STUDI PERANCANGAN
UNMANNED SURFACE ATTACK BOAT (USAB)
UKURAN 9 METER
Nama Mahasiswa : Rizki Hidayat NRP : 4206 100 005
Jurusan : Teknik Sistem Perkapalan
Dosen Pembimbing : Ir. Agoes Santoso M.Sc., M.Phil.,
Abstrak
Sebagai Negara kepulauan, Indonesia memiliki ribuan pulau yang terbentang dari Sabang – Merauke. Oleh karena itu, pemerintah khususnya TNI AL mengalami kesulitan dalam hal menjaga dan mengawasi keamanan tiap – tiap pulau tersebut karena membutuhkan sumber daya manusia (SDM) yang banyak dan memerlukan kapal berteknologi tinggi yang mampu memantau wilayah perairan di Indonesia secara menyeluruh. Atas dasar itu, muncul suatu konsep untuk mengatasi persoalan tersebut. Salah satu konsepnya adalah Unmanned Surface Vehicles (USV) atau lebih dikenal dengan sebutan kapal tanpa awak. Kapal ini merupakan kapal multifungsi,karena selain dapat berfungsi sebagai kapal patroli, juga dapat digunakan sebagai mesin penghancur target sasaran karena sudah dilengkapi dengan kamera berteknologi tinggi dan dapat pula dipersenjatai dengan rudal-rudal penghancur yang mempunyai daya ledak maksimal. Hasil dari pengerjaan skripsi ini berupa bentuk rancangan Lines Plan dan General Arrangement. Adapun dimensi pokok / ukuran utama hasil optimasi adalah : LOA=9,6m; LWL=7,62m; B=2,85m; T=0,65m; H=2,3m; Cb=0,32; Vs=40 knot; pada effisiensi 50% tahanan yang terjadi 8,33 kN dan daya yang dibutuhkan 580 HP.
Keyword : Unmanned Surface Vehicles (USV), Optimasi, Lines Plan, General Arrangement
PENDAHULUAN
Sebagai Negara kepulauan, Indonesia memiliki ribuan pulau yang terbentang dari Sabang – Merauke. Oleh karena itu, pemerintah khususnya TNI AL mengalami kesulitan dalam hal menjaga dan mengawasi keamanan tiap – tiap pulau tersebut karena membutuhkan sumber daya manusia (SDM)
yang banyak dan memerlukan kapal berteknologi tinggi yang mampu menghandle wilayah perairan di Indonesia secara menyeluruh.
Berhubungan dengan itu, Jurusan Teknik Sistem Perkapalan FTK - ITS berencana membuat sebuah desain kapal tanpa awak yang nantinya difungsikan sebagai kapal patroli cepat (unmanned fast patrol attacker) dengan ukuran panjang kapal 9 meter untuk beroperasi di wilayah perairan Indonesia. Dengan adanya kapal patroli tanpa awak tersebut, SDM yang dibutuhkan tidak begitu banyak dan efisiensi waktu pun akan meningkat.
Dalam pembuatan kapal tersebut terdapat beberapa langkah yang harus dilakukan, salah satunya ialah dengan melakukan riset terhadap kapal tersebut. Dengan tujuan agar pengoperasian dari kapal tanpa awak ini dapat beroperasi secara aman di wilayah operasi dengan kecepatan dinas yang direncanakan. Aman berarti memiliki stabilitas yang baik walaupun dengan kondisi perairan yang ekstrim. Pastinya hal yang perlu dilakukan agar tingkat kestabilitasan dari kapal tanpa awak ini tinggi ialah dengan membuat sebuah desain lambung (hull design) yang optimal.
Berdasarkan hal – hal tersebut, penulis membuat sebuah skripsi yang berjudul “Studi
Perancangan Unmanned Surface Attacker Boat (USAB) Ukuran 9 Meter”. Pada
pengerjaan skripsi ini akan dilakukan optimasi untuk mendapatkan principal dimension, perancangan lines plan dan general arrangement, perhitungan tahanan kapal dengan menggunakan metode Savitsky, serta analisa tingkat stabilitas dari kapal tersebut. Sehingga diharapkan dari pengerjaan skripsi ini akan mendapatkan sebuah USAB (unmanned surface attack boat) yang memiliki dimensi / ukuran yang sesuai, bentuk kapal dan stabilitas yang optimal agar dapat
menunjang performa pada saat beroperasi, serta memiliki tahanan yang akurat untuk jenis kapal cepat.
TINJAUAN PUSTAKA
Unmanned Surface Vehicles (USV)
Istilah Unmanned Surface Vehicle (USV) mengacu pada setiap kendaraan tanpa awak yang beroperasi di atas permukaan air. USV sendiri sudah mulai diuji coba sejak masa Perang Dunia II, namun sudah banyak diabaikan. Hal ini disebabkan oleh fakta bahwa USV telah diklasifikasikan sebagai Underwater Autonomous Vehicles (UAV). Keberhasilan baru-baru ini UAV dalam Perang Afghanistan dapat membuka jalan bagi USV sebagai teknologi baru dalam bidang maritim.Angkatan Laut Israel saat ini sudah mulai menggunakan Unmanned Surface Vehicle (USV). Hal tersebut karena USV dinilai cukup handal, cepat, dan sangat mudah digerakkan, yang memungkinkan mereka untuk melakukan berbagai misi, termasuk patroli pantai, tanpa membahayakan personil angkatan laut.
SeaStar Unmanned Surface Vehicle (USV) SeaStar mempersembahkan sebuah revolusi dalam bidang maritim dengan kemampuan kapal patroli tak berawak untuk seluruh Home-Land Security dan Naval Application. Sistem SeaStar USV adalah sebuah kapal tanpa awak yang dikendalikan dengan remote control yang mampu melaksanakan berbagai misi angkatan laut atau maritim.
SeaStar dilengkapi dengan sensor yang dibutuhkan untuk pengoperasian dari berbagai misi tertentu. SeaStar memiliki desain open-architecture system, yang dikendalikan oleh Aeronautics’ Unique dan Proved UMAS™ Multi-Application Command Control System, yang memungkinkan untuk : Integrasi-SeaStar ke setiap jaringan C4I Perintah & Pengendalian SeaStar dari
kendaraan darat, laut, udara, atau stasiun. "Plug & Play" integrasi dari setiap jenis
payload atau sistem senjata.
SeaStar adalah platform serbaguna untuk berbagai aplikasi.
