6
BAB II DASAR TEORI
2.1 Proteksi Sistem Tenaga
Proteksi sistem tenaga merupakan skema proteksi dalam sistem tenaga yang dirancang untuk terus memantau sistem daya untuk memastikan kontinuitas maksimum pasokan listrik dengan kerusakan minimum terhadap peralatan listrik, dan properti. Sementara merancang skema proteksi, kita harus memahami karakteristik kesalahan dari elemen sistem tenaga listrik. Kita juga harus memiliki pengetahuan tentang karakteristik awal dari berbagai relay proteksi.
Desain harus memastikan bahwa relay akan mendeteksi kondisi yang tidak diinginkan dan kemudian memutus area yang terkena dampak gangguan tetapi tetap terkendali setiap saat. Namun, ada bukti statistik bahwa sejumlah besar kesalahan relay proteksi disebabkan oleh pengaturan yang tidak tepat atau tidak memadai antara relay proteksi dengan beban yang ditangani. Mengingat kemungkinan konsekuensi semacam itu, relay protektif dimaksudkan untuk mengurangi dampak kesalahan dari arus shunt.
Seperti yang telah dijelaskan, efek paling jelas dari kesalahan shunt adalah peningkatan arus yang tiba-tiba. Oleh karena itu, wajar jika besarnya arus digunakan sebagai indikasi positif adanya kesalahan dan tidak mengherankan bahwa proteksi arus berlebih adalah bentuk proteksi yang paling banyak digunakan.
Dalam banyak situasi, itu mungkin satu-satunya proteksi yang disediakan. Jenis proteksi yang hanya bergantung pada besarnya arus tanpa mengambil sudut fasa yang diketahui dikenal sebagai proteksi arus berlebih non-directional.
Namun, seringkali diperlukan untuk membedakan antara kesalahan di depan pemutus dan kesalahan di belakang pemutus. Ini dimungkinkan hanya jika kita memperhitungkan tidak hanya besarnya arus tetapi juga fasanya sehubungan dengan tegangan di lokasi relay. Dalam kasus seperti itu, proteksi tersebut dikenal sebagai directional over-current protection dimana proteksi arus lebih directional memberi selektivitas lebih besar daripada proteksi arus lebih non-directional.
Kita tidak boleh lupa bahwa jenis proteksi apa pun baik directional maupun non directional adalah konsep utama dalam sistem proteksi tenaga listrik. Dengan demikian kita dapat menggolongkan relay arus lebih sebagai proteksi non- directional yang memberikan proteksi arus berlebih non-terarah. Namun secara historis, sekring telah mendahului relay arus berlebih untuk menyediakan proteksi arus berlebih non-directional. Oleh karena itu, pada penelitian kali ini sekring dan relay termal juga akan dibahas sebagai salah satu sistem proteksi arus lebih non- directional yang akan dibandingkan dengan rancangan Over Current Relay pada penelitian ini.
7
2.2 Sekring
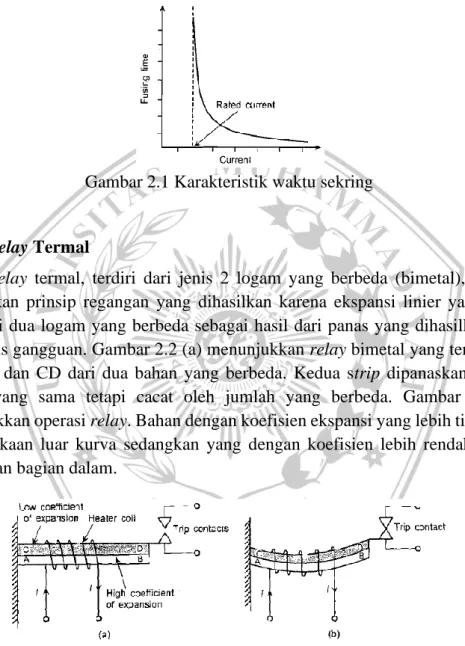
Sekring adalah alat pelindung tertua yang bertahan dari awal era listrik hingga saat ini. Ini dapat dikaitkan dengan kehandalan, harga yang ekonomis, dan kesederhanaan kerja mereka. Sekring memungkinkan arus normal mengalir tetapi melebur ketika arus berlebih. Karakteristik jumlah arus yang mengalir berbanding terbalik dengan waktu arus. Gambar 2.1 menunjukkan karakteristik sekring.
Gambar 2.1 Karakteristik waktu sekring
2.3 Relay Termal
Relay termal, terdiri dari jenis 2 logam yang berbeda (bimetal), bekerja berdasarkan prinsip regangan yang dihasilkan karena ekspansi linier yang tidak sama dari dua logam yang berbeda sebagai hasil dari panas yang dihasilkan oleh aliran arus gangguan. Gambar 2.2 (a) menunjukkan relay bimetal yang terdiri dari strip AB dan CD dari dua bahan yang berbeda. Kedua strip dipanaskan dengan jumlah yang sama tetapi cacat oleh jumlah yang berbeda. Gambar 2.2 (b) menunjukkan operasi relay. Bahan dengan koefisien ekspansi yang lebih tinggi ada di permukaan luar kurva sedangkan yang dengan koefisien lebih rendah ada di permukaan bagian dalam.
