Basis Optimal untuk θ =0
Iterasi Variabel
Basis Pers.
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 0 z (0) 1 -3 -5 0 0 0 0 x3 (1) 0 1 0 1 0 0 4 x4 (2) 0 0 2 0 1 0 12 x5 (3) 0 3 2 0 0 1 18 1 z (0) 1 -3 0 0 2 5 0 30 x3 (1) 0 1 0 1 0 0 4 x4 (2) 0 0 1 0 2 1 0 6 x2 (3) 0 3 0 0 -1 1 6 2 z (0) 1 0 0 0 2 3 1 36 x3 (1) 0 0 0 1 3 1 -3 1 2 x1 (2) 0 0 1 0 2 1 0 6 x2 (3) 0 1 0 0 -3 1 3 1 2
Langkah 3
Dengan menggunakan analisis sensitivitas pada kasus perubahan parameter koefisien fungsi tujuan akan diperkenalkan ∆cj =αjθ
=
c
[
−3 −5 0 0 0]
Tdan α =
[
−2 1 0 0 0]
T Solusi basis optimal sekarang[
]
TB x x x
x = 3 2 1 , αB =
[
0 1 −2]
T dan =N
α
[
0 0]
TDengan variabel basis optimal sekarang maka nilai interval θ dapat dihitung.
[
] [
]
=− − − − − = − = − 3 2 6 7 3 1 3 1 0 0 2 1 0 3 1 3 1 1 2 1 0 0 0 1 ^ N B T B T N T N α α α dan ^ ≥0 T Nc . Karena ada entri yang memenuhi
(
− BT −1)
i >0 T N α B N α dan(
− BT −1)
i <0 T N α B Nα pada basis optimal sekarang maka θ dapat dinaikkan atau diturunkan nilainya untuk iterasi metode simplex selanjutnya. Untuk solusi basis optimal sekarang, batas atas θ :
(
)
(
) (
)
< − − − − = − − − − 0 : min 1 1 1 i T B T N i T B T N i T B T N i B N B N N B c c α α α α θ 7 9 6 7 2 3 min = − − = idan batas bawah θ :
(
)
(
) (
)
> − − − − = − − − − : 0 1 1 1 i T B T N i T B T N i T B T N i B N B N N B c c maks α α α α θ 2 3 3 2 1 − = − = i maksHarga reduksi nonbasis dan nilai fungsi tujuan secara berurutan menjadi − + = − + = + = θα θ θ θ 3 2 1 6 7 2 3 3 2 6 7 1 2 3 ^ ^ T N T N T N c c
( ) (
θ θ)
θα θ[
]
36 2θ 2 6 2 2 1 0 36 0 ^ ^ + − = − + − = + = = T B B Bc x z z( )
θ( )
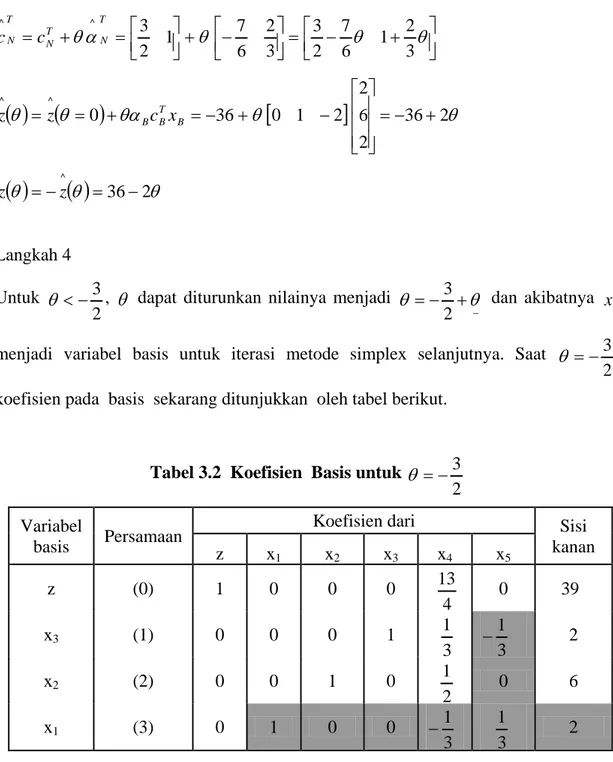
θ 36 2θ ^ − = − = z z Langkah 4 Untuk 2 3 − <θ , θ dapat diturunkan nilainya menjadi
− + − = θ θ 2 3 dan akibatnya 5 x
menjadi variabel basis untuk iterasi metode simplex selanjutnya. Saat
2 3 − =
θ ,
koefisien pada basis sekarang ditunjukkan oleh tabel berikut.
