SKRIPSI
Oleh :
MOCHAMMAD ALI MASHURI
0734010248
J URUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
J AWA TIMUR
SKRIPSI
Diajukan Untuk Memenuhi Sebagian Per syar atan Dalam Memperoleh Gelar Sar jana Komputer
J ur usan Teknik Infor matika
Oleh :
MOCHAMAD ALI MASHURI
0734010248
J URUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
J AWA TIMUR
SISTEM SIRKULASI UDARA OTOMATIS MENGGUNAKAN MIKROKONTROLLER 8535 PADA BATERRY ROOM FARM
Disusun Oleh:
MOCHAMMAD ALI MASHURI 0734010248
Telah disetujui mengikuti Ujian Negar a Lisan Gelombang VI Tahun Akademik 2011/2012
Menyetujui
Pembimbing 1 Pembimbing 2
Basuki Rahmat, S.Si, MT Ir . Kar tini, MT NIP/NPT. 3 6907 06 0209 1 NIP. 19611110 199103 2 001
Mengatahui,
Dekan Fakultas Teknologi Industr i
Univer sitas Pembangunan Nasional ” Veter an ” J awa Timur
Dosen Pembimbing 1 : Basuki r ahmat, S.Si, MT Dosen Pembimbing 2 : Ir . Kar tini, MT
ABSTRAK
Sistem pengaturan sirkulasi pada sebuah peternakan hewan unggas masih belum efisien
karena masih bergantung pada sistem manusia yang mana petugas akan selalu mengawasi agar
sirkulasi udara tetap normal. Pada sistem sirkulasi udara otomatis ini diharapkan dapat
meringankan dan memberikan kenyamanan sehingga petugas hewan ternak pun lebih ringan
dalam mengontrol sirkulasi udara pada hewan ternak khususnya unggas.
Tugas akhir ini merupakan sebuah salah satu contoh sistem kendali modern yang mana
system ini mengatur agar udara yang ada didalam ruangan udara tetap bersih dengan suhu 28°C.
Melalui sistem sirkulasi udara otomatis ini proses dikendalikan menggunakan microkontroller
ATMEGA 8535 yang terhubung oleh sensor suhu LM35 udara dengan media out put kipas Fan
dan LCD sebagai informasi keadaaan suhu ruangan kandang.
Hasil dari tugas akhir ini yaitu mendeteksi udara yang kotor dengan tahapan pengeluaran
udara yang kotor diharapkan dapat menjaga udara tetap bersih degan bantuan sensor suhu LM35
yang diletakkan pada ruangan peternak hewan unggas
ii
Alhamdulillah, Penulis bersyukur kepada Allah SWT atas semua Rahmat,
Taufik, dan Hidayah-Nya yang telah diberikan kepada penulis sehingga dapat
menyelesaikan Skripsi ini dengan baik.
Dalam menyelesaikan Skripsi ini, penulis berpegang pada teori serta
bimbingan dari para dosen pembimbing Skripsi. Dan berbagai pihak yang banyak
membantu hingga terselesaikannya Skripsi ini. Skripsi merupakan salah satu syarat
bagi mahasiswa untuk menyelesaikan program studi Sarjana Strata Satu (S-1) di
Jurusan Teknik Informatika Fakultas Teknologi Industri Universitas Pembangunan
Nasional “Veteran” Jawa Timur.
Terwujudnya Skripsi ini adalah berkat usaha, kerja keras serta dukungan dari
berbagai pihak. Dan tanpa menghilangkan rasa hormat, penulis mengucapkan banyak
terima kasih kepada pihak-pihak yang telah membantu penulis antara lain:
1.
Prof. Dr. Ir. Teguh Soedarto, MP Selaku Rektor UPN “Veteran” Jawa Timur.
2.
Ir. Sutiyono, MT Selaku Dekan Fakultas Teknologi Industri UPN “Veteran”
Jawa Timur.
iii
banyak waktu untuk memberikan arahan, ilmu.
5.
Ir Kartini MT Selaku dosen pembimbing II yang dengan sabar telah meluangkan
banyak waktu, pikiran dan tenaga di antara kesibukan beban-beban kegiatan
akademik untuk memberikan bimbingan dan kesempatan penyusun untuk
berkreasi dalam proses pembuatan Skripsi ini.
6.
Bapak dan Ibu dosen Teknik Informatika yang telah memberikan ilmunya kepada
penulis selama kuliah.
7.
Ayahanda tercinta, yang merupakan lelaki terhebat yang pernah aku temui dan
ibunda tersayang yang juga merupakan perempuan yang kesabarannya tiada
bandingnya didunia ini. Kedua adek aku yang sangat menyayangi aku, terima
kasih atas semuanya, aku tidak akan bisa seperti ini tanpa keluargaku.
8.
Rekan rekan Guru MI dan SMP Raden Rahmat yang selalu memberikan motivasi
dan dukungan.
9.
Siswa – Siswi SMP Raden Rahmat dan Osis SMP Raden Rahmat yang selalu
memberikan semangat.
iv
M. Cosin dan M.daus yang sudah rela bagi ilmunnya dan terimakasih atas semua
dukungan selama ini dan terimakasih atas pertemanannya.
Penulis menyadari bahwa penulisan ini masih jauh dari kesempurnaan,
karena tiada gading yang tak retak. Oleh sebab itu, penulis mengharapkan kritik dan
saran yang bersifat membangun guna terciptanya kesempurnaan penulisan ini
selanjutnya. Semoga penulisan ini dapat menambah wawasan serta ilmu pengetahuan
bagi siapa saja yang membacanya.
Surabaya, 21 januari 2012
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... v
DAFTAR GAMBAR ... viii
DAFTAR TABEL ...x
BAB I PENDAHULUAN ... 1
1.1.Latar Belakang ... 1
1.2.Perumusan Masalah ... 2
1.3.Batasan Masalah ... 2
1.4.Tujuan ... 3
1.5.Manfaat ... 3
1.6.Metodologi Penelitian ... 4
1.7.Sistematika Penulisan ... 5
BAB II LANDASAN TEORI ... 7
2.1.Definisi Sistem Udara Otomatis ... 7
2.2.Hardware ... 8
2.2.1. Microcontroller ... 8
2.2.2 Macam/jenis mikrokontroller ... 9
2.2.3 ATMega8535………..10
2.2.4 Memori mikrokontroller ATMega8535………..15
2.3 Memori Data……….15
2.3.1 Memori Program………16
2.6
Kipas………...19 2.7 Bahasa
C……….20
2.7.1. Proses Kompilasi Dari Linking Program C………... 21
2.7.2 Struktur Penulisan Program C……… 23
2.7.3 Pengenalan Fungsi-Fungsi Dasar………... 24
2.7.4 Pengenalan Praprosesor #Include………... 27
2.7.5 LCD (Liquid Crystal Display) ………... 28
2.7.6 Bahasa C Pada Mikrokontroller ATMega 8535………. 29
2.8 Software Pemrogaman Dan Software Downloader……….. 30
2.8.1 CodeVision AVR………...……… 31
2.9 Ternak
Itik……….34
2.9.1 Kandang Ternak Itik……….. 35
2.9.2 Kebutuhan makan ternak itik……… 37
2.9.3 Baterry Room Farm Pada Itik……….... 38
3.2 Perancangan Sistem Hardware………... 43
3.2.1. Rangkaian Keseluruhan Sistem………44
3.2.2. Rangkaian Minimum Sistem ATMega 8535……….. 45
3.2.3. Rangkaian Real Time Clock………... 46
3.2.4 Rangkaian LCD………... 47
3.2.5 Rangkaian Catu Daya………... 48
3.3 Perancangan Software………...………. 49
3.4 Flowchart
microcontroler………....53
BAB IV IMPLEM ENTASI
4.1.Implementasi Rangkaian Perangkat Lunak………...56
4.1.1. Pembuatan File Project Pada Code Vision AVR…...56
4.1.2. Instalasi USB AVR
Downloader………61
4.2. Implementasi Rangkaian Perangkat Keras……….64
4.2.1. Pengujian Rangkaian Minimum Sistem ATMega
8535………...64
(Liquid Crystal Display)...66
4.2.4. Implementasi Rangkaian Catu Daya………...67 4.3 Implementasi Sistem
Microkontroller……….69
4.3.1 Out put Mendeteksi suhu pada LCD………..71 4.3.2 Pengendalian kipas berdasarkan
suhu……….72
BAB V UJ I COBA
5.1 Lingkungan Uji
Coba………..73
5.2. Pelaksanaan uji
coba………74
5.2.1 Pelaksanaan uji coba
standarisasi.………...74
5.2.2 Pelaksanaan uji coba tingkat keberhasilan………...77
BAB VI PENUTUP
6.1
Kesimpulan………..80 6.2
Gambar2.2
Diagram blok
ATmega8535
………...11
Gambar 2.3 Minimum sistem ATmega8535………..12 Gambar 2.4 Susunan kaki dari
ATmega8535………..12 Gambar 2.5 Rangkaian sensor suhu
LM35……….17 Gambar 2.6 Sensor suhu
LM35………...………18 Gambar 2.7
Kipas………...……….18 Gambar 2.8 Proses Kompilasi-Linking Dari Program C
………21 Gambar 2.9 LCD (Liquid Crystal
Display)……….28 Gambar 2.9 Alur Pemrogaman Code Vision AVR……….33 Gambar 2.10 Gambar Kandang Itik
Tradisional………..35 Gambar 2.11 Skema Baterry Room
Farm………....37 Gambar 3.1 Diagram Blok Sistem sirkulasi udara otomatis………39
Gambar 3.2 Desain Sistem sirkulasi udara otomatis………...42
Gambar 3.3 Gambar Skematik Minimum Sistem ATMega 8535………...43
Gambar 3.4 Skematik
Gambar 3.6 Rangkaian Catu Daya Penurun Tegangan………46
Gambar 3.7 Gambar Flowchart Sistem Sirkulasi Udara Otomatis………...49
Gambar 3.8 Gambar Flowchart microkontroler ………...50
Gambar 4.1 Tampilan Menu Pada Code Vision AVR………...52
Gambar 4.2 Menu Wizard Pada Code Vision AVR………....52 Gambar 4.3 Inisialisasi Pada Menu Wizard ………...53 Gambar 4.4 Hasil Compile Pada Program
………...54 Gambar 4.5 Proses Download Program Ke Dalam Mikrokontroller………..55
Gambar 4.6 Pesan Error Dalam Proses Download Program………...55
Gambar 4.7 Kode IC Yang Dapat Di Kenali Oleh Perangkat Downloader……....57
Gambar 4.8 Menu Tools Pada Code Vision AVR………...58
Gambar 4.9 Menu Browse Pada Tools Code Vision AVR ………58
Gambar 4.10 Gambar Rangkaian Push Button ………...60
Gambar 4.11 Gambar Hasil Dari Pengujian Rangkain Lcd………....63
Gambar 4.14 Rangkaian Catu
DAFTAR TABEL
Gambar 2.11 Tabel kebutuhan pakan
itik………36 Tabel 4.1 Hasil Pengukuran Catu
Tabel 5.2 Perbandingan suhu sensor LM35 dengan thermometer……….68
Tabel 5.3 Uji coba tingkat
keberhasilan………...71
1
BAB I PENDAHULUAN
1.1 Latar Belakang
Berkembanganya populasi peternakan itik di indonesia sampai saat ini boleh dikatakan paling besar dikawasan seasia tenggara. Populasi besar ini ternyata sampai sekarang baru mendapatkan manfaat yang memadai bagi peternakannya, akan tetapi terdapat permasalahan mendasar mengenai pengembangbiakan yang dipengarahui faktor lingkungan, dalam hal ini udara.
