1
DESAIN PENGENDALIAN ROBOT MOBIL BERODA MENGGUNAKAN METODE SLIDING MODE CONTROL (SMC) Oleh: Ratnawati 1207 100 063 Dosen Pembimbing: Subchan, M.Sc, Ph.D Abstrak
Kendaraan tanpa awak dalam bentuk robot mobil banyak digunakan untuk membantu menyelesaikan pekerjaan manusia, seperti untuk kepentingan eksplorasi dan monitoring. Robot mobil adalah sistem robot yang mampu memindahkan dirinya sendiri dari posisi satu ke posisi lainnya dan kedua posisi tersebut berada pada jarak tertentu yang telah ditentukan. Sistem pergerakan pada robot mobil yaitu dengan menggunakan roda. Untuk bisa mencapai titik yang ingin dituju robot mobil harus dikendalikan. Oleh karena itu, dibutuhkan suatu metode untuk mengendalikan gerak robot mobil agar bisa mencapai titik yang ingin dituju dengan tepat dan tidak salah sasaran.
Dalam Tugas Akhir ini diterapkan metode Sliding Mode Control (SMC) untuk mendesain pengendali gerak robot mobil, karena metode ini dapat digunakan untuk menyelesaikan sistem model dinamik nonlinear dan merupakan salah satu metode pengendalian yang bersifat kokoh (robust). Dengan metode ini gerak robot mobil bisa dikendalikan untuk mencapai titik tujuan yang ditentukan.
Kata kunci : kontrol, mobile robot, Sliding Mode Control (SMC) 1. PENDAHULUAN
Perkembangan teknologi semakin maju, banyak peralatan yang diciptakan untuk membantu menyelesaikan pekerjaan manusia, salah satu diantaranya adalah robot. Pada dasarnya robot dibuat untuk membantu manusia. Robot digunakan untuk menggantikan manusia dalam mengerjakan pekerjaan yang berbahaya jika pekerjaan tersebut dikerjakan oleh manusia.
Pemanfaatan robot yang populer saat ini adalah sebagai Unmanned Vehicle/ Wahana Nir Awak (WaNA). Saat ini WaNA sudah mulai diterapkan dalam bidang militer, seperti digunakan pada misi pengintaian, pengawasan, dan penjelajahan ke tempat-tempat yang berbahaya. Jenis WaNA yang sudah digunakan adalah Pesawat Udara Nir Awak (PUNA), Kapal Selam Nir Awak (KSNA) dan Kendaraaan Darat Nir Awak (KDNA).
Robot mobil beroda (Wheeled Mobile
Robot) merupakan salah satu WaNA jenis
Kendaraan Darat Nir Awak (KDNA), robot mobil mempunyai kemampuan untuk memindahkan dirinya sendiri dari posisi satu ke posisi lainnya dan kedua posisi tersebut berada pada jarak tertentu yang telah ditentukan. Sistem pergerakan pada robot mobil beroda yaitu dengan menggunakan roda. Dalam melakukan pekerjaannya robot mobil harus bergerak menuju titik yang telah ditentukan (titik tujuan) dengan tepat sasaran. Oleh karena itu, untuk mendapatkan
performansi robot mobil yang baik dibutuhkan suatu pengendali gerak yang mengatur gerakan robot mobil.
Sistem pengendali yang banyak digunakan adalah PID (Proportional Integral
Derrivative). Namun, pengendali PID mempunyai
kelemahan, diantaranya adalah pengendali PID tidak dirancang untuk menyelesaikan sistem
nonlinear dengan banyak ketidakpastian (uncertainties). Ketidakpastian tersebut bisa berupa gangguan eksternal, ketidakpastian model, maupun ketidakpastian parameter. Ketidakpastian yang muncul pada suatu sistem bisa mempengaruhi kestabilan sistem. Oleh karena itu dibutuhkan suatu sistem pengendali yang kokoh (robust) untuk menjaga kestabilan sistem.
SMC (Sliding Mode Control) merupakan metode pengendali yang bersifat sangat robust. Beberapa contoh aplikasi metode SMC adalah untuk pengendalian ketinggian air dan temperatur uap pada steam drum boiler (Herlambang, 2010) serta digunakan untuk pengendalian tegangan alternator pada sistem pengisian baterai (Nurhadi, 2011).
Pada Tugas Akhir ini diterapkan metode
Sliding Mode Control (SMC) untuk mendesain
pengendali gerak robot mobil, karena metode ini dapat digunakan untuk menyelesaikan sistem model dinamik nonlinear dan merupakan salah satu metode pengendalian yang bersifat robust.
2 2. TINJAUAN PUSTAKA
2.1 Sejarah Mobil
Istilah robot berasal dari bahasa Czech atau bahasa Ceko, bahasa negara Cekoslowakia, yaitu
robota, yang berarti pekerja. Robot mulai dikenal
masyarakat untuk pertama kalinya ketika seorang penulis berkebangsaan Czech, Karl Capek, pada tahun 1921 membuat pertunjukan dari lakon komedi yang ditulisnya yang berjudul RUR (Rossum’s Universal Robot). Pertunjukkan ini mengisahkan sebuah mesin yang menyerupai manusia yang dapat bekerja tanpa lelah yang kemudian memberontak dan menguasai manusia. Sejak saat itu istilah robot sudah tidak asing lagi bagi masyarakat. Istilah robot pun menjadi semakin dikenal masyarakat luas ketika diperkenalkannya robot Jerman dalam sebuah film metropolis pada tahun 1926 dan semakin popular lagi dengan lahirnya robot C3PO dalam film Star
Wars pertama pada tahun 1977.
Robot didefinisikan sebagai sebuah alat mekanik yang dapat diprogram berdasarkan informasi dari lingkungan (melalui sensor) sehingga dapat melaksanakan beberapa tugas tertentu baik secara otomatis ataupun tidak, sesuai dengan program yang kita inputkan. Robot memiliki unsur unsur kokoh, stabil, tidak lelah dan presisi/teliti. Selain itu robot juga dapat bekerja dalam kondisi 4D, dangerous, dirty, dull and difficult (Kurniatun, 2011).
