BAB III
PERANCANGAN SISTEM
Pada bab ini penulis menjelaskan mengenai perancangan perangkat keras beserta perangkat lunak dan realisasi kandang pintar berbasis arduino untuk anjing Golden Retriever.
3.1. Gambaran Alat
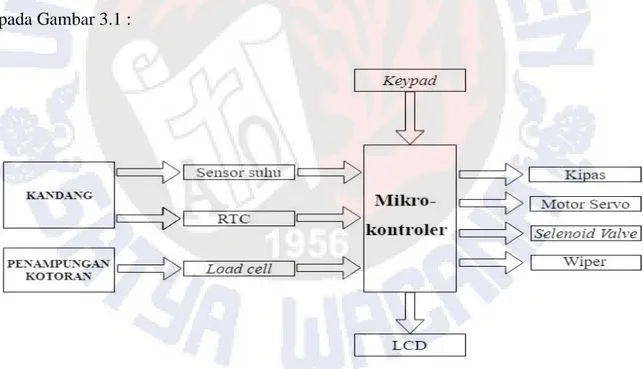
Sistem yang dirancang untuk tugas akhir ini adalah kandang anjing yang dirancang khusus untuk anjing Golden Retriever dengan memperhatikan suhu ruangan, kebersihan, dan kebutuhan makanan dan minuman. Sumber energi yang digunakan adalah energi listrik dari PLN dan baterai 12V/7Ah sebagai energi cadangan. Alat ini menggunakan mikrokontroler arduino mega 2560 untuk mengolah data yang didapat dari sensor-sensor yang digunakan. Berikut adalah diagram blok dari sistem yang ditampilkan pada Gambar 3.1 :
Gambar 3.1. Blok Diagram Sistem.
Alat ini memungkinkan penggunanya/pemilik anjing untuk meninggalkan anjing peliharaannya dalam beberapa waktu dengan persediaan pangan dan minum yang cukup. Ketika sistem dijalankan, arduino yang digunakan akan membaca waktu dari
Kemudian pengguna dapat melakukan pengaturan waktu makan menggunakan keypad sesuai dengan kebutuhan anjing yang dipelihara. Ketika selesai melakukan pengaturan dan pengguna memilih simpan, sistem akan mulai bekerja.
Pada saat waktu menunjukkan waktu makan yang sebelumnya telah ditentukan, katup yang diletakkan pada wadah penyedia pakan akan terbuka dan memindahkan makanan ke mangkok makan anjing dalam jumlah tertentu. Dalam beberapa waktu anjing yang dipelihara akan mengeluarkan kotoran yang kemudian masuk ke dalam wadah penampungan. Jika berat kotoran dalam wadah penampungan mencapai berat tertentu yang telah ditentukan oleh penulis, wiper akan bekerja mendorong kotoran tersebut ke penampungan lain yang nantinya akan dibersihkan oleh pemilik anjing. Kemudian sistem akan memindai suhu di sekitar kandang anjing menggunakan sensor suhu. Jika suhu ruangan di sekitar kandang anjing melebihi batas maksimal yang sudah ditentukan maka kipas yang digunakan sebagai pendingin akan menyala sampai suhu berada di bawah batas maksimal yang sudah ditentukan.
Perangkat ini menggunakan Power Supply sebagai catu dayanya, kemudian ditambah dengan baterai untuk menjadi catu daya cadangan ketika listrik dari PLN terputus, sehingga perangkat ini akan tetap dapat bekerja ketika listrik terputus/padam.
3.2. Perancangan Perangkat Keras
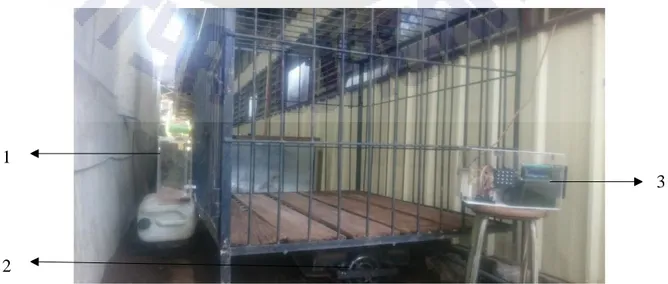
Realisasi perancangan perangkat keras yang ditunjukan pada Gambar 3.2 dibawah ini, menunjukan bahwa alat ini memiliki beberapa perangkat keras pendukung seperti box perangkat elektronik, wadah penampungan kotoran dan wiper pembersih, wadah penyimpan makanan dan minuman yang akan di jelaskan pada bagian ini.