Penangan yang dilakukan sampai sekarang masih mengunakan sistem manual. Yaitu dengan menggunakan fentilasi udara secara sederhana yang berfungsi untuk mengatur suhu ruangan. Ventilasi udara ini masih membutuhkan peran manusia dalam membuka dan menutup ventilasi.
Melihat kemungkinan dan kenyataannya yang ada maka diciptakan suatu sistem yang dapat mengatur sirkulasi udara secara otomatis yang disesuaikan dengan kebutuhan lingkungan peternakan unggas, sehingga peran manusia dikurangi untuk menghindari kesalahan dan kelalaian akibat menurunnya kinerja manusia karena lelah.
pada perancangan perangkat lunak meliputi perancangan pada pembuatan diagram alir dan bahasa C.
1.2 Rumusan Masalah
Berdasarkan permasalahan diatas, maka dapat diambil rumusan masalah sebagai berikut :
1. Bagaimana membuat atau merangkai sebuah sistem agar dapat mengatur sirkulasi udara pada ternak unggas.
2. Bagaimana merancang dan membuat suatu sistem agar udara didalam kandang tetap bersih dan tidak bau.
1.3 Batasan Masalah
Batasan - batasan masalah yang diberikan sesuai dengan permasalahan yang telah diterangkan diatas, antara lain:
1. Sistem ini menggunakan mikrokontroller 8535.
2. Sistem ini menggunakan blower sehingga udara didalam tetap terjaga. 3. Pemakaian kandang ternak yaitu menggunakan sistem baterry room farm 4. Pada saat start sistem ini akan mendeteksi udara didalam kandang secara
otomatis.
5. Sistem ini akan mengontrol keadaan udara didalam kandang secara otomatis. 6. Sistem ini akan terus berjalan sampai masa panen ternak unggas tesebut yaitu
1.4 Tujuan
Tujuan yang ingin dicapai dalam Tugas Akhir ini adalah :
1. Merancang sistem yang mampu memberikan sirkulasi udara secara otomatis. 2. Menggunakan dan mempelajari mikrokontroller 8535.
3. Untuk mengetahui permasalahan yang ada pada hewan ternak unggas khususnya pada sistem sirkulasi udara.
1.5 Manfaat
Adapun manfaat yang dapat diambil dari pembuatan sistem sirkulasi udara otomatis menggunakan mikrokontroller 8535 ini adalah:
1. Digunakan untuk memberikan sirkulasi udara secara otomatis sehingga kesehatan unggas tetap terjaga
2. Meningkatkan kualitas produktivitas panen kususnya pada kesehatan hewan ternak unggas.
3. Membantu meringankan petugas peternakan dalma mengontrol suhu udara.
1.6 Metode Penelitian
1. Studi Literatur pengendalian motor DC serta penggunaaan mikrokontroller ATMEGA 8535.
2. Merancang serta menguji sistem minimal Mikrokontroller ATMEGA 8535 sebagai pengendalian secara keseluruhan.
3. Merancang prangkat lunak yang berfungsi untuk membantu mengatur sirkulasi udara secara otomatis.
4. Menguji sistem secara keseluruhan serta mengambil data dari hasil perancangan.
5. Menganalisa hasil dan membuat kesimpulan.
1.7 Sistematika Penulisan
Adapun sistematika penulisan yang digunakan dalam tugas Akhir ini adalah sebagai berikut :
BAB I : PENDAHULUAN
Bab ini menjelaskan tentang latar blakang, ruang lingkup batasan masalah, tujuan, manfaat dan sistematika penulisan.
BAB II : LANDASAN TEORI
Pada bab ini menjelaskan tentang teori – teori serta penjelasan yang dibutuhkan pada Sirkulasi Udara Otomatis.
BAB III : ANALISA DAN PERANCANGAN SISTEM
BAB IV : IMPLEMENTASI SISTEM
Pada bab ini menjelaskan implementasi dari program yang telah dibuat meliputi lingkungan implementasi, implementasi proses dan implementasi antar muka.
BAB V : UJICOBA DAN EVALUASI PROGRAM
Pada bab ini berisi tentang pengujian program tugas akhir.
BAB VI : PENUTUP
Berisi kesimpulan dan saran dari penulis. DAFTAR PUSTAKA
Berisi t ent ang lit erat ur sebagai t eori pendukung pembahasan pada
6
2.1 Definisi Sistem Udar a Otomatis
Kemajuan teknologi yang sangat pesat menuntut suatu sistem kerja yang praktis dan efisien. Otomatisasi merupakan salah satu alternative yang sangat tepat untuk diterapkan, sehingga diperoleh suatu efisiensi waktu dan tenaga kerja.
Dalam suatu usaha peternakan hewan unggas, pemeliharaan kesehatan merupakan bagian penting dalam meningkatkan produksi ternak. Produkvitas dan reproduktivitas ternak hanya dapat dicapai secara optimal apabila hewan ternak dalam keadaan sehat. Oleh karena itu pada sistem udara otomatis ini membantu agar udara tetap bersih dan menjadikan hewan unggas tidak mudah sakit. Dengan adanya sestem ini dapat meringankan beban petugas dalam mengontrol suhu udara yang ada pada ruangan hewan unggas. Karena selama ini sistem yang digunakan masih menggunakan manualisasi yang mana petugas sering megecek setiap beberapa jam agar udara tetap bersih.
2.2 Har dwar e
Perangakat keras, merupakan salah satu element dari sistem computer, suatu alat yang bisa dirabah oleh manusia secara langsung yang mendukung proses komputerisasi.
Peralatan ini pada umumnya cukup canggih karena dapat bekerja berdasarkan perintah yang ada padanya yang disebut instruction set. Dengan adanya perintah yang dimengerti oleh mesin tersebut, maka perintah tersebut melakukan berbaga aktifitas berdasarkan susunan perintah yang didapatkan olehnya.
2.2.1 Mikr okontroller
Mikrokontroller adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroller sebenarnya membaca dan menulis data.
Mikrokontroller merupakan komputer didalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut “pengendali kecil” dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroller ini. Dengan penggunaan mikrokontroller ini maka :
• Sistem elektronik akan menjadi lebih ringkas
• Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem adalah perangkat lunak yang mudah dimodifikasi
kecepatan tinggi atau sekedar menambah jumlah saluran masukan dan keluaran (I/O). Dengan kata lain, mikrokontroller adalah versi mini atau mikro dari sebuah komputer karena mikrokontroller sudah mengandung beberapa periferal yang langsung bisa dimanfaatkan, misalnya port paralel, port serial, komparator, konversi digital ke analog (DAC), konversi analog ke digital dan sebagainya hanya menggunakan sistem minimum yang tidak rumit atau kompleks.
2.2.2 Macam/jenis mikr okontroller
Secara teknis hanya ada 2 yaitu RISC dan CISC dan masing-masing mempunyai keturunan/keluarga sendiri-sendiri.
• RISC kependekan dari Reduced Instruction Set Computer : instruksi
terbatas tapi memiliki fasilitas yang lebih banyak
• CISC kependekan dari Complex Instruction Set Computer : instruksi bisa
dikatakan lebih lengkap tapi dengan fasilitas secukupnya.
Tentang jenisnya banyak sekali ada keluarga Motorola dengan seri 68xx, keluarga MCS51 yang diproduksi Atmel, Philip, Dallas, keluarga PIC dari Microchip, Renesas, Zilog. Masing-masing keluarga juga masih terbagi lagi dalam beberapa tipe. Jadi sulit sekali untuk menghitung jumlah mikrokontroller Berikut ini gambar Mikrokontroller Atmega8535.
