51
PEMBAHASAN
3.1.Tinjauan Umum Alat
Alat pemilah sampah otomatis adalah sebuah alat yang berguna untuk memilah sampah secara otomatis berdasarkan jenis sampah tersebut. Jenis sampah yang dideteksi oleh alat ini adalah jenis sampah logam dan non-logam yang kemudian akan ditampilkan dalam bentuk tulisan yang berupa keterangan dalam sebuah LCD.
Pemilahan sampah yang dilakukan bertujuan untuk mempermudah proses recycle sampah yang masih bisa didaur ulang. Untuk itu, alat ini dapat digunakan sebagai alternatif untuk pemilahan sampah sebelum sampai ke TPA (Tempat Pembuangan Akhir).
Cara kerja alat ini adalah ketika sampah dimasukkan ke dalam lubang pembuangan sampah kemudian sensor proximity akan mendeteksi jenis sampah yang masuk, kemudian Arduino UNO akan mengolah dan memproses hasil dari sensor yang digunakan, kemudian LCD akan menampilkan keterangan jenis sampah yang masuk dan sampah akan diteruskan ke lubang tempat sampah sesuai dengan jenisnya oleh motor servo.
3.2. Blok Rangkaian Alat
Sumber : Penulis
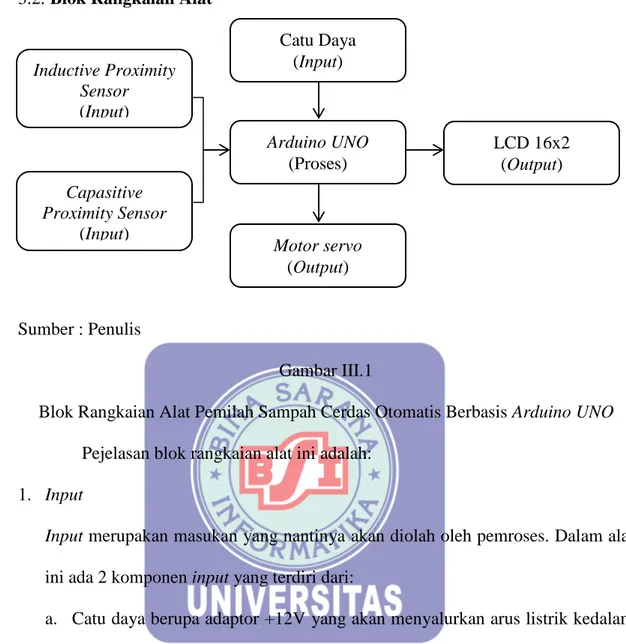
Gambar III.1
Blok Rangkaian Alat Pemilah Sampah Cerdas Otomatis Berbasis Arduino UNO Pejelasan blok rangkaian alat ini adalah:
1. Input
Input merupakan masukan yang nantinya akan diolah oleh pemroses. Dalam alat ini ada 2 komponen input yang terdiri dari:
a. Catu daya berupa adaptor +12V yang akan menyalurkan arus listrik kedalam rangkaian alat.
b. Proximity sensor yang berfungsi untuk mendeteksi jenis sampah logam maupun non-logam.
2. Proses
Proses merupakan komponen yang sangat penting dalam alat ini. Berfungsi sebagai pengolah atau pemroses data yang masuk dari input-an dalam hal ini adalah proximity sensor dan kemudian akan menampilkan hasilnya berupa tampilan pada LCD dan servo. Dalam pembuatan alat ini, penulis menggunakan Arduino UNO sebagai alat pemrosesnya.
Catu Daya (Input) Arduino UNO (Proses) LCD 16x2 (Output) Inductive Proximity Sensor (Input) Motor servo (Output) Capasitive Proximity Sensor (Input)
3. Output
Output merupakan hasil akhir dari masukan yang sudah diproses. Dalam pembutan alat ini penulis menggunakan motor servo dan LCD 16x2 sebagai output dari proses yang telah dilakukan.
