BAB II DASAR TEORI
2.1 Op-Amp
Kalau perlu mendesain sinyal level meter, histeresis pengatur suhu, osilator, pembangkit sinyal, penguat audio, penguat mic, filter aktif semisal tapis nada bass, mixer, konverter sinyal, integrator, differensiator, komparator dan sederet aplikasi lainnya, selalu pilihan yang mudah adalah dengan membolak-balik data komponen yang bernama op-amp. Komponen elektronika analog dalam kemasan IC (integrated circuits) ini memang adalah komponen serbaguna dan dipakai pada banyak aplikasi hingga sekarang. Hanya dengan menambah beberapa resitor dan potensiometer, dalam sekejap (atau dua kejap) sebuah pre-amp audio kelas B sudah dapat jadi dirangkai di atas sebuah proto-board.
2.1.1 Penguat diferensial
Op-amp dinamakan juga dengan penguat diferensial (differential amplifier). Sesuai dengan istilah ini, op-amp adalah komponen IC yang memiliki 2 input tegangan dan 1 output tegangan, dimana tegangan output-nya adalah proporsional terhadap perbedaan tegangan antara kedua inputnya itu. Penguat
diferensial seperti yang ditunjukkan pada gambar-1 merupakan rangkaian dasar dari sebuah op-amp.
Gambar-2.1 : penguat diferensial
Pada rangkaian yang demikian, persamaan pada titik Vout adalah Vout = A(v1-v2) dengan A adalah nilai penguatan dari penguat diferensial ini. Titik input v1 dikatakan sebagai input non-iverting, sebab tegangan vout satu phase dengan v1. Sedangkan sebaliknya titik v2 dikatakan input inverting sebab berlawanan phasa dengan tengangan vout.
2.1.2 Diagram Op-amp
Op-amp di dalamnya terdiri dari beberapa bagian, yang pertama adalah penguat diferensial, lalu ada tahap penguatan (gain), selanjutnya ada rangkaian penggeser level (level shifter) dan kemudian penguat akhir yang biasanya dibuat dengan penguat push-pull kelas B. Gambar-2(a) berikut menunjukkan diagram dari op-amp yang terdiri dari beberapa bagian tersebut.
Gambar-2.2 : Diagram blok Op-Amp
Gambar-2.3 : Diagram schematic simbol Op-Amp
Simbol op-amp adalah seperti pada gambar-2(b) dengan 2 input, non-inverting (+) dan input non-inverting (-). Umumnya op-amp bekerja dengan dual supply (+Vcc dan –Vee) namun banyak juga op-amp dibuat dengan single supply (Vcc – ground). Simbol rangkaian di dalam op-amp pada gambar-2(b) adalah parameter umum dari sebuah op-amp. Rin adalah resitansi input yang nilai idealnya infinit (tak terhingga). Rout adalah resistansi output dan besar resistansi idealnya 0 (nol). Sedangkan AOL adalah nilai penguatan open loop dan nilai idealnya tak terhingga.
Saat ini banyak terdapat tipe-tipe op-amp dengan karakterisktik yang spesifik. Op-amp standard type 741 dalam kemasan IC DIP 8 pin sudah dibuat sejak tahun 1960-an. Untuk tipe yang sama, tiap pabrikan mengeluarkan seri IC dengan insial atau nama yang berbeda. Misalnya dikenal MC1741 dari motorola,
LM741 buatan National Semiconductor, SN741 dari Texas Instrument dan lain sebagainya. Tergantung dari teknologi pembuatan dan desain IC-nya, karakteristik satu op-amp dapat berbeda dengan op-amp lain. Tabel-1 menunjukkan beberapa parameter op-amp yang penting beserta nilai idealnya dan juga contoh real dari parameter LM714.
Tabel-2.1 : parameter op-amp yang penting
2.1.3 Penguatan Open-loop
Op-amp idealnya memiliki penguatan open-loop (AOL) yang tak terhingga. Namun pada prakteknya op-amp semisal LM741 memiliki penguatan yang terhingga kira-kira 100.000 kali. Sebenarnya dengan penguatan yang sebesar ini, sistem penguatan op-amp menjadi tidak stabil. Input diferensial yang amat kecil saja sudah dapat membuat outputnya menjadi saturasi. Pada bab berikutnya akan dibahas bagaimana umpan balik bisa membuat sistem penguatan op-amp menjadi stabil.
2.1.4 Unity-gain frequency
Op-amp ideal mestinya bisa bekerja pada frekuensi berapa saja mulai dari sinyal dc sampai frekuensi giga Herzt. Parameter unity-gain frequency menjadi penting jika op-amp digunakan untuk aplikasi dengan frekuensi tertentu.
Parameter AOL biasanya adalah penguatan op-amp pada sinyal DC. Response penguatan op-amp menurun seiring dengan menaiknya frekuenci sinyal input. Op-amp LM741 misalnya memiliki unity-gain frequency sebesar 1 MHz. Ini berarti penguatan op-amp akan menjadi 1 kali pada frekuensi 1 MHz. Jika perlu merancang aplikasi pada frekeunsi tinggi, maka pilihlah op-amp yang memiliki unity-gain frequency lebih tinggi.
2.1.5 Slew rate
Di dalam op-amp kadang ditambahkan beberapa kapasitor untuk kompensasi dan mereduksi noise. Namun kapasitor ini menimbulkan kerugian yang menyebabkan response op-amp terhadap sinyal input menjadi lambat. Op-amp ideal memiliki parameter slew-rate yang tak terhingga. Sehingga jika input berupa sinyal kotak, maka outputnya juga kotak. Tetapi karena ketidak idealan amp, maka sinyal output dapat berbentuk ekponensial. Sebagai contoh praktis, amp LM741 memiliki slew-rate sebesar 0.5V/us. Ini berarti perubahan output op-amp LM741 tidak bisa lebih cepat dari 0.5 volt dalam waktu 1 us.
2.1.6 Parameter CMRR
Ada satu parameter yang dinamakan CMRR (Commom Mode Rejection Ratio). Parameter ini cukup penting untuk menunjukkan kinerja op-amp tersebut. Op-amp dasarnya adalah penguat diferensial dan mestinya tegangan input yang dikuatkan hanyalah selisih tegangan antara input v1 (non-inverting) dengan input v2 (inverting). Karena ketidak-idealan op-amp, maka tegangan persamaan dari kedua input ini ikut juga dikuatkan. Parameter CMRR diartikan sebagai
kemampuan op-amp untuk menekan penguatan tegangan ini (common mode) sekecil-kecilnya. CMRR didefenisikan dengan rumus CMRR = ADM/ACM yang dinyatakan dengan satuan dB. Contohnya op-amp dengan CMRR = 90 dB, ini artinya penguatan ADM (differential mode) adalah kira-kira 30.000 kali dibandingkan penguatan ACM (commom mode). Kalau CMRR-nya 30 dB, maka artinya perbandingannya kira-kira hanya 30 kali. Kalau diaplikasikan secara real, misalkan tegangan input v1 = 5.05 volt dan tegangan v2 = 5 volt, maka dalam hal ini tegangan diferensialnya (differential mode) = 0.05 volt dan tegangan persamaan-nya (common mode) adalah 5 volt. Pembaca dapat mengerti dengan CMRR yang makin besar maka op-amp diharapkan akan dapat menekan penguatan sinyal yang tidak diinginkan (common mode) sekecil-kecilnya. Jika kedua pin input dihubung singkat dan diberi tegangan, maka output op-amp mestinya nol. Dengan kata lain, op-amp dengan CMRR yang semakin besar akan semakin baik.