2.3.2 ATMega8535
ATMega8535 merupakan salah satu mikrokontroller keluarga ATMEL dari perkembangan terakhir, yaitu generasi AVR (Alf and Vegard’s Risc Processor). Mikrokontroller AVR memilikia RISC (Reduced Instruction Set
Computing) 8 bit, dimana semua instruksi dikemas dalam kode 16-bit (16-bit
Word) dan sebagian besar instruksi di eksekusi dalam 1 (satu) siklus clock, serta mempunyai kecepatan maksimal 16MHZ. Selain itu, ATMega8535 mempunyai 6 pilihan mode sleep untuk menghemat daya listrik.
• Fitur-fitur yang diberikan oleh mikrokontroller ATMega8535 adalah
sebagai berikut:
1) Saluran I/O sebanyak 32 buah, yaitu Port A sampai Port D. 2) ADC (Analog to Digital Converter) 10 bit sebanyak 8 chanel.
3) Tiga buah Timer/Counter dengan kemampuan pembandingan, yaitu 2 buah timer/counter 8 bit, dan 1 buah timer/counter 16 bit.
4) CPU yang memiliki 32 buah register
5) 131 Instruksi yang hanya membutuhkan 1 siklus clock 6) Watchdog Timer dengan osilator internal
7) Tegangan operasi 2,7 V – 5,5 V 8) Internal SRAM sebesar 512 byte
9) Memori Flash sebesar 8 KB dengan kemampuan Read While Write. 10) Unit interupsi internal dan eksternal
11) Port antarmuka SPI (Serial Pheripheral Interface).
13) Internal downloader USB AVR (In-sistem Programming dilengkapi LED programming indicator)
14)Tidak membutuhkan power tambahan saat melakukan download program 15)EEPROM (Electrically Erasble Programmable Read Only Memory).
sebesar 512 byte yang dapat diprogram saat operasi. 16)Antarmuka komparator analog.
17) Port USART untuk komunikasi serial.
• Beberapa karakteristik ADC Internal Yang terdapat pada mikrokontroller
ATMega8535 adalah:
a. Mudah dalam pengoperasian. b. Resolusi 10 bit.
Berikut merupakan gambar diagram blok ATmega8535
Berikut sekema minimum sistem ATmega 8535
Gambar 2.3 minimum sistem ATmega 8535
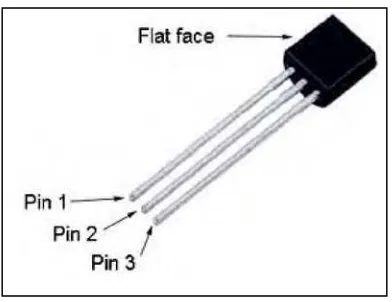
Konfigurasi pin ATmega8535, pada Gambar 2.3 berikut ini merupakan susunan kaki standar 40 pin Mikrokontroller AVR ATmega 8535.
Gambar 2.4 susunan kaki dari ATmega8535
1) VCC merupakan pin masukan positif catu daya. Setiap piranti elektronika digital membutuhkan sumber daya yang umumnya sebesar 5V. Oleh karena itu, biasanya di PCB kit mikrokontroller selalu ada IC regulator 7805
2) GND sebagai pin ground
3) Port A (PA0..PA7) merupakan pin I/O dua arah dan dapat diprogram sebagai pin masukan ADC
4) Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter, komparator analog, dan SPI
5) Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog dan Timer Osilator.
6) Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu komparator analaog, interupsi eksternal, dan komunikasi serial. 7) Reset merupakan pin yang digunakan untuk me-reset mikrokontroller. 8) XTAL1 dan XTAL2 sebagai pin masukan clock eksternal. Suatu
mikrokontroller membutuhkan sumber detak (clock) agar dapat mengeksekusi instruksi yang ada di memeori. Semakin tinggi nilai kristalnya, semakin cepat mikrokontroller tersebut.
9) AVCC sebagai pin masukan tegangan untuk ADC. 10)AREF sebagai pin masukan tegangan referensi.
2.2.3 Memor i mikr okontr oller ATMega8535
untuk instruksi yang akan dijalankan oleh mikrokontroller. Memori jenis ini biasanya bertipe ROM (Read Only Memory), yang digunakan untuk menyimpan program. Sedangkan memori data digunakan sebagai tempat penyimpanan data-data yang sedang diakses oleh mikrokontroller.
2.3 Memor i Data
Memori data terbagi menjadi 3 bagian, yaitu 32 buah register umum, 64 buah register I/O, dan 512 byte SRAM Internal. Register keperluan umum menempati space data pada lamat terbawah, yaitu $00 sampai $1f. Sementara itu, register khusus untuk menangani I/O dan control terhadap mikrokontroller menempati 64 alamat berikutnya, yaitu mulai dari $20 sampai $5f. Register tersebut merupakan register khusus yang dipergunakan untuk mengatur fungsi terhadap berbagai peripheral mikrokontroller, seperti control register, timer/counter, fungsi-fungsi I/O, dan sebagainya. Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F. Selain itu, AVR ATMega8535 juga memiliki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai dengan $1FF.
2.3.1 Memor i Pr ogr am
Memori program yang terletak dalam flash PEROM (Programmable Erasble Read Only Memory) tersusun dalam word atau 2
PEROM adalah PROM yang dapat ditulis ulang beberapa kali, dan dapat dihapus secara elektrik atau dengan tegangan listrik. AVR ATMega8535 memiliki 4Kbyte X 16-bit Flash PEROM dengan alamat mulai dari $000 sampai dengan $FFF. AVR tersebut memiliki 12-bit Program Counter (PC) sehingga mampu mengalamati isi Flash
2.4 Status Register (SREG)
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu intruksi dieksekusi SREG merupakan bagian dari inti CPU mikrokontroller.
1)Bit 7-1: Global Interrupt Enable.
Bit harus diset untuk meng-enable interupsi. Hal ini dilakukan dengan cara mengaktifkan interupsi yang akan digunakan, melalui meng-enable bit control register yang bersangkutan secar individu. Bit akan di-clear apabila terjadi suatu interupsi yang dipicu oleh hardware, dan bit tidak akan mengizinkan terjadinya interupsi, serta akan diset kembali oleh RET1.
2)Bit 6-T: Bit Copy Storage.
3) Bit 5-h: Half carry flag. 4) Bit 4-s: Sign Bit.
Bit S merupakan hasil operasi EOR antara flag-N (negative) dan Flag V (complement dua overflow).
5) Bit 3-V: Two’s Complement Overflow Flag. Bit berguna untuk mendukung operasi aritmatika.
6) Bit 2-N: Negative Flag.
Apabila suatu operasi menghasilkanbilangan negative, maka flag-N akan diset.
7) Bit 1-Z: Zero Flag.
Bit akan diset bila hasil operasi yang diperoleh adalah nol. 8) Bit 0-C: Carry Flag.
Apabila suatu operasi menghasilkan carry, maka bit akan diset.
2.5 Sensor Suhu LM35
Op-Amp CA3140. Rangkaian driver sensor suhu lm35 ini sangat sederhana seperti dapat dilihat pada gambar berikut.
Rangkaian Driver Sensor Suhu LM35
Gambar 2.5 rangkaian sensor suhu LM35
faktor penguatan dari driver sensor suhu LM35 diatas dapat diatur dengan mengubah nilai tahanan potensiometer 10K yang berfungsi sebagai feedback pada penguatan nol inverting tersebut. Agar tidak mengubah nilai konversi suhu ke tegangan dari sensor suhu LM35. Rangkaian sensor suhu LM35 diatas bekerja dengan tegangan 5Vdc sama dengan tegangan sumber untuk sensor suhu LM35
2.6 Kipas
Kipas yang digunakan pada sistem ini ada 2 buah. Yang pertama berfungsi berfungsi mengalirkan udara dingin ke dalam tabung dan kipas yang kedua berfungsi sebagai membuang udara panas dalam tabung. Penggunaan kedua kipas ini berada pada waktu yang berbeda dimana saat pemanasan berlangsung, kipas atas akan menyala untuk membantu proses pemanasan agar berlangsung lebih cepat, dan bila air telah dirasa panas atau melebihi temperatur yang dikehendaki, kipas samping akan menyala untuk membantu proses pendinginan. Tanda bahwa sedang terjadi proses pemanasan atau pendinginan dapat dilihat dari tampilan yang terdapat pada LCD. Pada LCD akan ditampilkan berapa suhu saat pemanasan berlangsung serta nilai PWM nya
Gambar 2.7 Kipas
2.7 Bahasa C
Akar dari bahasa C adalah bahasa BCPL yang dikembangkan oleh Martin
Richards pada tahun 1967. Bahasa ini memberikan ide kepada Ken Thompson yang
kemudian mengembangkan bahasa yang disebut dengan B pada tahun 1970.
Perkembangan selanjutnya dari bahasa B adalah bahasa C oleh Dennis Ritchie
sekitar tahun 1970-an di Bell Telephone Laboratories Inc. (sekarang adalah AT&T
Bell Laboratories). Bahasa C pertama kali digunakan pada komputer Digital
Standar bahasa C yang asli adalah standar dari UNIX. Sistem operasi, kompiler
C dan seluruh program aplikasi UNIX yang esensial ditulis dalam bahasa C.
