PENGEMBANGAN ALGORITMA DETEKSI TEPI CITRA BERDASARKAN KONTEN BENTUK DASAR TEPI OBJEK
(Literature Review) Febriani
Manajemen Sistem Informasi, Magister Teknologi dan Rekayasa, Universitas Gunadarma
ABSTRAK
Perkembangan teknologi perekaman citra digital dan harga peralatan yang makin terjangkau mengakibatkan kegiatan penyimpanan citra meningkat dengan tajam. Peningkatan penyimpanan citra ini menimbulkan kendala pada proses pencarian citra yang diinginkan, seperti waktu pencarian, kesesuaian citra, dan keamanan dokumen citra. Untuk mengatasi masalah tersebut, saat ini telah banyak penelitian yang mengembangkan sistem pencarian dan temu kenali citra berbasis konten bentuk, namun demikian masih terdapat keterbatasan pada sistem temu kenali tersebut. Keterbatasan yang muncul adalah bahwa deskriptor sistem hanya dapat mendefinisikan bentuk objek bila kontur yang ditelusuri tertutup, sedangkan pada kenyataannya suatu objek terbentuk dari berbagai bentuk dasar kontur atau tepi. Kondisi ini dapat dinyatakan bahwa bentuk dasar tepi tersebut bukan merupakan tepi yang tertutup. Berdasarkan pada keterbatasan tersebut di atas, penelitian ini bertujuan untuk mengembangkan algoritma deteksi tepi citra berdasarkan pada bentuk dasar tepi objek, seperti tepi vertikal, horisontal, diagonal, busur, dan sudut. Pengembangan ini diawali dengan proses pendeteksian tepi objek dengan menggunakan filter optimal. Proses selanjutnya melakukan penelusuran arah tepi dengan menggunakan kode Freeman dan penentuan bentuk dasar tepi.
Kata kunci : deteksi tepi, konten bentuk tepi, kode Freeman Abstract
The development of digital image recording technology and the more affordable price of the equipments enhance the increament of image storage activities. Increased image storage generates some constraints on the process of finding the desired image, such as search time, image similarity, and image document security. In order to resolve the issue, currently, many researches are conducted to develop image search and retrieval system based on shape content, however there are still some limitations on the system. The limitation is that the system descriptor can define object shape only if the traced contour is closed, while in reality, an object can also be formed from various basic shape of contour or edge. This condition can be expressed as a state in which the edge basic shape is not closed edge. Based on these limitations, this research aims to develop algorithm edge detection image based on the edge basic shape of the object, such as vertical edges, horizontal edges, diagonal edges, arc, and angle. The development begins with the edge detection using optimal filter. This process is followed by the search of edge direction with the help of Freeman code, and the determination of the edge basic shape.
PENDAHULUAN
Perkembangan teknologi kamera foto dan video digital yang semakin canggih dan dengan harga yang semakin murah, telah memberikan peluang kepada sejumlah besar pengguna baik untuk kebutuhan pribadi, organisasi maupun perusahaan untuk merekam dan menyimpan semua informasi atau dokumen dalam bentuk citra dan/atau video digital. Sebagai contoh adalah perekaman citra satelit, citra medis, dan yang lebih banyak lagi adalah citra hasil fotografi. Citra-citra tersebut dapat direkam setiap saat dan menjadi terus bertambah dari hari ke hari, bulan ke bulan hingga tahun ke tahun. Bertambahnya jumlah citra yang disimpan menyebabkan waktu yang dibutuhkan untuk pencarian citra juga semakin lama, sehingga hal ini menyulitkan pemiliknya untuk melakukan pencarian citra tertentu sesuai dengan yang diinginkan.
Sejumlah peneliti telah melakukan serangkaian penelitian untuk mengatasi kendala waktu pencarian yang berhubungan dengan temu kenali citra berbasis pada konten tekstual dan konten visual. Konten tekstual (berupa informasi abstrak) adalah anotasi atau catatan teks yang menceritakan informasi yang terkandung dalam setiap citra misalnya, waktu dan tempat pengambilan foto/citra, fotografer, objek apa saja yang ada dalam citra, suasana atau kejadian saat citra direkam dan lain-lain. Pencarian citra berdasarkan konten tekstual lebih sering menggunakan kata kunci atau keywords. Secara visual, konten citra yang mudah dan langsung terbaca oleh mata manusia adalah informasi dasar berupa karakteristik warna (colour), bentuk objek (shape) dan tekstur (texture). Satu dari tiga karakteristik ini atau gabungan dari karakteristik ini dapat digunakan sebagai dasar dari pencarian atau temu kenali citra.