Gambar 3.2. Realisasi Perancangan Alat 1
3
Keterangan :
1. Wadah penyimpan makanan dan minuman 2. Wadah penampungan kotoran
3. Box perangkat elektronik
3.2.1.Box Perangkat Elektronik
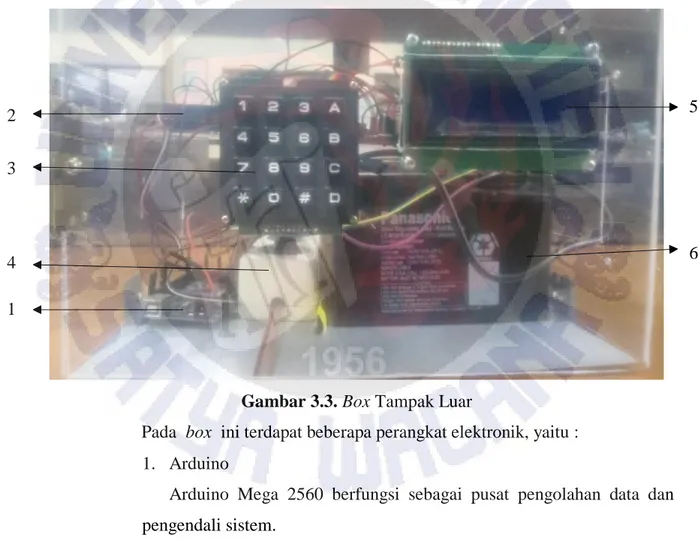
Box alat dengan ukuran 30cm × 19cm × 20cm berfungsi sebagai tempat penyimpanan perangkat elektronik yang bertujuan agar perangkat elektronik yang digunakan terhindar dari air. Di bagian depan box terdapat keypad yang berfungsi untuk menginput jam makan yang diatur oleh pemilik anjing peliharaan dan LCD yang menampilkan waktu, tanggal dan suhu ruangan di sekitar kandang.
Gambar 3.3. Box Tampak Luar
Pada box ini terdapat beberapa perangkat elektronik, yaitu : 1. Arduino
Arduino Mega 2560 berfungsi sebagai pusat pengolahan data dan pengendali sistem.
2. Modul Relay
Modul realy berfungsi sebagai saklar.
2 5 3 4 1 6
3. Keypad
Keypad digunakan untuk memasukan waktu makan dan memilih usia anjing yang dipelihara.
4. Stop Kontak
Terdapat stop kontak sebagai sumber tegangan AC. 5. LCD display
LCD display berfungsi sebagai penampil utama yang menampilkan waktu dan suhu ruangan.
6. Baterai 12V
Baterai 12V sebagai sumber daya cadangan yang dapat digunakan ketika listrik dari PLN terputus.