Operational Amplifier atau di singkat op-amp merupakan salah satu komponen analog yang popular digunakan dalam berbagai aplikasi rangkaian elektronika. Aplikasi op-amp popular yang paling sering dibuat antara lain adalah rangkaian inverter, non-inverter, integrator dan differensiator. Pada pokok bahasan kali ini akan dipaparkan beberapa aplikasi op-amp yang paling dasar, dimana rangkaian feedback (umpan balik) negatif memegang peranan penting. Secara umum, umpanbalik positif akan menghasilkan osilasi sedangkan umpanbalik negatif menghasilkan penguatan yang dapat terukur.
2.1.7 Op-amp ideal
Op-amp pada dasarnya adalah sebuah differential amplifier (penguat diferensial) yang memiliki dua masukan. Input (masukan) op-amp seperti yang telah dimaklumi ada yang dinamakan input inverting dan non-inverting. Op-amp ideal memiliki open loop gain (penguatan loop terbuka) yang tak terhingga besarnya. Seperti misalnya op-amp LM741 yang sering digunakan oleh banyak praktisi elektronika, memiliki karakteristik tipikal open loop gain sebesar 104 ~ 105. Penguatan yang sebesar ini membuat op-amp menjadi tidak stabil, dan penguatannya menjadi tidak terukur (infinite). Disinilah peran rangkaian negative feedback (umpanbalik negatif) diperlukan, sehingga op-amp dapat dirangkai menjadi aplikasi dengan nilai penguatan yang terukur (finite). Impedasi input op-amp ideal mestinya adalah tak terhingga, sehingga mestinya arus input pada tiap masukannya adalah 0. Sebagai perbandingan praktis, op-amp LM741 memiliki impedansi input Zin = 106 Ohm. Nilai impedansi ini masih relatif sangat besar sehingga arus input op-amp LM741 mestinya sangat kecil.
Ada dua aturan penting dalam melakukan analisa rangkaian op-amp berdasarkan karakteristik op-amp ideal. Aturan ini dalam beberapa literatur dinamakan golden rule, yaitu :
Aturan 1 : Perbedaan tegangan antara input v+ dan v- adalah nol (v+ - v- = 0 atau v+ = v- )
Aturan 2 : Arus pada input Op-amp adalah nol (i+ = i- = 0)
Inilah dua aturan penting op-amp ideal yang digunakan untuk menganalisa rangkaian op-amp.
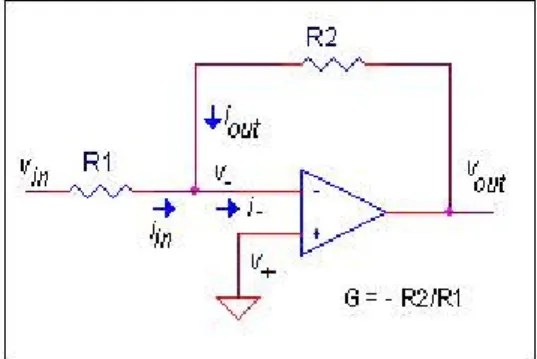
2.1.8 Inverting amplifier
Rangkaian dasar penguat inverting adalah seperti yang ditunjukkan pada gambar 1, dimana sinyal masukannya dibuat melalui input inverting. Seperti tersirat pada namanya, pembaca tentu sudah menduga bahwa fase keluaran dari penguat inverting ini akan selalu berbalikan dengan inputnya. Pada rangkaian ini, umpanbalik negatif di bangun melalui resistor R2.
Gambar 2.4 : penguat inverter
Input non-inverting pada rangkaian ini dihubungkan ke ground, atau v+ = 0. Dengan mengingat dan menimbang aturan 1 (lihat aturan 1), maka akan dipenuhi v- = v+ = 0. Karena nilainya = 0 namun tidak terhubung langsung ke ground, input op-amp v- pada rangkaian ini dinamakan virtual ground. Dengan fakta ini, dapat dihitung tegangan jepit pada R1 adalah vin – v- = vin dan tegangan jepit pada reistor R2 adalah vout – v- = vout. Kemudian dengan menggunakan aturan 2, di ketahui bahwa :
iin + iout = i- = 0, karena menurut aturan 2, arus masukan op-amp adalah 0. iin + iout = vin/R1 + vout/R2 = 0
Selanjutnya
vout/vin = - R2/R1
Jika penguatan G didefenisikan sebagai perbandingan tegangan keluaran terhadap tegangan masukan, maka dapat ditulis
…(1)
Impedansi rangkaian inverting didefenisikan sebagai impedansi input dari sinyal masukan terhadap ground. Karena input inverting (-) pada rangkaian ini diketahui adalah 0 (virtual ground) maka impendasi rangkaian ini tentu saja adalah Zin = R1.
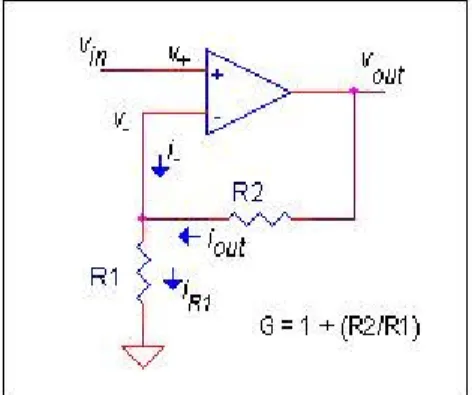
2.1.9 Non-Inverting amplifier
Prinsip utama rangkaian penguat non-inverting adalah seperti yang diperlihatkan pada gambar 2 berikut ini. Seperti namanya, penguat ini memiliki masukan yang dibuat melalui input non-inverting. Dengan demikian tegangan keluaran rangkaian ini akan satu fasa dengan tegangan inputnya. Untuk menganalisa rangkaian penguat op-amp non inverting, caranya sama seperti menganalisa rangkaian inverting.
Gambar 2.5 : penguat non-inverter
Dengan menggunakan aturan 1 dan aturan 2, kita uraikan dulu beberapa fakta yang ada, antara lain :
vin = v+
v+ = v- = vin ... lihat aturan 1.
Dari sini ketahui tegangan jepit pada R2 adalah vout – v- = vout – vin, atau iout = (vout-vin)/R2. Lalu tegangan jepit pada R1 adalah v- = vin, yang berarti arus iR1 = vin/R1.