Kepopuleran bahasa C membuat versi-versi dari bahasa ini banyak dibuat untuk
komputer mikro. Untuk membuat versi-versi tersebut menjadi standar, ANSI (American National Standards Institute) membentuk suatu komite (ANSI committee X3J11) pada tahun 1983 yang kemudian menetapkan standar ANSI
untuk bahasa C. Standar ANSI ini didasarkan kepada standar UNIX yang diperluas.
Kelebihan bahasa C :
a. Bahasa C tersedia hampir di semua jenis computer.
b. Kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis computer.
c. Bahasa C hanya menyediakan sedikit kata-kata kunci. hanya terdapat 32 kata kunci.
d. Proses executable program bahasa C lebih cepat e. Dukungan pustaka yang banyak.
f. C adalah bahasa yang terstruktur.
Kekurangan bahasa C :
a. Banyaknya operator serta fleksibilitas penulisan program kadang-kadang membingungkan pemakai.
b. Bagi pemula pada umumnya akan kesulitan menggunakan pointer.
2.7.1. Pr oses Kompilasi Dar i Linking Pr ogr am C
Agar suatu program dalam bahasa pemrograman dapat dimengerti oleh komputer,
program haruslah diterjemahkan dahulu ke dalam kode mesin. Adapun penerjemah yang
digunakan bisa berupa interpreter atau kompiler. Interpreter adalah suatu jenis
penerjemah yang menerjemahkan baris per baris intsruksi untuk setiap saat. Keuntungan
pemakaian interpreter, penyusunan program relatif lebih cepat dan bisa langsung diuji
sekalipun masih ada beberapa kesalahan secara kaidah dalam program. Sedangkan
kelemahannya, kecepatannya menjadi lambat sebab sebelum suatu instruksi dijalankan
selalu harus diterjemahkan terlebih dahulu. Selain itu, saat program dieksekusi interpreter
juga harus berada dalam memori. Jadi memori selalu digunakan baik untuk program
Gambar 2.8 Proses Kompilasi-Linking Dari Program C
2.7.2 Str uktur Penulisan Pr ogr am C
Program C pada hakekatnya tersusun atas sejumlah blok fungsi. Sebuah program minimal mengandung sebuah fungsi. Fungsi pertama yang harus ada dalam program C dan sudah ditentukan namanya adalah main(). Setiap fungsi terdiri atas satu atau beberapa pernyataan, yang secara keseluruhan dimaksudkan untuk melaksanakan tugas khusus. Bagian pernyataan fungsi (sering disebut tubuh fungsi) diawali dengan tanda kurung kurawal buka ({) dan diakhiri dengan tanda kurung kurawal tutup (}). Di antara kurung kurawal itu dapat dituliskan statemen-statemen program C. Namun pada kenyataannya, suatu fungsi bisa saja tidak mengandung pernyataan sama sekali.Walaupun fungsi tidak memiliki pernyataan, kurung kurawal haruslah tetap ada. Sebab kurung kurawal mengisyaratkan awal dan akhir definisi fungsi. Berikut ini adalah struktur dari program C
Main() {
Statemen-statemen ; fungsi utama }
Fungsi-fungsi lain() {
Statemen-statemen; fungsi-fungsi lain yang di tulis oleh pemrogr am }
program-program bagian. Fungsi-fungsi ini dapat ditulis setelah fungsi utama atau diletakkan di file pustaka (library). Jika fungsi-fungsi diletakkan di file pustaka dan akan dipakai di suatu program, maka nama file judulnya (header file) harus dilibatkan dalam program yang menggunakannya dengan preprocessor directive berupa #include.
2.7.3 Pengenalan Fungsi-Fungsi Dasar a. Fungsi main()
Fungsi main() harus ada pada program, sebab fungsi inilah yang menjadi titik awal dan titik akhir eksekusi program. Tanda { di awal fungsi menyatakan awal tubuh fungsi dan sekaligus awal eksekusi program, sedangkan tanda } di akhir fungsi merupakan akhir tubuh fungsi dan sekaligus adalah akhir eksekusi program. Jika program terdiri atas lebih dari satu fungsi, fungsi main() biasa ditempatkan pada posisi yang paling atas dalam pendefinisian fungsi. Hal ini hanya merupakan kebiasaan. Tujuannya untuk memudahkan pencarian terhadap program utama bagi pemrogram. Jadi bukanlah merupakan suatu keharusan.
b. Fungsi printf().
Fungsi printf() merupakan fungsi yang umum dipakai untuk menampilkan suatu keluaran pada layar peraga. Untuk menampilkan tulisan Selamat belajar bahasa C misalnya, pernyataan yang diperlukan berupa:
printf(“Selamat belajar bahasa C”);
atau parameter berupa string. Dalam C suatu konstanta string ditulis dengan diawali dan diakhiri tanda petik- ganda (“). Perlu juga diketahui pernyataan dalam C selalu diakhiri dengan tanda titik koma (;). Tanda titik koma dipakai sebagai tanda pemberhentian sebuah pernyataan dan bukanlah sebagai pemisah antara dua pernyataan.Tanda \ pada string yang dilewatkan sebagai argumen printf() mempunyai makna yang khusus. Tanda ini bisa digunakan untuk menyatakan karakter khusus seperti karakter baris-baru ataupun karakter backslash (miring kiri). Jadi karakter seperti \n sebenarnya menyatakan sebuah karakter. Contoh karakter yang ditulis dengan diawali tanda \ adalah:
\” menyatakan karakter petik-ganda \\ menyatakan karakter backslash \t menyatakan karakter tab
Dalam bentuk yang lebih umum, format printf() printf(“string kontrol”, daftar argumen); dengan string kontrol dapat berupa satu atau sejumlah karakter yang akan ditampilkan ataupun berupa penentu format yang akan mengatur penampilan dari argumen yang terletak pada daftar argumen. Mengenai penentu format di antaranya berupa:
%d untuk menampilkan bilangan bulat (integer)
%f untuk menampilkan bilangan titik-mengambang (pecahan) %c untuk menampilkan sebuah karakter
%s untuk menampilkan sebuah string Contoh :
printf(“No : %d\n”, 10); printf(“Nama : %s\n”, “Ali”); printf(“Nilai : %f\n”,80.5); printf(“Huruf : %c\n”,‘A’);
2.7.4 Pengenalan Pr aprosesor #Include
#include merupakan salah satu jenis pengarah praprosesor (preprocessor directive). Pengarah praprosesor ini dipakai untuk membaca file yang di antaranya
berisi deklarasi fungsi dan definisi konstanta. Beberapa file judul disediakan dalam C. File-file ini mempunyai ciri yaitu namanya diakhiri dengan ekstensi .h. Misalnya pada program #include <stdio.h> menyatakan pada kompiler agar membaca file bernama stdio.h saat pelaksanaan kompilasi.
Bentuk umum #include:
#include “namafile”
2.7.5 LCD (Liquid Cr ystal Display)
Dalam kamus besar bahasa ke wikepedian, arti dari LCD ( Liquid Crystal Display atau dapat di bahasa Indonesia-kan sebagai tampilan Kristal Cair ) adalah suatu jenis media tampilan yang menggunakan kristal cair sebagai penampil utama. LCD bisa memunculkan gambar atau tulisan dikarenakan terdapat banyak sekali titik cahaya (piksel) yang terdiri dari satu buah kristal cair sebagai sebuah titik cahaya. Walau disebut sebagai titik cahaya, namun kristal cair ini tidak memancarkan cahaya sendiri. Sumber cahaya di dalam sebuah perangkat LCD adalah lampu neon berwarna putih di bagian belakang susunan kristal cair tadi. Titik cahaya yang jumlahnya puluhan ribu bahkan jutaan inilah yang membentuk tampilan citra. Kutub kristal cair yang dilewati arus listrik akan berubah karena pengaruh polarisasi medan magnetik yang timbul dan oleh karenanya akan hanya membiarkan beberapa warna diteruskan sedangkan warna lainnya tersaring.
Gambar 2.9 LCD (Liquid Crystal Display)
2.7.6 Bahasa C Pada Mikr okontr oller ATMega 8535
Pemrograman mikrokontroller ATMega8535 dapat menggunakan low level language (assembly) dan high level language (C, Basic, Pascal, JAVA,dll) tergantung compiler yang digunakan. Bahasa Assembler mikrokontroller AVR memiliki kesamaan instruksi, sehingga jika pemrograman satu jenis mikrokontroller AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroller jenis mikrokontroller AVR. Namun bahasa assembler relatif lebih sulit dipelajari dari pada bahasa C.
C terletak diantara bahasa pemrograman tingkat tinggi dan assembly.
2.8 Softwar e Pemr ogaman Dan Softwar e Downloader
Kebanyakan pengguna mikrokontroller menggunakan Bahasa C dalam pemrogramannya, dengan alasan efisien. Dibanding dengan bahasa pemrograman lainnya, untuk program yang sama, Bahasa C memang menghasilkan hex code yang lebih kecil. Untuk lingkungan mikrokontroller yang memiliki ruang program memory terbatas, maka efisiensi menjadi sebuah keharusan. Untuk mikrokontroller AVR, terdapat beberapa compiler Bahasa C yang dapat disarankan.
Yang pertama adalah CodeVisionAVR. Compiler komersial ini banyak digunakan di Indonesia. Dokumentasi dalam bentuk buku pun cukup banyak. Ini menjadi suatu pertanyaan tersendiri kenapa banyak penulis yang menggunakan rujukan CodeVision AVR, yang notabene produk berbayar, CodeVision AVR versi evaluasi dapat di-download di halaman situs http://www.hpinfotech.com/, dan dapat digunakan secara gratis meskipun dengan kemampuan yang di batasi.