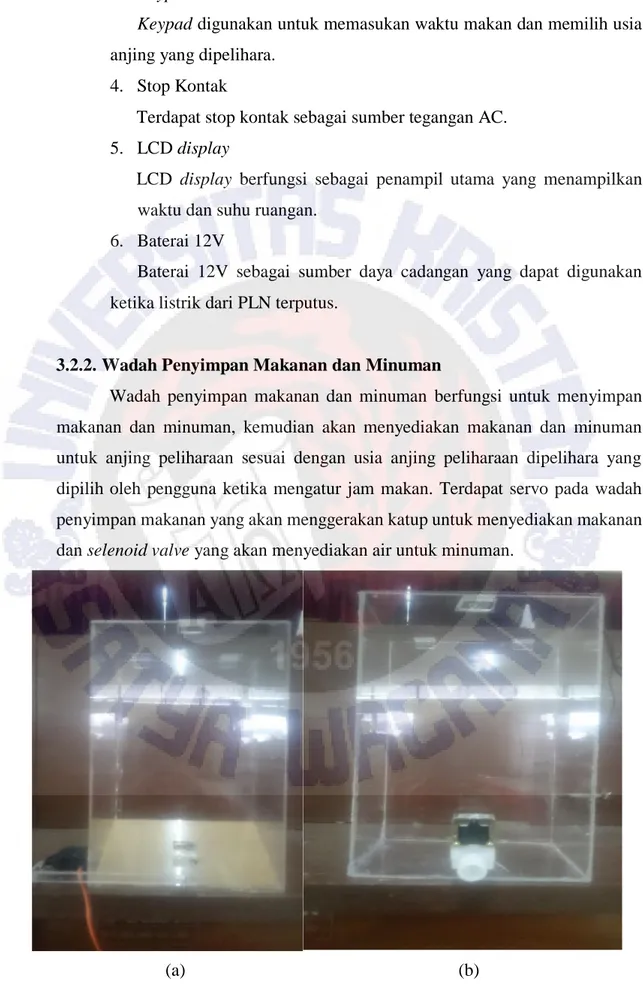
3.2.2.Wadah Penyimpan Makanan dan Minuman
Wadah penyimpan makanan dan minuman berfungsi untuk menyimpan makanan dan minuman, kemudian akan menyediakan makanan dan minuman untuk anjing peliharaan sesuai dengan usia anjing peliharaan dipelihara yang dipilih oleh pengguna ketika mengatur jam makan. Terdapat servo pada wadah penyimpan makanan yang akan menggerakan katup untuk menyediakan makanan dan selenoid valve yang akan menyediakan air untuk minuman.
(a) (b)
(a) (b)
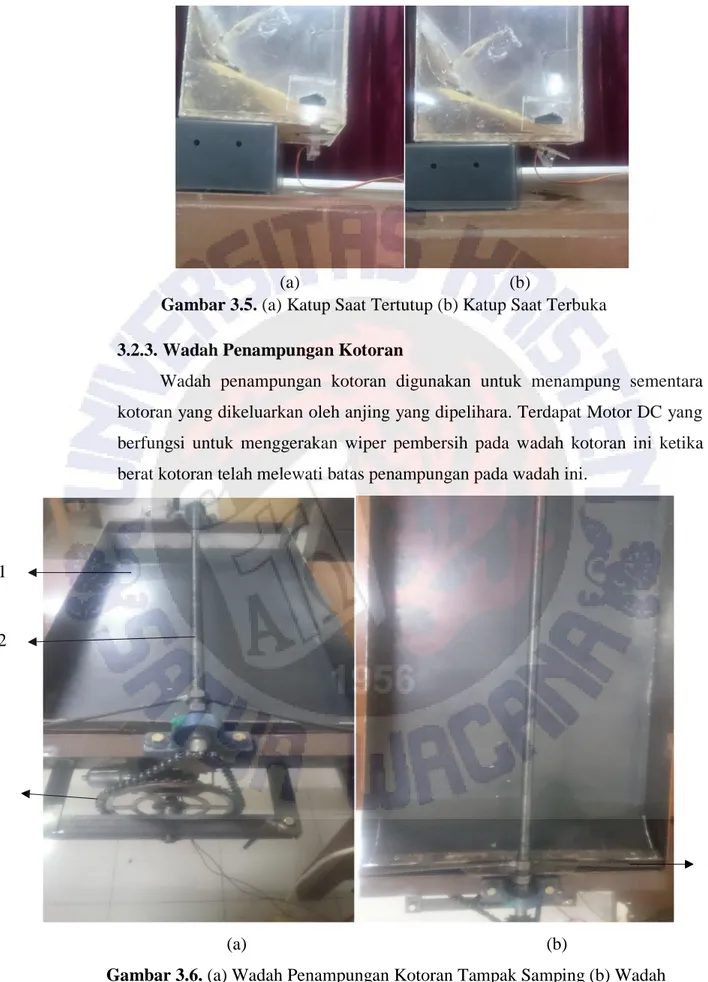
Gambar 3.5. (a) Katup Saat Tertutup (b) Katup Saat Terbuka 3.2.3.Wadah Penampungan Kotoran
Wadah penampungan kotoran digunakan untuk menampung sementara kotoran yang dikeluarkan oleh anjing yang dipelihara. Terdapat Motor DC yang berfungsi untuk menggerakan wiper pembersih pada wadah kotoran ini ketika berat kotoran telah melewati batas penampungan pada wadah ini.