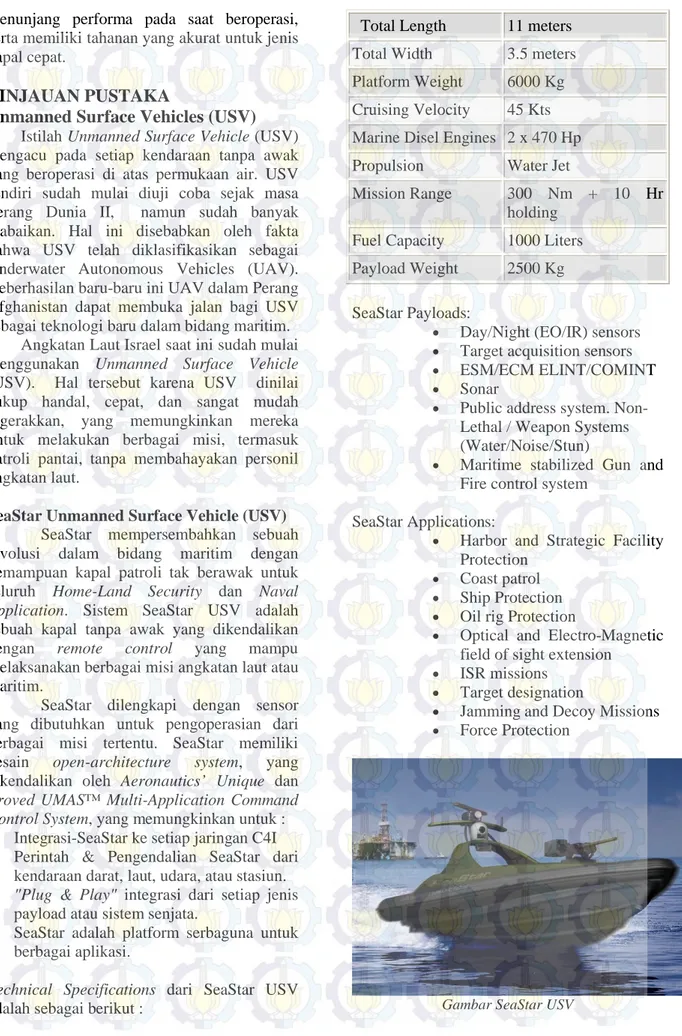
Technical Specifications dari SeaStar USV adalah sebagai berikut :
Total Length 11 meters Total Width 3.5 meters Platform Weight 6000 Kg Cruising Velocity 45 Kts Marine Disel Engines 2 x 470 Hp
Propulsion Water Jet
Mission Range 300 Nm + 10 Hr holding
Fuel Capacity 1000 Liters Payload Weight 2500 Kg SeaStar Payloads:
Day/Night (EO/IR) sensors Target acquisition sensors ESM/ECM ELINT/COMINT Sonar
Public address system. Non-Lethal / Weapon Systems (Water/Noise/Stun)
Maritime stabilized Gun and Fire control system
SeaStar Applications:
Harbor and Strategic Facility Protection
Coast patrol Ship Protection Oil rig Protection
Optical and Electro-Magnetic field of sight extension
ISR missions Target designation
Jamming and Decoy Missions Force Protection
Dasar-Dasar Bentuk Lambung Tunggal
(Monohull)
Speed Length Ratio (SLR)
Berdasarkan dari pertimbangan besar tahanan kapal pada kondisi perairan tenang (calm water resistance) hal yang paling utama dalam melakukan penentuan bentuk lambung yang tepat ialah berdasarkan perbandingan antara kecepatan dinas kapal (Service speed) dengan panjang garis air kapal (length of waterline). Dimana satuan kecepatan dalam knot dan panjang garis air dalam feet.
SLR = Vk /Lwl Dimana,
SLR = Speed length ratio Vk = Service Speed (Knot) Lwl = Panjang garis air (Feet) Hubungan Antara Gelombang Terhadap Bentuk Lambung
Pada umumnya kapal yang mengalir pada permukaan air, akan menghasilkan bentuk gelombang secara melintang yang berbeda-beda tergantung daripada bentuk lambung. Gelombang tersebut akan memiliki kecepatan aliran (Ck) yang besarnya sama dengan kecepatan dinas (Vk). Besar gelombang yang timbul dengan sendirinya akibat kecepatan kapal ini, memiliki sebuah konsekuensi yaitu timbulnya tahanan gelombang pada lambung kapal. Sedangkan karakteristik dari gelombang, sama dengan gelombang sinus dimana panjang gelombang (Lw) berhubungan dengan kecepatan aliran gelombang (Ck). Persamaan dari kecepatan aliran ialah :
Ck = 1,3Lw Dimana,
Ck = Kecepatan aliran (knot) Lw = Panjang gelombang (Feet)
Besar dari SLR untuk setiap gelombang selalu sama dengan 1,3 dari besar panjang gelombang tersebut. Untuk SLR dari kapal, bagaimanapun selalu bergantung dari panjang kapal tersebut serta kecepatan operasinya. Karena besar dari kecepatan aliran sama dengan besar kecepatan kapal maka muncullah sebuah persamaan antara panjang gelombang yang diakibatkan oleh kecepatan kapal terhadap panjang dari garis air (length of waterline) sebagai sebuah fungsi dari SLR.
80 , 1 2 SLR LwlLw
Berdasarkan percobaan yang dilakukan oleh Daniel Savitsky, mendapatkan sebuah hasil tabulasi sebagai berikut :
SLR Lw/LWL 0.94 0.50 1.10 0.67 1.16 0.75 1.34 1.00 1.90 2.00
Tabel Hasil Tabulasi Perbandingan Antara Panjang Gelombang Terhadap Panjang Garis Air
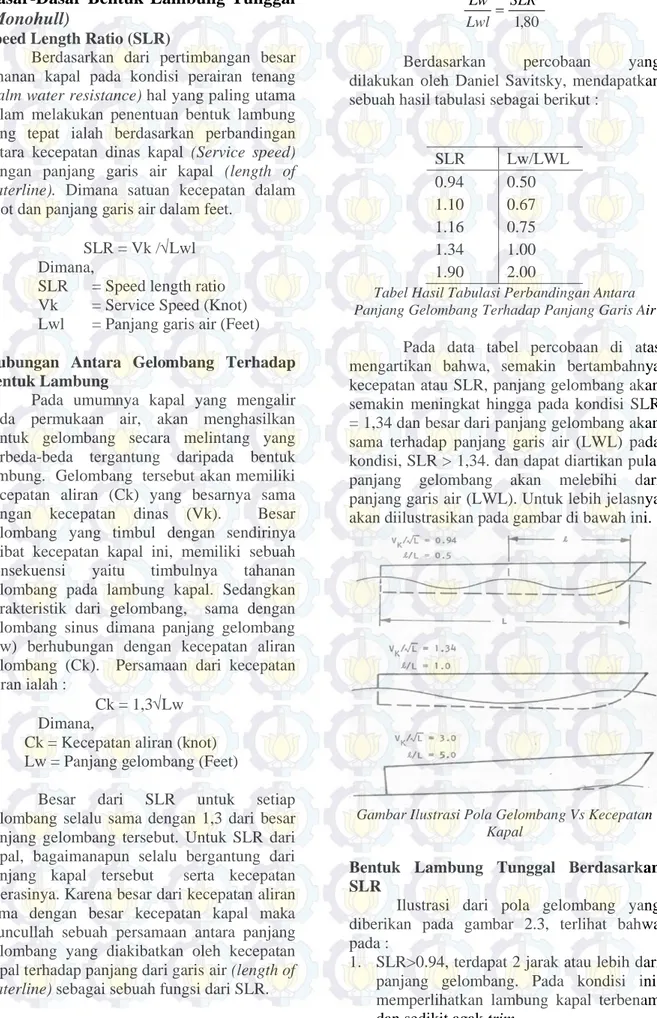
Pada data tabel percobaan di atas mengartikan bahwa, semakin bertambahnya kecepatan atau SLR, panjang gelombang akan semakin meningkat hingga pada kondisi SLR = 1,34 dan besar dari panjang gelombang akan sama terhadap panjang garis air (LWL) pada kondisi, SLR > 1,34. dan dapat diartikan pula, panjang gelombang akan melebihi dari panjang garis air (LWL). Untuk lebih jelasnya akan diilustrasikan pada gambar di bawah ini.