Tabel 3.2 Koefisien Basis untuk
2 3 − = θ Variabel basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z (0) 1 0 0 0 4 13 0 39 x3 (1) 0 0 0 1 3 1 3 1 − 2 x2 (2) 0 0 1 0 2 1 0 6 x1 (3) 0 1 0 0 3 1 − 3 1 2
Langkah 5
Setelah operasi pivot, solusi optimal yang baru menjadi : Tabel 3.3 Solusi Basis Optimal untuk
2 3 − < θ Variabel basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z (0) 1 0 0 0 4 13 0 39 x3 (1) 0 1 0 1 0 0 4 x2 (2) 0 0 1 0 2 1 0 6 x5 (3) 0 3 0 0 -1 1 6
Dengan variabel basis ini diperoleh nilai :
= T N ^ α
[
] [
]
=− − − − − 2 1 2 0 3 1 0 0 1 1 1 0 0 2 1 0 0 0 1 0 1 0 0 2 dan 0 ^ ≥ T N c .Karena tidak ada entri yang memenuhi
(
αNT −αTBB−1N)
i >0 maka θ dapat diturunkan tanpa batas dengan solusi basis saat ini. Harga reduksi nonbasis dan nilai fungsi tujuan : − − − = − − + + = 2 5 2 3 2 1 2 2 3 4 13 0 ^ θ θ θ T N c( )
θ θ θ[
]
30 6θ 6 6 4 0 1 0 2 3 2 3 ^ ^ + − = + + =− = z z( )
θ( )
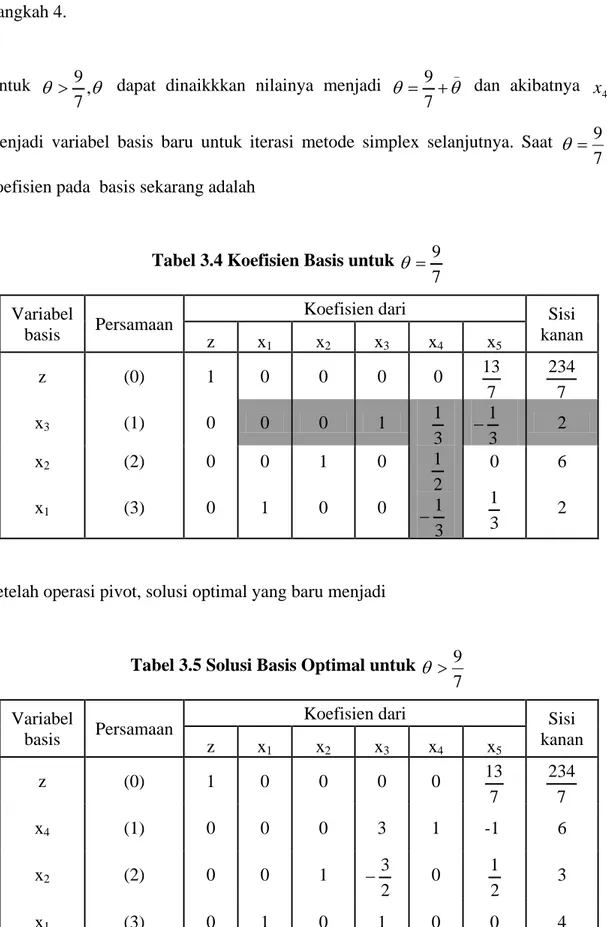
θ 30 6θ ^ − = − = z zLangkah 4.