3.3.Skema Rangkaian Alat
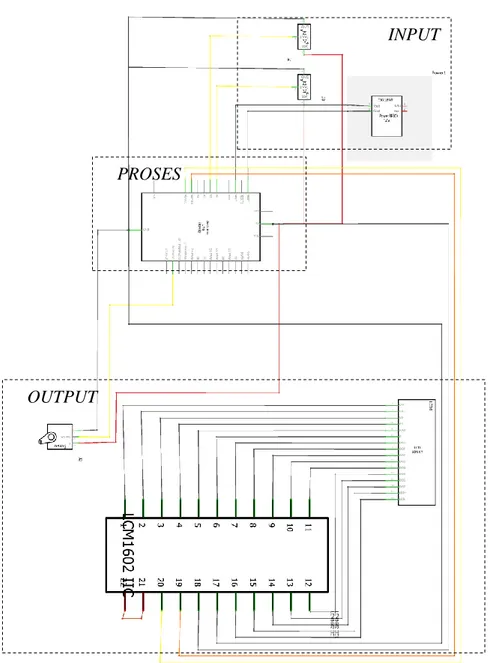
Gambar III.2
Skema Rangkaian Alat Pemilah Sampah Cerdas Otomatis Berbasis Arduino UNO
INPUT
PROSES
Skema rangkaian alat ini terdiri dari rangkaian input, proses, dan output. Rangkaian input dalam alat ini terdiri dari catu daya berupa adaptor 12V dan sensor proximity yang mendeteksi jenis sampah logam dan non-logam. Proses dalam rangkaian alat ini menggunakan Arduino UNO, yaitu dengan mengolah hasil data dari sensor proximity. Sedangkan untuk rangkaian output dalam alat ini berupa tampilan hasil proses dengan menggunakan LCD 16x2 dan motor servo sebagai penggerak untuk mengarahkan sampah ke wadah sampah sesuai jenisnya.
3.4.Cara Kerja Alat
Cara kerja alat ini adalah ketika Arduino UNO diberi tegangan 12V. Selanjutnya sensor proximity akan mendeteksi jenis sampah yang masuk. Setelah sensor mendeteksi jenis sampah yang masuk, kemudian sensor akan mengirimkan data ke Arduino UNO untuk diproses dan diolah sesuai dengan program yang telah dimasukkan. Setelah hasil dari proses telah diketahui, Arduino UNO akan mengirimkan hasil berupa tampilan ke LCD 16x2 dan motor servo akan menggerakkan objek sampah ke tempat sampah sesuai jenisnya.
1. Catu Daya
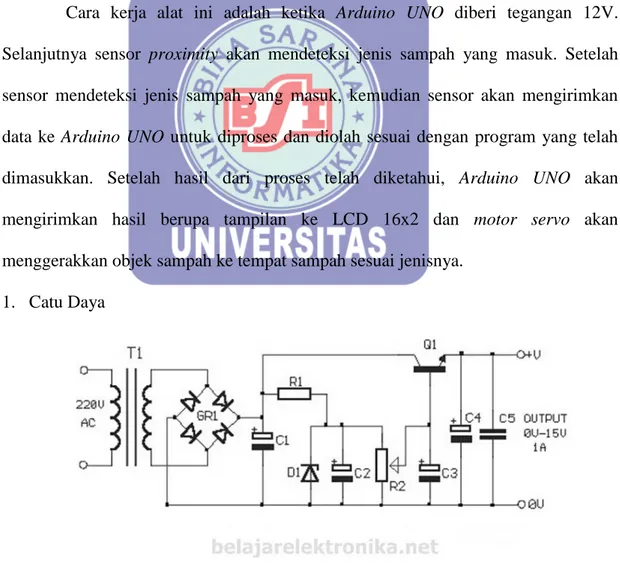
Gambar III.3 Skema Catu Daya 12V 1A
Dalam pembuatan alat ini penulis menggunakan catu daya berupa adaptor 12V 1A. Adaptor dihubungkan dengan aliran listrik 220V dan disambungkan dengan Board Arduino UNO melalui power jack 2.1mm yang ada pada Arduino UNO. 2. Sensor Proximity
Gambar III.4
Skema Rangkaian Proximity Sensor
Cara kerja dari sensor ini adalah dengan mendeteksi jenis logam maupun non-logam dengan mendekatkan objek kearah sensor. Sensor akan mengirimkan masukan data berupa angka biner 0 (LOW) dan 1 (HIGH) yang ditandai dengan nyala atau tidak lampu LED yang ada pada sensor yang kemudian data akan dikirimkan ke pemroses dalam hal ini Arduino UNO.
Dalam pemasangan pada rangkaian, kabel coklat dihubungkan pada VCC, kabel biru dihubngkan dengan Ground.dan kabel hitam dihubungkan dengan pin 8 digital pada arduino sebagai input.