Mata dan otak manusia mampu secara baik menganalisis dan membedakan informasi visual yang terkandung dalam citra, sehingga mata dan otak manusia dapat dengan mudah mengenali kembali citra atau menentukan kelompok citra mana saja yang memiliki kesamaan konten. Untuk mempercepat proses pencarian atau temu kenali citra dapat digunakan komputer, namun sayangnya komputer tidak dapat melakukannya, kecuali dengan bantuan algoritma yang dapat mengekstraksi dan mengenali karakteristik warna dan/atau karakteristik bentuk dan/atau karakteristik tekstur yang terkandung dalam setiap citra. Berkaitan dengan hal ini, sejak tahun 1970-an, penelitian tentang temu kenali citra (image retrieval) telah berkembang. Saat itu berkembang dua kelompok penelitian, yaitu Database Management dan Computer Vision (Rui, Huang dan Mehrota, 1997). Kedua kelompok penelitian tersebut mempelajari image retrieval dari sudut pandang yang berbeda, kelompok pertama memandang dari basis teks (text based), sedangkan kelompok kedua dari basis visual (visual based).
berbasis konten visual (Content Based Image Retrieval atau disingkat CBIR). Konten yang termasuk pada kategori karakteristik visual ini adalah warna, tekstur dan bentuk. Beberapa penelitian dan publikasi yang terkait dengan CBIR diantaranya dilakukan oleh (Gudivada dan Raghavan, 1995, (Pentland dan Picard, 1996), (Narasimhalu, 1995), (Jain, 1996), (Schatz dan Chen, 1996). Menurut Li dan Simske (Li dan Simske, 2002), shape atau bentuk tepi merupakan faktor utama diantara ketiga karakteristik tersebut di atas karena menunjukkan region atau objek citra yang relevan. Khusus untuk shape- based image retrieval, tahapan awal yang paling menentukan dalam analisis bentuk objek adalah pendeteksian tepi. Bila teknik atau algoritma pendeteksian mampu menghasilkan tepi yang sempurna dan jelas, maka analisis bentuk tepi objek dapat berhasil dengan baik. Beberapa metode yang telah digunakan dalam sistem pencarian dan temu kenali citra berbasis bentuk antara lain menggunakan Deskriptor Fourier. Ekspansi Fourier digunakan untuk menentukan sudut dan panjang busur, sedangkan koefisien Fourier digunakan untuk merepresentasikan bentuk objek, untuk selanjutnya dilakukan query. Keterbatasan dari metode ini adalah tidak dapat digunakan untuk bentuk dengan multi resolusi (Lie dan Chen, 1986). Selanjutnya (Bimbo dan Pala, 1997) mengusulkan penggunaan pencocokkan elastic (elastic matching) dalam mengenali bentuk, namun algoritma ini hanya dapat digunakan untuk rentang rotasi dan skala tertentu. Pada tahun 2003, (Bernier dan Landry, 2003) menggunakan transformasi polar di sekitar pusat geometri suatu objek, bagian tertinggi dari objek diekstraksi dan digunakan sebagai parameter pembanding untuk meminimasi perbedaan jarak dari pusat. Keterbatasan metode ini tidak didisain untuk bentuk yang tertutup.
Berdasarkan pada penelitian yang telah dikembangkan oleh peneliti sebelumnya terbukti masih terdapat berbagai kendala dalam melakukan analisis bentuk objek; antara lain tingkat akurasi pendefinisian bentuk objek, dan tingkat performansi saat dilakukan query citra masih belum memuaskan. Di lain pihak kebutuhan sistem pencarian dan temu kenali citra berbasis bentuk yang handal diperlukan untuk berbagai aplikasi.
Melihat penjelasan di atas, peneliti melakukan studi literatur untuk mengembangkan suatu algoritma pencarian dan temu kenali citra berbasis bentuk dengan menitik beratkan pada pendefinisian tepi sebagai dasar analisis bentuk objek yang akurat.
METODE
Metode yang digunakan pada penelitian ini adalah studi literatur, yaitu salah satu metode penelitian yang mengutamakan penelusuran pustaka, seperti buku-buku yang
berkaitan dengan image processing, image retrieval dan shape- based image retrieval untuk mengembangkan algoritma sistem pencarian dan temu kenali citra berbasis bentuk. Peneliti juga melakukan studi literature terhadap jurnal-jurnal penelitian yang sudah pernah ada untuk menjawab pertanyaan penelitian.
HASIL DAN PEMBAHASAN Citra Digital
Menurut kamus Webster, citra (image) merupakan representasi dari suatu objek. Dengan demikian dapat dinyatakan bahwa citra adalah wujud atau gambar objek yang berbentuk visual. Karakteristik citra yang sangat fenomenal adalah bahwa citra memiliki makna lebih dari seribu kata. Citra merupakan kumpulan titik-titik yang tersusun dalam ruang dua dimensi. Setiap titik disebut elemen terkecil citra atau picture element atau disingkat pel/piksel. Setiap piksel merupakan bagian dari pembentuk informasi visual yang terkandung dalam setiap citra. Bila dilihat dari sudut pandang matematis maka citra dapat direpresentasikan sebagai fungsi kontinu dua dimensi (2D) dari intensitas cahaya f(x,y), dimana x dan y adalah koordinat spasial dari elemen citra (piksel).
Elemen-Elemen Citra Digital
Citra digital mengandung sejumlah informasi dasar diantaranya adalah kecerahan (brightness), kontras (contrast), kontur (contour), warna (color), bentuk (shape) dan tekstur (texture) (Rinaldi, M., 2004)
Karakteristik Citra
Sebagaimana telah disampaikan bahwa karakteristik visual merupakan fitur atau konten dari sebuah citra yang memberikan informasi penting berupa warna, bentuk objek serta tekstur. Ketiga karakteristik ini merupakan hal yang sangat penting dalam analisis pengambilan keputusan.