Gambar Ilustrasi Pola Gelombang Vs Kecepatan Kapal
Bentuk Lambung Tunggal Berdasarkan SLR
Ilustrasi dari pola gelombang yang diberikan pada gambar 2.3, terlihat bahwa pada :
1. SLR>0.94, terdapat 2 jarak atau lebih dari panjang gelombang. Pada kondisi ini, memperlihatkan lambung kapal terbenam dan sedikit agak trim.
2. SLR>1.34, besar panjang gelombang akan melebihi dari ukuran panjang lambung kapal, dan kapal sudah memulai pada tahap trim.
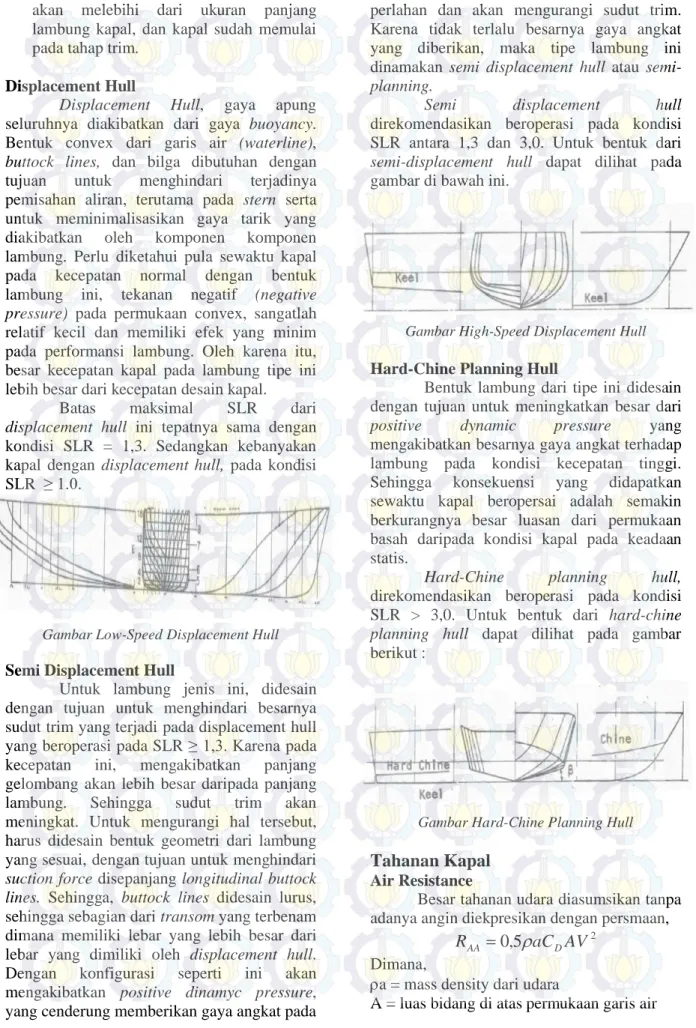
Displacement Hull
Displacement Hull, gaya apung seluruhnya diakibatkan dari gaya buoyancy. Bentuk convex dari garis air (waterline), buttock lines, dan bilga dibutuhan dengan tujuan untuk menghindari terjadinya pemisahan aliran, terutama pada stern serta untuk meminimalisasikan gaya tarik yang diakibatkan oleh komponen komponen lambung. Perlu diketahui pula sewaktu kapal pada kecepatan normal dengan bentuk lambung ini, tekanan negatif (negative pressure) pada permukaan convex, sangatlah relatif kecil dan memiliki efek yang minim pada performansi lambung. Oleh karena itu, besar kecepatan kapal pada lambung tipe ini lebih besar dari kecepatan desain kapal.
Batas maksimal SLR dari displacement hull ini tepatnya sama dengan kondisi SLR = 1,3. Sedangkan kebanyakan kapal dengan displacement hull, pada kondisi SLR ≥ 1.0.
Gambar Low-Speed Displacement Hull
Semi Displacement Hull
Untuk lambung jenis ini, didesain dengan tujuan untuk menghindari besarnya sudut trim yang terjadi pada displacement hull yang beroperasi pada SLR ≥ 1,3. Karena pada kecepatan ini, mengakibatkan panjang gelombang akan lebih besar daripada panjang lambung. Sehingga sudut trim akan meningkat. Untuk mengurangi hal tersebut, harus didesain bentuk geometri dari lambung yang sesuai, dengan tujuan untuk menghindari suction force disepanjang longitudinal buttock lines. Sehingga, buttock lines didesain lurus, sehingga sebagian dari transom yang terbenam dimana memiliki lebar yang lebih besar dari lebar yang dimiliki oleh displacement hull. Dengan konfigurasi seperti ini akan mengakibatkan positive dinamyc pressure, yang cenderung memberikan gaya angkat pada
bagian stern, menaikkan lambung secara perlahan dan akan mengurangi sudut trim. Karena tidak terlalu besarnya gaya angkat yang diberikan, maka tipe lambung ini dinamakan semi displacement hull atau semi-planning.
Semi displacement hull direkomendasikan beroperasi pada kondisi SLR antara 1,3 dan 3,0. Untuk bentuk dari semi-displacement hull dapat dilihat pada gambar di bawah ini.
Gambar High-Speed Displacement Hull
Hard-Chine Planning Hull
Bentuk lambung dari tipe ini didesain dengan tujuan untuk meningkatkan besar dari positive dynamic pressure yang mengakibatkan besarnya gaya angkat terhadap lambung pada kondisi kecepatan tinggi. Sehingga konsekuensi yang didapatkan sewaktu kapal beropersai adalah semakin berkurangnya besar luasan dari permukaan basah daripada kondisi kapal pada keadaan statis.
Hard-Chine planning hull, direkomendasikan beroperasi pada kondisi SLR > 3,0. Untuk bentuk dari hard-chine planning hull dapat dilihat pada gambar berikut :
Gambar Hard-Chine Planning Hull
Tahanan Kapal
Air Resistance
Besar tahanan udara diasumsikan tanpa adanya angin diekpresikan dengan persmaan,
2
5
,
0
aC
AV
R
AA
D Dimana,a = mass density dari udara
CD= Wind tunnel test, 0,5 ~ 0,7
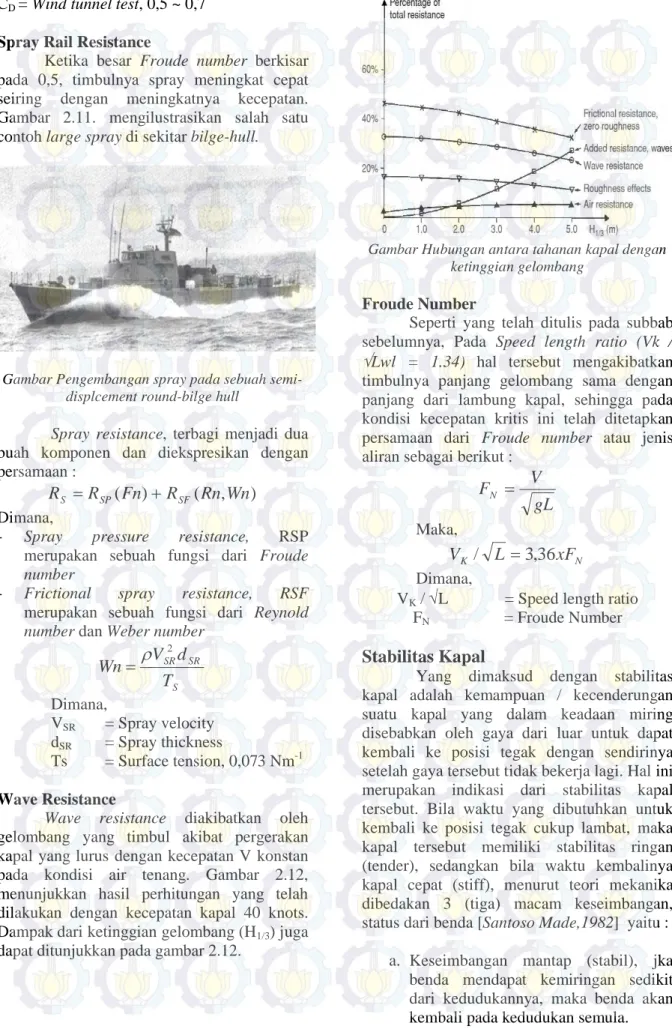
Spray Rail Resistance
Ketika besar Froude number berkisar pada 0,5, timbulnya spray meningkat cepat seiring dengan meningkatnya kecepatan. Gambar 2.11. mengilustrasikan salah satu contoh large spray di sekitar bilge-hull.