2.1.1 Robot Mobil
Robot mobil tipe Ackerman memiliki dinamika yang mirip dengan mobil yang dikenal secara umum, sehingga dinamakan car-like
steering. Gambar (2.1) menunjukkan robot mobil
tipe Ackerman.
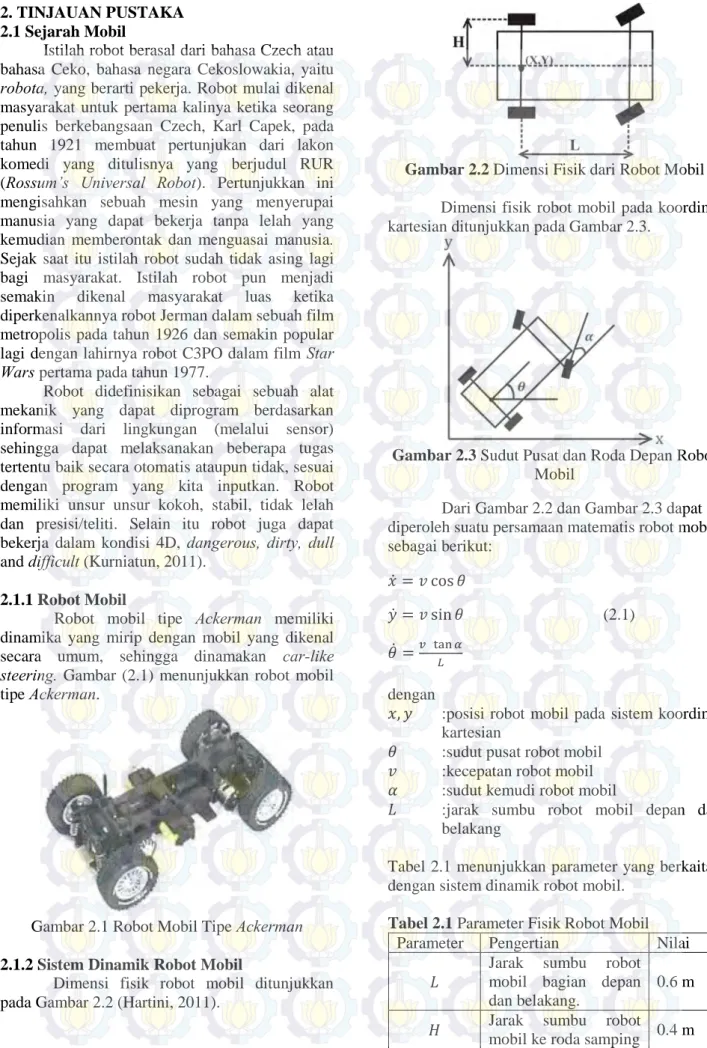
Gambar 2.1 Robot Mobil Tipe Ackerman 2.1.2 Sistem Dinamik Robot Mobil
Dimensi fisik robot mobil ditunjukkan pada Gambar 2.2 (Hartini, 2011).
Gambar 2.2 Dimensi Fisik dari Robot Mobil Dimensi fisik robot mobil pada koordinat kartesian ditunjukkan pada Gambar 2.3.
Gambar 2.3 Sudut Pusat dan Roda Depan Robot Mobil
Dari Gambar 2.2 dan Gambar 2.3 dapat diperoleh suatu persamaan matematis robot mobil sebagai berikut:
̇
̇ (2.1)
̇ dengan
:posisi robot mobil pada sistem koordinat kartesian
:sudut pusat robot mobil :kecepatan robot mobil :sudut kemudi robot mobil
:jarak sumbu robot mobil depan dan belakang
Tabel 2.1 menunjukkan parameter yang berkaitan dengan sistem dinamik robot mobil.
Tabel 2.1 Parameter Fisik Robot Mobil Parameter Pengertian Nilai
Jarak mobil bagian depan sumbu robot dan belakang.
0.6 m Jarak sumbu robot
3 2.2 Metode Sliding Mode Control (SMC)
Formulasi masalah pengendali optimal secara umum diberikan sebagai berikut (Zhu, 2003) :
( )( ) ( ( )) ( ( )) ( ) ( )
(2.2)
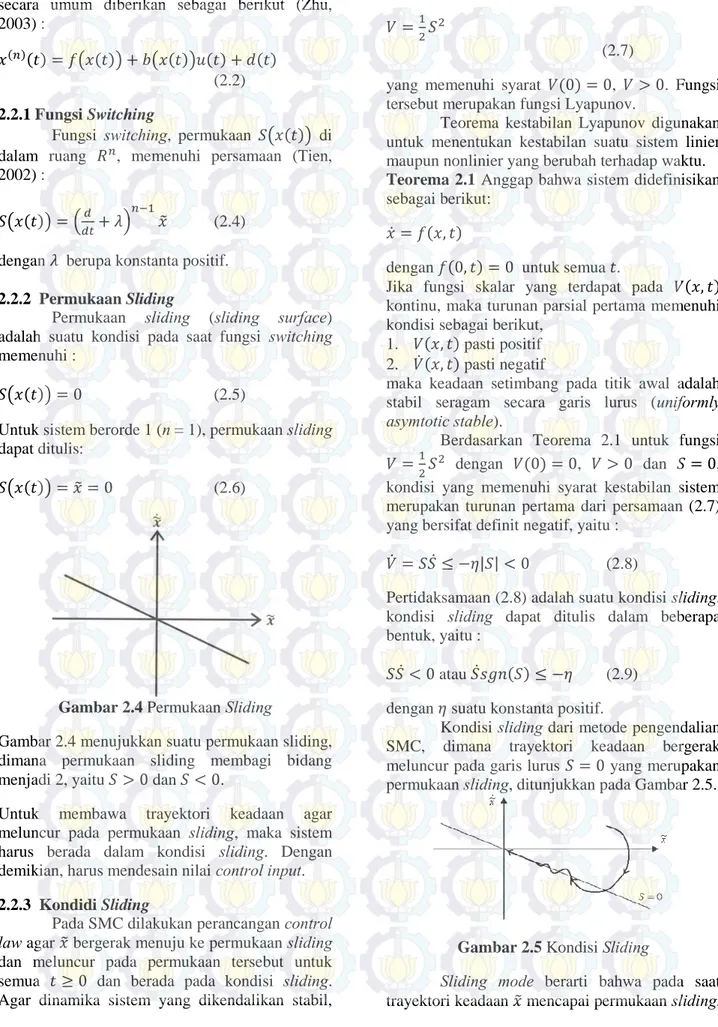
2.2.1 Fungsi Switching
Fungsi switching, permukaan ( ( )) di dalam ruang , memenuhi persamaan (Tien, 2002) :
( ( )) ( ) ̃ (2.4) dengan berupa konstanta positif. 2.2.2 Permukaan Sliding
Permukaan sliding (sliding surface) adalah suatu kondisi pada saat fungsi switching memenuhi :
( ( )) (2.5)
Untuk sistem berorde 1 (n = 1), permukaan sliding dapat ditulis:
( ( )) ̃ (2.6)
Gambar 2.4 Permukaan Sliding
Gambar 2.4 menujukkan suatu permukaan sliding, dimana permukaan sliding membagi bidang menjadi 2, yaitu dan .