Hukum kirchkof pada titik input inverting merupakan fakta yang mengatakan bahwa :
iout + i(-) = iR1
Aturan 2 mengatakan bahwa i(-) = 0 dan jika disubsitusi ke rumus yang sebelumnya, maka diperoleh
iout = iR1 dan Jika ditulis dengan tegangan jepit masing-masing maka diperoleh (vout – vin)/R2 = vin/R1 yang kemudian dapat disederhanakan menjadi :
vout = vin (1 + R2/R1)
Jika penguatan G adalah perbandingan tegangan keluaran terhadap tegangan masukan, maka didapat penguatan op-amp non-inverting :
… (2)
Impendasi untuk rangkaian Op-amp non inverting adalah impedansi dari input non-inverting op-amp tersebut. Dari datasheet, LM741 diketahui memiliki impedansi input Zin = 108 to 1012 Ohm.
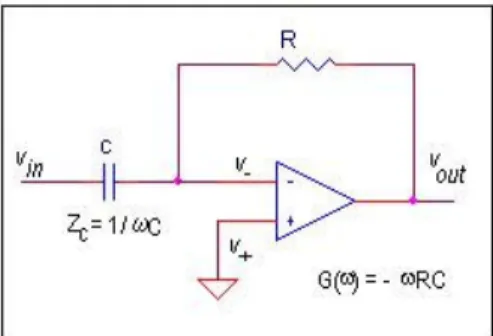
2.1.10 Integrator
Opamp bisa juga digunakan untuk membuat rangkaian-rangkaian dengan respons frekuensi, misalnya rangkaian penapis (filter). Salah satu contohnya adalah rangkaian integrator seperti yang ditunjukkan pada gambar 3. Rangkaian dasar sebuah integrator adalah rangkaian op-amp inverting, hanya saja rangkaian umpanbaliknya (feedback) bukan resistor melainkan menggunakan capasitor C.
Gambar2.6 : integrator
Mari kita coba menganalisa rangkaian ini. Prinsipnya sama dengan menganalisa rangkaian op-amp inverting. Dengan menggunakan 2 aturan op-amp (golden rule) maka pada titik inverting akan didapat hubungan matematis :
iin = (vin – v-)/R = vin/R , dimana v- = 0 (aturan1) iout = -C d(vout – v-)/dt = -C dvout/dt; v- = 0 iin = iout ; (aturan 2)
Maka jika disubtisusi, akan diperoleh persamaan : iin = iout = vin/R = -C dvout/dt, atau dengan kata lain
Dari sinilah nama rangkaian ini diambil, karena secara matematis tegangan keluaran rangkaian ini merupakan fungsi integral dari tegangan input. Sesuai dengan nama penemunya, rangkaian yang demikian dinamakan juga rangkaian Miller Integral. Aplikasi yang paling populer menggunakan rangkaian integrator adalah rangkaian pembangkit sinyal segitiga dari inputnya yang berupa sinyal kotak.
Dengan analisa rangkaian integral serta notasi Fourier, dimana f = 1/t dan
…(4)
penguatan integrator tersebut dapat disederhanakan dengan rumus
…(5)
Sebenarnya rumus ini dapat diperoleh dengan cara lain, yaitu dengan mengingat rumus dasar penguatan opamp inverting
G = - R2/R1. Pada rangkaian integrator (gambar 3) tersebut diketahui
Dengan demikian dapat diperoleh penguatan integrator tersebut seperti persamaan (5) atau agar terlihat respons frekuensinya dapat juga ditulis dengan
…(6)
Karena respons frekuensinya yang demikian, rangkain integrator ini merupakan dasar dari low pass filter. Terlihat dari rumus tersebut secara matematis, penguatan akan semakin kecil (meredam) jika frekuensi sinyal input semakin besar.
Pada prakteknya, rangkaian feedback integrator mesti diparalel dengan sebuah resistor dengan nilai misalnya 10 kali nilai R atau satu besaran tertentu yang diinginkan. Ketika inputnya berupa sinyal dc (frekuensi = 0), kapasitor akan berupa saklar terbuka. Jika tanpa resistor feedback seketika itu juga outputnya akan saturasi sebab rangkaian umpanbalik op-amp menjadi open loop (penguatan open loop opamp ideal tidak berhingga atau sangat besar). Nilai resistor feedback sebesar 10R akan selalu menjamin output offset voltage (offset tegangan keluaran) sebesar 10x sampai pada suatu frekuensi cutoff tertentu.
2.1.11 Differensiator
Kalau komponen C pada rangkaian penguat inverting di tempatkan di depan, maka akan diperoleh rangkaian differensiator seperti pada gambar 4. Dengan analisa yang sama seperti rangkaian integrator, akan diperoleh persamaan penguatannya :
…(7)
Rumus ini secara matematis menunjukkan bahwa tegangan keluaran vout pada rangkaian ini adalah differensiasi dari tegangan input vin. Contoh praktis dari hubungan matematis ini adalah jika tegangan input berupa sinyal segitiga, maka outputnya akan mengahasilkan sinyal kotak.
Bentuk rangkain differensiator adalah mirip dengan rangkaian inverting. Sehingga jika berangkat dari rumus penguat inverting
G = -R2/R1
dan pada rangkaian differensiator diketahui :
maka jika besaran ini disubtitusikan akan didapat rumus penguat differensiator
…(8)
Dari hubungan ini terlihat sistem akan meloloskan frekuensi tinggi (high pass filter), dimana besar penguatan berbanding lurus dengan frekuensi. Namun demikian, sistem seperti ini akan menguatkan noise yang umumnya berfrekuensi tinggi. Untuk praktisnya, rangkain ini dibuat dengan penguatan dc sebesar 1 (unity gain). Biasanya kapasitor diseri dengan sebuah resistor yang nilainya sama dengan R. Dengan cara ini akan diperoleh penguatan 1 (unity gain) pada nilai frekuensi cutoff tertentu.
2.2 Mikrokontroler
Mikrokontroler adalah salah satu dari bagian dasar dari suatu sistem komputer. Mikrokontroler merupakan mikroprosessor yang dirancang khusus untuk aplikasi kontrol, dan dilengkapi dengan ROM, RAM dan fasilitas I/O pada satu chip. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroler dibangun dari elemen-elemen dasar yang sama. Secara sederhana, komputer akan menghasilkan output spesifik berdasarkan inputan yang diterima dan program yang dikerjakan.
Seperti umumnya komputer, mikrokontroler adalah alat yang mengerjakan instruksi-instruksi yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer. Program ini menginstruksikan komputer untuk melakukan jalinan yang panjang dari aksi-aksi sederhana untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer.