Gambar Pengembangan spray pada sebuah semi-displcement round-bilge hull
Spray resistance, terbagi menjadi dua buah komponen dan diekspresikan dengan persamaan :
)
,
(
)
(
Fn
R
Rn
Wn
R
R
S
SP
SF Dimana,- Spray pressure resistance, RSP merupakan sebuah fungsi dari Froude number
- Frictional spray resistance, RSF merupakan sebuah fungsi dari Reynold number dan Weber number
S SR SR
T
d
V
Wn
2
Dimana, VSR = Spray velocity dSR = Spray thickness Ts = Surface tension, 0,073 Nm-1 Wave ResistanceWave resistance diakibatkan oleh gelombang yang timbul akibat pergerakan kapal yang lurus dengan kecepatan V konstan pada kondisi air tenang. Gambar 2.12, menunjukkan hasil perhitungan yang telah dilakukan dengan kecepatan kapal 40 knots. Dampak dari ketinggian gelombang (H1/3) juga dapat ditunjukkan pada gambar 2.12.
Gambar Hubungan antara tahanan kapal dengan ketinggian gelombang
Froude Number
Seperti yang telah ditulis pada subbab sebelumnya, Pada Speed length ratio (Vk /
Lwl = 1.34) hal tersebut mengakibatkan timbulnya panjang gelombang sama dengan panjang dari lambung kapal, sehingga pada kondisi kecepatan kritis ini telah ditetapkan persamaan dari Froude number atau jenis aliran sebagai berikut :gL
V
F
N
Maka, N KL
xF
V
/
3
,
36
Dimana,VK/ L = Speed length ratio FN = Froude Number
Stabilitas Kapal
Yang dimaksud dengan stabilitas kapal adalah kemampuan / kecenderungan suatu kapal yang dalam keadaan miring disebabkan oleh gaya dari luar untuk dapat kembali ke posisi tegak dengan sendirinya setelah gaya tersebut tidak bekerja lagi. Hal ini merupakan indikasi dari stabilitas kapal tersebut. Bila waktu yang dibutuhkan untuk kembali ke posisi tegak cukup lambat, maka kapal tersebut memiliki stabilitas ringan (tender), sedangkan bila waktu kembalinya kapal cepat (stiff), menurut teori mekanika dibedakan 3 (tiga) macam keseimbangan, status dari benda [Santoso Made,1982] yaitu :
a. Keseimbangan mantap (stabil), jka benda mendapat kemiringan sedikit dari kedudukannya, maka benda akan kembali pada kedudukan semula.
b. Keseimbangan goyah (labil), jika benda mendapat kemiringan sedikit dari kedudukannya, maka benda akan berubah lebih banyak dari kedudukan semula.
c. Keseimbangan sembarang (Indiferent atau netral), benda akan tetap pada kedudukannya yang baru bagaimanapun kedudukannnya berubah.
Demikian juga halnya pada kapal, akan terjadi keseimbangan yang serupa. Seperti kita ketahui bahwa kapal yang terapung di air tidak selalu dalam kedudukan/posisi tegak, tetapi karena adanya pengaruh gaya dari luar misalnya: ombak dan angin maka kapal tersebut akan bergoyang, sehingga pada suatu saat kapal akan mengalami keolengan.
Mengingat kapal merupakan ala penghubung dari suatu tempat ke tempat lain melalui perairan (transportasi) yang mengangkut personil dan barang, maka faktor keselamatan dalam pelayaran sangat diutamakan. Untuk dapat menjamin keamanan dan keselamatan dalam pelayaran antara lain kapal harus mempunyai stabilitas/kesimbangan mantap (stabil), dengan kata lain kapal harus mampu melawan semua gaya-gaya dari luar yang menyebabkan kemiringan sehingga kapal dapat kembali pada posisi/kedudukan semula. Momen Dinamis
Metacentric radius dari segala macam bentuk lambung , merupakan jarak dari pusat buoyancy hingga ke atas menuju metacenter dan merupakan hasil bagi dari waterplane inertia terhadap volume kapal yang terbenam, dengan persamaan :
V
I
BM
Pada kondisi SLR = 2.0, terjadi peningkatan stiffness, yang mengindikasikan sebuah BM yang besar. Karena kondisi volume displasemen tidak selalu berkurang, faktanya terkadang muncul kenaikan yang diakibatkan kapal pada kondisi squatting, sehingga momen inersia pun juga ikut meningkat.
Gaya Akibat Pitching
Secara alami periode dari pitching sebuah planning hull seringkali bertepatan
dengan periode dari gaya yang diakibatkan oleh gelombang. Periode dari pitching tidak seperti periode dari roll, pertimbangannya hanya untuk satu arah saja, dan waktu per detik untuk periode ini dalam satu arah ialah :
g
GM
T
Dimana, T = Periode, (detik) g = kecepatan grafitasi, (m/s) Bagaimanapun, pada periode pitching bergantung pada gaya yang diakibatkan oleh gelombang. Pada prakteknya pitching merupakan fungsi dari jarak antara panjang gelombang dengan kecepatan ketika berpotongan. Besar amplitude dari pitching sering diekspresikan dengan persamaan :)
(
180
deg
radians
rees
x
Berdasarkan dari periode pitching dan amplitude, persamaan yang digunakan untuk mengestimasi virtual weight adalah :
xR
P
xDx
g
W
W
V 2 24
Dimana, WV = Virtual weight, (lb) W = Berat awal, (lb)D = Jarak W dari pusat grafitasi, (feet) P = Periode, (detik)
R = Radians
Metracentric Height
Metrancenter adalah titik perpotongan vektor gaya tekan ke atas (γ ν) pada keadaan tetap dengan vektor gaya tekan ke atas pada sudut yang kecil.
Gambar Tinggi Titik Metacenter
Saat kapal dalam keadaan miring pada suatu sudut sebesar δθ. Letak center of buoyancy berpindah dari centerline sebagai hasil dari perbedaan sudut dari berat (weight) dan buoyancy, jarak yang memisahkan antara resultan titik G dan Z disebut dengan GZ. Seperti yang terlihat pada gambar 2.13, jika
lokasi dari G dan M diketahui. Maka GZ dapat dicari dengan cara:
GZ = GM sin δθ
Pada kapal yang mengalami kemirngan dengan sudut tertentu garis vertical yang berada di center of buoyancy ayang baru kan berpotongan dengan garis center of buoyancy saat kapal dalam kondisi stabil. Dimana garis center of buoyancy berada pada center line kapal . Posisi daari titik M akan berubah-ubah tergantung dari nilai displacement dan trim kapal.