(a) (b)
Gambar 3.6. (a) Wadah Penampungan Kotoran Tampak Samping (b) Wadah Penampungan Kotoran Tampak Atas
1
2
4 3
Keterangan :
1. Wadah penampung 2. Jalur Wiper
3. Motor DC Power Window 4. Wiper
3.3. Perancangan Elektronika
Pada bagian ini akan dijelaskan mengenai perancangan elektronika yang digunakan dalam sistem yang akan dibuat. Perancangan elektronika dalam pembuatan skripsi ini terdiri dari bagian-bagian utama sebagai berikut:
1. Arduino mega 2560. 2. Supply.
3. Load Cell.
4. Sensor suhu Thermocouple dan kipas DC. 5. Real Time Clock (RTC).
6. Baterai 12V/7A. 3.3.1Pengendali Utama
Pengendali Utama untuk sistem alat menggunakan Arduino mega 2560 sebagai pengendali utama pada sistem alat. Tugas dari mikrokontroler antara lain:
❖ Mengolah data yang didapat dari sensor suhu, load cell dan RTC. ❖ Menyimpan data waktu makan yang diinput menggunakan keypad. ❖ Mengalihkan data suhu dan waktu ke LCD.
❖ Memberikan sinyal on/off ke relay.
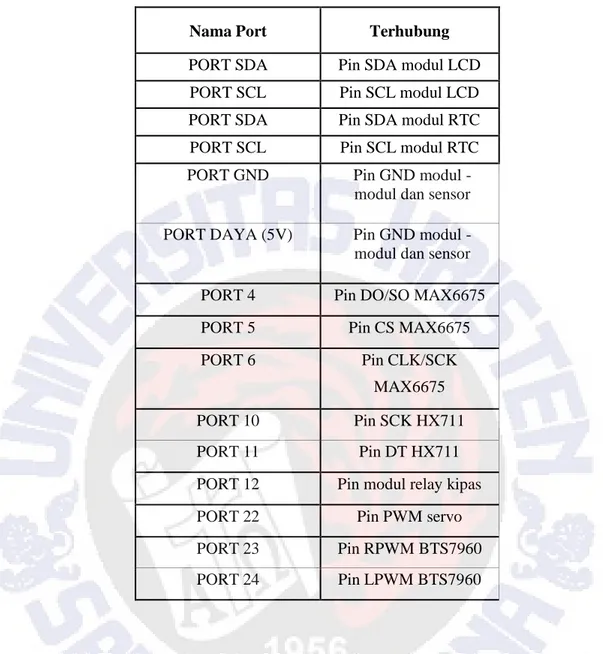
Tabel 3.1 Konfigurasi Pin Mikrokontroler Arduino Mega 2560 yang Digunakan Nama Port Terhubung
PORT SDA Pin SDA modul LCD
PORT SCL Pin SCL modul LCD
PORT SDA Pin SDA modul RTC
PORT SCL Pin SCL modul RTC
PORT GND Pin GND modul -
modul dan sensor
PORT DAYA (5V) Pin GND modul -
modul dan sensor
PORT 4 Pin DO/SO MAX6675
PORT 5 Pin CS MAX6675
PORT 6 Pin CLK/SCK
MAX6675
PORT 10 Pin SCK HX711
PORT 11 Pin DT HX711
PORT 12 Pin modul relay kipas
PORT 22 Pin PWM servo
PORT 23 Pin RPWM BTS7960
PORT 24 Pin LPWM BTS7960