Untuk membawa trayektori keadaan agar meluncur pada permukaan sliding, maka sistem harus berada dalam kondisi sliding. Dengan demikian, harus mendesain nilai control input. 2.2.3 Kondidi Sliding
Pada SMC dilakukan perancangan control
law agar ̃bergerak menuju ke permukaan sliding dan meluncur pada permukaan tersebut untuk semua dan berada pada kondisi sliding. Agar dinamika sistem yang dikendalikan stabil,
dengan kata lain untuk memperoleh control law, dimisalkan suatu fungsi definit positif, yaitu:
(2.7)
yang memenuhi syarat ( ) , . Fungsi tersebut merupakan fungsi Lyapunov.
Teorema kestabilan Lyapunov digunakan untuk menentukan kestabilan suatu sistem linier maupun nonlinier yang berubah terhadap waktu. Teorema 2.1 Anggap bahwa sistem didefinisikan sebagai berikut:
̇ ( )
dengan ( ) untuk semua .
Jika fungsi skalar yang terdapat pada ( ) kontinu, maka turunan parsial pertama memenuhi kondisi sebagai berikut,
1. ( ) pasti positif 2. ̇( ) pasti negatif
maka keadaan setimbang pada titik awal adalah stabil seragam secara garis lurus (uniformly
asymtotic stable).
Berdasarkan Teorema 2.1 untuk fungsi dengan ( ) , dan , kondisi yang memenuhi syarat kestabilan sistem merupakan turunan pertama dari persamaan (2.7) yang bersifat definit negatif, yaitu :
̇ ̇ | | (2.8)
Pertidaksamaan (2.8) adalah suatu kondisi sliding, kondisi sliding dapat ditulis dalam beberapa bentuk, yaitu :
̇ atau ̇ ( ) (2.9) dengan suatu konstanta positif.
Kondisi sliding dari metode pengendalian SMC, dimana trayektori keadaan bergerak meluncur pada garis lurus yang merupakan permukaan sliding, ditunjukkan pada Gambar 2.5.
Gambar 2.5 Kondisi Sliding
Sliding mode berarti bahwa pada saat
4 maka trayektori sistem akan bertahan pada permukaan sliding tersebut.
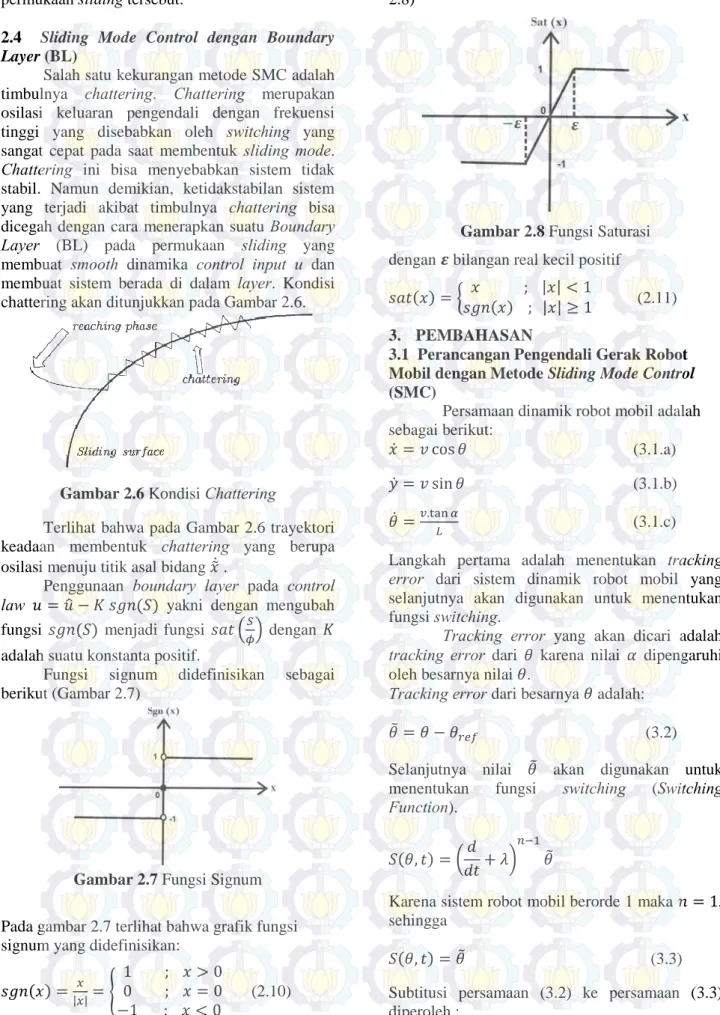
2.4 Sliding Mode Control dengan Boundary Layer (BL)
Salah satu kekurangan metode SMC adalah timbulnya chattering. Chattering merupakan osilasi keluaran pengendali dengan frekuensi tinggi yang disebabkan oleh switching yang sangat cepat pada saat membentuk sliding mode.