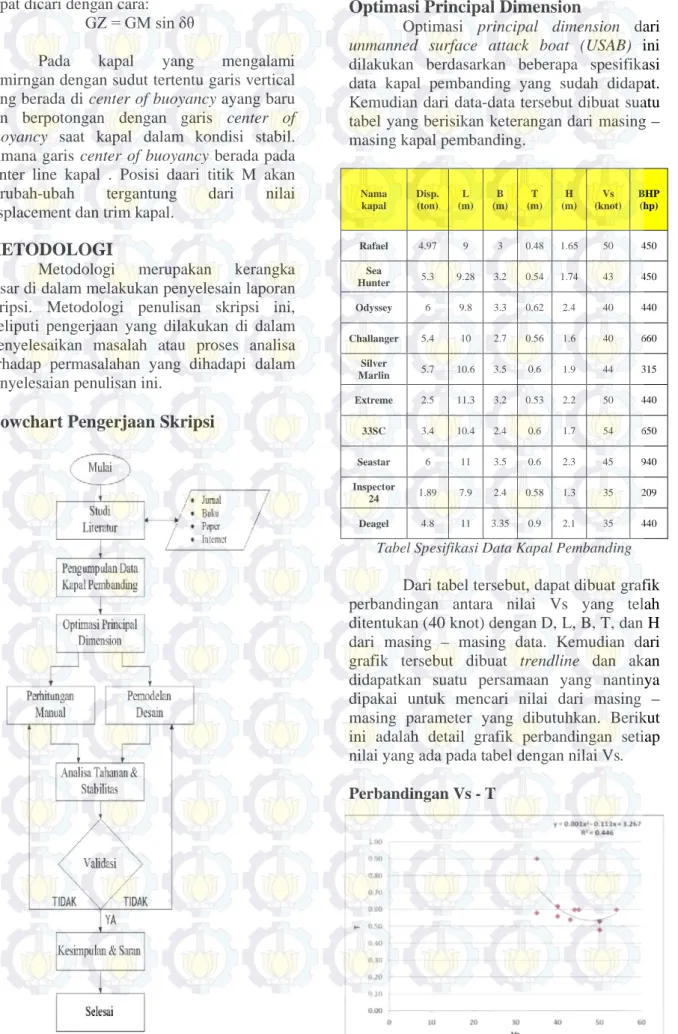
METODOLOGI
Metodologi merupakan kerangka dasar di dalam melakukan penyelesain laporan skripsi. Metodologi penulisan skripsi ini, meliputi pengerjaan yang dilakukan di dalam menyelesaikan masalah atau proses analisa terhadap permasalahan yang dihadapi dalam penyelesaian penulisan ini.
Flowchart Pengerjaan Skripsi
ANALISA DATA
Optimasi Principal Dimension
Optimasi principal dimension dari unmanned surface attack boat (USAB) ini dilakukan berdasarkan beberapa spesifikasi data kapal pembanding yang sudah didapat. Kemudian dari data-data tersebut dibuat suatu tabel yang berisikan keterangan dari masing – masing kapal pembanding.
Nama kapal Disp. (ton) L (m) B (m) T (m) H (m) Vs (knot) BHP (hp) Rafael 4.97 9 3 0.48 1.65 50 450 Sea Hunter 5.3 9.28 3.2 0.54 1.74 43 450 Odyssey 6 9.8 3.3 0.62 2.4 40 440 Challanger 5.4 10 2.7 0.56 1.6 40 660 Silver Marlin 5.7 10.6 3.5 0.6 1.9 44 315 Extreme 2.5 11.3 3.2 0.53 2.2 50 440 33SC 3.4 10.4 2.4 0.6 1.7 54 650 Seastar 6 11 3.5 0.6 2.3 45 940 Inspector 24 1.89 7.9 2.4 0.58 1.3 35 209 Deagel 4.8 11 3.35 0.9 2.1 35 440
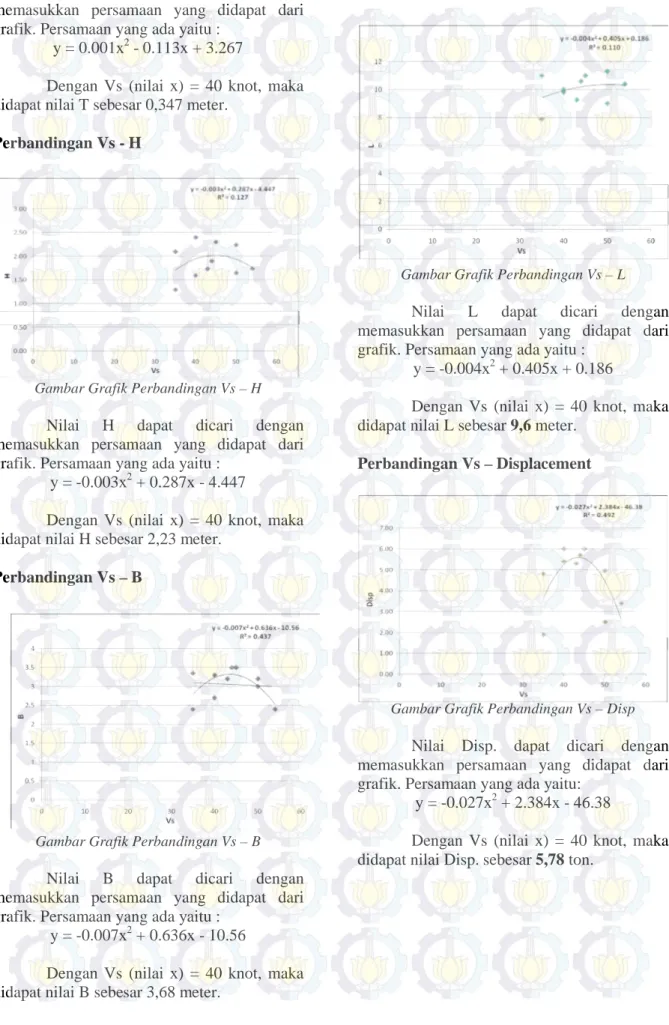
Tabel Spesifikasi Data Kapal Pembanding Dari tabel tersebut, dapat dibuat grafik perbandingan antara nilai Vs yang telah ditentukan (40 knot) dengan D, L, B, T, dan H dari masing – masing data. Kemudian dari grafik tersebut dibuat trendline dan akan didapatkan suatu persamaan yang nantinya dipakai untuk mencari nilai dari masing – masing parameter yang dibutuhkan. Berikut ini adalah detail grafik perbandingan setiap nilai yang ada pada tabel dengan nilai Vs. Perbandingan Vs - T
Nilai T dapat dicari dengan memasukkan persamaan yang didapat dari grafik. Persamaan yang ada yaitu :
y = 0.001x2- 0.113x + 3.267
Dengan Vs (nilai x) = 40 knot, maka didapat nilai T sebesar 0,347 meter.
Perbandingan Vs - H
Gambar Grafik Perbandingan Vs – H Nilai H dapat dicari dengan memasukkan persamaan yang didapat dari grafik. Persamaan yang ada yaitu :
y = -0.003x2+ 0.287x - 4.447
Dengan Vs (nilai x) = 40 knot, maka didapat nilai H sebesar 2,23 meter.