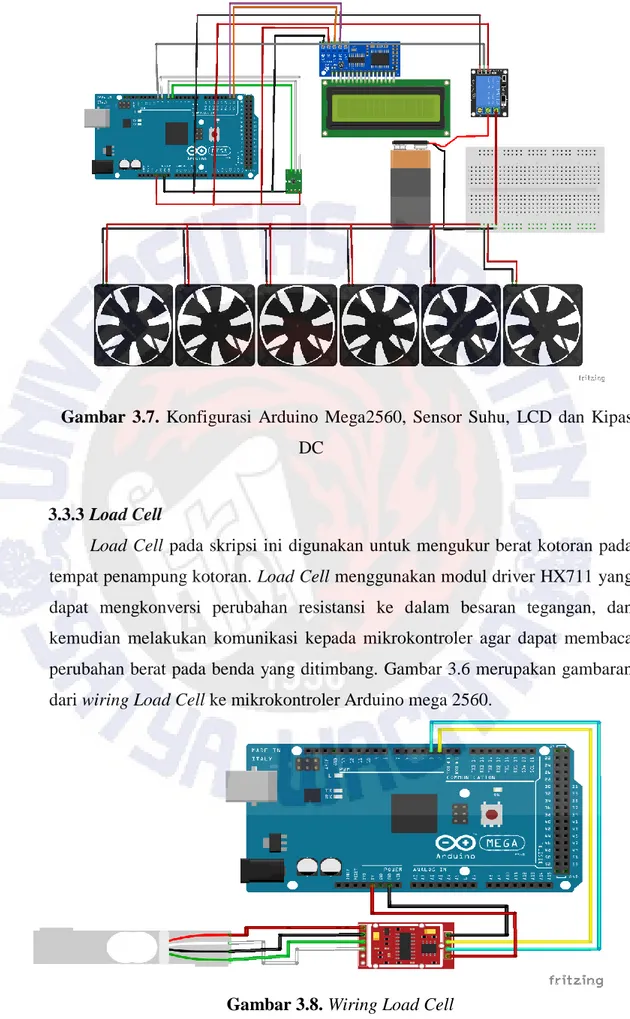
3.3.2Konfigurasi Arduino Mega2560, Sensor Suhu, LCD dan Kipas DC Suhu ruangan yang didapat dari hasil scan sensor suhu dikirimkan ke Arduino dan ditampilkan melalui LCD. Kemudian Arduino mengirimkan sinyal yang akan menyalakan kipas DC ketika suhu ruangan mencapai titik maksimal yang sudah ditentukan.
Gambar 3.7. Konfigurasi Arduino Mega2560, Sensor Suhu, LCD dan Kipas
DC
3.3.3Load Cell
Load Cell pada skripsi ini digunakan untuk mengukur berat kotoran pada tempat penampung kotoran. Load Cell menggunakan modul driver HX711 yang dapat mengkonversi perubahan resistansi ke dalam besaran tegangan, dan kemudian melakukan komunikasi kepada mikrokontroler agar dapat membaca perubahan berat pada benda yang ditimbang. Gambar 3.6 merupakan gambaran dari wiring Load Cell ke mikrokontroler Arduino mega 2560.
Gambar 3.8. Wiring Load Cell
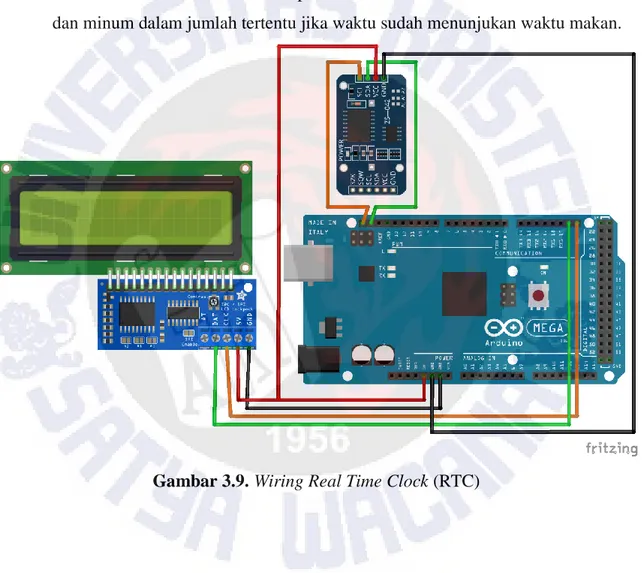
3.3.4Real Time Clock (RTC)
Modul DS3231 real time clock (RTC) merupakan salah jenis modul yang berfungsi sebagai pewaktuan digital. Interface atau antar muka untuk mengakses modul ini yaitu menggunakan i2c atau two wire (SDA dan SCL). Sehingga apabila diakses menggunakan mikrokontroler misal arduino uno, membutuhkan 2 pin SDA dan SCL dan 2 pin power[7]. Modul RTC ini digunakan untuk menunjukan waktu dan kemudian mengirimkan sinyal pada servo yang akan membuka penutup wadah makan dan selenoid valve pada wadah minum kemudian memberi makan dan minum dalam jumlah tertentu jika waktu sudah menunjukan waktu makan.