Gambar 2.2 Relay Berjenis Bimetal 2.4 Relay Arus Lebih
Relay arus berlebih (OCR) memiliki satu input berupa arus AC. Output dari relay merupakan kontak yang biasa berada dalam keadaan terrtutp akan berubah menjadi terbuka pada saat relay trip. Pengaturan relay memiliki dua jenis yaitu, pengaturan waktu dan pengaturan nilai arus trip. Pengaturan waktu menentukan
8
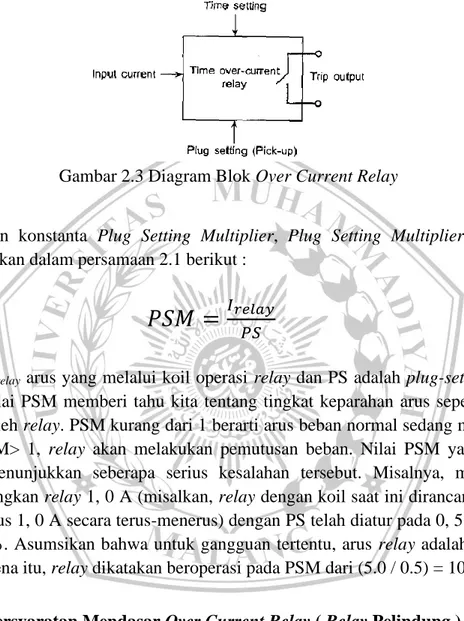
waktu pengoperasian relay sementara pengaturan arus trip menentukan batas arus maksimum yang dapat melalui. Pengaturan arus trip awalnya berasal dari relay proteksi berjenis elektromekanikal. Dalam relay ini, kita memiliki input setting waktu trip, input setting arus trip (Plug Setting), dan konstanta Plug Setting Multiplier yang dijabarkan melalui Gambar 2.3.
Gambar 2.3 Diagram Blok Over Current Relay
Persamaan konstanta Plug Setting Multiplier, Plug Setting Multiplier (PSM), didefinisikan dalam persamaan 2.1 berikut :
𝑃𝑆𝑀 =
𝐼𝑟𝑒𝑙𝑎𝑦𝑃𝑆 (2.1)
dimana Irelay arus yang melalui koil operasi relay dan PS adalah plug-setting dari relay. Nilai PSM memberi tahu kita tentang tingkat keparahan arus seperti yang terlihat oleh relay. PSM kurang dari 1 berarti arus beban normal sedang mengalir.
Pada PSM> 1, relay akan melakukan pemutusan beban. Nilai PSM yang lebih tinggi menunjukkan seberapa serius kesalahan tersebut. Misalnya, mari kita pertimbangkan relay 1, 0 A (misalkan, relay dengan koil saat ini dirancang untuk dilalui arus 1, 0 A secara terus-menerus) dengan PS telah diatur pada 0, 5 A, yaitu pada 50%. Asumsikan bahwa untuk gangguan tertentu, arus relay adalah 5, 0 A.
Oleh karena itu, relay dikatakan beroperasi pada PSM dari (5.0 / 0.5) = 10, 0.
2.4.1 Persyaratan Mendasar Over Current Relay ( Relay Pelindung )
Persyaratan mendasar dari Over Current Relay ( Relay Pelindung ) untuk mendeteksi kesalahan dan memicu pemutus sirkuit ditunjukkan di bawah ini:
• Selektivitas:
Ini adalah kemampuan Over Current Relay ( Relay Pelindung ) untuk memilih lokasi yang tepat dari sistem yang terganggu dan melepaskannya tanpa mempengaruhi bagian lain dari sistem.
• Kecepatan:
Pemutusan bagian yang salah menggunakan Over Current Relay ( Relay Pelindung ) harus secepat mungkin. Jika tidak, peralatan listrik dapat rusak,
9
tegangan sistem dapat berkurang, dan satu jenis kesalahan dapat berkembang menjadi jenis kesalahan lainnya.
• Sensitivitas:
Nilai minimum kuantitas penggerak yang diperlukan untuk mengoperasikan sistem Over Current Relay ( Relay Pelindung ).
• Kehandalan:
Ini adalah kemampuan sistem Over Current Relay ( Relay Pelindung ) untuk beroperasi di bawah kondisi yang telah ditentukan.
• Kesederhanaan:
Pemeliharaan sistem Over Current Relay ( Relay Pelindung ) harus sederhana.
• Ekonomi:
Secara ekonomis, jenis sistem Over Current Relay ( Relay Pelindung ) tertentu harus dipilih.