3. Pengendali / Arduino UNO
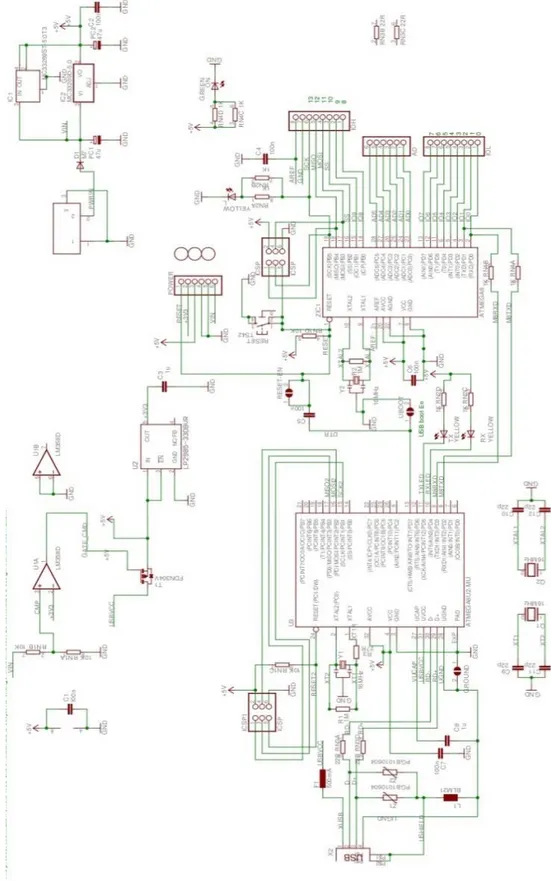
Gambar III.5
Arduino UNO R3 berfungsi sebagai pengontrol untuk semua sistem. Arduino
UNO akan memberikan instruksi kepada output ketika Arduino UNO menerima
masukan data yang dikirim dari sensor proximity. Masukan tersebut kemudian akan diporses oleh Arduino UNO yang selanjutnya instruksi akan diberikan kepada perangkat output yang berupa LCD sebagai indikator dan servo sebagai pendorong sampah menuju tempat yang sesuai denga jenisnya.
4. Rangkaian Output
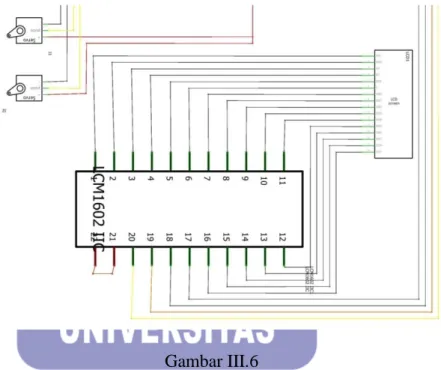
Gambar III.6 Skema Rangkaian Output
Ketika data jenis benda yang diperoleh dari sensor proximity, selanjutnya sensor akan mengirimkan data digital kepada Arduino UNO dan Arduino UNOakan memproses data tersebut yang kemudian data akan diteruskan ke perangkat output yaitu LCD 16x2 akan menampilkan indkator jenis benda yang terdeteksi dan servo yang akan meneruskan benda ke tempat sampah sesuai dengan jenisnya.