Gambar 3.9. Wiring Real Time Clock (RTC)
3.4. Perancangan Perangkat Lunak
Pada bagian ini dijelaskan mengenai perancangan perangkat lunak. Perancangan perangkat lunak yang dijelaskan adalah perangkat lunak mikrokontroler Arduino mega2560 serta pengolahan data dari sensor suhu, Load Cell dan RTC.
3.4.1Program Mikrokontroler Arduino Mega2560
Mikrokontroler Arduino mega 2560 diprogram agar bekerja sebagai pengendali sistem yang berfungsi melakukan komunikasi dengan sensor suhu, Load Cell, dan RTC untuk membaca data dan mengirimkan sinyal untuk menyalakan kipad DC, motor DC power window, servo dan selenoid valve ketika kondisi telah terpenuhi.
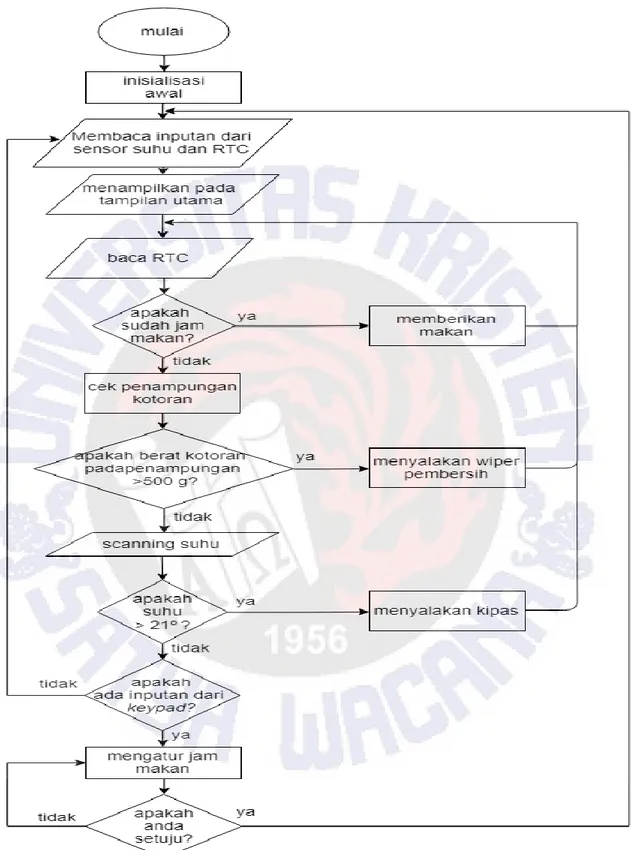
Program dimulai dengan inisialisasi variabel – variabel Kemudian mikrokontroler membaca nilai sensor suhu, dan waktu dari RTC lalu menampilkan nilai dari sensor suhu dan RTC pada LCD.
Pada saat waktu menunjukkan waktu makan yang sebelumnya telah ditentukan, katup yang diletakkan pada wadah penyedia pakan akan terbuka dan memindahkan makanan ke mangkok makan anjing dalam jumlah tertentu. Kemudian mikrokontroler akan membaca berat wadah penampungan kotoran melalui Load Cell. Jika berat kotoran dalam wadah penampungan mencapai berat tertentu yang telah ditentukan, wiper akan bekerja mendorong kotoran tersebut ke penampungan lain yang nantinya akan dibersihkan oleh pemilik anjing. Kemudian sistem akan memindai suhu disekitar kandang anjing menggunakan sensor suhu. Jika suhu ruangan di sekitar kandang anjing melebihi batas maksimal yang sudah ditentukan maka kipas yang digunakan sebagai pendingin akan menyala sampai suhu berada di bawah batas maksimal yang sudah ditentukan.
Berikut adalah diagram alir sistem yang ditunjukkan Gambar 3.8 :
Gambar 3.10. Diagram Alir Sistem Kandang Pintar Berbasis Arduino untuk Anjing Golden Retriever