2.4.2 Prinsip Operasi Over Current Relay ( Relay Pelindung )
Over Current Relay ( Relay Pelindung ) yang paling umum digunakan dalam sistem tenaga adalah relay tipe elektro-mekanis. Prinsip operasi yang digunakan Over Current Relay ( Relay Pelindung ) ini yaitu dengan tarikan elektromagnetik dan induksi elektromagnetik. Untuk memberikan daya tarik elektromagnetik yaitu dengan menggunakan selenoid yang digerakkan oleh sumber DC atau AC. Dalam relay induksi elektromagnetik, gaya awal dikembangkan pada elemen bergerak karena interaksi fluks elektromagnetik dengan arus Eddy.
2.4.3 Waktu Relay
Waktu operasi merupakan karakteristik penting dari relay. Waktu operasi adalah waktu yang diambil antara saat dimana sinyal penggerak diberi energi dan saat dimana kontak relay ditutup. Ketentuan karakteristik Over Current Relay ditunjukkan pada tabel 2.1. Berdasarkan waktu relay atau waktu operasi relay yang ditunjukkan pada persamaan (2.2), Over Current Relay ( Relay Pelindung ) diklasifikasikan sebagai:
• Relay instantanouse:
Kontak dalam sirkuit relay ditutup segera ketika kuantitas listrik dalam koil relay melebihi batas maksimum tanpa penundaan waktu yang disengaja.
• Relay Time Inverse:
Besarnya arus listrik berbanding terbalik dengan waktu operasi Relay Time Inverse. Waktu trip semakin cepat saat arus yang mengalir semakin besar. Pada jenis ini terdiri dari beberapa jenis relay yang dikenal
10
sebagai Inverse Definite Minimum Time (IDMT), Very Inverse, Extremely Inverse, Standard Inverse, Long Time Inverse.
• Relay Time Definite:
Ada jeda waktu yang pasti antara instan dimana kuantitas listrik melebihi nilai maksimum dan instan dimana kontak relay ditutup. Jenis pengaturan waktu ini tidak tergantung pada besaran kuantitas listrik yang mengalir melalui koil relay. [10]
𝑇
𝑜𝑝=
𝐾 (𝑇𝑀𝑆)(𝑃𝑆𝑀)𝐸−1 (2.2)
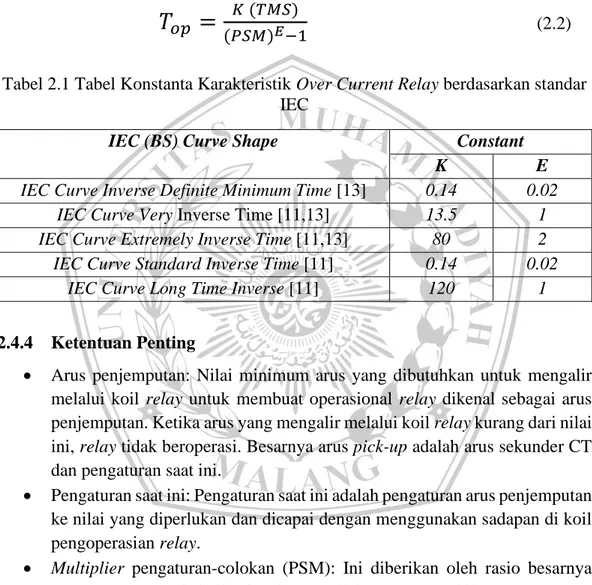
Tabel 2.1 Tabel Konstanta Karakteristik Over Current Relay berdasarkan standar IEC
IEC (BS) Curve Shape Constant
K E
IEC Curve Inverse Definite Minimum Time [13] 0.14 0.02 IEC Curve Very Inverse Time [11,13] 13.5 1 IEC Curve Extremely Inverse Time [11,13] 80 2 IEC Curve Standard Inverse Time [11] 0.14 0.02
IEC Curve Long Time Inverse [11] 120 1
2.4.4 Ketentuan Penting
• Arus penjemputan: Nilai minimum arus yang dibutuhkan untuk mengalir melalui koil relay untuk membuat operasional relay dikenal sebagai arus penjemputan. Ketika arus yang mengalir melalui koil relay kurang dari nilai ini, relay tidak beroperasi. Besarnya arus pick-up adalah arus sekunder CT dan pengaturan saat ini.
• Pengaturan saat ini: Pengaturan saat ini adalah pengaturan arus penjemputan ke nilai yang diperlukan dan dicapai dengan menggunakan sadapan di koil pengoperasian relay.
• Multiplier pengaturan-colokan (PSM): Ini diberikan oleh rasio besarnya arus gangguan pada koil relay dengan nilai arus pengambilan.