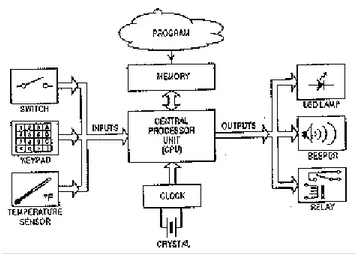
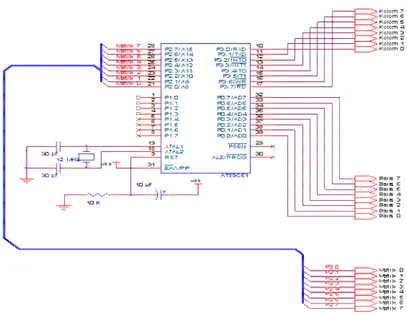
Gambar 2.8 sistem mikrokontroller
Setelah dipaparkan bagian-bagian dari suatu sistem komputer, sekarang akan dibahas mengenai mikrokontroler. Digambarkan sistem komputer dengan bagian yang dikelilingi oleh garis putus-putus. Bagian inilah yang menyusun mikrokontroler. Bagian yang dilingkupi kotak bagian bawah adalah gambar lebih detail dari susunan bagian yang dilingkupi garis putus-putus. Kristal tidak termasuk dalam sistem mikrokontroler tetapi diperlukan dalam sirkuit osilator clock.
Suatu mikrokontroler dapat didefinisikan sebagai sistem komputer yang lengkap termasuk sebuah CPU, memori, osilator clock, dan I/O dalam satu
rangkaian terpadu. Jika sebagian elemen dihilangkan, yaitu I/O dan memori, maka chip ini akan disebut sebagai mikroprosesor.
2.2.1 Mikrokontroler AT89S52
Mikrokontroler AT89S52 adalah salah satu anggota dari keluarga MCS-51/52 yang dilengkapi dengan internal 8 Kbyte Flash PEROM (Programmable and Erasable Read Only Memory), yang memungkinkan memori program untuk dapat deprogram kembali. AT89S52 dirancang oleh Atmel sesuai dengan instruksi
Mikrokontroler AT89S52 memiliki :
• Sebuah CPU ( Central Processing Unit ) 8 Bit. • 256 byte RAM ( Random Acces Memory ) internal.
• Empat buah port I/O, yang masing masing terdiri dari 8 bit • Osilator internal dan rangkaian pewaktu.
• Dua buah timer/counter 16 bit
• Lima buah jalur interupsi ( 2 buah interupsi eksternal dan 3 interupsi internal). • Sebuah port serial dengan full duplex UART (Universal Asynchronous
Receiver Transmitter).
• Mampu melaksanakan proses perkalian, pembagian, dan Boolean. • EPROM yang besarnya 8 KByte untuk memori program.
• Kecepatan maksimum pelaksanaan instruksi per siklus adalah 0,5 s pada
frekuensi clock 24 MHz. Apabila frekuensi clock mikrokontroler yang digunakan adalah 12 MHz, maka kecepatan pelaksanaan instruksi adalah 1 s
2.2.2 CPU ( Central Processing Unit )
Bagian ini berfungsi mengendalikan seluruh operasi pada mikrokontroler. Unit ini terbagi atas dua bagian, yaitu unit pengendali atau CU ( Control Unit ) dan unit aritmatika dan logika atau ALU ( Aritmetic logic Unit ) Fungsi utama unit pengendali adalah mengambil instruksi dari memori (fetch) kemudian menterjemahkan susunan instruksi tersebut menjadi kumpulan proses kerja sederhana (decode), dan melaksanakan urutan instruksi sesuai dengan langkah-langkah yang telah ditentukan program (execute). Unit aritmatika dan logika merupakan bagian yang berurusan dengan operasi aritmatika seperti penjumlahan,
pengurangan, serta manipulasi data secara logika seperti operasi AND, OR, dan perbandingan.
2.2.3 Bagian Masukan/Keluaran (I/O)
Bagian ini berfungsi sebagai alat komunikasi serpih tunggal dengan piranti di luar sistem. Sesuai dengan namanya, perangkat I/O dapat menerima maupun memberi data dari /ke serpih tunggal.
Ada dua macam piranti I/O yang digunakan, yaitu piranti untuk hubungan serial UART (Universal Asynchronous Receiver Transmitter) dan piranti untuk hubungan pararel yang disebut dengan PIO (Pararel Input Output). Kedua jenis I/O tersebut telah tersedia di dalam serpih tunggal AT89S52.
2.2.4 Perangkat Lunak
Serpih tunggal keluarga MCS-51 memiliki bahasa pemrograman khusus yang tidak dipahami oleh jenis serpih tunggal yang lain. Bahasa pemrograman ini dikenal dengan nama bahasa assembler yang memiliki 256 perangkat instruksi. Namun saat ini pemrograman mikrokontroler dapat dilakukan dengan menggunakan bahasa C. Dengan bahasa C, pemrograman mikrokontroler menjadi lebih mudah, hal ini karena dengan format bahasa C akan secara otomatis diubah menjadi bahasa assembler dengan format file hexa. Perangkat lunak pada mikrokontroler dapat dibagi menjadi lima kelompok sebagai berikut :
1. Instruksi Transfer Data
Instruksi ini berfungsi memindahkan data, yaitu antar register, dari memori ke memori, dari register ke memori dan lain lain.
2. Instruksi Aritmatika
Instruksi ini melaksanakan operasi aritmatika yang meliputi penjumlahan, pengurangan, penambahan satu (increment), pengurangan satu (decrement), perkalian dan pembagian.
3. Instruksi Logika dan Manipulasi Bit
Berfungsi melaksanakan operasi logika AND, OR, XOR, perbandingan, penggeseran dan komplemen data.
4. Instruksi Percabangan
Berfungsi untuk mengubah urutan normal pelaksanaan suatu program. Dengan instruksi ini, program yang sedang dilaksanakan akan meloncat ke suatu alamat tertentu.
5. Instruksi Stack, I/O, dan Kontrol
Instruksi ini mengatur penggunaan stack, membaca/menulis port I/O, serta pengontrolan.
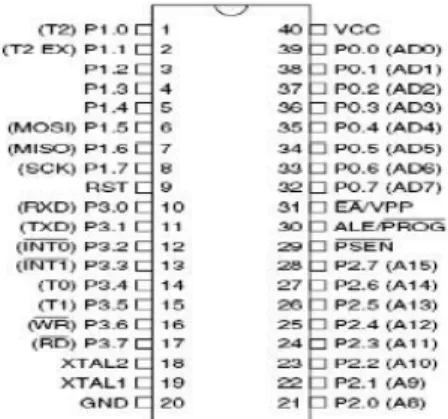
2.2.5 Konfigurasi Pin
Mikrokontroler AT89S52 mempunyai 40 pin dengan catu daya tunggal 5 Volt. Ke-40 pin tersebut digambarkan sebagai berikut :
Fungsi dari masing-masing pin AT89S52 adalah :
1. Pin 1 sampai 8 (Port 1) merupakan port pararel 8 bit dua arah (bidirectional)
yang dapat digunakan untuk berbagai keperluan (general purpose). 2. Pin 9 merupakan pin reset, reset aktif jika mendapat catuan tinggi.