Perbandingan Vs – B
Gambar Grafik Perbandingan Vs – B Nilai B dapat dicari dengan memasukkan persamaan yang didapat dari grafik. Persamaan yang ada yaitu :
y = -0.007x2+ 0.636x - 10.56
Dengan Vs (nilai x) = 40 knot, maka didapat nilai B sebesar 3,68 meter.
Perbandingan Vs – L
Gambar Grafik Perbandingan Vs – L Nilai L dapat dicari dengan memasukkan persamaan yang didapat dari grafik. Persamaan yang ada yaitu :
y = -0.004x2+ 0.405x + 0.186
Dengan Vs (nilai x) = 40 knot, maka didapat nilai L sebesar 9,6 meter.
Perbandingan Vs – Displacement
Gambar Grafik Perbandingan Vs – Disp Nilai Disp. dapat dicari dengan memasukkan persamaan yang didapat dari grafik. Persamaan yang ada yaitu:
y = -0.027x2+ 2.384x - 46.38
Dengan Vs (nilai x) = 40 knot, maka didapat nilai Disp. sebesar 5,78 ton.
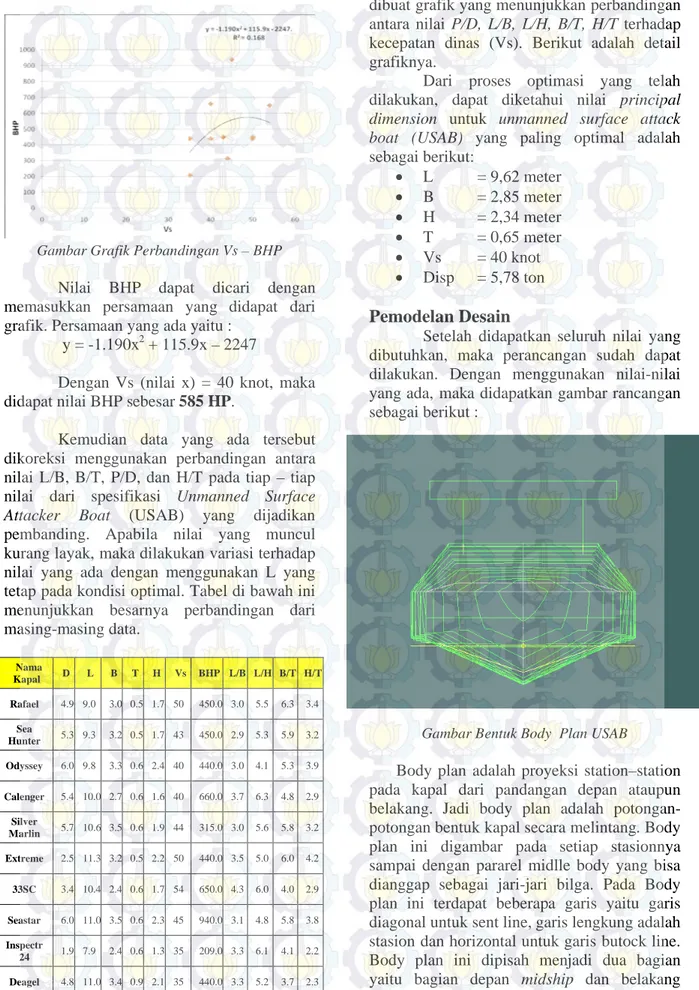
Perbandingan Vs – BHP
Gambar Grafik Perbandingan Vs – BHP Nilai BHP dapat dicari dengan memasukkan persamaan yang didapat dari grafik. Persamaan yang ada yaitu :
y = -1.190x2+ 115.9x – 2247
Dengan Vs (nilai x) = 40 knot, maka didapat nilai BHP sebesar 585 HP.
Kemudian data yang ada tersebut dikoreksi menggunakan perbandingan antara nilai L/B, B/T, P/D, dan H/T pada tiap – tiap nilai dari spesifikasi Unmanned Surface Attacker Boat (USAB) yang dijadikan pembanding. Apabila nilai yang muncul kurang layak, maka dilakukan variasi terhadap nilai yang ada dengan menggunakan L yang tetap pada kondisi optimal. Tabel di bawah ini menunjukkan besarnya perbandingan dari masing-masing data. Nama Kapal D L B T H Vs BHP L/B L/H B/T H/T Rafael 4.9 9.0 3.0 0.5 1.7 50 450.0 3.0 5.5 6.3 3.4 Sea Hunter 5.3 9.3 3.2 0.5 1.7 43 450.0 2.9 5.3 5.9 3.2 Odyssey 6.0 9.8 3.3 0.6 2.4 40 440.0 3.0 4.1 5.3 3.9 Calenger 5.4 10.0 2.7 0.6 1.6 40 660.0 3.7 6.3 4.8 2.9 Silver Marlin 5.7 10.6 3.5 0.6 1.9 44 315.0 3.0 5.6 5.8 3.2 Extreme 2.5 11.3 3.2 0.5 2.2 50 440.0 3.5 5.0 6.0 4.2 33SC 3.4 10.4 2.4 0.6 1.7 54 650.0 4.3 6.0 4.0 2.9 Seastar 6.0 11.0 3.5 0.6 2.3 45 940.0 3.1 4.8 5.8 3.8 Inspectr 24 1.9 7.9 2.4 0.6 1.3 35 209.0 3.3 6.1 4.1 2.2 Deagel 4.8 11.0 3.4 0.9 2.1 35 440.0 3.3 5.2 3.7 2.3
Tabel Perbandingan Nilai L/B, L/H, B/T, H/T
Selanjutnya dari tabel tersebut dapat dibuat grafik yang menunjukkan perbandingan antara nilai P/D, L/B, L/H, B/T, H/T terhadap kecepatan dinas (Vs). Berikut adalah detail grafiknya.
Dari proses optimasi yang telah dilakukan, dapat diketahui nilai principal dimension untuk unmanned surface attack boat (USAB) yang paling optimal adalah sebagai berikut: L = 9,62 meter B = 2,85 meter H = 2,34 meter T = 0,65 meter Vs = 40 knot Disp = 5,78 ton
Pemodelan Desain
Setelah didapatkan seluruh nilai yang dibutuhkan, maka perancangan sudah dapat dilakukan. Dengan menggunakan nilai-nilai yang ada, maka didapatkan gambar rancangan sebagai berikut :
Gambar Bentuk Body Plan USAB
Body plan adalah proyeksi station–station pada kapal dari pandangan depan ataupun belakang. Jadi body plan adalah potongan-potongan bentuk kapal secara melintang. Body plan ini digambar pada setiap stasionnya sampai dengan pararel midlle body yang bisa dianggap sebagai jari-jari bilga. Pada Body plan ini terdapat beberapa garis yaitu garis diagonal untuk sent line, garis lengkung adalah stasion dan horizontal untuk garis butock line. Body plan ini dipisah menjadi dua bagian yaitu bagian depan midship dan belakang midship.