• Pengganda pengaturan waktu: Penyesuaian yang disediakan dalam relay untuk mengontrol atau menyesuaikan waktu operasi relay dikenal sebagai pengganda pengaturan waktu. Waktu operasi vs. P.S.M dari Over Current Relay (Relay Pelindung).[12]
11
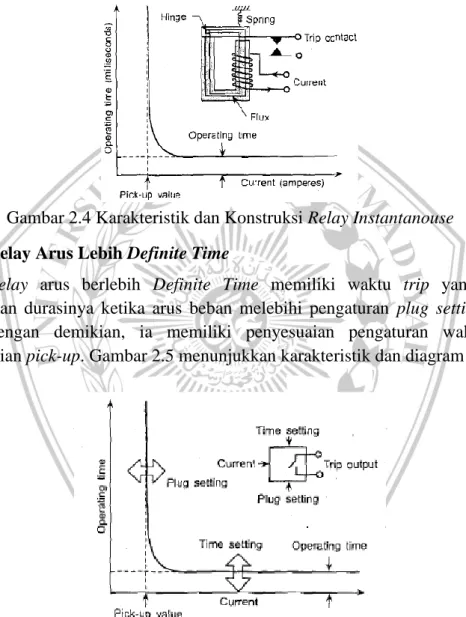
2.4.5 Relay Arus Lebih Instantanouse
Perlu dicatat bahwa kata seketika (instantanouse) memiliki konotasi yang berbeda di bidang proteksi sistem tenaga. Seketika sebenarnya berarti tidak ada penundaan waktu yang disengaja. Namun, seberapa cepat kita ingin relay beroperasi, itu membutuhkan jumlah waktu minimum tertentu. Waktu operasi relay seketika masih lebih lambat beberapa milidetik. Dimana relay hanya memiliki pengaturan plug setting (arus trip) dan tidak memiliki pengaturan waktu.
Gambar 2.4 Karakteristik dan Konstruksi Relay Instantanouse 2.4.6 Relay Arus Lebih Definite Time
Relay arus berlebih Definite Time memiliki waktu trip yang dapat disesuaikan durasinya ketika arus beban melebihi pengaturan plug setting (arus trip). Dengan demikian, ia memiliki penyesuaian pengaturan waktu dan penyesuaian pick-up. Gambar 2.5 menunjukkan karakteristik dan diagram blok.
Gambar 2.5 Karakteristik Relay Definite Time
2.4.7 Relay Arus Lebih Standard Inverse Time
Karakteristik Standard Inverse Time cocok dengan sangat baik, dengan persyaratan bahwa semakin besar suatu kesalahan, semakin cepat harus ditangani
12
untuk menghindari kerusakan pada peralatan. Jenis karakteristik ini secara alami diperoleh dari relay elektromekanis yang telah menyebabkan penggunaan dan standardisasi yang luas. Dengan munculnya relay berbasis mikroprosesor, sekarang dimungkinkan untuk menghasilkan karakteristik waktu yang dapat diperkirakan secara matematis.
𝑇
𝑜𝑝=
0.14 (𝑇𝑀𝑆)(𝑃𝑆𝑀)0.02−1 (2.3)
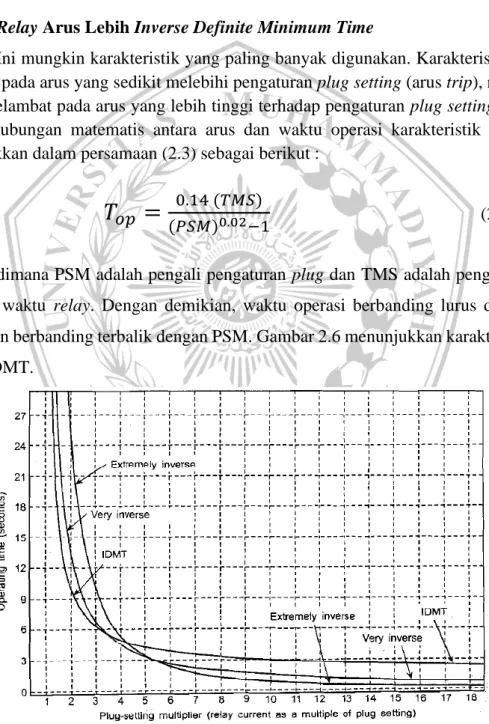
2.4.8 Relay Arus Lebih Inverse Definite Minimum Time
Ini mungkin karakteristik yang paling banyak digunakan. Karakteristiknya terbalik pada arus yang sedikit melebihi pengaturan plug setting (arus trip), namun akan melambat pada arus yang lebih tinggi terhadap pengaturan plug setting (arus trip). Hubungan matematis antara arus dan waktu operasi karakteristik IDMT ditunjukkan dalam persamaan (2.3) sebagai berikut :
𝑇
𝑜𝑝=
0.14 (𝑇𝑀𝑆)(𝑃𝑆𝑀)0.02−1 (2.3)
dimana PSM adalah pengali pengaturan plug dan TMS adalah pengaturan pengali waktu relay. Dengan demikian, waktu operasi berbanding lurus dengan TMS dan berbanding terbalik dengan PSM. Gambar 2.6 menunjukkan karakteristik relay IDMT.
Gambar 2.6 Karakteristik Relay Arus Lebih Inverse Definite Minimum Time
13
2.4.9 Relay Arus Lebih Very Inverse Time
Kebalikan dari karakteristik ini lebih tinggi daripada karakteristik IDMT.
Hubungan matematis antara arus dan waktu operasi dari karakteristik Very Inverse ditunjukkan pada persamaan (2.4) dan sebagai karakteristik relay ditunjukkan pada Gambar 2.6.