Chattering ini bisa menyebabkan sistem tidak
stabil. Namun demikian, ketidakstabilan sistem yang terjadi akibat timbulnya chattering bisa dicegah dengan cara menerapkan suatu Boundary
Layer (BL) pada permukaan sliding yang
membuat smooth dinamika control input u dan membuat sistem berada di dalam layer. Kondisi chattering akan ditunjukkan pada Gambar 2.6.
Gambar 2.6 Kondisi Chattering
Terlihat bahwa pada Gambar 2.6 trayektori keadaan membentuk chattering yang berupa osilasi menuju titik asal bidang ̃̇ .
Penggunaan boundary layer pada control
law ̂ ( ) yakni dengan mengubah
fungsi ( ) menjadi fungsi ( ) dengan adalah suatu konstanta positif.
Fungsi signum didefinisikan sebagai berikut (Gambar 2.7)
Gambar 2.7 Fungsi Signum
Pada gambar 2.7 terlihat bahwa grafik fungsi signum yang didefinisikan:
( ) | | {
(2.10)
sedangkan fungsi saturasi didefinisikan (Gambar 2.8)
Gambar 2.8 Fungsi Saturasi dengan bilangan real kecil positif
( ) { ( ) | | | | (2.11) 3. PEMBAHASAN
3.1 Perancangan Pengendali Gerak Robot Mobil dengan Metode Sliding Mode Control (SMC)
Persamaan dinamik robot mobil adalah sebagai berikut:
̇ (3.1.a) ̇ (3.1.b) ̇ (3.1.c) Langkah pertama adalah menentukan tracking
error dari sistem dinamik robot mobil yang
selanjutnya akan digunakan untuk menentukan fungsi switching.
Tracking error yang akan dicari adalah tracking error dari karena nilai dipengaruhi
oleh besarnya nilai .
Tracking error dari besarnya adalah:
̃ (3.2) Selanjutnya nilai ̃ akan digunakan untuk menentukan fungsi switching (Switching
Function).
( ) (
)
̃
Karena sistem robot mobil berorde 1 maka , sehingga
( ) ̃ (3.3) Subtitusi persamaan (3.2) ke persamaan (3.3) diperoleh :
5 ( ) (3.4) Penurunan persamaan (3.4) diperoleh :
̇( ) ̇ ̇ (3.5) Substitusi persamaan (3.1.c) ke persamaan (3.5)
diperoleh :
̇( ) ̇ (3.6) Selanjutnya akan dicari nilai ̂ dari persamaan
(3.6) dengan syarat ̇ dan diperoleh: ( ̇ )
sehingga diperoleh ̂ sebagai berikut:
̂ ( ̇ ) (3.7) Berdasarkan control law yang memenuhi kondisi
sliding adalah :
̂ ( ) (3.8)
Subtitusi persamaan (3.7) ke persamaan (3.8) didapat :
( ̇ ) ( ) (3.9)
Substitusi persamaan (3.9) ke persamaan (3.6) diperoleh :
̇( ) [ ( ̇ ) ( )]
̇ (3.10)
Kemudian dirancang nilai K dengan substitusikan persamaan (3.10) ke persamaan ̇ | | agar memenuhi kondisi sliding. Diperoleh nilai sebagai berikut:
| [ ( ̇ ) ( ( ̇ ))]| (3.11)
Untuk meminimalkan chattering digunakan suatu
boundary layer (BL) dengan mengubah fungsi
signum menjadi fungsi saturasi sebagai berikut :
̂ ( ) (3.12) Selanjutnya substitusi persamaan (3.7) ke
persamaan (3.12) diperoleh persamaan sebagai
output dari controller unit1 dan sekaligus
merupakan input dari plant .
( ̇ )
| [ ( ̇ ) ( ̇ )]| ( )
(3.13) 3.2 Model Dinamik Sistem Gerak Robot
Mobil pada Simulink
Setelah didapatkan rancangan pengendali gerak robot mobil dengan metode Sliding Mode
Control (SMC) selanjutnya akan dibentuk
diagram blok pada Simulink.
Dari persamaan dinamik robot mobil dibentuk model state space dengan Simulink. Berikut diagram blok sistem dinamik robot mobil (Gambar 3.1) :
Gambar 3.1 Diagram Blok Sistem Dinamik Robot Mobil
Gambar 3.1 menunjukkan plant sistem dinamik robot mobil dari persamaan (3.1). Tampak bahwa (alpha) merupakan masukan (input) bagi
sistem, sedangkan dan keluaran (output) dari sistem. menyatakan kecepatan robot mobil, sedangkan L menyatakan jarak sumbu robot mobil bagian depan dan belakang.
Selanjutnya rancangan pengendali gerak robot mobil dengan SMC juga akan dibentuk state
space nya pada Simulink. Berikut diagram blok
sistem dinamik robot mobil dengan pengendali SMC.