3.5.Flowchart Program
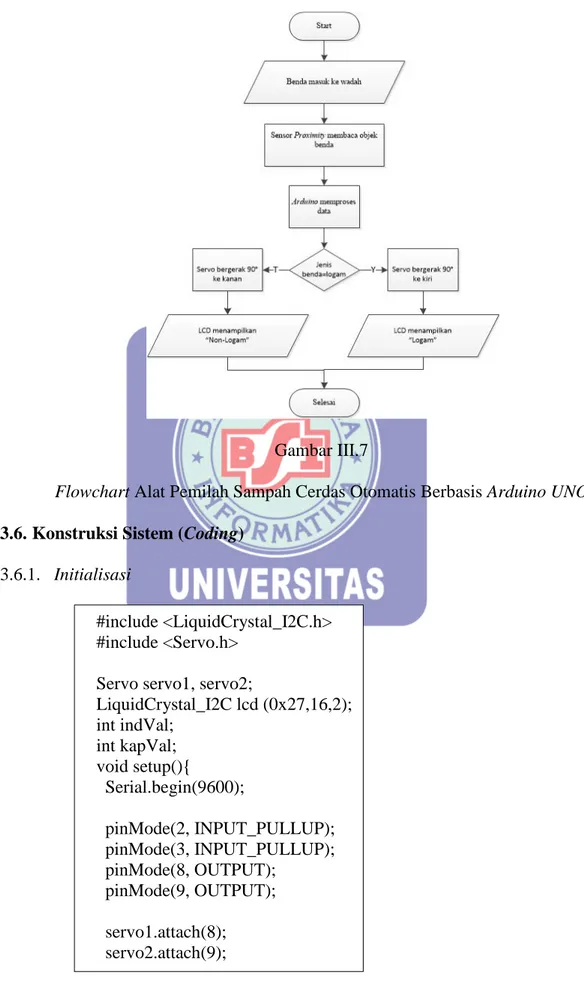
Gambar III.7
Flowchart Alat Pemilah Sampah Cerdas Otomatis Berbasis Arduino UNO 3.6.Konstruksi Sistem (Coding)
3.6.1. Initialisasi
#include <LiquidCrystal_I2C.h> #include <Servo.h>
Servo servo1, servo2;
LiquidCrystal_I2C lcd (0x27,16,2); int indVal; int kapVal; void setup(){ Serial.begin(9600); pinMode(2, INPUT_PULLUP); pinMode(3, INPUT_PULLUP); pinMode(8, OUTPUT); pinMode(9, OUTPUT); servo1.attach(8); servo2.attach(9);
Penjelasan :
Sintaks program diatas merupakan inisialisasi library dari komponen yang digunakan dalam pembuatan alat ini dan inisialisasi variable yang digunakan pada program, serta inisialisasi dan pengaturan pin yang digunakan pada Board Arduino UNO.
3.6.2. Input
Penjelasan:
Sintaks diatas merupakan script untuk pembacaan data dari sensor, yaitu pembacaan secara digital.
3.6.3. Main Program
Penjelasan:
Sintaks program diatas digunakan sebagai program utama yaitu pengolahan data yang diberikan oleh sensor. Dalam hal ini data berupa data digital HIGH dan LOW.
indVal = digitalRead(2); kapVal = digitalRead(3); delay(3000);
if (indVal == LOW && kapVal == HIGH) { Serial.println("Sampah Logam");
lcd.println("Sampah Logam"); servo1.write(0);
delay(2000); servo1.write(90);
3.6.4. Output
Penjelasan:
Sintaks program diatas merupakan perintah untuk menjalankan komponen output dari data yang diperoleh dari sensor dan sudah diolah / diproses oleh Arduino UNO. Dalam rangkaian alat ini output berupa LCD yang akan menampilkan keterangan jenis sampah dan servo akan melakukan pergerakan sesuai dengan perintah yang ada pada main program.
lcd.println("Sampah Logam"); servo1.write(0);
delay(2000); servo1.write(90);
3.7.Hasil Percobaan
3.7.1. Hasil Percobaan Input
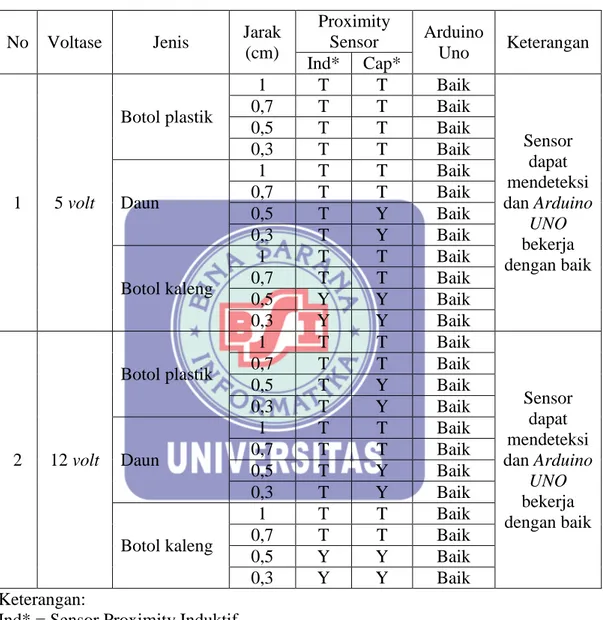
Tabel III.1 Hasil Percobaan Input No Voltase Jenis Jarak
(cm) Proximity Sensor Arduino Uno Keterangan Ind* Cap* 1 5 volt Botol plastik 1 T T Baik Sensor dapat mendeteksi dan Arduino UNO bekerja dengan baik 0,7 T T Baik 0,5 T T Baik 0,3 T T Baik Daun 1 T T Baik 0,7 T T Baik 0,5 T Y Baik 0,3 T Y Baik Botol kaleng 1 T T Baik 0,7 T T Baik 0,5 Y Y Baik 0,3 Y Y Baik 2 12 volt Botol plastik 1 T T Baik Sensor dapat mendeteksi dan Arduino UNO bekerja dengan baik 0,7 T T Baik 0,5 T Y Baik 0,3 T Y Baik Daun 1 T T Baik 0,7 T T Baik 0,5 T Y Baik 0,3 T Y Baik Botol kaleng 1 T T Baik 0,7 T T Baik 0,5 Y Y Baik 0,3 Y Y Baik Keterangan:
Ind* = Sensor Proximity Induktif Cap* = Sensor Proximity Capasitif T = Sensor tidak mendeteksi benda Y = Sensor mendeteksi benda
Dari hasil tabel pengujian diatas dapat dilihat bahwa jarak sensitivitas dari sensor adalah pada jarak maksimal 0,5 cm. Sensor dapat mendeteksi benda antara 0 cm sampai dengan 0,5 cm dan dapat bekerja dengan baik sesuai kode program yang dirancang. Tetapi sensor tidak dapat mendeteksi jenis bahan plastik.