𝑇
𝑜𝑝=
13.5 (𝑇𝑀𝑆)(𝑃𝑆𝑀)1−1 (2.4)
2.4.10 Relay Arus Extremely Inverse Time
Kebalikan dari karakteristik ini lebih tinggi daripada karakteristik Very Inverse. Hubungan matematis antara waktu saat ini dan waktu operasi dari karakteristik seperti itu ditunjukkan pada persamaan (2.5).
𝑇
𝑜𝑝=
80.0 (𝑇𝑀𝑆)(𝑃𝑆𝑀)2−1 (2.5)
2.4.11 Relay Arus Long Time Inverse
Kebalikan dari karakteristik ini lebih tinggi daripada karakteristik Very Inverse. Hubungan matematis antara waktu saat ini dan waktu operasi dari karakteristik seperti itu ditunjukkan pada persamaan (2.6) [13].
𝑇
𝑜𝑝=
120.0 (𝑇𝑀𝑆)(𝑃𝑆𝑀)2−1 (2.6)
2.5 Fuzzy Logic
Dalam matematika biasanya hanya menggunakan variabel nilai numerik, namun pada logika fuzzy sering digunakan nilai non-numerik untuk mengekspresikan aturan. Variabel linguistik seperti usia dapat menerima nilai-nilai seperti muda, agak tua, dan tua. Karena bahasa alami tidak selalu mengandung istilah nilai yang cukup untuk mengekspresikan skala nilai fuzzy, adalah praktik umum untuk memodifikasi nilai linguistik dengan kata sifat atau kata keterangan.
Konsep kontrol logika fuzzy diperkenalkan pada tahun 1962 oleh Prof.
Lotfi Astor Zadeh. Kontrol logika fuzzy adalah metodelogi kontrol pemecah masalah yang cocok untuk di aplikasikan ke sistem yang sederhana seperti multi- chanel atau workstation berbasis akuisisi data, embedde system,jaringan PC dan system kontrol. Metodologi ini bisa digunakan pada perangkat lunak, perangkat keras, atau gabungan keduanya. Pada logika boolean dijelaskan bahwa segala sesuatu yang bersifat biner kemungkinanya hanya terdapat “iya atau tidak”. Bolean hanya memiliki nilai keanggotaan 0 dan 1. Sedangkan dalam kontrol logika fuzzy mempunyai kemungkinan nilai keanggotaan terdapat di antara 0 dan 1 yang berarti
14
mungkin saja suatu keadaan mempunyai dua nilai “Ya atau Tidak”, “Benar dan Salah” secara bersamaan, namun besar nilainya tergantung pada bobot keanggotaan yang dimilikinya.
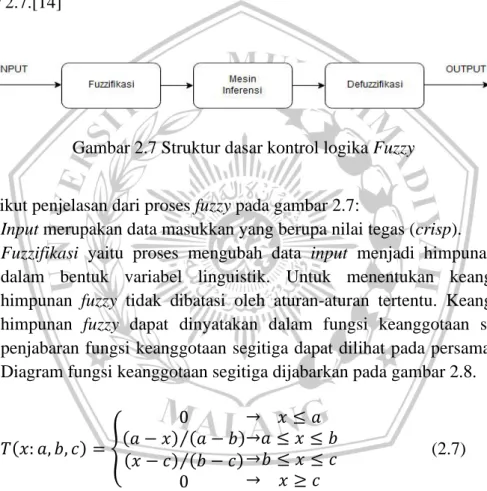
Jika dibandingkan dengan logika konvensional, logika fuzzy memiliki kelebihan yaitu dapat memproses penalaran secara bahasa sehingga dalam prosesnya tidak memerlukan persamaan matematik yang rumit. Beberapa alasan untuk memilih kontrol logika fuzzy diantaranya karena mudah dipahami, mempunyai toleransi terhadap data- data yang tidak tepat, dan dapat memodelkan fungsi-fungsi non-linear yang sangat kompleks. Pemahaman tentang struktur dasar kontrol logika fuzzy diperlukan untuk mengerti tentang proses atau cara kerja dari kontrol logika fuzzy. Struktur dasar dari kontrol logika fuzzy dijabarkan dengan gambar 2.7.[14]
Gambar 2.7 Struktur dasar kontrol logika Fuzzy
Berikut penjelasan dari proses fuzzy pada gambar 2.7:
1. Input merupakan data masukkan yang berupa nilai tegas (crisp).
2. Fuzzifikasi yaitu proses mengubah data input menjadi himpunan fuzzy dalam bentuk variabel linguistik. Untuk menentukan keanggotaan himpunan fuzzy tidak dibatasi oleh aturan-aturan tertentu. Keanggotaan himpunan fuzzy dapat dinyatakan dalam fungsi keanggotaan segitiga.
penjabaran fungsi keanggotaan segitiga dapat dilihat pada persamaan 2.7.