Karakteristik Bentuk
Bentuk merupakan salah satu fitur citra tingkat rendah pada pencarian citra berbasis konten (Content Based Image Rertieval). Banyak representasi bentuk telah diajukan dan umumnya diklasifikasikan menjadi dua kategori, yaitu metode berbasis kontur (contour-based method) dan metode berbasis region (region-(contour-based method). Metode berbasis kontur menangkap fitur batas bentuk, namun mengabaikan konten bentuk yang berada di dalamnya. Metode berbasis region menangkap fitur bentuk yang ada di dalam, walaupun tidak menekankan pada fitur batas bentuk (Zhang dan Lu, 2002).
Ekstraksi Fitur Bentuk
Secara umum representasi bentuk dapat dibagi menjadi dua kategori, berbasis batas (boundary-based) dan berbasis region (region-based). Yang pertama hanya menggunakan batas luar sedangkan kedua menggunakan seluruh region bentuk. Representasi yang paling berhasil untuk kedua kategori tersebut adalah deskriptor Fourier dan moment invarian.
Tepi Citra
Definisi tepi citra secara umum adalah batas antara satu objek dengan latar belakang citra atau batas antara dua objek, sedangkan dari sisi warna dan intensitas tepi didefinisikan sebagai perubahan yang signifikan dari intensitas (atau warna) antara dua piksel yang saling berdekatan (Gonzalez, R.C. and R.E., Woods, 2002). Khusus untuk citra gray level, tepi dapat dinyatakan sebagai perbedaan intensitas yang tajam (tinggi) antara dua piksel atau sekelompok piksel yang saling bertetangga atau yang terletak pada batas antara dua region (daerah). Defenisi ini tidak berlaku sepenuhnya jika tepi tersebut mengalami efek blur. Efek ini dapat mengkibatkan batas antara dua region mengalami perubahan secara landai sehingga tepi antara kedua region tersebut menjadi kurang jelas. Definisi di atas tidak pula berlaku sepenuhnya jika pada batas antara dua region mengalami gangguan noise. Intensitas noise bersifat acak, maka keberadaanya dapat memunculkan tepi-tepi lain disekitar tepi yang sebenarnya dan juga dapat menggeser posisi tepi yang sebenarnya.
Berdasarkan pada uraian di atas maka tepi citra dapat dikategorikan sebagai berikut :
a. Tepi citra yang cerah yaitu citra yang batas antara satu region dengan region yang lain atau antara satu objek dengan objek yang lain tampak secara jelas. Dengan kata lain tepi antar region atau antar objek sangat tajam (sharp edge).
b. Tepi citra yang buram yaitu tepi antar region atau antar objek kurang jelas atau buram akibat adanya efek blur. Hal ini biasanya diakibatkan oleh pengaturan lensa kamera/alat perekam citra yang kurang tepat, atau adanya pergerakan objek yang jauh lebih cepat dari kecepatan akuisisi citra oleh kamera.
c. Tepi citra yang ber-noise yaitu batas tepi antar region atau antar objek menjadi tidak jelas akibat distorsi/gangguan oleh noise. Hal ini bisa berasal dari sumber citra (misalnya citra ultrasonografi) atau peralatan elektronik (misalnya digitizer) dan juga akibat kompresi citra.
Mengingat setiap citra digital yang terekam oleh peralatan digital dapat mengandung distorsi oleh pengaruh efek keburaman dan akibat adanya nois, maka dibutuhkan satu filter optimal yang dapat digunakan untuk mendeteksi tepi citra secara baik. Untuk kebutuhan ini, Madenda dalam papernya (Madenda, S., R. Missaoui, J. Vaillancourt, dan M. Paindavoine, 2006) telah mengembangkan sebuah filter yang dapat digunakan untuk mendeteksi tepi citra baik yang mengandung efek keburaman maupun yang bernoise.
Metode Pendeteksian Tepi
Pendeteksian tepi citra adalah salah satu metode pengolahan citra yang mempunyai domain aplikasi cukup luas yang meliputi bidang aplikasi industri, kedokteran, geologi, astronomi, perhutanan, dan militer. Setiap bidang aplikasi mempunyai karakteristik citra sendiri-sendiri, sehingga pengembangan algoritmanya pun
seringkali harus disesuaikan dengan bidang aplikasinya. Secara garis besar proses
pendeteksian tepi citra dapat diilustrasikan seperti pada Gambar 1.
Gambar 1. Bagan proses pendeteksian tepi
Tepi citra dapat ditentukan dengan menghitung perbedaan antara dua piksel yang saling berdekatan pada koordinat x serta y. Metode ini disebut turunan pertama atau gradien citra. Dengan alasan untuk mempermudah dan mempercepat proses, sebagian besar metode yang dikembangkan melakukan pendeteksian satu dimensi, atau dapat dikatakan bahwa pendeteksian dilakukan secara terpisah antara dimensi X dan dimensi Y. Pada akhir proses hasil dari dimensi X dan dimensi Y djumlahkan.