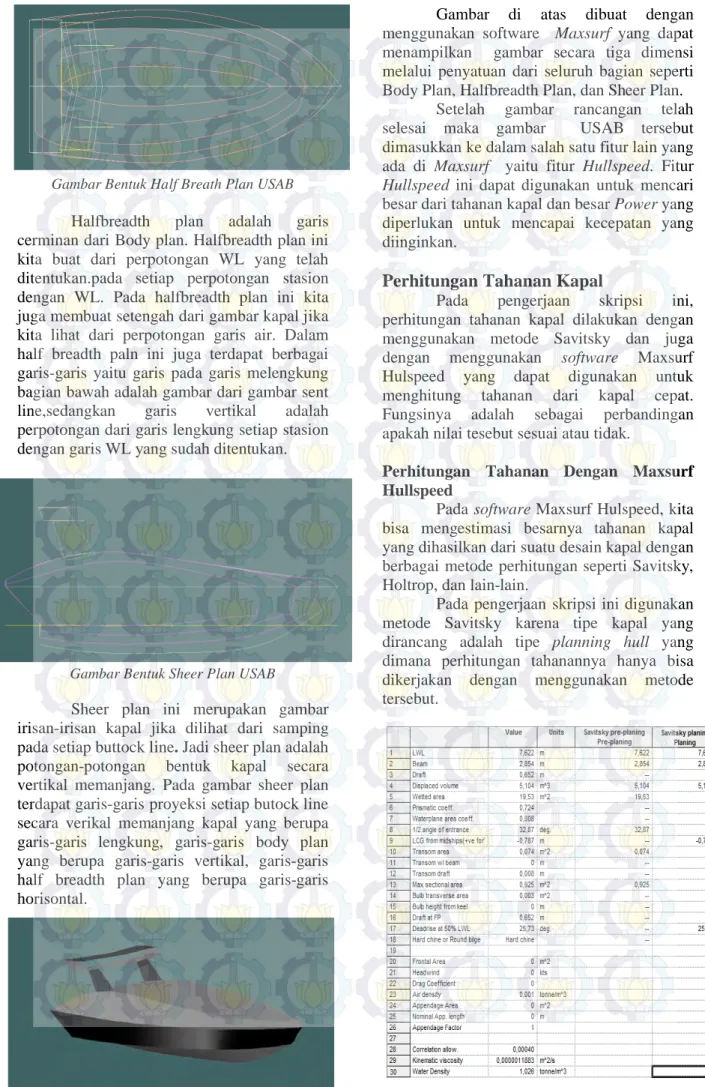
Gambar Bentuk Half Breath Plan USAB Halfbreadth plan adalah garis cerminan dari Body plan. Halfbreadth plan ini kita buat dari perpotongan WL yang telah ditentukan.pada setiap perpotongan stasion dengan WL. Pada halfbreadth plan ini kita juga membuat setengah dari gambar kapal jika kita lihat dari perpotongan garis air. Dalam half breadth paln ini juga terdapat berbagai garis-garis yaitu garis pada garis melengkung bagian bawah adalah gambar dari gambar sent line,sedangkan garis vertikal adalah perpotongan dari garis lengkung setiap stasion dengan garis WL yang sudah ditentukan.
Gambar Bentuk Sheer Plan USAB
Sheer plan ini merupakan gambar irisan-irisan kapal jika dilihat dari samping pada setiap buttock line. Jadi sheer plan adalah potongan-potongan bentuk kapal secara vertikal memanjang. Pada gambar sheer plan terdapat garis-garis proyeksi setiap butock line secara verikal memanjang kapal yang berupa garis-garis lengkung, garis-garis body plan yang berupa garis-garis vertikal, garis-garis half breadth plan yang berupa garis-garis horisontal.
Gambar di atas dibuat dengan menggunakan software Maxsurf yang dapat menampilkan gambar secara tiga dimensi melalui penyatuan dari seluruh bagian seperti Body Plan, Halfbreadth Plan, dan Sheer Plan.
Setelah gambar rancangan telah selesai maka gambar USAB tersebut dimasukkan ke dalam salah satu fitur lain yang ada di Maxsurf yaitu fitur Hullspeed. Fitur Hullspeed ini dapat digunakan untuk mencari besar dari tahanan kapal dan besar Power yang diperlukan untuk mencapai kecepatan yang diinginkan.
Perhitungan Tahanan Kapal
Pada pengerjaan skripsi ini, perhitungan tahanan kapal dilakukan dengan menggunakan metode Savitsky dan juga dengan menggunakan software Maxsurf Hulspeed yang dapat digunakan untuk menghitung tahanan dari kapal cepat. Fungsinya adalah sebagai perbandingan apakah nilai tesebut sesuai atau tidak.
Perhitungan Tahanan Dengan Maxsurf Hullspeed
Pada software Maxsurf Hulspeed, kita bisa mengestimasi besarnya tahanan kapal yang dihasilkan dari suatu desain kapal dengan berbagai metode perhitungan seperti Savitsky, Holtrop, dan lain-lain.
Pada pengerjaan skripsi ini digunakan metode Savitsky karena tipe kapal yang dirancang adalah tipe planning hull yang dimana perhitungan tahanannya hanya bisa dikerjakan dengan menggunakan metode tersebut.
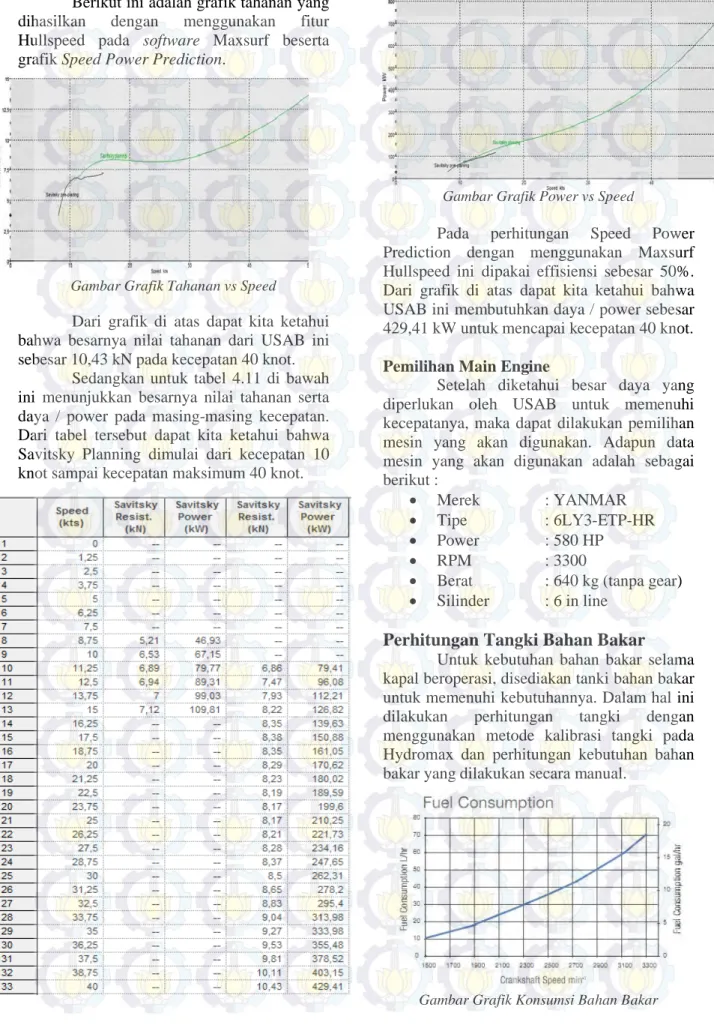
Berikut ini adalah grafik tahanan yang dihasilkan dengan menggunakan fitur Hullspeed pada software Maxsurf beserta grafik Speed Power Prediction.
Gambar Grafik Tahanan vs Speed
Dari grafik di atas dapat kita ketahui bahwa besarnya nilai tahanan dari USAB ini sebesar 10,43 kN pada kecepatan 40 knot.