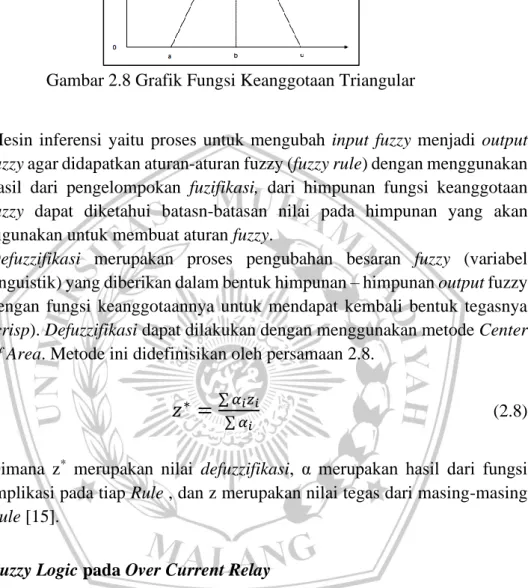
Diagram fungsi keanggotaan segitiga dijabarkan pada gambar 2.8.
𝑇(𝑥: 𝑎, 𝑏, 𝑐) = {
0
(𝑎 − 𝑥) (𝑎 − 𝑏)⁄ (𝑥 − 𝑐) (𝑏 − 𝑐)⁄
0
→
→
→
→
𝑥 ≤ 𝑎 𝑎 ≤ 𝑥 ≤ 𝑏 𝑏 ≤ 𝑥 ≤ 𝑐
𝑥 ≥ 𝑐
(2.7)
15
Gambar 2.8 Grafik Fungsi Keanggotaan Triangular
3. Mesin inferensi yaitu proses untuk mengubah input fuzzy menjadi output fuzzy agar didapatkan aturan-aturan fuzzy (fuzzy rule) dengan menggunakan hasil dari pengelompokan fuzifikasi, dari himpunan fungsi keanggotaan fuzzy dapat diketahui batasn-batasan nilai pada himpunan yang akan digunakan untuk membuat aturan fuzzy.
4. Defuzzifikasi merupakan proses pengubahan besaran fuzzy (variabel linguistik) yang diberikan dalam bentuk himpunan – himpunan output fuzzy dengan fungsi keanggotaannya untuk mendapat kembali bentuk tegasnya (crisp). Defuzzifikasi dapat dilakukan dengan menggunakan metode Center
of Area. Metode ini didefinisikan oleh persamaan 2.8.
𝑧
∗=
∑ 𝛼∑ 𝛼𝑖𝑧𝑖𝑖
(2.8) Dimana z* merupakan nilai defuzzifikasi, α merupakan hasil dari fungsi implikasi pada tiap Rule , dan z merupakan nilai tegas dari masing-masing Rule [15].
2.5.1 Fuzzy Logic pada Over Current Relay
Dalam sistem proteksi sebelumnya telah diamati bahwa ketika arus pada beban besarnya melebihi dari arus setting (PS), beban akan dilepaskan dengan waktu seketika (Instantanouse), atau dengan waktu tertentu (Definite Time), atau waktu yang ditentukan oleh besaran arus yang terbaca (PSM). Algoritma inverse time telah diindustrialisasi, dimana dari pengukuran arus berlebih dan waktu, akan diambil keputusan yang tepat untuk melepaskan beban.
16
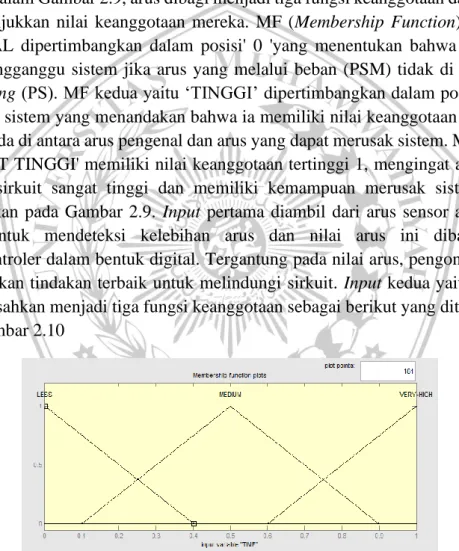
Gambar 2.9 Membership Function TMS1 dari tingginya arus PSM
Dalam Gambar 2.9, arus dibagi menjadi tiga fungsi keanggotaan dan sumbu X menunjukkan nilai keanggotaan mereka. MF (Membership Function) pertama 'NORMAL dipertimbangkan dalam posisi' 0 'yang menentukan bahwa itu tidak akan mengganggu sistem jika arus yang melalui beban (PSM) tidak di atas nilai arus setting (PS). MF kedua yaitu ‘TINGGI’ dipertimbangkan dalam posisi pusat (0,5) dari sistem yang menandakan bahwa ia memiliki nilai keanggotaan 50% dan arus berada di antara arus pengenal dan arus yang dapat merusak sistem. MF ketiga 'SANGAT TINGGI' memiliki nilai keanggotaan tertinggi 1, mengingat arus yang melalui sirkuit sangat tinggi dan memiliki kemampuan merusak sistem yang ditunjukkan pada Gambar 2.9. Input pertama diambil dari arus sensor atau yang diatur untuk mendeteksi kelebihan arus dan nilai arus ini dibaca oleh mikrokontroler dalam bentuk digital. Tergantung pada nilai arus, pengontrol akan memutuskan tindakan terbaik untuk melindungi sirkuit. Input kedua yaitu waktu, juga dipisahkan menjadi tiga fungsi keanggotaan sebagai berikut yang ditampilkan pada Gambar 2.10
Gambar 2.10 Membership Function TMS2 dari tingkat kejadian trip beban Di sini, MF (Membership Function) pertama ‘LOW’ diletakkan di posisi 0%.