3.7.2. Hasil Percobaan Output
Tabel III.2 Hasil Percobaan Output
No Voltase Jenis LCD Servo Keterangan
1 5 volt Botol plastik Tidak menampil kan Tidak bergerak LCD dan Servo bekerja dengan baik
Daun Baik Baik
Botol kaleng Baik Baik
2 12 volt Botol plastik Tidak menampil kan Tidak bergerak LCD dan Servo bekerja dengan baik
Daun Baik Baik
Botol kaleng Baik Baik
Dari hasil pengujian diatas, komponen output dapat bekerja dengan baik sesuai dengan kode program. LCD menampilkan indikator sesuai dengan kode program yang telah dirancang dan servo berjalan dengan baik sesuai dengan kode program, yaitu akan bergerak 90° ke kiri jika sensor mendeteksi benda logam dan akan bergerak 90° ke kanan jika sensor mendeteksi benda non-logam.
3.7.3. Hasil Percobaan Keseluruhan Alat Tabel III.3
Hasil Percobaan Keseluruhan Alat No Voltase Jenis Jarak
(cm)
Proximity
Sensor Arduino
Uno LCD Servo Ket
Ind* Cap*
1 5 volt
Botol plastik
1 T T Baik Baik Baik
Sensor, Arduino UNO, LCD, Servo bekerja dengan baik
0,7 T T Baik Baik Baik
0,5 T T Baik Baik Baik
0,3 T T Baik Baik Baik
Daun
1 T T Baik Baik Baik
0,7 T T Baik Baik Baik
0,5 T Y Baik Baik Baik
Botol kaleng
1 T T Baik Baik Baik
0,7 T T Baik Baik Baik
0,5 Y Y Baik Baik Baik
0,3 Y Y Baik Baik Baik
2 12 volt
Botol plastik
1 T T Baik Baik Baik
Sensor, Arduino UNO, LCD, Servo bekerja dengan baik
0,7 T T Baik Baik Baik
0,5 T T Baik Baik Baik
0,3 T T Baik Baik Baik
Daun
1 T T Baik Baik Baik
0,7 T T Baik Baik Baik
0,5 T Y Baik Baik Baik
0,3 T Y Baik Baik Baik
Botol kaleng
1 T T Baik Baik Baik
0,7 T T Baik Baik Baik
0,5 Y Y Baik Baik Baik
0,3 Y Y Baik Baik Baik
Keterangan:
Ind* = Sensor Proximity Induktif Cap* = Sensor Proximity Capasitif T = Sensor tidak mendeteksi benda Y = Sensor mendeteksi benda
Dari hasil pengujian yang dapat dilihat pada tabel diatas dapat disimpulkan bahwa sensor, Arduino UNO, LCD, dan motor servo dapat bekerja baik pada input daya 5V maupun 12V. Sensor dapat mendeteksi jenis benda dengan maksimal jarak benda dengan sensor adalah 0,5 cm. LCD dapat menampilkan indikator jenis sampah sesuai dengan kode program. Servo berjalan sesuai dengan kode program yang dirancang. Tetapi, Sensor tidak dapat mendeteksi benda dengan jenis bahan plastik.