Yang ketiga adalah ICC AVR dari Image Craft. Produk komersial ini cukup serius, terbukti sejumlah vendor besar dalam bidang robotik untuk pendidikan, menggunakannya. ICC AVR menggunakan rujukan ANSI C dan menyediakan plug-in untuk penggunaan di lingkungan AVRStudio. Versi demo dapat digunakan selama 45 hari.
Yang keempat adalah MikroC for AVR dari Mikroelektronika. Produk ini mudah digunakan, namun tidak sedikit bugs yang ditemukan, terutama dalam penanganan kasus logika yang cukup rumit, semisal implementasi PID pada robot line following. Versi evaluasi dibatasi sampai 2k saja.
Tetapi di sini penulis menggunakan codevision AVR sebagai software kompiler sekaligus software downloader/programmer, karena beberapa kelebihannya di banding software-software yang lain.
2.8.1 CodeVision AVR
CodeVisionAVR merupakan sebuah cross-compiler C, Integrated Development Environtment (IDE), dan Automatic Program Generator yang didesain untuk mikrokontroller buatan Atmel seri AVR. CodeVisionAVR dapat dijalankan pada sistem operasi Windows 95, 98, Me, NT4, 2000, dan XP. Cross-compiler C mampu menerjemahkan hampir semua perintah dari bahasa ANSI C,
berupa software AVR Chip In-Sistem Programmer yang memungkinkan untuk melakukan transfer program kedalam chip mikrokontroller setelah sukses melakukan kompilasi secara otomatis. Software In-Sistem Programmer didesain untuk bekerja dengan Atmel STK500/AVRISP/AVRProg, Kanda Sistems STK200+/300, Dontronics DT006, Vogel Elektronik VTEC-ISP, Futurlec JRAVR dan MicroTronics ATCPU/Mega2000 programmers/development boards. Untuk keperluan debugging sistem embedded, yang menggunakan komunikasi serial, IDE mempunyai fasilitas internal berupa sebuah Terminal. Selain library standar C, CodeVisionAVR juga mempunyai library tertentu untuk:
1) Modul LCD alphanumeric 2) Bus I2C dari Philips
3) Sensor Suhu LM75 dari National Semiconductor
4) Real-Time Clock: PCF8563, PCF8583 dari Philips, DS1302 dan DS1307 dari Maxim/Dallas Semiconductor
5) Protokol 1-Wire dari Maxim/Dallas Semiconductor
6) Sensor Suhu DS1820, DS18S20, dan DS18B20 dari Maxim/Dallas Semiconductor
7) Termometer/Termostat DS1621 dari Maxim/Dallas Semiconductor 8) EEPROM DS2430 dan DS2433 dari Maxim/Dallas Semiconductor 9) SPI
10)Power Management 11)Delay
12)Konversi ke Kode Gray
CodeWizardAVR, yang mengijinkan kita untuk menulis, dalam hitungan menit, semua instruksi yang diperlukan untuk membuat fungsi-fungsi berikut:
1) Set-up akses memori eksternal 2) Identifikasi sumber reset untuk chip 3) Inisialisasi port input/output
4) Inisialisasi interupsi eksternal 5) Inisialisasi Timer/Counter 6) Inisialisasi Watchdog-Timer
7) Inisialisasi UART (USART) dan komunikasi serial berbasis buffer yang digerakkan oleh interupsi
8) Inisialisasi Pembanding Analog 9) Inisialisasi ADC
10)Inisialisasi Antarmuka SPI 11)Inisialisasi Antarmuka Two-Wire 12)Inisialisasi Antarmuka CAN
13)Inisialisasi Bus I2C, Sensor Suhu LM75, Thermometer/Thermostat DS1621 dan Real-Time Clock PCF8563, PCF8583, DS1302, dan DS1307
Gambar 2.9 Alur Pemrogaman Code Vision AVR
2.9 Ter nak Itik
Itik dikenal juga dengan istilah Bebek (bhs.Jawa). Nenek moyangnya berasal dari Amerika Utara merupakan itik liar ( Anas moscha) atau Wild mallard. Terus menerus dijinakkan oleh manusia hingga jadilah itik yang diperlihara sekarang yang disebut Anas domesticus (ternak itik). Peternakan itik umumnya untuk menghasilkan telur. Tetapi itik yang telah lewat masa produksinya maupun itik jantan, sebenarnya sangat potensial untuk dikembangkan menjadi itik potong. Masyarakat kita, saat ini semakin menggemari daging itik/bebek. Hal ini dapat dilihat dari menjamurnya rumah makan yang menyajikan nasi bebek. Akan tetapi pemenuhan kebutuhan bebek potong masih amat tradisional dan dalam bentuk bebek petelur afkir atau pejantan pejantan yang dipelihara seadanya. Untuk memenuhi kebutuhan dan kegemaran masyarakat akan daging itik tersebut, perlu diusahakan suatu usaha peternakan itik potong yang dapat menjamin pemenuhan kebutuhan masyarakat.
jantan mempunyai beberapa keunggulan dan keuntungan kalau ditinjau dari segi ekonomisnya. Untuk harga bibit, itik jantan lebih murah jika dibandingkan itik betina, karena masyarakat selama ini hanya mengenal dan memetik keuntungan dari itik betina sebagai petelur. Pemeliharaannya tidak membutuhkan waktu yang lama, hanya dalam waktu 2-3 bulan sudah dapat dipetik hasilnya. Ini disebabkan karena pertumbuhan dan perkembangan tubuhnya relatif lebih baik daripada itik betina. Berat badan sampai saat dipotong tidak kurang dari 1,5 kg. Dengan memanfaatkan itik jantan, dalam waktu yang relatif singkat sudah dapat dicapai berat yang lebih dibutuhkan. Hal ini sangat menguntungkan konsumen jika dibandingkan dengan itik afkir. Pemotongan pada umur yang relatif muda, menghasilkan daging yang lebih empuk, lebih gurih dan nilai gizinya lebih tinggi.
2.9.1 Kandang Dan Pakan Ter nak Itik
Sistem perkandangan dan pemberian pakan merupakan hal terpenting untuk melaksanakan peternakan secara intensif. Perkandangan itik potong jantan, seperti halnya ayam broiler dengan sistem kandang kering, dimana luas per ekor sekitar 0,25 m2. Separuh bagian kandang ditutup dengan atap rumbia, genteng atau yang lainnya sebagai pelindung dan tempat istirahat. Sedangkan separuh
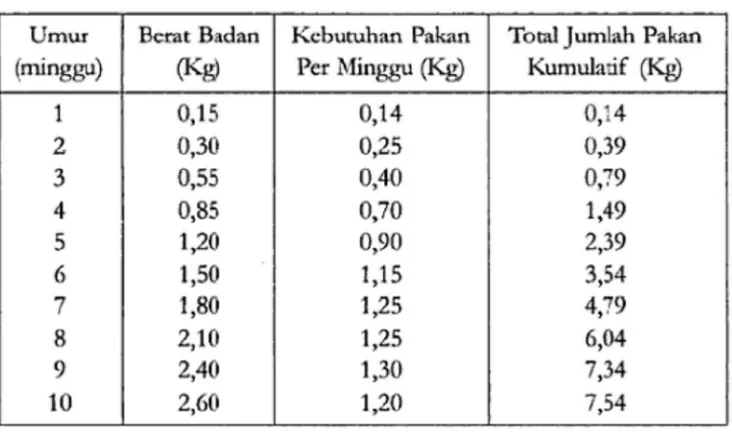
2.9.2 Kebutuhan makan ter nak itik
untuk satu ekor 6-7 kg. Itik umur 1-16 hari membutuhkan protein 21% dan pada umur 17-30 hari kadar proteinnya diturunkan hingga 15,5-16%. Kebutuhan makan itik mulai dari umur 1 minggu sampai masa panen bisa dilihat pada gambar 2.11.
Gambar 2.11 Tabel kebutuhan pakan itik
3,5 m
3,5 m 2 m
40 cm
10 m
3,5 m
secara murah, yakni melalui pemanfaatan limbah-limbah hasil kelautan atau tambak, daging bekicot dan lain-lain. Bisa juga dengan menambahkan enzym-enzym pencernaan agar didapatkan pertumbuhan yang lebih cepat.
Gambar 2.10 Gambar Kandang Itik Tradisional
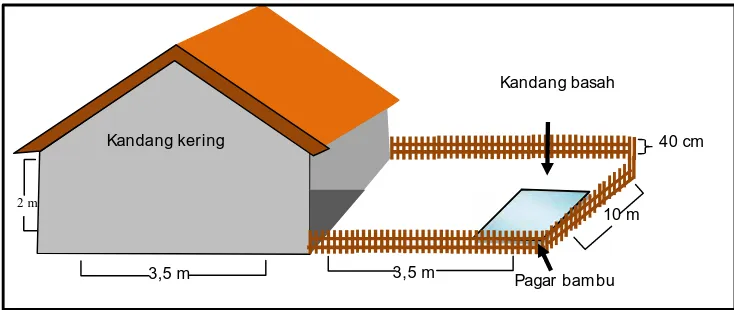
2.9.3 Bater r y Room Far m Pada Itik
Metode baterry room farm adalah metode pengandangan yang baru dalam ternak itik dan merupakan modifikasi dari sistem kandang ren, dimana semua kegiatan makan dan minum itik di lakukan di dalam kandang tanpa ada halaman untuk bemain itik. Penggunaan metode ini masih jarang di gunakan karena hanya peternak yang terdaftar sebagai anggota dari suatu perkumpulan peternak itik saja yang bisa memakai metode ini, metode ini akan terus berkembang karena para peternak akan terus berusaha menyempurnakan metode ini untuk hasil yang lebih maksimal kedepannya.