Untuk θ ,θ 7 9
> dapat dinaikkkan nilainya menjadi _ 7 9 θ
θ = + dan akibatnya
4
x
menjadi variabel basis baru untuk iterasi metode simplex selanjutnya. Saat 7 9 =
θ ,
koefisien pada basis sekarang adalah
Tabel 3.4 Koefisien Basis untuk 7 9 = θ Variabel basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z (0) 1 0 0 0 0 7 13 7 234 x3 (1) 0 0 0 1 3 1 2 1 3 1 − 3 1 − 2 x2 (2) 0 0 1 0 0 6 x1 (3) 0 1 0 0 3 1 2
Setelah operasi pivot, solusi optimal yang baru menjadi
Tabel 3.5 Solusi Basis Optimal untuk 7 9 > θ Variabel basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z (0) 1 0 0 0 0 7 13 7 234 x4 (1) 0 0 0 3 1 -1 6 x2 (2) 0 0 1 2 3 − 0 2 1 3 x1 (3) 0 1 0 1 0 0 4
Dengan variabel basis ini diperoleh nilai : = T N ^ α
[
] [
]
= − − − − − 2 1 2 7 0 0 1 0 0 1 0 0 1 2 1 0 2 3 1 1 3 2 1 0 0 0 dan 0 ^ ≥ T N c .Karena ada entri yang memenuhi
(
αNT −αTBB−1N)
i <0 maka θ dapat dinaikkan hingga: 7 26 2 1 7 13 min = − − = − i θHarga reduksi nonbasis dan nilai fungsi tujuan :
− + − = − − + = 2 5 2 7 9 2 1 2 7 7 9 7 13 0 ^ θ θ θ T N c
( )
θ θ θ[
]
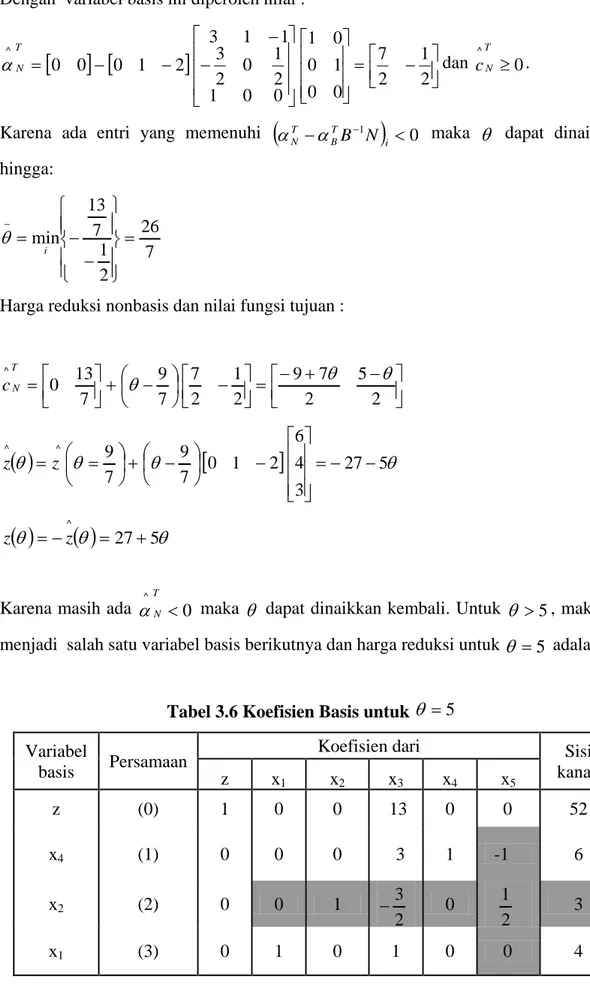
27 5θ 3 4 6 2 1 0 7 9 7 9 ^ ^ − − = − − + = = z zKarena masih ada 0
^
< T N