Tepi Bentuk Dasar
Pendeteksian tepi menghasilkan tepi citra yang berupa citra biner (piksel tepi berwarna putih, sedangkan piksel bukan tepi berwarna hitam). Tepi belum memberikan informasi yang berguna karena belum ada keterkaitan antara satu tepi dengan tepi lainnya. Oleh karena itu perlu dilakukan proses lebih lanjut terhadap tepi citra tersebut untuk menghasilkan informasi yang lebih berguna dan dapat digunakan untuk mendeteksi bentuk. Tepi dari sebuah bentuk yang paling dasar mencakup lima kategori meliputi garis horizontal, vertikal, diagonal dengan 45° ataupun 135°, busur serta sudut. (Nandagopalan, S., B.S. Adiga, N. Deepak, 2009).
Citra Keluar an
Kode Rantai
Pendekatan pertama untuk merepresentasikan citra menggunakan kode rantai diperkenalkan oleh Freeman pada tahun 1961 yang dikenal juga sebagai Kode Rantai Freeman (Freeman Chain Code). (Freeman, 1961). Kode rantai adalah suatu kode yang menunjukkan arah pergerakkan dari batas luar yang saling menyambung sehingga membentuk rantai. Hal ini dilakukan dengan menelusuri piksel-piksel perbatasan dari satu titik searah jarum jam hingga kembali ke titik semula.
Kode rantai digunakan untuk mengkodekan batas bentuk (contour) suatu objek sebagai suatu urutan dari ruas garis yang dihubungkan dengan panjang dan arah yang ditetapkan. [Gonzalez, R.C. and R.E. Woods, 2002]. Kode rantai menspesifikasikan arah setiap piksel tepi di dalam batas bentuk suatu objek. Arah yang digunakan adalah 4 atau 8 arah mata angin seperti yang terlihat pada Gambar 2.
(a) (b)
Gambar 2. Arah untuk kode rantai (a) 4 arah dan (b) 8 arah Sumber : (Levner, I., 2002)
Metode Deskriptor Fourier
Teknik klasik sampai saat ini telah banyak digunakan untuk menentukan batas objek adalah dengan menggunakan transformasi Fourier. Zhang et al. (Zhang et al., 2002) melakukan pengembangan teknik Deskriptor Fourier dengan nama Generic Fourier Descriptor (GFD), mengusulkan langkah pertama dari komputasi deskriptor Fourier untuk memperoleh batas koordinat (x(t), y(t)), t = 0,1,...,N-1, di mana N merupakan jumlah titik batas. Dalam implementasinya, titik-titik batas shape yang diekstrak dalam tahap preprocessing terdiri dari binerisasi, denoising, hubungan m-konektivitas dan 8-konektivitas kontur teknik tracing. Fungsi jarak centroid dinyatakan dengan jarak titik batas dari centroid (xc, yc) dari shape, seperti persamaan 1:
𝑟(𝑡) = ([𝑥(𝑡) − 𝑥𝑐]2+ [𝑦(𝑡) − 𝑦𝑐] 2) 1 2⁄ , t = 0,1, …, N-1 (1) di mana 𝑥𝑐 = 1 𝑁∑ 𝑥(𝑡), 𝑁−1 𝑡=0 𝑦𝑐 = 1 𝑁 ∑ 𝑦(𝑡) 𝑁−1 𝑡=0 (2)
Transformasi Fourier diskrit diformulasikan pada persamaan (3) 𝑎𝑛 = 1 𝑁 ∑ 𝑟(𝑡)exp ( −𝑗2𝜋𝑛𝑡 𝑁 𝑁−1 𝑡=0 ), 𝑛 = 0, 1, … , 𝑁 − 1 (3)
koefisien, an = 0, 1, ..., N-1, digunakan untuk menurunkan deskriptor Fourier dari bentuk
objek.
Selanjutnya Lionel (Lionel, P. E. E, N. Ennahnahi, M. Oumsis, M. Meknassi, 2009) menguraikan teknik deskriptor Fourier invarian. Mereka mendefinisikan suatu batas objek dengan menggunakan asumsi kurva tertutup C yang diekspresikan dalam s(t), dengan t=0, 1, …, T. Batas dari bentuk objek di antaranya dapat berupa radius, busur, dan absis yang diekstraksi dari kurva C. Jika s(t) periodik terhadap T, maka s(t) dapat diekspresikan dalam Deret Fourier seperti persamaan (4) :
𝑠(t) = ∑∞−∞𝑎𝑛exp (𝑗2π𝑛𝑡 𝑇)⁄ (4)
Dengan an adalah koefisien Fourier pada s(t), seperti persamaan (5) :
𝑎𝑛 = 1
𝑇 ∫ 𝑠(𝑡)exp (− 𝑗2𝜋𝑛𝑡 𝑇) 𝑑𝑡 ⁄
𝑇
0 𝑛 є 𝑍 (5)
Sedangkan bentuk transformasi diskrit Fourier s(t) diilustrasikan dalam persamaan (6):
𝑎𝑛 =
1
𝑁∑ s(t) exp (−j2πnt N)⁄
𝑛−1
𝑡=0 n = 0,1,…, N-1 (6)
karena s(t) merepresentasikan fungsi bentuk 1 Dimensi, maka hal ini merupakan masalah utama untuk mendapatkan deskripsi yang efektif. Koefisien Fourier biasanya dinotasikan dalam FDn, dengan n=0, 1,…., N-1 merupakan vektor ciri yang dikenal dengan nama
Deskriptor Fourier yang merepresentasikan bentuk dalam domain spektral, N
menunjukkan orde dari Deskriptor, dan an merupakan komponen frekuensi. Untuk
frekuensi rendah maka nilai orde koefisien juga rendah, sehingga informasi mengenai bentuk objek juga rendah. Begitu pula berlaku sebaliknya. Makin banyak atau tinggi orde koefisien maka makin banyak kurva yang terdefinisi dan informasi menjadi lebih detil. [Lionel et al., 2009]. Kelemahan metode ini adalah bahwa tingkat keseragaman data harus tinggi, apabila keseragaman rendah maka hasilnya menjadi buruk.