Sedangkan untuk tabel 4.11 di bawah ini menunjukkan besarnya nilai tahanan serta daya / power pada masing-masing kecepatan. Dari tabel tersebut dapat kita ketahui bahwa Savitsky Planning dimulai dari kecepatan 10 knot sampai kecepatan maksimum 40 knot.
Gambar Grafik Power vs Speed
Pada perhitungan Speed Power Prediction dengan menggunakan Maxsurf Hullspeed ini dipakai effisiensi sebesar 50%. Dari grafik di atas dapat kita ketahui bahwa USAB ini membutuhkan daya / power sebesar 429,41 kW untuk mencapai kecepatan 40 knot. Pemilihan Main Engine
Setelah diketahui besar daya yang diperlukan oleh USAB untuk memenuhi kecepatanya, maka dapat dilakukan pemilihan mesin yang akan digunakan. Adapun data mesin yang akan digunakan adalah sebagai berikut :
Merek : YANMAR
Tipe : 6LY3-ETP-HR
Power : 580 HP
RPM : 3300
Berat : 640 kg (tanpa gear) Silinder : 6 in line
Perhitungan Tangki Bahan Bakar
Untuk kebutuhan bahan bakar selama kapal beroperasi, disediakan tanki bahan bakar untuk memenuhi kebutuhannya. Dalam hal ini dilakukan perhitungan tangki dengan menggunakan metode kalibrasi tangki pada Hydromax dan perhitungan kebutuhan bahan bakar yang dilakukan secara manual.
Dari grafik di atas, dapat kita ketahui konsumsi bahan bakar sebesar 70 L/hr atau 0,15 L/Hp.hr pada putaran rpm maksimum (3300). Setelah kita mengetahui besarnya SFOC, maka dapat dilakukan perhitungan dengan menggunakan rumus:
Volume Tangki Bahan Bakar (VTBB) = P x SFOC x t
Dimana,
P = Daya Mesin (Hp) t = Waktu Operasi (Jam)
Berat Bahan Bakar = VTBB x ρ Dimana,
ρ = massa jenis bahan bakar (kg/m3)
Dengan menggunakan rumus tersebut, didapatkan hasil seperti yang terlihat pada gambar 4.16 di bawah ini :
Waktu Volume Volume Berat Pelayaran Bahan Bakar Bahan Bakar Bahan bakar
(Jam) (liter) (m3) (ton) 1 72 0.07 0.05 2 144 0.14 0.11 3 216 0.22 0.16 4 288 0.29 0.22 5 360 0.36 0.27 6 432 0.43 0.32 7 504 0.50 0.38 8 576 0.58 0.43 9 648 0.65 0.49 10 720 0.72 0.54 11 792 0.79 0.59 12 864 0.86 0.65 13 936 0.94 0.70 14 1008 1.01 0.75 15 1080 1.08 0.81 16 1152 1.15 0.86 17 1224 1.22 0.92 18 1296 1.30 0.97 19 1368 1.37 1.02 20 1440 1.44 1.08 21 1512 1.51 1.13 22 1584 1.58 1.19 23 1656 1.66 1.24 24 1728 1.73 1.29
Tabel Kebutuhan Bakar Bakar
Berdasarkan tabel tersebut, dengan mengetahui volume maka kita dapat menentukan ukuran dari tangki bahan bakar
yang akan dirancang dengan software Maxsurf yang terdapat pilihan fitur tank calibration yang dapat mengetahui besarnya kapasitas dari tangki bahan bakar mulai dari kapasitas maksimum hingga minimum.
Sebelum mendapatkan hasil kalibrasi, terlebih dahulu dilakukan penentuan letak tangki tersebut. Pada desain ini, tangki bahan bakar terletak di depan main engine & dibuat menjadi 2 bagian, yakni sebelah kiri dan sebelah kanan. Hal tersebut dilakukan agar kapal memiliki stabilitas yang baik, karena kapal ini sendiri tidak memiliki awak sehingga diusahakan berat bagian depan & belakang kapal seimbang agar kapal tidak trim ataupun oleng ketika beroperasi dikarenakan stabilitas yang kurang baik.
Dari tabel di atas, dapat kita ketahui besarnya kapasitas dari dua tangki tersebut. Besar volume untuk masing-masing tangki adalah 0,649 m3untuk kapasitas 100%. Sesuai dengan perhitungan yang telah dilakukan pada tahap sebelumnya, maka desain tangki ini bisa dipakai untuk menyuplai kapal agar dapat beroperasi seperti yang direncanakan selama kurang lebih 20 jam.
Analisa Stabilitas Kapal
Setelah kita selesai menghitung dan menentukan letak dari tangki bahan bakar, maka tahap selanjutnya adalah menentukan stabilitas.
Simulasi stabilitas ini dilakukan dengan menggunakan metode yang ada pada Hydromax. Pada simulasi ini, kapal dikondisikan dalam keadaan perairan tenang.
Sebelum dilakukan simulasi, terlebih dahulu dihitung besarnya payload dari USAB ini dengan menggunakan loadcase yang berfungsi untuk meletakan titik berat pada kapal dalam Hydromax. Setelah loadcase selesai diisi maka simulasi siap dilakukan.
Dalam pembuatan loadcase tersebut, dimasukkan seluruh equipment yang ada di kapal seperti yang terlihat pada tabel di bawah ini :
Tabel Loadcase Payload USAB
Berdasarkan data yang didapatkan dari loadcase di atas, maka diperoleh hasil analisa stabilitas USAB seperti yang ditunjukkan pada grfik di bawah ini :
Hasil simulasi menunjukan bahwa stabilitas kapal dalam kondisi yang cukup baik. Hal ini dapat ditunjukan dari grafik bahwa nilai GZ maksimum sebesar 1,006 m pada sudut kemiringan 48,2º dari starboard.
KESIMPULAN DAN SARAN
Kesimpulan
Berdasarkan analisa dan pembahasan yang telah dilakukan pada bab sebelumnya, maka dapat dapat ditarik beberapa kesimpulan sebagai berikut :
1. Setelah dilakukan optimasi principal dimension dengan data dari beberapa kapal pembanding, maka ukuran yang optimal untuk Unmanned Surface Attack Boat (USAB) ini adalah sebagai berikut : LOA = 9,62 m; B = 2,85 m; T = 0,65 m; H = 2,34 m; LWL = 7,62 m.
2. Untuk mencapai kecepatan 40 knot dengan effiseinsi 50 % dibutuhkan daya / power sebesar 429,41 kW.
3. Dengan kapasitas tangki bahan bakar yang tersedia, maka USAB dapat beroperasi selama kurang lebih 20 jam.
4. Besarnya nilai tahanan kapal menggunakan perhitungan manual dengan metode Savitsky sebesar 8,33 kN. Sedangkan besarnya nilai tahanan kapal yang menggunakan Maxsurf Hullspeed sebesar 10,43 kN.
5. Setelah dilakukan analisa stabilitas dengan menggunakan Maxsurf HydroMax didapatkan besar nilai GZ maksimum sebesar 1,006 m pada sudut kemiringan 48,2º dari starboard.
Saran
1. Perlu adanya kajian lebih lanjut tentang Unmanned Surface Attack Boat dan Hard Chine Planning Hull.
2. Analisa stabilitas dapat lebih divariasikan dengan jenis ketinggian gelombang berbeda agar data yang didapat lebih spesifik.
DAFTAR PUSTAKA
1. Savistky, Daniel., On the Subject Of
High Speed Monohull ; 2003; Athens
2. Savitsky,
Daniel.,
Hydrodinamic
Design Of Planning Hull ; 1964.
3.