Gambar 3.2 Diagram Blok Sistem Dinamik Robot Mobil dengan Pengendali SMC Pada gambar 3.2 tampak bahwa diagram blok sistem dinamik robot mobil dengan pengendali SMC terdiri dari subsistem Controller SMC dan subsistem plant, yang merupakan sistem dinamik
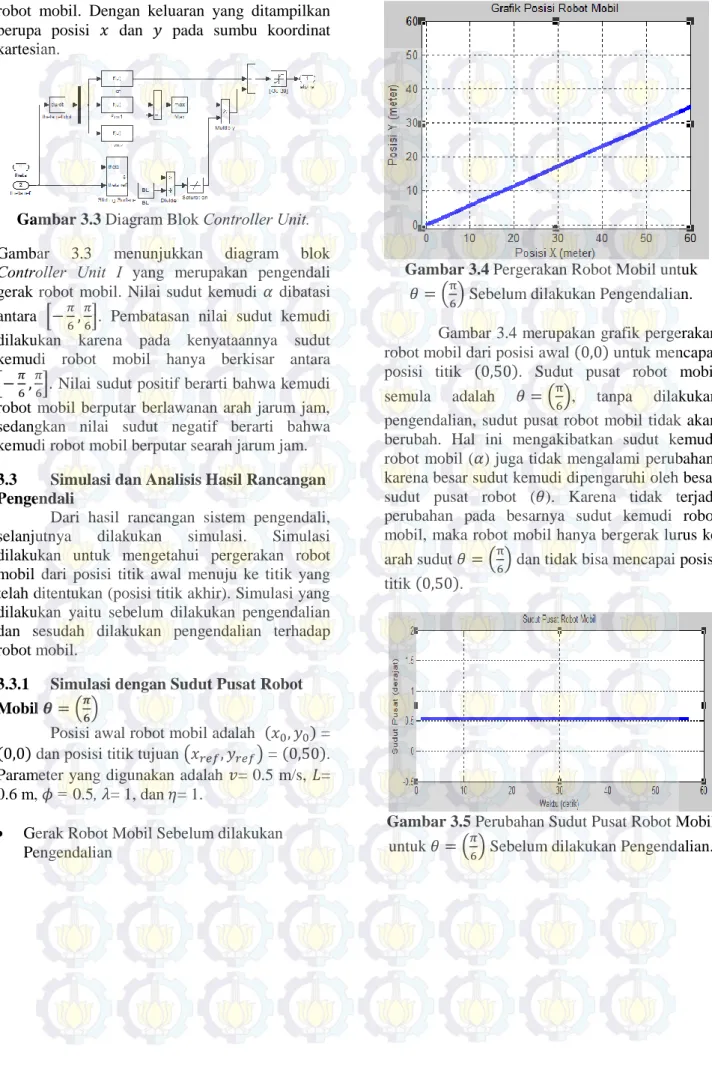
6 robot mobil. Dengan keluaran yang ditampilkan berupa posisi dan pada sumbu koordinat kartesian.
Gambar 3.3 Diagram Blok Controller Unit. Gambar 3.3 menunjukkan diagram blok
Controller Unit I yang merupakan pengendali
gerak robot mobil. Nilai sudut kemudi dibatasi antara [ ]. Pembatasan nilai sudut kemudi dilakukan karena pada kenyataannya sudut kemudi robot mobil hanya berkisar antara [ ]. Nilai sudut positif berarti bahwa kemudi robot mobil berputar berlawanan arah jarum jam, sedangkan nilai sudut negatif berarti bahwa kemudi robot mobil berputar searah jarum jam. 3.3 Simulasi dan Analisis Hasil Rancangan Pengendali
Dari hasil rancangan sistem pengendali, selanjutnya dilakukan simulasi. Simulasi dilakukan untuk mengetahui pergerakan robot mobil dari posisi titik awal menuju ke titik yang telah ditentukan (posisi titik akhir). Simulasi yang dilakukan yaitu sebelum dilakukan pengendalian dan sesudah dilakukan pengendalian terhadap robot mobil.
3.3.1 Simulasi dengan Sudut Pusat Robot Mobil ( )
Posisi awal robot mobil adalah ( ) = ( ) dan posisi titik tujuan ( ) = ( ). Parameter yang digunakan adalah = 0.5 m/s, = 0.6 m, = 0.5, = 1, dan = 1.
Gerak Robot Mobil Sebelum dilakukan Pengendalian
Gambar 3.4 Pergerakan Robot Mobil untuk ( ) Sebelum dilakukan Pengendalian.
Gambar 3.4 merupakan grafik pergerakan robot mobil dari posisi awal ( ) untuk mencapai posisi titik ( ). Sudut pusat robot mobil semula adalah ( ), tanpa dilakukan pengendalian, sudut pusat robot mobil tidak akan berubah. Hal ini mengakibatkan sudut kemudi robot mobil ( ) juga tidak mengalami perubahan, karena besar sudut kemudi dipengaruhi oleh besar sudut pusat robot ( ). Karena tidak terjadi perubahan pada besarnya sudut kemudi robot mobil, maka robot mobil hanya bergerak lurus ke arah sudut ( ) dan tidak bisa mencapai posisi titik ( ).
Gambar 3.5 Perubahan Sudut Pusat Robot Mobil untuk ( ) Sebelum dilakukan Pengendalian.