3. Pin 10 sampai 17 (Port 3) adalah port pararel 8 bit dua arah yang memiliki
fungsi pengganti sebagai berikut :
• P3.0 (10) : RXD (port serial penerima data) • P3.1 (11) : TXD (port serial pengirim data)
• P3.2 (12) : INT0 (input interupsi eksternal 0, aktif low) • P3.3 (13) : INT1 (input interupsi ekstrernal 1, aktif low) • P3.4 (14) : T0 (eksternal input timer / counter 0) • P3.5 (15) : T1 (eksternal input timer / counter 1)
• P3.6 (16) : WR (Write, aktif low) Sinyal kontrol penulisan data dari port 0
ke memori data dan input-output eksternal.
• P3.7 (17) : RD (Read, aktif low) Sinyal kontrol pembacaan memori data
input-output eksternal ke port 0.
4. Pin 18 sebagai XTAL 2, keluaran osilator yang terhubung pada kristal.
5. Pin 19 sebagai XTAL 1, masukan ke osilator berpenguatan tinggi, terhubung
pada kristal.
6. Pin 20 sebagai Vss, terhubung ke 0 atau ground pada rangkaian.
7. Pin 21 sampai 28 (Port 2) adalah port pararel 8 bit dua arah. Port ini mengirim
8. Pin 29 sebagai PSEN (Program Store Enable) adalah sinyal yang digunakan
untuk membaca, memindahkan program memori eksternal (ROM / EPROM) ke mikrokontroler (aktif low).
9. Pin 30 sebagai ALE (Address Latch Enable) untuk menahan alamat bawah
selama mengakses memori eksternal. Pin ini juga berfungsi sebagai PROG (aktif low) yang diaktifkan saat memprogram internal flash memori pada mikrokontroler (on chip).
10. Pin 31 sebagai EA (External Accesss) untuk memilih memori yang akan
digunakan, memori program internal (EA = Vcc) atau memori program eksternal (EA = Vss), juga berfungsi sebagai Vpp (programming supply voltage) pada saat memprogram internal flash memori pada mikrokontroler. 11. Pin 32 sampai 39 (Port 0) merupakan port pararel 8 bit dua arah. Berfungsi
sebagai alamat bawah yang dimultipleks dengan data untuk mengakses program dan data memori eksternal.
12. Pin 40 sebagai Vcc, terhubung ke +5 V sebagai catuan untuk mikrokontroler.
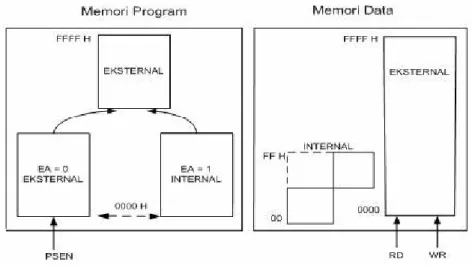
2.2.6 Organisasi Memori
Semua serpih tunggal dalam keluarga MCS-51 memiliki pembagian ruang alamat untuk program dan data. Pemisahan memori program dan memori data memperbolehkan memori data untuk diakses oleh alamat 8 bit. Sekalipun demikian, alamat data memori 16 bit dapat dihasilkan melalui register DPTR (Data Point Register). Memori program hanya bisa dibaca tidak bisa ditulis karena disimpan dalam EPROM. Dalam hal ini EPROM yang tersedia di dalam serpih tunggal AT89S52 sebesar 8 Kbyte
Gambar 2.10 Memori program a. Memori Program
Pada EPROM 8 Kbyte, jika EA (External Access) bernilai tinggi, maka program akan menempati alamat 0000 H sampai 0FFF H secara internal. Jika EA bernilai rendah maka program akan menempati alamat 1000 H sampai FFFF H ke program eksternal.
b. Memori data
Memori data internal dipetakan seperti pada gambar di bawah ini Ruang memorinya dibagi menjadi tiga blok yaitu bagian 128 bawah, 128 atas, dan ruang SFR (Special Function Register)
Bagian RAM 128 byte bawah dipetakan menjadi 32 byte bawah dikelompokkan menjadi 4 bank dan 8 register (R0 sampai R7). Pada bagian 16 byte berikutnya, di atas bank-bank register, membentuk suatu blok ruang memori yang bisa teralamati per bit (bit addressable). Alamat-alamat bit ini adalah 00 H hingga 7F H. Semua byte yang berada di dalam 128 bawah dapat diakses baik secara langsung maupun tidak langsung. Bagian 128 atas hanya dapat diakses dengan pengalamatan tidak langsung. Bagian 128 atas dari RAM hanya ada di dalam piranti yang memiliki RAM 256 byte.
2.3 IC ULN 2803
Kemampuan transistor jenis NPN yang digunakan untuk men-driver dotmatriks harus mampu mengalirkan arus sebesar kemampuan maksimal dari kebutuhan dotmatriks. Sehingga transistor yang digunakan harus mampu mengalirkan arus diatas 120 mA.
Karena semakin berkembangnya teknologi terintegrasi maka transistor yang berfungsi khusus untuk mendriver sebuah beban yang terkontrol dan dapat untuk menangani/mengalirkan arus sebesar 500mA sudah tersedia di dalam sebuah rangkaian terintegrasi ULN2803.
ULN2803 adalah IC yang didalamnya merupakan susunan transistor yang terpasang secara darlington dan dapat menangani arus sebesar 500 mA,dan didalam ULN2803 ini terdapat delapan buah susunan darlington yang dapat bekerja secara individu sehingga beban yang dapat dipasang pada ULN2803 ini sebanyak 8 buah. hal ini sesuai diaplikasikan untuk men-driver dotmatriks yang dikendalikan oleh mikrokontroler.
Gambar dibawah memperlihatkan susunan rangkaian dari driver untuk dotmatriks dalam satu kolomnya. Pengambilan daya pada kolom diambil dari 74LS245 yang diteruskan oleh ULN2803 sehingga konfigurasi semacam ini tidak memberatkan beban arus bagi mikrokontroler dan mikrokontroler sebagai pengendali saja. 74LS245 selain sebagai pengunci dalam hal ini juga bertugas sebagai penyedia arus bagi satu titik pada susunan dotmatriks.
Gambar 2.12 Susunan Driver dan Kendali kolom dotmatriks
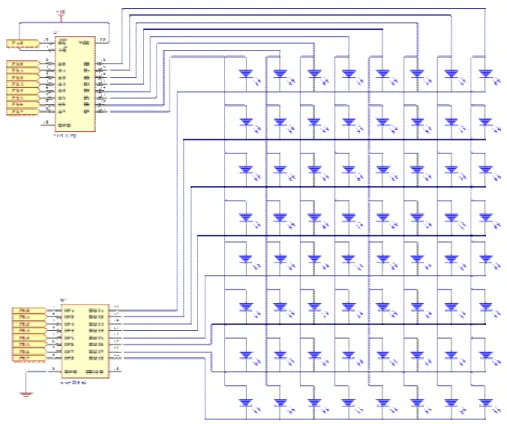
2.3.1 Persambungan Dotmatriks 8×8 titik 8 Buah
Dengan mengetahui karakteristik-karakteristik rangkaian yang diperlukan, maka dapat disusun menjadi rangkaian pengendali tampilan dotmatriks seperti
Gambar 2.13 Pengendali Dotmatriks 8×8 titik
Jalur Baris dihubungkan ke saluran antarmuka 8 Bit mikrokontroler yaitu Port.0, dengan melalui driver ULN2803 terlebih dahulu sebelum langsung terhubung ke mikrokontroler, begitu juga apabila digunakan 8 Buah dotmatriks, jalur baris semuanya dari 8 dotmatriks dihubungkan ke Port.0 ( dari P0.0 sampai P0.7).