Penggabungan Metode Deskriptor Fourier dan Kode Freeman
Gopal dan Prasad (Gopal, T.V. and V.K. Prasad, 2008) menyatakan bahwa untuk mendapatkan bentuk yang akurat bergantung pada hasil representasi dari sistem pengenalan bentuk yang digunakan. Dilandasi oleh kenyataan bahwa Deskriptor Fourier memiliki keterbatasan untuk mendeteksi arah diagonal, maka pengembangan metode yang dilakukan adalah dengan menggunakan kode Freeman untuk mengidentifikasi arah
diagonalnya. Kode Freeman disimpan dalam basis data untuk menghitung tepi objek. Untuk memperoleh deskripsi bentuk objek secara baik penelitian yang telah mereka lakukan menggunakan 8-konektifitas tetangga. Persamaan untuk menghitung arah horisontal, vertikal, dan diagonal menggunakan persamaan (7):
𝑘 = 𝑄, [𝑐0(𝑥) 𝑐0(𝑦)] = [ 1 𝑇∑ [ 𝑥𝑛−1+𝑥𝑛 2 𝑁 𝑛=1 ]𝛥𝑡𝑛 1 𝑇∑ [ 𝑦𝑛−1+𝑦𝑛 2 𝑁 𝑛=1 ]𝛥𝑡𝑛 ] 𝑘 ≠ 𝑄, [𝑐𝑘(𝑥) 𝑐𝑘(𝑦)] = [ 1 𝛾𝑇[ (𝑥𝑁𝑒−𝛾𝑡𝑁 – 𝑥 0𝑒−𝛾𝑡0) + (1 𝛾 ∑ 𝛥𝑥𝑛 𝛥𝑡𝑛 𝑁 𝑛−1 [𝑒−𝛾𝑡𝑛− 𝑒−𝛾𝑡𝑛−1])] 1 𝛾𝑇[ (𝑦𝑁𝑒−𝛾𝑡𝑁− 𝑦 0𝑒−𝛾𝑡0) + (1 𝛾 ∑ 𝛥𝑦𝑛 𝛥𝑡𝑛 𝑁 𝑛−1 [𝑒−𝛾𝑡𝑛 − 𝑒−𝛾𝑡𝑛−1]) ] ] (7) di mana 𝛥𝑡𝑛 = 𝑡𝑛− 𝑡𝑛−1, 𝑡0 = 0 N = jumlah titik 0 ≤ 𝑘 ≤ 𝑁 − 1 𝛾 = 𝑗 2𝜋 𝑇 𝑘, 𝑡𝑛 = ∑ 𝛥𝑡𝑖 𝑛 𝑖=1 Δ𝑥𝑛 = 𝑥𝑛− 𝑥𝑛−1, 𝑥0 = 0 𝑥𝑛 = ∑𝑛𝑖=1𝛥𝑥𝑖, 𝑦𝑛 = ∑𝑛𝑖=1𝛥𝑦𝑖
Secara garis besar penelitian ini terdiri dari tahap sebagai berikut : 1. Tahap transformasi warna RGB ke citra dengan skala keabuan 2. Tahap pendeteksian tepi citra
3. Tahap penelusuran arah tepi
4. Tahap pembentukan kode bentuk tepi
Pada tahap satu citra berwarna ditransformasi menjadi citra dengan skala keabuan. Tahap pendeteksian dan penelusuran arah tepi menggunakan algoritma pendeteksian tepi objek oleh filter Madenda (Madenda et al., 2006) adalah sebagai berikut:
- Baca citra asli - Tampilkan citra asli
- Ubah citra berwarna menjadi citra gray level - Tampilkan citra gray level
- Tentukan nilai parameter blur (β) dan parameter noise (α) - Hitung koefisien F(x) dan H(x)
- Lakukan proses penghalusan (smoothing) - Lakukan pelacakan tepi
Penelusuran Arah dan Penentuan Bentuk Tepi
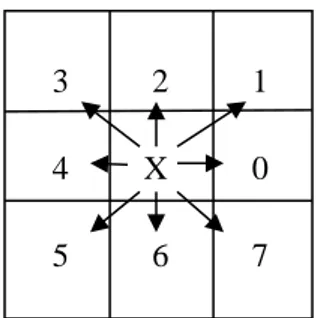
Setelah melakukan pendeteksian tepi, selanjutnya dilakukan proses penelurusan arah tepi dengan menggunakan kode Freeman (Freeman, 1961). Proses penelusuran arah ini merupakan proses yang sangat sederhana, dengan cara menelusuri piksel-piksel yang merupakan bagian dari tepi. Piksel-piksel lainnya yang tidak merupakan bagian dari tepi atau kontur dihilangkan dengan memberikan nilai nol, sehingga penelusuran arah dilakukan dengan cara verifikasi terhadap piksel tetangga. Sebuah piksel mempunyai delapan piksel tetangga yang terdiri dari masing-masing dua tetangga horizontal, vertikal dan diagonal, maka dilakukan verifikasi untuk ke delapan piksel tetangga tersebut. Kedudukan sebuah piksel terhadap delapan tetangganya diilustrasikan pada Gambar 3.