MF ‘MEDIUM’ kedua ditempatkan diposisi tengah sistem dan memiliki nilai keanggotaan 50%. MF ketiga ‘HIGH’ nilai keanggotaan tertinggi 100%. Jika arus tinggi mengalir melebihi arus setting untuk waktu yang lama, maka motor akan dihentikan. Input 'WAKTU' diambil dari timer yang diaktifkan apabila arus beban
17
melebihi arus setting, untuk memetakan berbagai kombinasi fungsi keanggotaan dua input dan satu output yang digunakan, yaitu:
• Nilai TMS1 dari tingginya arus PSM (Input)
• Nilai TMS2 dari Tingkat Kejadian (Input)
• Nilai Limit Current dari rata-rata nilai TMS (Output)
variabel input baik pada TMS1 dan TMS2 terdiri dari tiga fungsi keanggotaan dimana fungsi keanggotaan adalah sebagai berikut:
• Normal
• High
• Very High
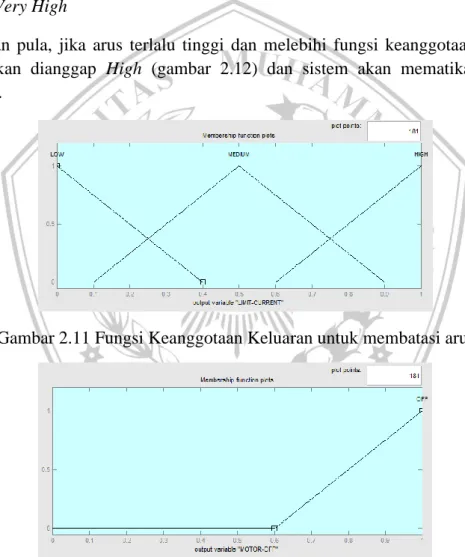
Demikian pula, jika arus terlalu tinggi dan melebihi fungsi keanggotaan Output maka akan dianggap High (gambar 2.12) dan sistem akan mematikan beban seketika.
Gambar 2.11 Fungsi Keanggotaan Keluaran untuk membatasi arus
Gambar 2.12 Ketika arus beban terlampau tinggi mengalir melalui sirkuit, output sistem akan memberikan sinyal kepada kontaktor untuk mematikan motor
seketika.
18
Akhirnya, 12 set aturan baru ditentukan untuk memplot fungsi keanggotaan input dengan fungsi keanggotaan output. Aturan yang didefinisikan menggunakan aturan if-then adalah sebagai berikut (Gambar 2.13)
Gambar 2.13 If Then aturan yang digunakan untuk memetakan input MF ke output MF
Waktu Trip ini dihitung berdasarkan aturan yang ditetapkan dalam pengontrol algoritma fuzzy. Untuk mematikan beban, sebuah kontaktor digunakan dalam sistem Over Current Relay[16].
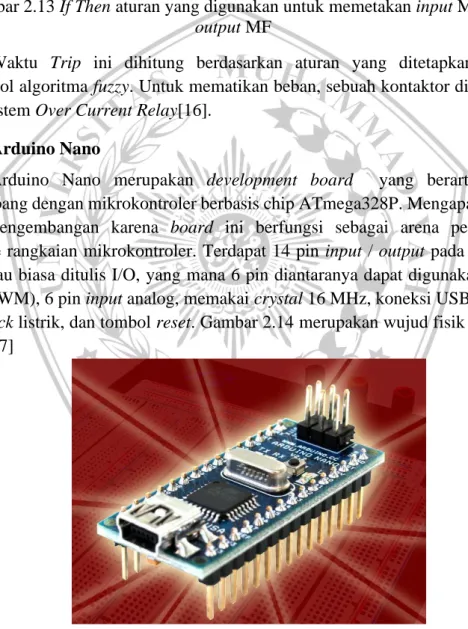
2.6 Arduino Nano
Arduino Nano merupakan development board yang berarti papan pengembang dengan mikrokontroler berbasis chip ATmega328P. Mengapa disebut papan pengembangan karena board ini berfungsi sebagai arena pembuatan prototipe rangkaian mikrokontroler. Terdapat 14 pin input / output pada Arduino nano (atau biasa ditulis I/O, yang mana 6 pin diantaranya dapat digunakan untuk output PWM), 6 pin input analog, memakai crystal 16 MHz, koneksi USB, header ICSP, jack listrik, dan tombol reset. Gambar 2.14 merupakan wujud fisik Arduino Nano. [17]
Gambar 2.14 Arduino Nano
19
2.7 Sensor Arus (SCT 013-000 )
Pada sensor Arus SCT 013-000 memiliki prinsip kerja dengan mengukur arus AC dari kabel beban dengan tegangan AC yang melewati transformer (CT) yang terdapat didalam komponen sensor. Seperti transformator pada umumnya, transformator di sensor arus ini juga memiliki gulungan sekunder, inti magnetik, dan gulungan primer. Gambar 2.15 merupakan wujud sensor arus.