Metode ini juga berbeda dengan metode kandang baterry biasa yang sistemnya terdiri dari kandang panjang yang tebuat dari jaring kawat dan di pilah
Kandang kering
Kandang basah
satu itik satu tempat saja. Metode ini menempatkan itik dalam satu ruangan dengan luas sekitar 3 m dengan kapasitas 15 ekor itik, di dalam ruangan ini itik harus selalu dalam keadaan bersih, makanan, minuman dan udara agar itik selalu sehat dan tepat waktu masa panen, skema kandang baterry room farm dapat di lihat pada Gambar 2.10.
Ga mbar 2.11 Skema Baterry Room Farm
BAB III
PERANCANGAN SISTEM
Pada sub bab ini akan dijelaskan teori pendukung yang diperlukan untuk tugas akhir ini. Selanjutnya akan dibahas mengenai Analisa dan Perancangan sistem “ Sistem Sirkulasi Udara Otomatis Menggunakan Microcontroller 8535 pada Battery Room Farm ”.Dapat disimpulkan bahwa Analisa dan Perancangan Sistem adalah suatu proses memahami sistem kemudian merancang sistem tersebut yang bertujuan agar dapat mengatasi berbagai masalah yang terjadi.
3.1. Per ancangan Sistem
Pada perancangan sistem sirkulasi udara otomatis ini dibagi menjadi 3 bagian, yaitu :
1. Bagian input,
Bagian input merupakan sumber perintah yang diproses mikrokontroller sumber perintah ini berasal dari inputan user yang di simpan di dalam dan mikrokontroller dan sensor suhu LM35.
2. Bagian pemroses
Pada bagian pemroses terdapat rangkaian mikrokontroller ATMega8535 yang memiliki fungsi sebagai pengatur atau pengolah data yang masuk melalui bagian input, selanjutnya akan diolah dan diteruskan ke bagian output.
3. Bagian output
mikrokontroller dan menghasilkan sebuah output berupa visualisasi ataupun langkah kerja. Berikut merupakan gambar blok sistem sirkulasi udara otomatis.
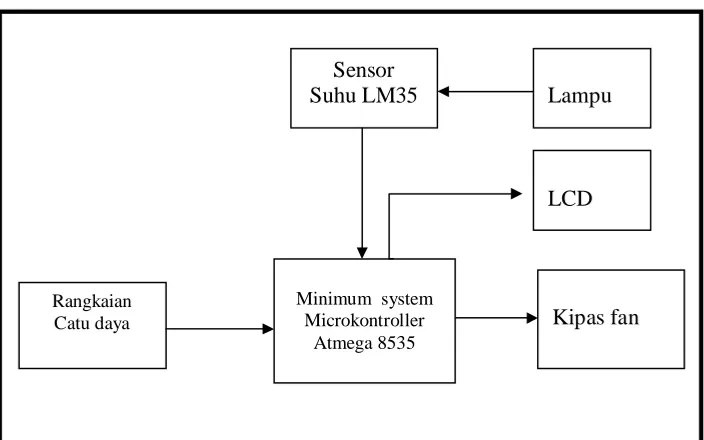
Gambar 3.1 Diagram Blok Sistem sirkulasi udara otomatis
Sistem sirkulasi udara otomatis ini memiliki perancangan perangkat keras sebagai berikut:
• Mikrontroller ATMega8535 : 1 buah • Sensor suhu LM35 : 2 buah • adaptor AC-DC : 1 buah • Lampu : 1 buah • Kipas fan : 2 buah
• LCD : 1 Buah
Dan berikut penjelasan dari masing-masing komponen yang terdapat pada diagram blok pada Gambar 3.1.
Rangkaian Catu daya
Sensor
Suhu LM35 Lampu
Kipas fan
Minimum system Microkontroller
Atmega 8535
1. Mikrokontroller
Mikrokontroller ATMega8535 merupakan komponen rangkaian utama yang berfungsi sebagai pengolah data sistem sirkulasi udara otomatis, data yang diterima mikrokontroller sebagai input akan diproses untuk selanjutnya akan menjadi output sesuai program algoritma yang telah ditetapkan.
2. Sensor Suhu LM35
Sensor suhu LM35 merupakan penguat sederhana yang berfungsi untuk memperkuat sinyal / tegangan output analog sensor suhu LM35. Sensor Suhu LM35 merupakan komponen utama yang berfungsi untuk mengatur suhu ruangan battery room farm.
3. Rangkaian Catu Daya
Rangkaian ini berfungi untuk mengubah tegangan dari AC ke DC yang masuk ke dalam komponen-komponen dalam sistem sirkulasi udara otomatis, tegangan yang di gunakan adalah 10v.
4. Lampu
Rangkaian ini berfungsi untuk memberikan suhu panas yang nanatinya akan diterima oleh Sensor Suhu LM35.
5. Kipas fan
6. Liquid Crystal Display
Liquid Crystal Display atau yang biasa di singkat dengan LCD berfungsi untuk memberikan informasi suhu udara didalam ruangan pada user yang telah di inputkan dan proses yang sedang berjalan.
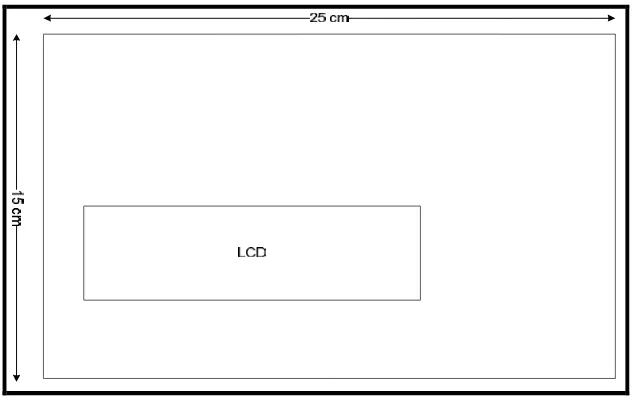
3.2. Perancangan Sistem Har dwar e
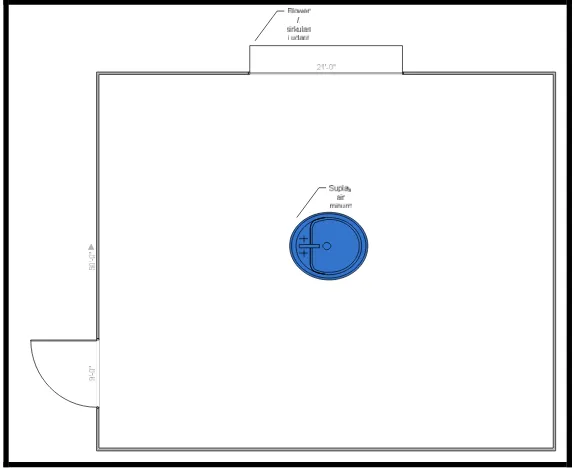
Sistem sirkulasi udara ini memiliki dimensi 25x15 cm . Rangkaian sistem ini di tempatkan dalam sebuah box, di box tersebut terdapat LCD yang menunjukkan informasi suhu rungan battery room farm. Desain sistem Sistem sirkulasi udara otomatis dapat di lihat pada Gambar 3.2.
Gambar 3.2 Desain Sistem sirkulasi udara otomatis
3.2.1. Rangkaian Keselur uhan Sistem
sebelumnya yaitu: bagian input, bagian pemroses dan bagian output.
Bagian pemroses yang terdiri dari minimum sistem mikrokontroller merupakan bagian dimana inputan user akan diproses sesuai dengan program yang digunakan kemudian diteruskan ke bagian output. Bagian input merupakan sensor LM35 yang digunakan untuk mendeteksi suhu ruangan, yang kemudian akan menjadi dasar dari berjalannya sistem. Bagian output terdiri dari 1 buah LCD 16x2 untuk mengetahui hasil inputan user dan informasi temperature suhu, 2 buah kipas fan yang berfungsi sebagai mengatur udara agar selalu bersih dan suhu rungan tidak panas.
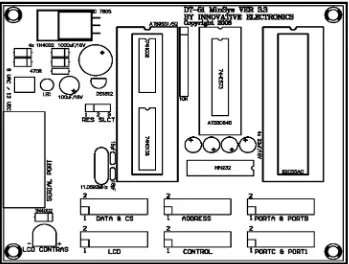
3.2.2. Rangkaian Minimum Sistem ATMega 8535
Sistem minimum yang di gunakan adalah sistem minimum mikrokontroller ATMega 8535 buatan inovative electronics. Sistem minimum ini telah terintegrasi dengan 32 jalur I/O dari mikrokontroller ATMega8535, dapat digunakan untuk mem-download-kan program ke mikrokontroller dengan interfacing USB serta dapat digunakan dengan power supply sebesar 5 volt atau 7-24 volt. Port I/O yang di gunakan untuk sistem sirkulasi udara otomatis ini adalah sebagai berikut : Port A di gunakan untuk interfacing LCD 16x2, port B di gunakan untuk interfacing push button, port C di gunakan untuk interfacing kipas dan interfacing real time clock. Skema rangkaian minimum
Gambar 3.3 Skematik Minimum Sistem ATMega 8535
3.2.3. Rangkaian Real Time Clock
DS1307 merupakan Real-time clock (RTC) menggunakan jalur data parallel yang dapat meyimpan data-data detik, menit, jam, tanggal, bulan, hari dalam seminggu, dan tahun valid hingga 2100. 56-byte, battery-backed, RAM nonvolatile (NV) RAM untuk penyimpanan, fitur-fitur DS1307:
1. Real-time clock (rtc) menghitung detik, menit, jam,tanggal,bulan dan hari dan tahun valid sampai tahun 2100.
2. Ram 56-byte, nonvolatile untuk menyimpan data.
3. 2 jalur serial interface (i2c).
