Dasar Sistem Kendali BAB II
Teks penuh
Gambar
Garis besar
Dokumen terkait
Metode ini dapat dipakai untuk memperkirakan beban puncak yang akan terjadi di Sistem Tenaga Listrik untuk beberapa tahun yang akan datang, seperti terlihat pada gambar
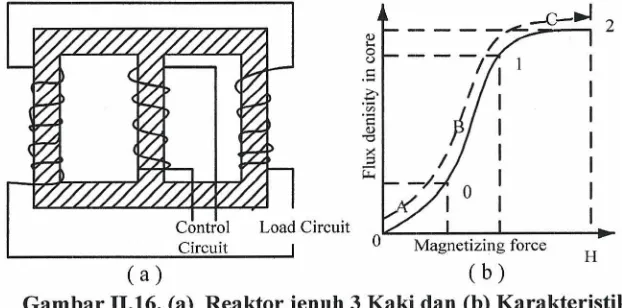
Sesuai dengan hukum Lenz, arah dari arus ini (seperti yang ditunjukkan pada Gambar 2.27) adalah sedemikian rupa sehingga medan magnet yang dihasilkan melawan
Dari diagram blok pengendalian sistem yang terdapat pada Gambar 2, terlihat variabel masukan bagi pengendali fuzzy adalah error (e) dan beda error (de) yang terbaca oleh sensor
Gambar 4.8 Model 12 dikendalikan oleh pengendali R-S-T model 6 45 Gambar 4.9 Model 12 dikendalikan oleh pengendali R-S-T model 12 46 Gambar 4.10 Pengendalian model 0 47
Dalam gambar ini tampak bahwa respon sistem pengendali suhu pada prototype inkubator bekerja cukup baik, yang ditunjukkan dengan kembalinya suhu inkubator pada
Hasil simulasi yang diperlihatkan pada Tabel 2 s/d Tabel 4 memperlihatkan bahwa tanggapan tegangan sistem eksitasi generator tipe arus searah tanpa pengendali
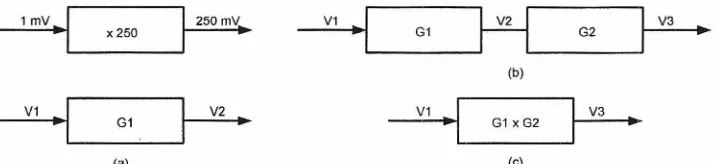
Rangkaian dasar penguat inverting adalah seperti yang ditunjukkan pada gambar 1, dimana sinyal masukannya dibuat melalui input inverting.. Seperti tersirat pada
Hasil simulasi yang diperlihatkan pada Tabel 2 s/d Tabel 4 memperlihatkan bahwa tanggapan tegangan sistem eksitasi generator tipe arus searah tanpa pengendali