Gambar 3. Sebuah piksel dengan 8 piksel tetangga
Pada Gambar 3. piksel X merupakan piksel yang diamati, maka ke atas ditandai dengan arah 2, ke bawah arah 6, arah ke kanan ditunjukkan sebagai arah 0, ke kiri dengan arah 4, diagonal kanan atas ditandai dengan arah 1, kiri atas merupakan arah 3, diagonal kanan bawah arah 7, dan diagonal kiri bawah diberi arah 5.
Sebuah piksel dapat disebut sebagai piksel bagian dari tepi jika dan hanya jika terdapat satu dari piksel tetangganya yang memiliki nilai tinggi (tidak sama dengan nol) sehingga piksel ini kemudian ditelusuri. Sebuah piksel disebut bukan bagian dari tepi jika dan hanya jika tidak satupun dari 8 piksel tetangganya memiliki nilai tinggi, maka piksel ini dihilangkan atau diberi nilai nol.
Proses penelusuran arah tepi dilakukan dengan menggunakan kode Freeman. Proses pengkodeannya dilakukan dengan cara mencari titik koordinat awal dari objek tersebut. Pencarian titik koordinat awal dengan cara mencari piksel awal yang memiliki nilai 1. Kemudian dilakukan penelusuran mulai dari kolom pertama baris pertama, baris kedua dan seterusnya. Jika pada penelusuran pada kolom pertama tidak terdapat satupun piksel yang memiliki nilai 1, maka dilanjutkan dengan kolom kedua baris pertama, kedua dan seterusnya. Proses pencarian berakhir jika pertama kali ditemukan piksel yang memiliki nilai 1, sehingga diperoleh titik koordinat awal. Kemudian dari piksel awal ini
3 2 1
4 X 0 5 6 7
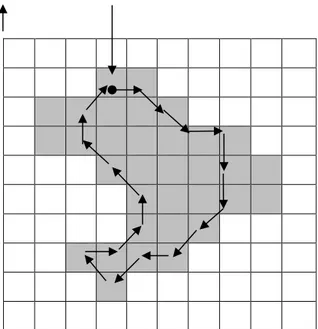
dilakukan pemeriksaan terhadap piksel berikutnya atau piksel tetangga. Arah pemeriksaan piksel yang digunakan berdasarkan arah jarum jam. Posisi piksel yang berikutnya menjadi acuan kode arah. Pengkodean ini dilakukan hingga piksel terakhir dengan menggunakan kode 0, 1, 2, 3, 4, 5, 6 dan 7. Gambar 4. merepresentasikan contoh objek dan kode rantai yang dihasilkan.
MULAI 10 9 8 7 6 5 4 3 2 1 1 2 3 4 5 6 7 8 9 10
Gambar 4. Objek dengan kode rantai 077 066 554 530 123 321
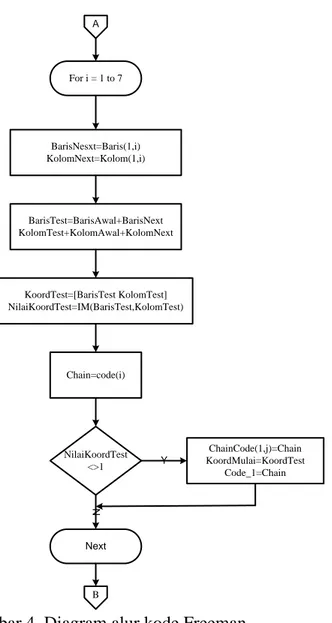
Gambar 3. menunjukkan arah tepi yang ditelusuri, sedangkan kode rantai yang digunakan untuk proses ini adalah menggunakan 8 arah mata angin. Gambar 4. menjelaskan diagram alur dari algoritma yang digunakan untuk mencari kode Freeman (Freeman, H., 1961).