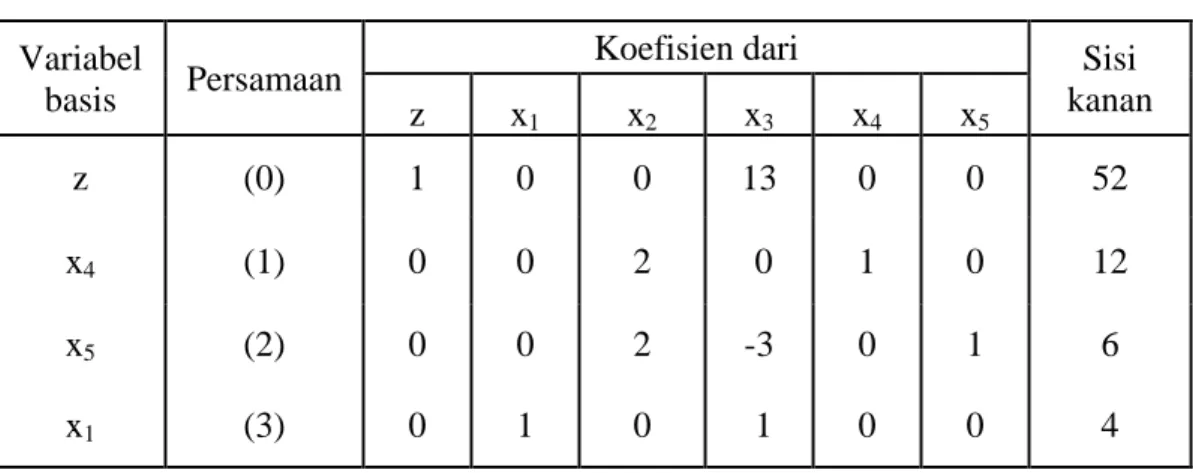
α maka θ dapat dinaikkan kembali. Untuk θ >5, maka x 5 menjadi salah satu variabel basis berikutnya dan harga reduksi untuk θ =5 adalah
Tabel 3.6 Koefisien Basis untuk θ =5 Variabel
basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z (0) 1 0 0 13 0 0 52 x4 (1) 0 0 0 3 1 -1 6 x2 (2) 0 0 1 2 3 − 0 2 1 3 x1 (3) 0 1 0 1 0 0 4
( )
θ( )
θ 27 5θ ^ + = − = z zSetelah operasi pivot, solusi optimal yang baru adalah :
Tabel 3.7 Solusi Basis Optimal untuk θ >5 Variabel
basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z (0) 1 0 0 13 0 0 52 x4 (1) 0 0 2 0 1 0 12 x5 (2) 0 0 2 -3 0 1 6 x1 (3) 0 1 0 1 0 0 4
Dengan variabel basis ini diperoleh nilai :
= T N ^ α
[
] [
]
[
1 2]
0 2 1 2 0 0 0 0 1 1 0 3 0 1 0 2 0 0 0 1 = − − − dan ^ ≥0 T N c .Karena tidak ada entri yang memenuhi
(
− −1)
<0i T
B T
N α B N
α maka θ dapat dinaikkan
tanpa batas. Harga reduksi nonbasis dan nilai fungsi tujuan :
[
0 13]
(
θ 5)
[
1 2] [
5 θ 3 2θ]
^ + + − = − + = T N c( )
θ(
θ) (
θ)
[
]
12 8θ 4 6 12 2 00 0 5 5 ^ ^ − − = − − + = = z z( )
θ( )
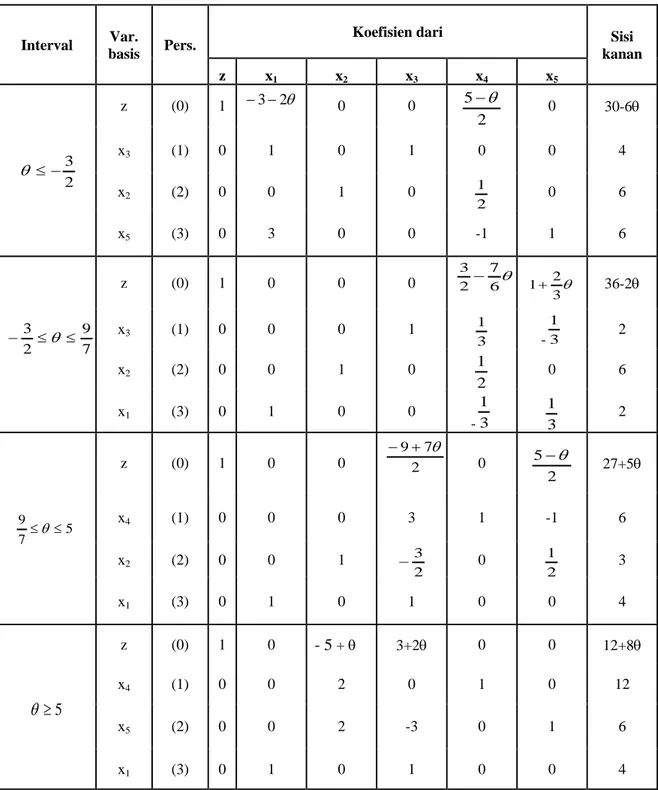
θ 12 8θ ^ + = − = z zTabel 3.8 Pemakaian Prosedur Program Linier Parametrik cj
Interval Var.
basis Pers.