4. Output gelombang kotak yang diprogram.
5. Automatic power-fail detect and switch
7. Mode dengan oscillator running.
8. Temperature range: -40°c sampai +85°c.
3.2.4 Rangkaian LCD
LCD yang di gunakan dalam sistem ini adalah LCD 16x2, maksud dari 16x2 adalah 16 kolom dan 2 baris, Modul LCD memiliki karakteristik sebagai berikut:
1. Terdapat 16 x 2 karakter huruf yang bisa ditampilkan. 2. Setiap huruf terdiri dari 5x7 dot-matrix cursor.
3. Terdapat 192 macam karakter.
4. Terdapat 80 x 8 bit display RAM (maksimal 80karakter). 5. Memiliki kemampuan penulisan dengan 8 bit atau dengan 4 bit. 6. Dibangun dengan osilator lokal.
7. Satu sumber tegangan 5 volt.
8. Otomatis reset saat tegangan dihidupkan. 9. Bekerja pada suhu 0oC sampai 55oC.
3.2.5. Rangkaian Catu Daya
Rangkaian catu daya dirancang untuk berfungsi sebagai sumber listrik yang digunakan untuk menyuplai seluruh kebutuhan listrik dari rangkaian yang ada pada sistem ini. Sumber tegangan pada rangkaian ini berasal dari tegangan AC atau bolak balik. Akan tetapi karena mikrokontroller membutuhkan tegangan 5 volt dengan tegangan DC atau searah maka dibutuhkan juga catu daya yang bisa merubah tegangan AC menjadi DC dengan tegangan 5 V, untuk membuat rangkaian ini dibutuhan 1 buah IC regulator 7805 yang berfungsi untuk merubah arus dari AC menjadi DC dan menurunkan tegangan menjadi 5V serta kapasitor sebagai filternya. Gambar dari rangkaian penyearah dan penurun tegangan ditunjukkan pada Gambar 3.6.
Gambar 3.6 Rangkaian Catu Daya Penurun Tegangan
3.3. Per ancangan Softwar e
Perancangan software merupakan proses perancangan pembuatan program yang nantinya akan dijalankan oleh mikrokontroller . Program ini nantinya akan menjadi rutin yang akan selalu dijalankan ketika mikrokontroller dinyalakan. Program ini akan disimpan pada EEPROM yang ada didalam mikrokontroller, sehingga hanya perlu sekali men-download- kan program ke mikrokontroller, walaupun sumber tegangan dimatikan program masih tersimpan pada EEPROM.
3.4 Per ancangan Sistem keselur uhan
secara keseluruhan bisa berjalan dengan baik. Untuk lebih jelasnya dapat dilihat pada gambar 3.8 dibawah ini.
3.5 Flowchar t micr ocontr oler
Dari proses sistem yang akan di buat nantinya proses awal yaitu mengecek suhu ruangan saat suhu di dalam melebihi set point yang dikehendaki, maka kipas akan menyala untuk membantu proses pendinginan.
LM35 digunakan sebagai sudut ruangan sensor pendeteksi suhu di dalam ruangan. Rangkaian sensor suhu ini akan taruh dibawah lampu sehingga sensor ini dapat mengetahui seberapa panas suhu di dalam ruangan. Kemudian terhubung dengan mikrokontroller dan rangkaian lain seperti rangkaian LCD, dapat dilihat berapa suhu yang terdeteksi di dalam ruangan.
Pada pengendalian sirkulasi udara otomatis yang dilakukan oleh mikrokontroller adalah berdasarkan pengaruh suhu. Pengendalian suhu dijaga dengan menggunakan pendingin berupa kipas hal ini dimaksud agar suhu tetap terjaga.
Pengendalian sirkulasi udara dengan memanfaatkan suhu bermula dari sensor yang mendeteksi suhu panas. Proses awal melakukan pemeriksaan terlebih dahulu apakah suhu yang terdeteksi merupakan suhu terendah yaitu dibawah 28
(suhu < 28). Jika suhu dibawah 28°C maka dikatakan normal sehingga kipas 1 dan 2 tidak menyala.
saat suhu terdeteksi pada tingkatan panas yang berkira antara 29 °C hingga 34°C maka kipas 1 akan berputa secara otomatis. Selanjutannya sistem akan memeriksa suhu, yang mana saat kondisi makin panas yaitu melebihi tingkat panas yang sebelumnya. jika panas selanjutnya berkisar 36°C hingga 40°C maka kipas 2 akan menyala.
Apabila padapendeteksian suhu selanjutnya terdeteksi diatas 40°C maka harus mendinginkan suhu agar kembali menjasi normal yang mana akan menyala untuk kipas I dan kipas 2. Hal ini akan terus dilakukan hingga suhu kembali normal. Saat suhu kembali normal yaitu ditandai bahwa kipas 1 mati. Selain itu kipas 2 pasti mati jika kipas 1 mati dikarenkan perbedaan suhu yang dikenali sitem maka dari kondisi kipas 1 yang mana juga merupakan tingkat suhu yang pertama.
BAB IV IMPLEMENTASI
Pada bab ini akan membahas tentang implementasi program dari hasil analisa dan perancangan sistem pada bab III, serta bagaimana cara sistem tersebut dijalankan.
4.1. Implementa si Rangka ian Per angkat Lunak
Pengujian perangkat lunak bertujuan untuk memastikan semua program dapat berjalan dengan baik di dalam rangkaian perangkat keras, sehingga di butuhkan pengaturan untuk memastikannya berjalan dengan baik.
4.1.1. Pembuatan File Pr oject Pada Code Vision AVR
Pada sub bab ini akan di jelaskan cara membuat suatu project yang di dalamnya terdapat source code yang akan di download ke dalam rangkaian mikrokontroller.
Gambar 4.1 Tampilan Menu Pada Code Vision AVR
Langkah selanjutnya adalah code vision AVR akan menanyakan apakah ingin melalui proses wizard untuk memilih jenis mikrokontroller yang di pakai, tampilan menu wizard bisa di lihat pada Gambar 4.2.
Pada menu wizard terdapat banyak pilihan menu untuk men setting mikrokontroller yang akan di pakai, di antaranya berapa besar clock yang akan di pakai, setting port yang akan di pakai dan masih banyak lagi setting dan akan membuat mikrokontroller dapat bekerja dengan baik.
Untuk selanjutnya adalah melakukan setting inisialisasi port pada menu wizard ini, pada mikrokotroller ATMega 8535 terdapat 4 port yaitu port A, port B, port C dan port D, di sini penulis akan menentukan mana saja port yang akan di pakai, dan setting sebagai port inputan atau port output, proses menu inisialisasi dapat di lihat pada Gambar 4.3.
Gambar 4.3 Inisialisasi Pada Menu Wizard
project dan menghindari file project tidak teratur dalam satu tempat maka dalam pembuatan project ini sebaiknya file project ini di simpan dalam satu folder.
Setelah proses penulisan code selesai untuk proses selanjutnya adalah meng compile code yang telah di buat, hal ini bertujuan untuk mengetahui adanya kesalahan atau error dalam pembuatan program.
Gambar 4.4 Hasil Compile Pada Program
Gambar 4.5 Proses Download Program Ke Dalam Mikrokontroller
Proses di atas adalah proses download progam jika tidak ada kesalahan dalam setting maupun perangkat mikrokontroller ataupun downloader, pada Gambar 4.6 dapat di lihat kegagalan proses dowload program ke dalam mikrokontroller.
Gambar 4.6 Pesan Error Dalam Proses Download Program
Jika muncul pesan error seperti di atas kemungkinan yang terjadi adalah suplay tegangan ke dalam mikrokonteroller belum terjalin dengan baik, perangkat downloader belum di nyalakan atau kerusakan pada mikrokoteroller yang penulis
4.1.2. Instalasi USB AVR Downloader
Pada sub bab ini di jelaskan bagaimana melakukan instalasi USB AVR downloader dengan code vision AVR, agar dapat di gunakan untuk mendownload
program yang telah di buat ke dalam mikrokontroller.
Berikut ini di jelaskan proses setting USB AVR Downloader di dalam code vison AVR, operating sistem yang di gunakan adalah windows profesional xp sp3 dan menggunakan code vision versi 2.05.0 :
1. Hubungkan Perangkat downloader dengan PC atau laptop, windows akan mengenali adanya hardware baru yang terkoneksi dengan PC atau laptop, setelah itu pilih mode “yes ,this time only”
2. Tunggu proses instalasi driver sampai selesai, setelah selesai tekan finish. Untuk memastikan apakah perangkat downloader sudah terinstall dengan benar dapat di lihat pada menu device manager.
Gambar 4.7 Kode IC Yang Dapat Di Kenali Oleh Perangkat Downloader
Gambar 4.8 Menu Tools Pada Code Vision AVR
5. Masukkan file setting yang telah di buat dan open.
Gambar 4.9 Menu Browse Pada Tools Code Vision AVR
4.2. Implementasi Per angkat Keras
Pengujian komponen elektronik yang juga berfungsi sebagai hardware dilakukan untuk melihat apakah komponen yang akan digunakan telah dirangkai dengan baik, sehingga akan menghasilkan suatu rangkaian alat yang baik dan sesuai dengan desain perencanaan yang telah dibuat sebelumnya.