Resistor yang dipasang pada setiap port.0 ini berfungsi sebagai pull up eksternal, dimana kaki port.0 ini sering digunakan sebagai pengakses memori eksternal, kaki port.0 ini tidak dilengkapi dengan pullup internal, sehingga untuk menghindari pengambangan logika maka diberi pull up eksternal pada setiap kaki port.0 ( dari P0.0 sampai P0.7).
Jalur kolom dihubungkan ke kaki IC pengunci/74xx245 pada sisi B dan pada kaki sisi A dihubungkan ke kaki mikrokontrol. Kedelapan dotmatriks
dipasang jalur seperti pada gambar diatas, dan pada sisi setiap kaki A 74XX245 dihubungkan ke mikrokontroler.
Pengendali jalur kolom ini yaitu 74xx245 dihubungkan ke kaki Port.2, pada kaki kontrol hal ini hanya memerlukan satu kontrol dari setiap do dotmatriks-nya, apabila digunakan 8 dotmatriks, maka diperlukan 8 antarmuka mikrokontroler.
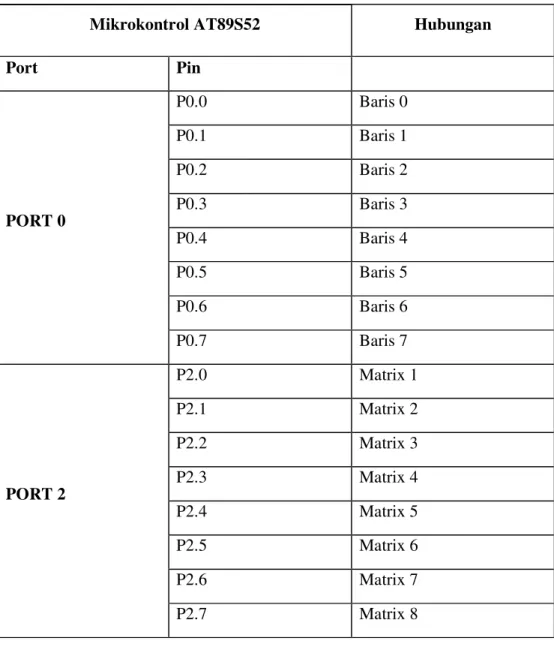
Untuk persambungan dapat dilihat pada Tabel
Tabel 2.2 Persambungan Mikrokontroler Dengan 8 buah Dotmatriks
Mikrokontrol AT89S52 Hubungan
Port Pin P0.0 Baris 0 P0.1 Baris 1 P0.2 Baris 2 P0.3 Baris 3 P0.4 Baris 4 P0.5 Baris 5 P0.6 Baris 6 PORT 0 P0.7 Baris 7 P2.0 Matrix 1 P2.1 Matrix 2 P2.2 Matrix 3 P2.3 Matrix 4 P2.4 Matrix 5 P2.5 Matrix 6 P2.6 Matrix 7 PORT 2
P3.0 A 0 P3.1 A 1 P3.2 A 2 P3.3 A 3 P3.4 A 4 P3.5 A 5 P3.6 A 6 PORT 3 P3.7 A 7
Gambar dibawah memperlihatkan sistem persambungan antara mikrkontroler dengan setiap pengunci(74LS245), ULN2803 dan dotmatrik, maka terlihat bahwa mikrokontroler masih tersedia antarmuka yang masih belum terpakai sebanyak delapan antarmuka. Apabila sistem dotmatriks ini akan dikembangkan lebih lanjut maka dotmatriks yang dapat dipasangkan dalam satu mikrokontroler dapat mencapai 16 buah dotmatriks.
Untuk lebih jelasnya dalam persambungan ini dapat diperjelas lagi pada Tabel 3.3 sampai Tabel .
Tabel 2.3 Persambungan Mikrokontroler dengan Setiap Dotmatriks Mikrokontrol P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2.0 Matrix Aktif 1 1 1 1 1 1 1 0 Matrix 1 1 1 1 1 1 1 0 1 Matrix 2 1 1 1 1 1 0 1 1 Matrix 3 1 1 1 1 0 1 1 1 Matrix 4 1 1 1 0 1 1 1 1 Matrix 5 1 1 0 1 1 1 1 1 Matrix 6 1 0 1 1 1 1 1 1 Matrix 7 0 1 1 1 1 1 1 1 Matrix 8
Tabel 2.4 Persambungan Mikrokontroler dengan Setiap kolom Dotmatriks Mikrokontrol P3.7 P3.6 P3.5 P3.4 P3.3 P3.2 P3.1 P3.0 Kolom Aktif 1 1 1 1 1 1 1 0 Kolom 1 1 1 1 1 1 1 0 1 Kolom 2 1 1 1 1 1 0 1 1 Kolom 3 1 1 1 1 0 1 1 1 Kolom 4 1 1 1 0 1 1 1 1 Kolom 5 1 1 0 1 1 1 1 1 Kolom 6 1 0 1 1 1 1 1 1 Kolom 7 0 1 1 1 1 1 1 1 Kolom 8
Tabel 2.5 Persambungan Mikrokontroler dengan Setiap Baris Dotmatriks Mikrokontrol P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0 Baris Aktif 0 0 0 0 0 0 0 1 Baris 1 0 0 0 0 0 0 1 0 Baris 2 0 0 0 0 0 1 0 0 Baris 3 0 0 0 0 1 0 0 0 Baris 4 0 0 0 1 0 0 0 0 Baris 5 0 0 1 0 0 0 0 0 Baris 6 0 1 0 0 0 0 0 0 Baris 7 1 0 0 0 0 0 0 0 Baris 8
2.3.2 Rancangan Perangkat Lunak
Untuk dapat menjalankan atau mengendalikan 8 buah dotmatriks adalah dengan menentukan mode scanning yang akan digunakan. Dalam aplikasi ini diambil mode scanning horizontal, seperti Gambar:
Gambar 2.15 Mode Scanning Horisontal
Data karakter led terletak pada jalur baris atau port.0, dan scanning atau pergeseran karakter perkolomnya dikendalikan oleh Port.3 dan Port.2. gambaran flowchart-nya diberikan pada Gambar.
Gambar 2.16 Flowchart scanning
Pada kondisi awal P2 diisi logika 8 bit ‘ 01111111 ‘, hal ini menjadikan dotmatriks 1 akan aktif dan dotmatriks lainya akan mati, selanjutnya P3 diisi logika 8 bit ‘011111111’ sehingga kolom yang ditunjuk aktif adalah kolom 1 dari dotmatriks 1.