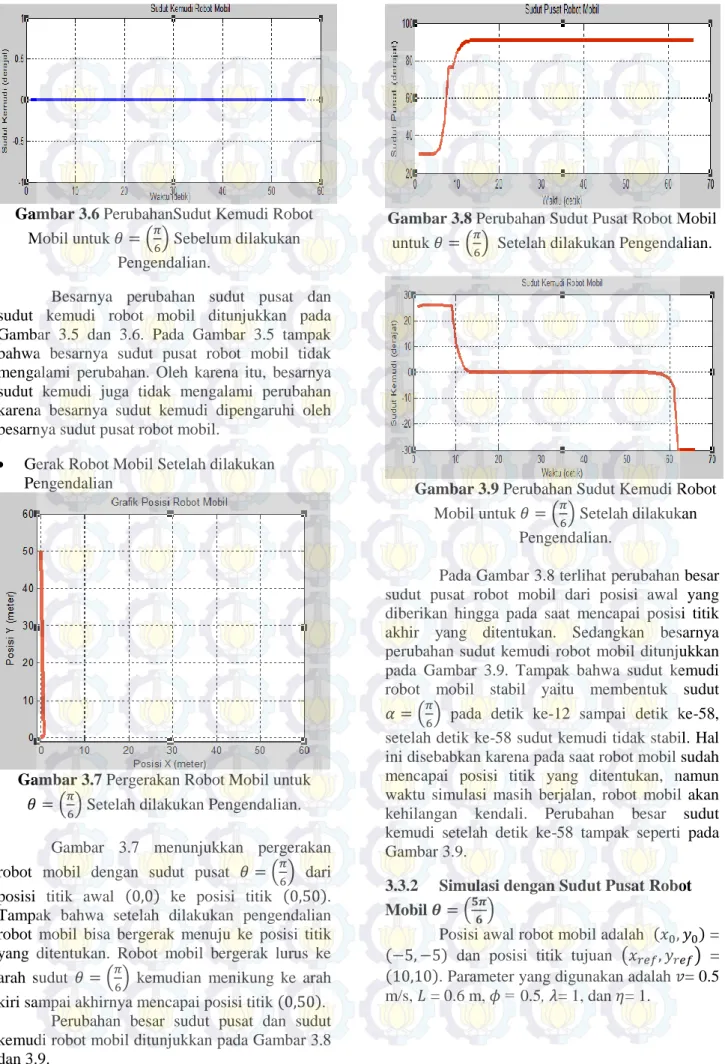
7 Gambar 3.6 PerubahanSudut Kemudi Robot
Mobil untuk ( ) Sebelum dilakukan Pengendalian.
Besarnya perubahan sudut pusat dan sudut kemudi robot mobil ditunjukkan pada Gambar 3.5 dan 3.6. Pada Gambar 3.5 tampak bahwa besarnya sudut pusat robot mobil tidak mengalami perubahan. Oleh karena itu, besarnya sudut kemudi juga tidak mengalami perubahan karena besarnya sudut kemudi dipengaruhi oleh besarnya sudut pusat robot mobil.
Gerak Robot Mobil Setelah dilakukan Pengendalian
Gambar 3.7 Pergerakan Robot Mobil untuk ( ) Setelah dilakukan Pengendalian.
Gambar 3.7 menunjukkan pergerakan robot mobil dengan sudut pusat ( ) dari posisi titik awal ( ) ke posisi titik ( ). Tampak bahwa setelah dilakukan pengendalian robot mobil bisa bergerak menuju ke posisi titik yang ditentukan. Robot mobil bergerak lurus ke arah sudut ( ) kemudian menikung ke arah kiri sampai akhirnya mencapai posisi titik ( ). Perubahan besar sudut pusat dan sudut kemudi robot mobil ditunjukkan pada Gambar 3.8 dan 3.9.
Gambar 3.8 Perubahan Sudut Pusat Robot Mobil untuk ( ) Setelah dilakukan Pengendalian.
Gambar 3.9 Perubahan Sudut Kemudi Robot Mobil untuk ( ) Setelah dilakukan
Pengendalian.
Pada Gambar 3.8 terlihat perubahan besar sudut pusat robot mobil dari posisi awal yang diberikan hingga pada saat mencapai posisi titik akhir yang ditentukan. Sedangkan besarnya perubahan sudut kemudi robot mobil ditunjukkan pada Gambar 3.9. Tampak bahwa sudut kemudi robot mobil stabil yaitu membentuk sudut ( ) pada detik ke-12 sampai detik ke-58, setelah detik ke-58 sudut kemudi tidak stabil. Hal ini disebabkan karena pada saat robot mobil sudah mencapai posisi titik yang ditentukan, namun waktu simulasi masih berjalan, robot mobil akan kehilangan kendali. Perubahan besar sudut kemudi setelah detik ke-58 tampak seperti pada Gambar 3.9.
3.3.2 Simulasi dengan Sudut Pusat Robot Mobil ( )
Posisi awal robot mobil adalah ( ) = ( ) dan posisi titik tujuan ( ) = ( ). Parameter yang digunakan adalah = 0.5 m/s, = 0.6 m, = 0.5, = 1, dan = 1.
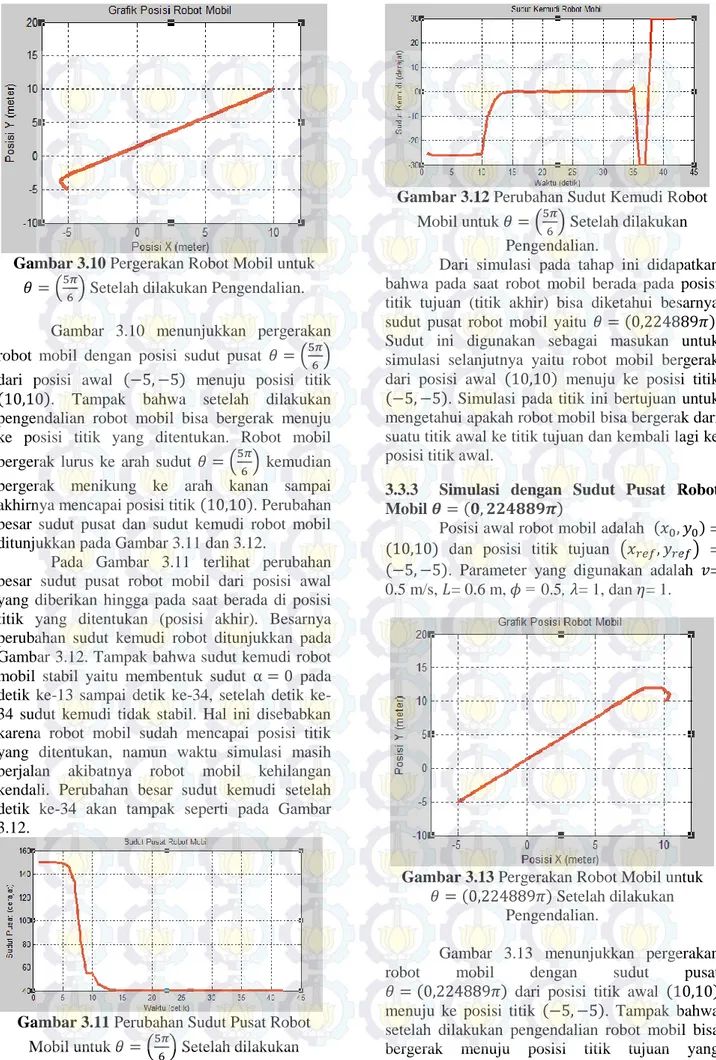
8 Gambar 3.10 Pergerakan Robot Mobil untuk
( ) Setelah dilakukan Pengendalian. Gambar 3.10 menunjukkan pergerakan robot mobil dengan posisi sudut pusat ( ) dari posisi awal ( ) menuju posisi titik ( ). Tampak bahwa setelah dilakukan pengendalian robot mobil bisa bergerak menuju ke posisi titik yang ditentukan. Robot mobil bergerak lurus ke arah sudut ( ) kemudian bergerak menikung ke arah kanan sampai akhirnya mencapai posisi titik ( ). Perubahan besar sudut pusat dan sudut kemudi robot mobil ditunjukkan pada Gambar 3.11 dan 3.12.