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 2 3 − ≤ θ z (0) 1 −3−2θ 0 0 2 5−θ 0 30-6θ x3 (1) 0 1 0 1 0 0 4 x2 (2) 0 0 1 0 2 1 0 6 x5 (3) 0 3 0 0 -1 1 6 7 9 2 3 ≤ ≤ − θ z (0) 1 0 0 0 6θ 7 2 3 − θ 3 2 1+ 36-2θ x3 (1) 0 0 0 1 3 1 -3 1 2 x2 (2) 0 0 1 0 2 1 0 6 x1 (3) 0 1 0 0 -3 1 3 1 2 5 7 9≤θ ≤ z (0) 1 0 0 2 7 9+ θ − 0 2 5−θ 27+5θ x4 (1) 0 0 0 3 1 -1 6 x2 (2) 0 0 1 2 3 − 0 2 1 3 x1 (3) 0 1 0 1 0 0 4 5 ≥ θ z (0) 1 0 - 5 + θ 3+2θ 0 0 12+8θ x4 (1) 0 0 2 0 1 0 12 x5 (2) 0 0 2 -3 0 1 6 x1 (3) 0 1 0 1 0 0 4
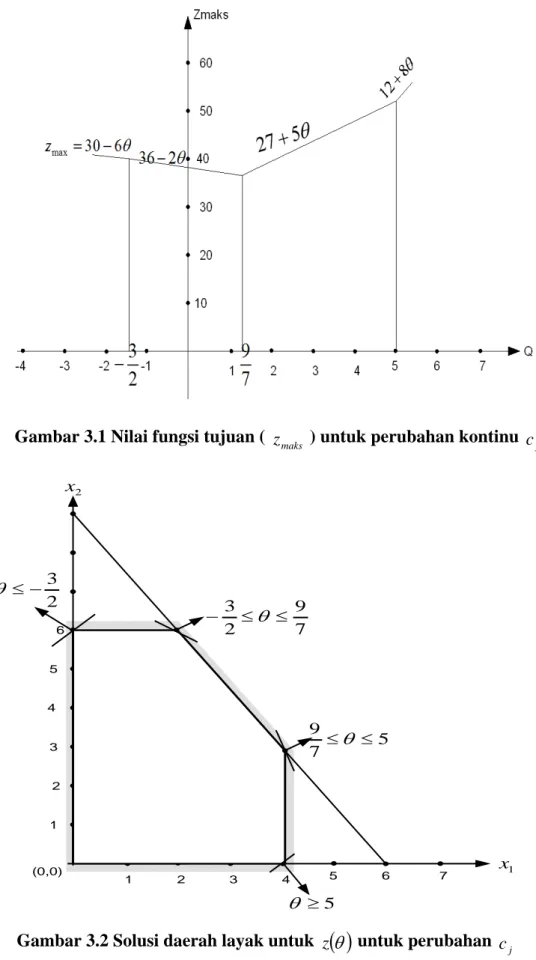
Gambar 3.1 Nilai fungsi tujuan ( zmaks ) untuk perubahan kontinu cj
Gambar 3.2 Solusi daerah layak untuk z
( )
θ untuk perubahan cj1 2 3 4 5 6 7 1 2 3 4 5 6 5 7 9 ≤θ ≤ 7 9 2 3 ≤ ≤ − θ 2 3 − ≤ θ 1 x 5 ≥ θ 2 x (0,0)
3.2.2 Pada Kasus Perubahan Kontinu Parameter b i
Pada kasus ini, masalah juga dibatasi dengan dua variabel keputusan pada fungsi tujuan. Maksimum 2 1 5 4x x z= + Dengan kendala : 2x1+ x2 ≤8+2θ θ 7 7 2 2 1+ x ≤ + x θ 2 3 2 ≤ + x x1 ≥0, x2 ≥0 Langkah 1
Masalah dalam bentuk standar menjadi
Minimum 1 2 ^ 5 4x x z z = =− − − Dengan kendala 2x1+x2+x3 =8+2θ x1+2x2 +x4 =7+7θ x 2 + x5 =3+2θ xj ≥0, j =1,2,...,5
Langkah 2
Tabel 3.9 Solusi Basis Optimal untuk θ =0 Iterasi Var.
basis Pers.
Koefisien dari Sisi
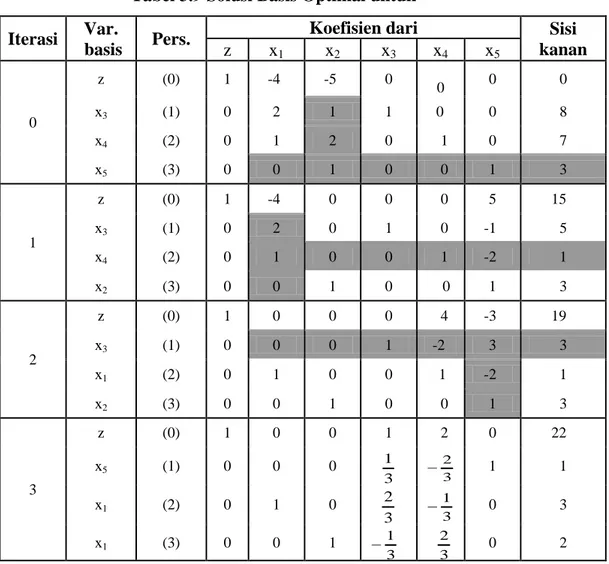
kanan z x1 x2 x3 x4 x5 0 z (0) 1 -4 -5 0 0 0 0 x3 (1) 0 2 1 1 0 0 8 x4 (2) 0 1 2 0 1 0 7 x5 (3) 0 0 1 0 0 1 3 1 z (0) 1 -4 0 0 0 5 15 x3 (1) 0 2 0 1 0 -1 5 x4 (2) 0 1 0 0 1 -2 1 x2 (3) 0 0 1 0 0 1 3 2 z (0) 1 0 0 0 4 -3 19 x3 (1) 0 0 0 1 -2 3 3 x1 (2) 0 1 0 0 1 -2 1 x2 (3) 0 0 1 0 0 1 3 3 z (0) 1 0 0 1 2 0 22 x5 (1) 0 0 0 3 1 3 2 − 1 1 x1 (2) 0 1 0 3 2 3 1 − 0 3 x1 (3) 0 0 1 3 1 − 3 2 0 2 Langkah 3
Dengan menggunakan analisis sensitivitas pada kasus perubahan konstan sisi kanan akan diperkenalkan ∆bi =αiθ.