Dari proses ini led dotmatriks 1 pada kolom 1 akan hidup sesuai dengan data karakter yang dikeluarkan oleh P0, (logika 1 = hidup, logika 0 = mati), data karakter pada P0 akan dibahas pada karakter kode ASCII.
Selanjutnya setelah kolom pertama aktif dan P0 memberikan karakter kolom pertama, maka isi logika P3 akan digeser kekanan 1 bit, sehingga P3 akan berlogika ‘1011111111’, hal ini menunjuk aktif led pada kolom kedua, dan kemudian P0 mengeluarkan karakter berikutnya pada kolom 2.
Setelah proses kedua, maka proses diulang kembali dan menggeser logika P3 menjadi ‘11011111’ dan P0 sama dengan karakter ketiga. Hal ini akan
berulang-ulang terus sampai P3 berlogika ‘11111110’, apabila P3 berlogika ‘11111110’ maka proses scanning horizontal selesai pada dotmatriks 1. untuk dotmatriks 2 adalah dengan menggeser logika pada ‘10111111’, dan P2 dikembalikan lagi pada posisi logika ‘01111111’, Berarti yang sekarang aktif adalah dotmatriks 2 pada posisi kolom 1, selanjutnya proses seperti diatas diulang kembali sampai pada dotmatriks ke delapan. Gambaran pergeseran logika dapat dilihat pada tabel selanjutnya……
2.4 Relay
Relay adalah suatu peralatan elektronik yang berfungsi untuk memutuskan atau menghubungkan suatu rangkaian elektronik yang satu dengan rangkaian elektronik yang lainnya, contoh pada rangkaian pengontrol motor mengunakan relay. Pada dasarnya relay adalah saklar elektromagnetik yang akan bekerja apabila arus mengalir melalui kumparan, inti besi akan menjadi magnet dan akan menarik kontak-kontak relay. Kontak-kontak dapat ditarik apabila garis magnet dapat mengalahkan gaya pegas yang melawannya. Besarnya gaya magnet yang ditetapkan oleh medan yang ada pada celah udara pada jangkar dan inti magnet, dan banyaknya lilitan kumparan, kuat arus yang mengalir atau disebut dengan inperal lilitan dan pelawan magnet yang berada pada sirkuit pemagnetan. Untuk memperbesar kuat medan magnet dibentuk suatu sirkuit. Kontak-kontak atau kutub-kutub dari relay umumnya memiliki tiga dasar pemakaian yaitu : 1. Bila kumparan dialiri arus listrik maka kontaknya akan menutup dan
2. Bila kumparan dialiri arus listrik maka kontaknya akan membuka dan disebut dengan kontak Normally Close ( NC ).
3. Tukar-sambung ( Change Over/CO ), relay jenis ini mempunyai kontak tengah yang normalnya tertutup tetapi melepaskan diri dari posisi ini dan membuat kontak dengan yang lain bila relay dialiri listrik.
Berikut ini memperlihatkan beberapa bentuk kontak dari sebuah relay :
Gambar 2.17 Jenis Konstruksi Relay Sifat – sifat relay :
a. Impedansi kumparan, biasanya impedansi ditentukan oleh tebal kawat yang digunakan serta banyaknya lilitan. Biasanya impedansi berharga 1 – 50 K? guna memperoleh daya hantar yang baik.
b. Kuat arus yang digunakan untuk menggerakkan relay, biasanya arus ini diberikan oleh pabrik. Relay dengan perlawanan kecil memerlukan arus besar sedangkan relay dengan perlawanan besar memerlukan arus yang kecil.
c. Tegangan yang diperlukan untuk menggerakkan relay.
d. Daya yang diperlukan untuk mengoperasikan relay besarnya sama dengan nilai tegangan dikalikan arus.
e. Banyaknya kontak-kontak jangkar dapat membuka dan menutup lebih dari satu kontak sekaligus tergantung pada kontak dan jenis relaynya. Jarak antara kontak-kontak menentukan besarnya tegangan maksimum yang diizinkan antara kontak tersebut.
2.5 Protokol USB
2.5.1 Persinyalan USB
USB adalah host-centric bus di mana host/terminal induk memulai semua transaksi. Paket pertama/penanda (token) awal dihasilkan oleh host untuk menjelaskan apakah paket yang mengikutinya akan dibaca atau ditulis dan apa tujuan dari perangkat dan titik akhir. Paket berikutnya adalah data paket yang diikuti oleh handshaking packet yang melaporkan apakah data atau penanda sudah diterima dengan baik atau pun titik akhir gagal menerima data dengan baik. Setiap proses transaksi pada USB terdiri atas:
• Paket token/sinyal penanda (Header yang menjelaskan data yang mengikutinya)
• Pilihan paket data (termasuk tingkat muatan) dan
• Status paket (untuk acknowledge/pemberitahuan hasil transaksi dan untuk koreksi kesalahan)
Penetapan kaki Kaki Fungsi 1 VBUS (4.75–5.25 V) 2 D− 3 D+ 4 GND Shell Shield
2.5.2 Paket data umum USB
Data di bus USB disalurkan dengan cara mendahulukan Least Significant Bit(LSB). Paket-paket USB terdiri dari data-data berikut ini:
• Sync
Semua paket harus diawali dengan data sync. Sync adalah data 8 bit untuk low dan full speed atau data 32 bit untuk high speed yang digunakan untuk mensinkronkan clock dari penerima dengan pemancar. Dua bit terakhir mengindikasikan dimana data PID dimulai.
• PID (Packet Identity/Identitas paket)
Adalah field untuk menandakan tipe dari paket yang sedang dikirim. Tabel dibawah ini menunjukkan nilai-nilai PID:
Group Nilai PID Identitas Paket Token 0001 OUT Token Token 1001 IN Token Token 0101 SOF Token Token 1101 SETUP Token Data 0011 DATA0 Data 1011 DATA1
Data 0111 DATA2 Data 1111 MDATA
Handshake 0010 ACK Handshake Handshake 1010 NAK Handshake Handshake 1110 STALL Handshake Handshake 0110 NYET (No Response Yet) Special 1100 PREamble
Special 1100 ERR Special 1000 Split Special 0100 Ping
Tabel 2.6 Nilai PID
Ada 4 bit PID data, supaya yakin diterima dengan benar, 4 bit di komplementasikan dan diulang, menjadikan 8 bit data PID. Hasil dari pengaturan tersebut adalah sebagai berikut.
PID0 PID1 PID2 PID3 nPID0 nPID1 nPID2 nPID3 • ADDR (address)
Bagian alamat dari peralatan dimana paket digunakan. Dengan lebar 7 bit, 127 peralatan dapat disambungkan. Alamat 0 tidak sah, peralatan yang belum terdaftar harus merespon paket yang dikirim ke alamat 0.
• ENDP (End point)
Titik akhir dari field yang terdiri dari 4 bit, menjadikan 16 kemungkinan titik akhir. Low speed devices, hanya dapat mempunyai 2 tambahan end point pada puncak dari pipe default. (maksimal 4 endpoints)
• CRC
Cyclic Redundancy Check dijalankan pada data didalam paket yang dikirim. Semua penanda (token) paket mempunyai sebuah 5 bit CRC ketika paket data mempunyai sebuah 16 bit CRC.