4.2.1. Implementa si Minimum Sistem ATMega 8535
Pengujian ini digunakan untuk mengetahui apakah semua port dari mikrokontroller dapat berfungsi dengan baik sesuai dengan program yang nantinya akan diberikan. Cara untuk melakukan pengujiannya adalah dengan memberikan source code program berikut pada mikrokontroller .
#include <mega8535.h> #include <delay.h> void main(void) { DDRA= 0xFF; PORTA= 0xFF; DDRB= 0xFF; PORTB= 0xFF; DDRC= 0xFF; PORTC= 0xFF; DDRD= 0xFF; PORTD= 0xFF; while (1) { PORTA =0; PORTB=0; PORTC=0; PORTD=0; delay_ms(500); PORTA=1; PORTB=1; PORTC=1; PORTD=1; delay_ms(500);}};
bernilai “0” maka LED akan menyala, setelah delay sebesar 500 ms atau 0.5 detik, port mikrokontroller akan diberi logika bernilai “1” yang akan menyebabkan LED pada port padam.
4.2.2. Implementasi Rangkaian Push Button
Pengujian rangkaian Push Button ini bertujuan untuk mengetahui bagaimana cara akses input untuk mikrokontroller , yang akan digunakan untuk seleksi menu ataupun untuk seting dari tanggal waktu dan tanggal masuk.
Rangkaian push button ini berkarakteristik seperti rangkaian switch, tetapi bersifat sementara jika tekanan dilepaskan yang menjadikan nilai output pada push button menjadi 0, sesuai dengan rangkaian yang mempunyai resistor pulldown. Setiap penekanan akan menghasilkan sinyal yang akan diproses oleh
mikrokontroller .
Gambar 4.10 Gambar Rangkaian Push Button
Pada program diatas mikrokontroller akan menyalakan led1 jika ditekan push button 1 dan jika push button 2 di tekan maka led 2 akan menyala.
4.2.3. Implementasi Rangkaian LCD (Liquid Cr ystal Display)
Pengujian rangkaian LCD ini bertujuan untuk mengetahui apakah semua perangkat dalam rangkaian LCD bekerja dengan baik ketika sudah di berikan program di dalamnya, untuk mengujinya di gunakan program di bawah ini.
#incl
ude <mega8535.h> #include <delay.h> #include <lcd.h>
#define PIND.0 PB0 #define PIND.1 PB1 #define PORTC.0 LED1 #define PORTC.1 LED2
PORTD=0x00;
DDRD=0xFF; //pin d digunakan untuk input
LED=0b00000001;
void main(void) {
Setelah program di download di dalam mikrokontroller yang telah di hubungkan dengan rangkaian liquid crystal display maka akan muncul tulisan seperti gambar di Gambar 4.5, pengaturan koordinat x dan y dalam program ada pada fungsi lcd_gotoxy dan untuk menampilkan pesan dalam lcd digunakan fungsi lcd_putsf, kedua fungsi itu berperan penting dalam hasil output program tersebut selain inisialisasi di port A, fungsi header juga ada dalam penulisan code ini dan telah di sediakan fungsi library nya oleh code vision AVR agar rangkaian liquid crystal display dan rangkaian mikrokontroller dapat di kenali oleh
perangkat mikrokontroller.
#incl
ude <mega8535.h> #include <delay.h> #include <lcd.h>
// Alphanumeric LCD Module functions #asm
.equ __lcd_port=0x1B ;PORTA #endasm
#include <lcd.h>
void main(void) {
lcd_gotoxy(0,0); lcd_putsf("ADC 062"); lcd_gotoxy(0,1);
lcd_putsf("Suhu 0025.45");
Gambar 4.11 Gambar Hasil Dari Pengujian Rangkain Lcd
4.2.4. Implementasi Rangkaian Catu Daya
Tegangan yang masuk ke dalam sistem ini haruslah tegangan searah sebesar +10v, maka di buatlah sebuah rangkaian catu daya yang dapat merubah tegangan dari bolak balik menjadi searah dan membuatnya menjadi +10v sesuai dengan yang di butuhkan rangkaian sistem, sehingga meminimalisasi terjadinya konselting karna salah tegangan atau kelebihan tegangan.
Gambar 4.14 Rangkaian Catu Daya
rangkaian catu daya. Pada pengukuran yang dilakukan dititik uji yaitu dibagian suplai tegangan utama yang terletak di power tegangan bolak balik dan di bagian output catu daya +10v, maka hasil yang didapatkan ialah seperti yang ditampilkan pada Tabel 4.1 dibawah ini.
Tabel 4.1 Hasil Pengukuran Catu Daya
Supplay tegangan (AC) Output catu daya (DC)
220 v 10 v
4.3 Implementasi Sistem Mick rokontr oller
Pada sub bagian implementasi sistem mickrokontroller merupakan source code sistem sirkulasi udara otomatis secara keseluruhan. Sitem ini terdiri dari pendeteksian suhu dan inisialisasi kipas, Out put pendeteksian suhu pada LCD dan pengendalian kipas berdasarkan suhu.
4.3.1 Mendeteksi Suhu Dan Inisialisasi Kipas
4.3.2 Out put Mendeteksi Suhu Pada LCD
Pengujian pendeteksian out put suhu pada LCD berfungsi untuk mengetahui kinerja dari sensor LM35 yang berfungsi sebagai sensor suhu. sedangkan LCD merupak sebagai sarana menampilkan informasi temperatur suhu, berikut adalah programnya.
// Timer 0 overflow interrupt service routine interrupt [TIM0_OVF] void timer0_ovf_isr(void) {
// Read the 8 most significant bits
// of the AD conversion result
adc_data=ADCH;
//suhu0=adc_data%100; //suhu=suhu0+28;
suhu=adc_data*0.019607*17; // Place your code here sprintf(kalimat,"%d ",suhu);
lcd_gotoxy(11,1); lcd_puts(kalimat); delay_ms(500); lcd_gotoxy(14,1); lcd_putsf("'C"); delay_ms(500);
// Start ADC again ! ADCSRA = ADCSRA | 0x40; delay_ms(1000);
4.3.3 Pengendalian Kipas Ber dasar kan Suhu
if(suhu<28){ lampu=1; delay_ms(1000); }
if(suhu>=29 && suhu<=34){ lampu=1;
kipas_out=1; delay_ms(1000); }
if(suhu>=36 && suhu<=40){ lampu=1;
kipas_out=1; kipas_in=1; delay_ms(1000); }
if(suhu>41){ lampu=0;
kipas_out=1; kipas_in=1; delay_ms(1000); }
68 BAB V UJ I COBA
Pada bab ini akan dibahas mengenai uji coba terhadap sistem yang telah dibuat dan selanjutnya akan dibuat evaluasi dari hasil uji coba tersebut. Untuk mengetahui keberhasilan dan kekurangan dari sistem yang telah dibuat, Uji coba dilakukan untuk memastikan apakah yang dirancang sudah sesuai dengan yang direncanakan.
5.1 Lingkungan Uji Coba
Lingkungan Uji coba sistem ini dilakukan dengan:
1. Pemrogaman menggunakan bahasa C untuk mikrokontroler.
2. Software pemrogaman dan software downloader menggunakan code vision AVR versi 2.05.0.
3. Operating sistem mengunakan windows xp profesional version 2002 service pack 3.
4. Suhu kandang itik 36° C saat siang hari dan 28° C saat malam hari. 5. Semua itik dalam keadaan sehat saat di lakukan uji coba.
6. Komponen gizi makanan dan minuman yang di berikan itik semua sama dengan sistem tradisional.
7. Jumlah itik per kandang 20 ekor. 5.2. Pelaksanaan uji coba
5.2.1 Pelaksanaan uji coba standar isasi
Hasil dari pengujian standarisasi merupakan hasil dari membandingkan suhu thermometer dengan sensor LM35 dapat dilihat pada tabel 5.1.
Hasil dari pengujia standarisasi dapat juga di lihat pada grafik 5.1
Gr afik 5.1 Gr afik perbandingan suhu sensor LM35 dengan thermometer NO Suhu sensor LM35 Suhu thermometer
1. 30 °C 29 °C
2. 34 °C 33 °C
3. 35 °C 34 °C
4. 37 °C 36 °C
Suhu
Tabel 5.1 uji coba standarisasi
Untuk mengetahui proses perbandingan suhu pada sistem sirkulasi udara otomatis bisa dilihat pada tabel 5.2.
NO Suhu sensor LM35 Suhu thermometer
1.
2.
Pada tabel 5.2 Perbandingan suhu sensor LM35 dengan thermometer merupakan pengukuran standarisasi yang mana perbedaan suhu itu dikarenakan kondisi ruangan. Pada tabel No 1 - 4 perbedaan Suhu sensor LM35 dengan thermometer berdeda 1°C .
5.2.2 Pelaksanaan uji coba tingkat keber hasilan
Pelaksanaan uji coba sistem sirkulasi udara otomatis membutuhkan beberapa tahapan diantaranya :
3.
1. Tahap per tama
Tahap pertama pada waktu proses pengecekan suhu membutuhkan waktu kurang lebih 1 menit agar suhu ruangan bisa mencapai 32°C, dengan meningkatnya suhu ruangan maka secara otomatis kipas akan berputar.
2. Tahap kedua
Untuk tahap yang kedua proses pendinginan ruangan kandang pada suhu 35°C menggunakan waktu kurang lebih 40 detik, yang mana kipas 1 akan melakukan proses pengeluaran udara yang bertujuan agar suhu udar