[
]
Tb= 8 7 3 dan α =
[
2 7 2]
TArus solusi basis optimal yaitu
[
]
TB x x x
x = 5 1 2 dan nilai B
x ini akan berubah menjadi ^ = +θ −1α
B x xB B
− − = − − − = − 4 1 2 2 7 2 0 3 2 3 1 0 3 1 3 2 1 3 2 3 1 1α B
Karena ada entri yang memenuhi
(
−1)
<0i
B α dan
(
B−1α)
i >0 maka θ dapat dinaikkan dan diturunkan nilainya hingga nilai tertentu. Untuk solusi basis optimal sekarang, batas atas θ adalah
( ) ( )
2 1 1 3 , 2 1 min = − − − − = idan nilai batas bawah θ adalah
( )
(
) (
)
> − = − − − − max : 0 1 1 1 i i i i B B b B α α θ − =− = 2 1 4 2 i maksHarga reduksi nonbasis T ≥0 N
c . Harga sisi kanan dan nilai fungsi tujuan : α θ 1 ^ − + = x B xB B + − − = − − + = θ θ θ θ 4 2 3 2 1 4 1 2 2 3 1
( ) ( )
θ θ α θ[
]
22 16θ 4 1 2 5 4 0 22 0 1 ^ − − = − − − − + − = + = − B c z z TB( )
θ( )
θ 22 16θ ^ + = − = z z Langkah 4 Karena ada(
−1)
<0 iB α maka θ dapat dinaikkan nilainya menjadi lebih besar dari sekarang. Untuk
2 1 =
θ , nilai sisi kanan menjadi :
( )
(
) (
)
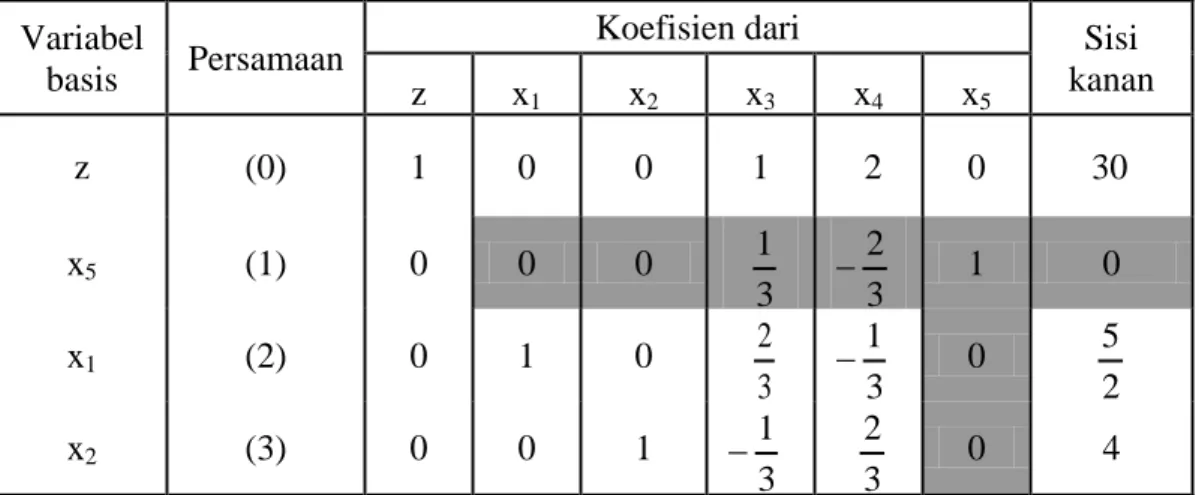
< − = − − − − 0 : min 1 1 1 i i i i B B b B α α θTabel 3.10 Nilai Sisi Kanan untuk 2 1 = θ Variabel basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z (0) 1 0 0 1 2 0 30 x5 (1) 0 0 0 3 1 3 2 − 1 0 x1 (2) 0 1 0 3 2 3 1 − 0 2 5 x2 (3) 0 0 1 3 1 − 3 2 0 4
dan setelah operasi pivot dengan menggunakan metode dual simplex maka solusi optimal yang baru adalah
Tabel 3.11 Solusi Basis Optimal untuk 2 1 > θ Variabel basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z (0) 1 0 0 2 0 3 30 x4 (1) 0 0 0 2 1 − 1 2 3 − 0 x1 (2) 0 1 0 2 1 0 2 1 − 2 5 x2 (3) 0 0 1 0 0 1 4 = − − − = − 2 0 3 2 7 2 1 0 0 2 1 0 2 1 2 3 1 2 1 1α B dengan T ≥0 N c
Karena tidak ada entri yang memenuhi