• EOP (End of packet)
Akhir dari paket yang disinyalkan dengan satu angka akhir 0 (Single Ended Zero/SEO) untuk kira-kira 2 kali bit diikuti oleh sebuah J 1 kali.
Data yang dikirim dalam bus USB adalah salah satu dari 4 bentuk, yaitu control, interrupt, bulk, atau isochronous.
2.5.3 Perancangan peralatan yang menggunakan USB
Untuk membuat suatu peralatan yang dapat berkomunikasi dengan protokol USB tidak perlu harus mengetahui secara rinci protokol USB. Bahkan kadang tidak perlu pengetahuan tentang USB protokol sama sekali. Pengetahuan tentang USB protokol hanya diperlukan untuk mengetahui spesifikasi yang dibutuhkan untuk alat kita. Pada kenyataannya untuk mengimplemetasikan USB protokol di FPGA ataupun perangkat bantu lain sangat tidak efisien dan banyak waktu terbuang untuk merancangnya. Menggunakan kontroler USB sangat lebih dianjurkan dalam membuat alat yang dapat berkomunikasi melalui protokol ini. Kontroler USB mempunyai banyak macam bentuk, dari microcontroller berbasis 8051 yang mempunyai input output USB secara langsung sampai pengubah protocol dari serial seperti I2C bus ke USB.
USB controller biasanya dijual dengan disertai berbagai fasilitas yang mempermudah pengembangan alat, diantaranya manual yang lengkap, driver
untuk windows, contoh code aplikasi untuk mengakses USB, contoh code untuk USB controller, dan skema rangkaian elektronikanya.
Dalam sisi pengembangan software aplikasi dalam personal computer, komunikasi antar hardware didalam perangkat keras USB tidak terlalu diperhatikan karena Windows ataupun sistem operasi lain yang akan mengurusnya. Pengembang perangkat lunak hanya memberikan data yang akan dikirim ke alat USB di buffer penyimpan dan membaca data dari alat USB dari buffer pembaca. Untuk driver pun kadang-kadang Windows sudah menyediakannya, kecuali untuk peralatan yang mempunyai spesifikasi khusus kita harus membuatnya sendiri.
2.6 Konsep Komunikasi serial pada Komputer
Komunikasi serial ialah pengiriman data secara serial (data dikirim satu persatu secara berurutan), sehingga komunikasi serial jauh lebih lambat daripada komunikasi paralel.. Serial port lebih sulit ditangani karena peralatan yang dihubungkan ke serial port harus berkomunikasi dengan menggunakan transmisi serial, sedang data di computer diolah secara paralel. Oleh karena itu data dari dan ke serial port harus dikonversikan ke dan dari bentuk paralel untuk bisa digunakan. Menggunakan hardware, hal ini bisa dilakukan oleh Universal Asyncronous Receiver Transmimeter (UART), kelemahannya kita butuh software yang menangani register UART yang cukup rumit dibanding pada parallel port.Kelebihan dari komunikasi serial ialah panjang kabel jauh dibanding paralel, karena serial port mengirimkan logika “1” dengan kisaran tegangan –3 V hingga – 25 V dan logika 0 sebagai +3 Volt hingga +25 V sehingga kehilangan daya
karena panjangnya kabel bukan masalah utama. Bandingkan dengan port paralel yang menggunakan level TTL berkisar dari 0 V untuk logika 0 dan +5 Volt untuk logika 1. Berikut contoh bentuk sinyal komunikasi serial . Umumnya sinyal serial diawali dengan start bit, data bit dan sebagai pengecekan data menggunakan parity bit serta ditutup dengan 2 stop bit. Level tengangan -3 V hingga +3 V dianggap sebagai undetermined region.
Komunikasi melalui serial port adalah asinkron, yakni sinyal detak tidak dikirim bersama dengan data. Setiap word disinkronkan dengan start bit, dan sebuah clock internal di kedua sisi menjaga bagian data saat pewaktuan (timing).
2.6.1 Peralatan Komunikasi Serial
Hardware pada komunikasi serial port dibagi menjadi 2 (dua ) kelompok yaitu Data Communication Equipment (DCE) dan Data Terminal Equipment (DTE). Contoh dari DCE ialah modem, plotter, scanner dan lain lain sedangkan contoh dari DTE ialah terminal di komputer. Spesifikasi elektronik dari serial port merujuk pada Electronic Industry Association (EIA) :
1. “Space” (logika 0) ialah tegangan antara + 3 hingga +25 V.
2. “Mark” (logika 1) ialah tegangan antara –3 hingga –25 V.
3. Daerah antara + 3V hingga –3V tidak didefinisikan /tidak
terpakai
4. Tegangan open circuit tidak boleh melebihi 25 V.
Berikut tampilan port serial DB9 yang umum digunakan
Gambar 2.18 Port DB9 jantan
Gambar 2.19 Port DB9 betina
Konektor port serial terdiri dari 2 jenis, yaitu konektor 25 pin (DB25 dan 9 pin (DB9) yang berpasangan (jantan dan betina).Bentuk dari konektor DB-25 sama persis dengan port paralel.
2.6.2 Alamat Port dan IRQ
Alamat standar serial port adalah sebagaimana tampak dalam Tabel 12.2. Hal ini masih dengan catatan bahwa mungkin ada komputer yang memiliki alamat port dan IRQ yang berbeda dengan alarnat di bawah ini, misalnya pada komputer PS/2 yang menggunakan Micro Channel Bus.
Nama Alamat IRQ
COM 1 3F8 4
COM 2 2F8 3
COM 3 3E8 4
COM 4 2E8 3
Tabel 2.7 Alamat dan IRQ port serial
2.6.3 Konverter Logika RS-232
Jika peralatan yang kita gunakan menggunakan logika TTL maka sinyal serial port harus kita konversikan dahulu ke pulsa TTL sebelum kita gunakan, dan sebaliknya sinyal dari peralatan kita harus dikonversikan ke logika RS-232 sebelum di-inputkan ke serial port. Konverter yang paling mudah digunakan adalah MAX-232. Di dalam IC ini terdapat Charge Pump yang akan membangkitkan +10 Volt dan -10 Volt dari sumber +5 Volt tunggal. Dalam IC DIP (Dual In-line Package) 16 pin (8 pin x 2 baris) ini terdapat 2 buah transmiter dan 2 receiver.
2.6.4 Pemrograman Port Serial Komputer
Port serial sering digunakan untuk interfacing komputer dan mikrokontroler, karena kemampuan jarak pengiriman data dibandingkan port paralel. Berikut contoh program assembly untuk komunikasi serial antara 2 PC. Untuk komunikasi ini, anda cukup menghubungkan :
1. Pin TxD ke pin RxD computer lain
2. Pin RXD dihubungkan ke pin TxD komputer lain
3. RTS dan CTS dihubung singkat
4. DSR dan DTR dihubung singkat