[18]
Gambar 2.15 SCT 013-000
2.8 LCD 16x2
LCD (Liquid Crystal Display) merupakan alat media tampil dengan kristal cair menjadi penampil utamanya. LCD telah dimanfaatkan dalam berbagai bidang yang diantaranya adalah alat-alat elektronik seperti layar komputer, televisi maupun kalkulator. LCD dot matrik dengan jumlah karakter 20x4 digunakan pada postingan aplikasi LCD. LCD sangat berguna sebagai penampil yang berfungsi sebagai penampil status kerja alat. [19]
Gambar 2.16 LCD 20x4 2.9 I2C
Integrated Circuit biasa disebut I2C merupakan standar komunikasi serial dua arah memakai dua saluran yang dirancang khusus untuk dapat mentransfer juga
20
menerima data. Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang mengirim informasi data antara I2C dengan pengontrolnya. Master dan slave merupakan piranti yang digunakan untuk mengoprasikan sistem I2C Bus.
Master merupakan piranti yang akan memulai transfer data pada I2C Bus dengan membuat sinyal Start, menyelesaikan transfer data dengan membentuk sinyal Stop, dan mengaktifkan sinyal clock. Slave adalah piranti yang diberi alamat oleh master.
[20]
Gambar 2.17 I2C 2.10 Relay 1 Channel
Relay merupakan switch atau saklar yang beroperasi dengan sumber trgangan listrik. Selain itu, relay merupakan komponen electromechanical (elektromekanikal) dengan 2 bagian utama yaitu, mekanikal (seperangkat kontak saklar/switch) dan elektromagnet (Coil). Prinsip yang digunakan dalam relay adalah prinsip elektromagnetik yang berguna sebagai penggerak kontak saklar sehingga arus listrik kecil (low power) mampu menghantarkan listrik dengan tegangan yang lebih besar. Salah satu contohnya adalah saat Armature Relay (yang berfungsi sebagai saklar) bergerak menghantarkan listrik 220V 2A menggunakan relay dengan elektromagnet 5V dan 50 mA. [21]
Gambar 2.18 Relay 1 channel
21
2.11 Potensiometer
Potensiometer merupakan resistor dengan tiga terminal yang diberi sambungan geser membentuk pembagi tegangan agar dapat disetel. Potensiometer berfungsi sebagai resistor variabel atau Rheostat. Gambar 2.19 merupakan wujud potensiometer. [22]
Gambar 2.19 Potensiometer 2.12 Push Button
Push Button adalah saklar tombol yang digunakan untuk pemutus atau penyambung arus listrik dari sumber arus ke beban listrik. Sistem Push Button terdiri dari saklar start, stop, reset dan saklar untuk emergency. [23]
Gambar 2.20 Push Button 2.13 Pengkondisi Sinyal
Pengkondisian sinyal merupakan suatu konversi sinyal menjadi betuk yang lebih sesuai dengan yang dibutuhkan unuk suatu komponen dengan komponen lainnya . Dimana rangkaian ini terdiri dari 2 jenis yaitu pengkondisi sinyal digital dan pengkondisi sinyal analog. [24]
2.14 RTC
DS3231 adalah real-time clock I2C merupakan komponen yang berfungsi untuk memberikan ketepatan waktu yang akurat dan terdapat baterai didalamnya bertujuan untuk menjaga waktu yang akurat saat daya utama ke perangkat terputus atau terganggu. Terdapat Integrasi resonator kristal untuk meningkatkan keakuratan jangka panjang perangkat. Gambar 2.21 merpakan wujud RTC. [25]
22
Gambar 2.21 RTC
2.15 Power Supply
Gambar 2.22 merupakan rangkaian power supply dengan Voltage Regulator (regulator tegangan) dapat mengeluarkan tegangan output DC (Direct Current) konstan yang pada dasarnya tidak bergantung pada tegangan input, beban arus output, dan temperatur. Sebagian besar voltage regulator (regulator tegangan) memiliki dua kategori yaitu, regulator switching dan regulator linier. Terdapat tiga konfigurasi umum pada regulator switching yakni, inverting, step-up, dan step- down. Sedangkan regulator linier memiliki dua tipe umum terdiri dari regulator shunt dan regulator seri. Regulator ini tersedia untuk tegangan negatif maupun positif. Pada regulator ganda menyediakan output negatif dan positif. [26]
Gambar 2.22 Gambar rangkaian power supply.