(
B−1α)
i <0 maka θ dapat dinaikkan tanpa batas dengan harga solusi basis sekarang yang tetap layak.Harga sisi kanan dan nilai fungsi tujuan yang baru : B x ^ = + + − = − + = θ θ θ 2 3 2 5 3 2 3 2 0 3 2 1 4 2 5 0
( )
θ θ θ α θ[
]
25 10θ 2 0 3 5 4 0 2 1 30 2 1 1 ^ − − = − − − + − = + = = − − B c z z TB( )
θ( )
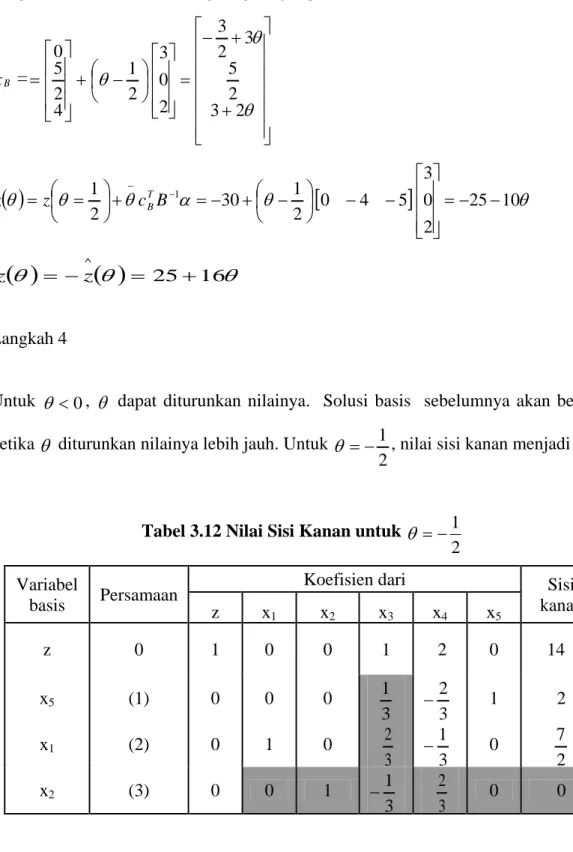
θ 25 16θ ^ + = − = z z Langkah 4Untuk θ <0, θ dapat diturunkan nilainya. Solusi basis sebelumnya akan berubah ketika θ diturunkan nilainya lebih jauh. Untuk
2 1 − =
θ , nilai sisi kanan menjadi :
Tabel 3.12 Nilai Sisi Kanan untuk
2 1 − = θ Variabel basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z 0 1 0 0 1 2 0 14 x5 (1) 0 0 0 3 1 3 2 − 1 2 x1 (2) 0 1 0 3 2 3 1 − 0 2 7 x2 (3) 0 0 1 3 1 − 3 2 0 0 Untuk − + − = θ θ 2 1
, setelah operasi pivot dengan menggunakan metode dual simplex maka solusi optimal yang baru adalah
Tabel 3.13 Solusi Basis Optimal untuk 2 1 − < θ Variabel basis Persamaan
Koefisien dari Sisi
kanan z x1 x2 x3 x4 x5 z 0 1 0 3 0 4 0 14 x5 (1) 0 0 1 0 0 1 2 x1 (2) 0 1 2 0 1 0 2 7 x3 (3) 0 0 -3 1 -2 0 0 − = − = − 12 7 2 2 7 2 0 2 1 0 1 0 1 0 0 1α B
Karena ada entri yang memenuhi
(
−1)
>0i
B α , maka θ dapat diturunkan nilainya hingga = − θ 2 1 7 2 7 , 2 2 − = − − i
maks dan harga reduksi nonbasis cTN ≥0.
Harga sisi kanan dan nilai fungsi tujuan yang baru :
− − + + = + + = + = − θ θ θ θ α θ 12 6 7 7 2 3 2 7 2 2 1 0 2 3 2 1 ^ B x xB B
( )
θ θ θ α θ[
]
28 28θ 12 7 2 0 4 0 2 1 30 2 1 1 ^ − − = − − + + − = + =− = − − B c z z TB( )
θ( )
θ 28 28θ ^ + = − = z zUntuk θ <−1, persamaan kedua tidak memenuhi syarat b≥0 sehingga θ tidak dapat diturunkan lagi nilainya dan oleh karena itu, iterasi dihentikan.