Citra 1 Piksel (IM) Chain=[],Mulai=[], BrsTest=[], Code_1=0, ChainCode=[], KoordTest-[], KoordMulai=[], KoordAwal=[]
[Baris, kolom]=find(citra 1 piksel) KoordAwal=[Baris(1),Kolom(1)] KoordMulai=KoordAwal KoordRek=KoordAwal Code_1=’0' Baris=[-1 -1 0 1 1 1 0] Kolom=[0 1 1 1 0 -1 -1] Code=[2 1 0 7 6 5 4] Code_1=’1' Code_1=’2' Code_1=’3' Code_1=’4' Code_1=’5' Code_1=’6' Baris=[-1 -1 -1 0 1 1 1] Kolom=[-1 0 1 1 1 0 -1] Code=[3 2 1 0 7 6 5] Baris=[0 -1 -1 -1 0 1 1] Kolom=[-1 -1 0 1 1 1 0] Code=[4 3 2 1 0 7 6] Baris=[1 0 -1 -1 -1 0 1] Kolom=[-1 -1 -1 0 1 1 1] Code=[5 4 3 2 1 0 7] Baris=[1 1 0 -1 -1 -1 0] Kolom=[0 -1 -1 -1 0 1 1] Code=[6 5 4 3 2 1 0] Baris=[1 1 1 0 -1 -1 -1] Kolom=[1 0 -1 -1 -1 0 1] Code=[7 6 5 4 3 2 1] Baris=[0 1 1 1 0 -1 -1] Kolom=[1 1 0 -1 -1 -1 0] Code=[0 7 6 5 4 3 2] Baris=[-1 0 1 1 1 0 -1] Kolom=[1 1 1 0 -1 -1 -1] Code=[1 0 7 6 5 4 3] BarisAwal=KoordMulai (1,1) KolomAwal=KoordMulai (1,2) N A B N N N N N Y Y Y Y Y Y Y N
For i = 1 to 7 BarisNesxt=Baris(1,i) KolomNext=Kolom(1,i) BarisTest=BarisAwal+BarisNext KolomTest+KolomAwal+KolomNext KoordTest=[BarisTest KolomTest] NilaiKoordTest=IM(BarisTest,KolomTest) Chain=code(i) NilaiKoordTest <>1 Next ChainCode(1,j)=Chain KoordMulai=KoordTest Code_1=Chain B N Y
Gambar 4. Diagram alur kode Freeman
Setiap penelusuran tepi, danjutkan dengan pemeriksaan arah dan bentuk tepi apakah berupa garis vertical, horizontal, diagonal, bersudut atau membentuk busur. Penentuan jenis bentuk dasar tepi citra mengikuti penghitungan berikut.
1. Tepi dengan garis vertikal, horizontal dan diagonal
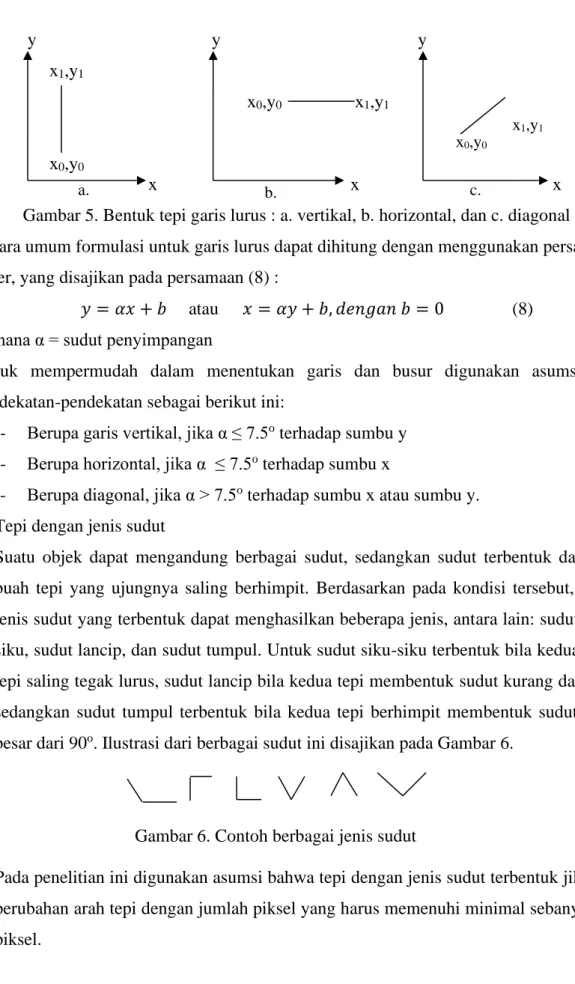
Suatu objek dapat terdiri dari garis lurus yang berupa garis vertikal, horizontal ataupun diagonal seperti yang diilustrasikan pada Gambar 5.
x0,y0 x1,y1
x0,y0
x x x Gambar 5. Bentuk tepi garis lurus : a. vertikal, b. horizontal, dan c. diagonal Secara umum formulasi untuk garis lurus dapat dihitung dengan menggunakan persamaan linier, yang disajikan pada persamaan (8) :
𝑦 = 𝛼𝑥 + 𝑏 atau 𝑥 = 𝛼𝑦 + 𝑏, 𝑑𝑒𝑛𝑔𝑎𝑛 𝑏 = 0 (8)
di mana α = sudut penyimpangan
Untuk mempermudah dalam menentukan garis dan busur digunakan asumsi dan pendekatan-pendekatan sebagai berikut ini:
- Berupa garis vertikal, jika α ≤ 7.5o terhadap sumbu y
- Berupa horizontal, jika α ≤ 7.5o terhadap sumbu x
- Berupa diagonal, jika α > 7.5o terhadap sumbu x atau sumbu y. 2. Tepi dengan jenis sudut
Suatu objek dapat mengandung berbagai sudut, sedangkan sudut terbentuk dari dua buah tepi yang ujungnya saling berhimpit. Berdasarkan pada kondisi tersebut, maka jenis sudut yang terbentuk dapat menghasilkan beberapa jenis, antara lain: sudut siku-siku, sudut lancip, dan sudut tumpul. Untuk sudut siku-siku terbentuk bila kedua buah
tepi saling tegak lurus, sudut lancip bila kedua tepi membentuk sudut kurang dari 90o,
sedangkan sudut tumpul terbentuk bila kedua tepi berhimpit membentuk sudut lebih besar dari 90o. Ilustrasi dari berbagai sudut ini disajikan pada Gambar 6.