Pada Gambar 3.11 terlihat perubahan besar sudut pusat robot mobil dari posisi awal yang diberikan hingga pada saat berada di posisi titik yang ditentukan (posisi akhir). Besarnya perubahan sudut kemudi robot ditunjukkan pada Gambar 3.12. Tampak bahwa sudut kemudi robot mobil stabil yaitu membentuk sudut pada detik 13 sampai detik 34, setelah detik ke-34 sudut kemudi tidak stabil. Hal ini disebabkan karena robot mobil sudah mencapai posisi titik yang ditentukan, namun waktu simulasi masih berjalan akibatnya robot mobil kehilangan kendali. Perubahan besar sudut kemudi setelah detik ke-34 akan tampak seperti pada Gambar 3.12.
Gambar 3.11 Perubahan Sudut Pusat Robot Mobil untuk ( ) Setelah dilakukan
Pengendalian.
Gambar 3.12 Perubahan Sudut Kemudi Robot Mobil untuk ( ) Setelah dilakukan
Pengendalian.
Dari simulasi pada tahap ini didapatkan bahwa pada saat robot mobil berada pada posisi titik tujuan (titik akhir) bisa diketahui besarnya sudut pusat robot mobil yaitu ( ). Sudut ini digunakan sebagai masukan untuk simulasi selanjutnya yaitu robot mobil bergerak dari posisi awal ( ) menuju ke posisi titik ( ). Simulasi pada titik ini bertujuan untuk mengetahui apakah robot mobil bisa bergerak dari suatu titik awal ke titik tujuan dan kembali lagi ke posisi titik awal.
3.3.3 Simulasi dengan Sudut Pusat Robot Mobil ( )
Posisi awal robot mobil adalah ( ) = ( ) dan posisi titik tujuan ( ) = ( ). Parameter yang digunakan adalah = 0.5 m/s, = 0.6 m, = 0.5, = 1, dan = 1.
Gambar 3.13 Pergerakan Robot Mobil untuk ( ) Setelah dilakukan
Pengendalian.
Gambar 3.13 menunjukkan pergerakan robot mobil dengan sudut pusat ( ) dari posisi titik awal ( ) menuju ke posisi titik ( ). Tampak bahwa setelah dilakukan pengendalian robot mobil bisa bergerak menuju posisi titik tujuan yang ditentukan. Robot mobil bergerak lurus ke arah
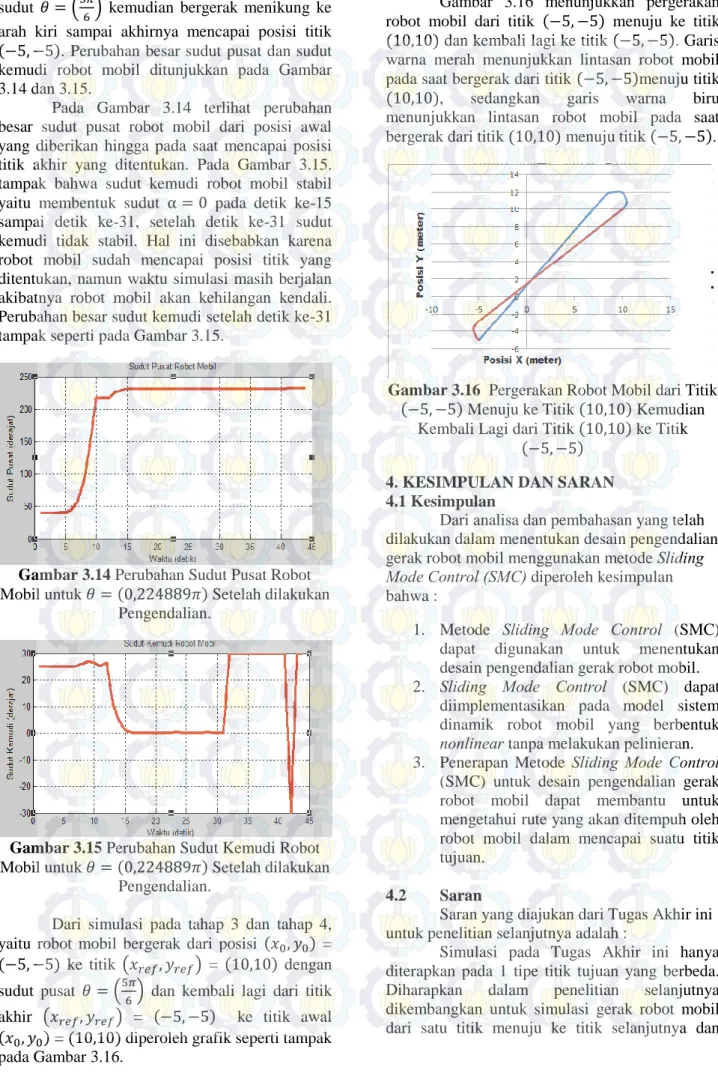
9 sudut ( ) kemudian bergerak menikung ke arah kiri sampai akhirnya mencapai posisi titik ( ). Perubahan besar sudut pusat dan sudut kemudi robot mobil ditunjukkan pada Gambar 3.14 dan 3.15.