Tabel 3.14 Pemakaian Prosedur Program Linier Parametrik b i
Interval Vari.
Basis Pers.
Koefisien dari Sisi
Kanan z x1 x2 x3 x4 x5 2 1 1≤ ≤− − θ z (0) 1 0 3 0 4 0 28+28θ x5 (1) 0 0 1 0 0 1 3+2θ x1 (2) 0 1 2 0 1 0 7+7θ x3 (3) 0 0 -3 1 -2 0 -6-12θ 2 1 2 1 ≤ ≤ − θ z (0) 1 0 0 1 2 0 22+16θ x5 (1) 0 0 0 3 1 3 2 − 1 1-2θ x1 (2) 0 1 0 3 2 3 1 − 0 3-θ x2 (3) 0 0 1 3 1 − 3 2 0 2+4θ 2 1 ≥ θ z (0) 1 0 0 2 0 3 25+10θ x4 (1) 0 0 0 2 1 − 1 2 3 − 3θ 2 3 + − x1 (2) 0 1 0 2 1 0 2 1 − 2 5 x2 (3) 0 0 1 0 0 1 3+2θ
Gambar 3.3 Nilai fungsi tujuan ( zmaks ) untuk perubahan kontinu i b 1/2 1 -1/2 -1 10 20 30 40 Zmax
θ
10
25
+
θ
16
22
+
θ
28
28
max
=
+
Z
θ
Gambar 3.4 Solusi daerah layak z
( )
θ untuk perubahan b iVariasi solusi optimal yang dihasilkan dengan variabel keputusan asli pada perubahan kontinu parameter cj atau b dapat disimpulkan ke dalam kedua tabel berikut. i
Tabel 3.15 Variasi Solusi Optimal untuk Perubahan j c θ −∞ 2 3 − 7 9 5 +∞ x1 0 2 4 4 x2 6 6 3 0 z 30-6θ 36-2θ 27+5θ 12+8θ 1 2 3 1 2 3 0 III I II 1 − = θ 1 2 3 4 1 2 3 4 II III 2 / 1 − = θ I 1 2 3 4 5 1 2 3 4 II I III θ =−1/2 0 1 2 3 4 1 2 3 4 II III 0 = θ I 1 2 3 4 5 6 7 1 2 3 4 5 6 II I III 1 = θ 1 x 1 x 1 x 1 x 1 x 2 x 2 x 2 x 2 x 2 x
Tabel 3.15 Variasi Solusi Optimal untuk Perubahan b i θ -1 2 1 − 2 1 +∞ x1 7+7θ 3-θ 2 5 x2 0 2+4θ 3+2θ z 28+28θ 22+16θ 25+10θ
Kedua contoh masalah program linier parametrik ini diambil dari buku Introduction to Operations Research dan Linier and Nonlinier Programming dengan hasil optimal yang sama seperti pada Tabel 3.15 dan 3.16.
BAB 4
KESIMPULAN DAN SARAN
4.1 Kesimpulan
Masalah program linier parametrik dapat diselesaikan dengan menggunakan metode simplex kecuali pada kasus khusus, perubahan kontinu parameter b , di mana untuk i
i
b < 0 maka metode dual simplex turut digunakan untuk memperbaiki solusi optimal. Jadi dengan menggunakan metode simplex, masalah program linier parametrik dapat diselesaikan dengan mudah dan sederhana.
Pada program linier parametrik terjadi perubahan pada pada parameter cj atau i
b secara kontinu dan berurutan sehingga akhirnya menghasilkan variasi solusi optimal sesuai batas perubahan parameter yang diizinkan terjadi seperti pada tabel 3.15 dan tabel 3.16. Hal ini nantinya akan mempermudah para pengambil keputusan untuk mengambil keputusan terbaik atau disebut sebagai keputusan optimal, keputusan yang memberikan keuntungan maksimum.
Solusi masalah program linier parametrik dapat digunakan dalam berbagai kasus di dunia nyata seperti perencanaan produksi suatu produk dengan keterbatasan bahan mentah atau waktu dan perencanaan muatan barang pada pesawat udara dengan keterbatasan volume dan berat muatan tetapi ingin memperoleh hasil yang sebesar-besarnya.
4.2 Saran
Program linier parametrik hanya mencakup perubahan kontinu pada parameter cj atau i
b , tetapi ada juga bentuk analisis sensitivitas yang lain yaitu perubahan simultan pada struktur sistem kendala, perubahan pada koefisien aij. Bagi para pembaca yang
berminat untuk meneliti, mungkin dapat melanjutkan penelitian ini yang berhubungan dengan perubahan kontinu parameter aij.