Gambar 6. Contoh berbagai jenis sudut
Pada penelitian ini digunakan asumsi bahwa tepi dengan jenis sudut terbentuk jika ada perubahan arah tepi dengan jumlah piksel yang harus memenuhi minimal sebanyak 15 piksel. x0,y0 x1,y1 a. b. c.
direpresentasikan pada Gambar 7.
x1,y1 x2,y2
x0,y0
Gambar 7. Bentuk tepi jenis busur
Untuk menentukan besar busur yang terbentuk, pada penelitian ini menggunakan metode turunan pertama, seperti pada persamaan (9) :
α 1 = atan 𝛥𝑦1
𝛥𝑥1 di mana 𝛥𝑥1 = |𝑥0− 𝑥1| , 𝛥𝑦1 = |𝑦0− 𝑦1|
α 2 = atan 𝛥𝑦2
𝛥𝑥2 di mana 𝛥𝑥2 = |𝑥1− 𝑥2| , 𝛥𝑦2 = |𝑦1− 𝑦2| (9)
Jika 𝛼1 = 𝛼2 atau 𝛼2 − 𝛼1 = 0 akan membentuk garis lurus.
Jika |α2− α 1| > 5o maka diasumsikan membentuk sebuah busur.
PENUTUP Simpulan
Berdasarkan analisis terhadap sejumlah literatur yang terkait dengan pengembangan algoritma pendeteksian tepi yang digunakan untuk mengkodekan bentuk, maka dikembangkan algoritma deteksi tepi citra untuk mengekstraksi bentuk dasar tepi citra yang berhasil megenali bentuk dasar tepi vertikal, horisontal, diagonal, sudut, dan busur. Algoritma ini merupakan gabungan dari proses filter optimal yang dapat mendeteksi tepi citra meskipun citra dalam kondisi bernoise dan mengandung blur, dilanjutkan dengan proses penelusuran tepi dengan menggunakan kode Freeman dan proses penentuan bentuk dasar tepi.
Daftar Pustaka
Bernier, T. and J. A Landry, 2003, “A new method for representing and matching shapes of natural objects”,
Freeman, H., 1961, “On the encoding of arbitary geometric configurations”, IRE Transactions, 10:260-268.
Gonzalez, R.C. and R.E., Woods, 2002, Digital Image Processing, Pearson Education, Inc.
Gopal, T.V. and Prasad, V.K., 2008, “A Novel Approach to Shape Based Image Retrieval Integrating Adapted Fourier Descriptors and Freeman Code”, IJCSNS International Journal of Computer
Science and Network Security, VOL.8 No.6, June 2008.
Jain, R., 1996. “ Infoscopes: Multimedia Information System”. In B. Furht, editor, Multimedia Systems and Techniques”, pages 217–253. Kluwer.
Lionel, P. E. E, N. Ennahnahi, M. Oumsis and M. Meknassi, 2009, “Application of affine invariant Fourier descriptor to shapebased image retrieval”, IJCSNS International Journal of Computer Science and
Network Security, VOL.9 No.7, July 2009.
Lie, W.N. and Y.C., Chen, 1986, “Shape Representation and Matching using Polar Signature”, Proceedings
of International Computer Symposium, 710-718, Tainan, Taiwan.
Li, D. and S. Simske, 2002, Shape Retrieval with Flat Contour Segments, Intelligent Enterprise Technologies Laboratory, HP Laboratories Palo Ato.
Madenda, S., R. Missaoui, J. Vaillancourt and M. Paindavoine, 2006, An Optimal Edge Detector for
Automatic Shape Extraction, SITIS.
Rinaldi M., 2004, Pengolahan Citra Digital dengan Pendekatan Algoritmik, Informatika Bandung.
Nandagopalan, S., B.S. Adiga and N. Deepak, 2009, A Universal Model for Content-Based Image Retrieval, International Journal of Computer Science 4:4.
Narasimhalu, A.D., 1995. “Special Section on Content Based Retrieval”, Multimedia Systems.
Pentland, A., and R. W. Picard, 1996. “Special Issue on Digital Libraries”, IEEE Trans Patt Recog. and
Mach. Intell.
Rui, Y., T.S., Huang, and Mehrota, 1997, “Content Based Image Retrieval with relevance feedback in MARS”, Proceedings, International Conference , vol. 2, pp. 815-818, 1997.
Schatz, Bruce; Chen, and Hsinchun, 1996. “Building Large Scale Digital Libraries. Computer”.
Zhang, D. and G. Lu, 2002, “An Integrated Approach to Shape Based Image Retrieval”, ACCV2002: The 5th
Asian Conference on Computer Vision, 23-25 January 2002, Melbourne, Australia.
______________, 2002, “A Comparative Study of Three Region Shape Descriptors”, Proceedings of the