Pada Gambar 3.14 terlihat perubahan besar sudut pusat robot mobil dari posisi awal yang diberikan hingga pada saat mencapai posisi titik akhir yang ditentukan. Pada Gambar 3.15. tampak bahwa sudut kemudi robot mobil stabil yaitu membentuk sudut pada detik ke-15 sampai detik ke-31, setelah detik ke-31 sudut kemudi tidak stabil. Hal ini disebabkan karena robot mobil sudah mencapai posisi titik yang ditentukan, namun waktu simulasi masih berjalan akibatnya robot mobil akan kehilangan kendali. Perubahan besar sudut kemudi setelah detik ke-31 tampak seperti pada Gambar 3.15.
Gambar 3.14 Perubahan Sudut Pusat Robot Mobil untuk ( ) Setelah dilakukan
Pengendalian.
Gambar 3.15 Perubahan Sudut Kemudi Robot Mobil untuk ( ) Setelah dilakukan
Pengendalian.
Dari simulasi pada tahap 3 dan tahap 4, yaitu robot mobil bergerak dari posisi ( ) = ( ) ke titik ( ) = ( ) dengan sudut pusat ( ) dan kembali lagi dari titik akhir ( ) = ( ) ke titik awal ( ) = ( ) diperoleh grafik seperti tampak pada Gambar 3.16.
Gambar 3.16 menunjukkan pergerakan robot mobil dari titik ( ) menuju ke titik ( ) dan kembali lagi ke titik ( ). Garis warna merah menunjukkan lintasan robot mobil pada saat bergerak dari titik ( )menuju titik ( ), sedangkan garis warna biru menunjukkan lintasan robot mobil pada saat bergerak dari titik ( ) menuju titik ( ).
Gambar 3.16 Pergerakan Robot Mobil dari Titik ( ) Menuju ke Titik ( ) Kemudian
Kembali Lagi dari Titik ( ) ke Titik ( )
4. KESIMPULAN DAN SARAN 4.1 Kesimpulan
Dari analisa dan pembahasan yang telah dilakukan dalam menentukan desain pengendalian gerak robot mobil menggunakan metode Sliding
Mode Control (SMC) diperoleh kesimpulan
bahwa :
1. Metode Sliding Mode Control (SMC) dapat digunakan untuk menentukan desain pengendalian gerak robot mobil. 2. Sliding Mode Control (SMC) dapat
diimplementasikan pada model sistem dinamik robot mobil yang berbentuk
nonlinear tanpa melakukan pelinieran.
3. Penerapan Metode Sliding Mode Control (SMC) untuk desain pengendalian gerak robot mobil dapat membantu untuk mengetahui rute yang akan ditempuh oleh robot mobil dalam mencapai suatu titik tujuan.
4.2 Saran
Saran yang diajukan dari Tugas Akhir ini untuk penelitian selanjutnya adalah :
Simulasi pada Tugas Akhir ini hanya diterapkan pada 1 tipe titik tujuan yang berbeda. Diharapkan dalam penelitian selanjutnya dikembangkan untuk simulasi gerak robot mobil dari satu titik menuju ke titik selanjutnya dan
10 menuju titik yang lain lagi (titik yang sambung menyambung).
DAFTAR PUSTAKA
Hartini, S. 2011. Implementasi Metode Ensamble Kalman Filter (EnKF) untuk Mengestimasi Posisi Robot Mobil. Tugas Akhir. Surabaya: Institut Teknologi Sepuluh Nopember.
Herlambang, T. 2010. Desain Pengendalian Ketinggian Air dan Temperatur Uap pada Sistem Drum Boiler dengan Metode Sliding Mode Control (SMC). Tugas Akhir. Surabaya: Institut Teknologi Sepuluh Nopember.
Kurniatun, Dwi. 2011. Mengenal Robotika Dasar. <URL:http://edukasi.kompasiana.co m/2011/02/16/mengenal-robotika- dasar-teleconference-sma- muhammadiyah-2-yogyakarta-1000guru/>
(diakses pada 19 Nopember 2011 pukul 19.00 WIB)
Nurhadi, A. 2011. Perancangan Model Pengendalian Tegangan Alternator pada Sistem Pengisian Baterai Menggunakan Metode Sliding Control (SMC). Tugas Akhir. Surabaya: Institut Teknologi Sepuluh Nopember.
Ogata, Katsuhiko. 1997. Teknik Kontrol Automatik. Jakarta: Erlangga. Pakpahan, S. 1987. Kontrol Otomatik: Teori
dan Penerapan. Jakarta: Erlangga. Prayudha, N.B. 2009. Konsep Dasar Robot.
<URL:http://www.ittelkom.ac.id/libr ary/index.php?view=article$catid=16 %3Amikroprocessorkontroller&id=5 84%3aAkonsep-dasar-robot&option=com_content$Itemid= 15>
(diakses pada 20 Februari 2011 pukul 23.00 WIB)
Tien, N. T. 2002. “Sliding Mode Control”.
Applied Nonlinear
Control.<URL:http://www.hcmut.ed u.vn/~nttien/Lectures/Applied%20no nlinear%20control/C.7&20
Sliding%20Control.pdf >
(diakses pada 20 Februari 2011 pukul 13.00 WIB)
Zhu, F.Q.Q.M., Winfield, A., dan Melhuish, C. 2003. “Fuzzy Sliding Mode Control
for Discrete Nonlinear System”.
Transactions of China Automation Sociaety, Vol. 22, No.2 (Sum No.86).