6
BAB II
LANDASAN TEORI
2.1 Training Tanda Tangan
Proses training tanda tangan merupakan bagian pendahulu dari proses verifikasi tanda tangan.
Menurut Srikanta (2012), proses verifikasi tanda tangan adalah proses untuk menguji tanda tangan secara detail untuk menentukan keabsahan kepemilikannya. Sebelum penggunaaan teknologi dalam proses verifikasi tanda tangan, masih diandalkan proses pengenalan tanda tangan secara manual, yang mana menuntut ketelitian dan kejujuran yang tinggi. Dengan bantuan teknologi, proses verifikasi menjadi efektif dan efisien, serta dapat mengurangi tingkat human error yang ada.
Beberapa algoritma yang telah dikembangkan demi kepentingan verifikasi tanda tangan, diantaranya:
● Wavelet Packet secara online (Romo, et al, 2009) ● HOG dan fitur LBP secara offline (Yilmaz, et al, 2011)
● kombinasi validasi Cross dan pendekatan Graph Matching secara offline (Bhole, et al, 2011)
2.2 Preprocessing Image
Tanda tangan hasil scan dari proses pengambilan data tadi.akan melalui berbagai proses preprocessing image (Rasheed,2012).
Preprocessing Image ini bertujuan untuk mengurangi variasi gambar yang akan ditraining. Untuk proses training tiap orang, diperlukan beberapa gambar tanda tangan, karenanya jumlah variasi tanda tangan yang semakin sedikit dapat meningkatkan tingkat keamanan verifikasi nantinya.
Preprocessing image terdiri dari banyak tahapan, diantaranya :
• Binarization
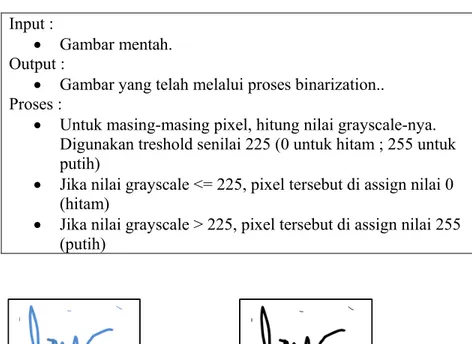
Proses untuk mengubah warna gambar dari hasil scanner menjadi hitam-putih. Hal ini untuk mengantisipasi, jika tanda tangan tidak dituliskan dengan tinta hitam. Bertujuan untuk memudahkan proses komputasi selanjutnya.
Input :
• Gambar mentah. Output :
• Gambar yang telah melalui proses binarization.. Proses :
• Untuk masing-masing pixel, hitung nilai grayscale-nya. Digunakan treshold senilai 225 (0 untuk hitam ; 255 untuk putih)
• Jika nilai grayscale <= 225, pixel tersebut di assign nilai 0 (hitam)
• Jika nilai grayscale > 225, pixel tersebut di assign nilai 255 (putih)
Gambar 2.1 Penampakan gambar sebelum dan sesudah tahapan Binarization. (Rasheed,2012)
• Noise R Me noise, noise y ialah al Inp Ou Pro Gambar • Image Pen gambar diguna Removal eskipun sud tetap diperl yang masih lgoritma Ima put : • Gambar utput : • Gambar oses : • Untuk m dari pix tersebut • fˆ
( )
x,y merupa yang be untuk p xy S . r 2.2 Penamp Scaling nyesuaian uk r, gambar kan: dah menggu lukan prose terekam pa age Median r hasil binar r yang telah masing-masi xel-pixel yan t (neighbour ( ){g
median xy S t s, ∈ = akan fungsi u erada di posi pixel yang be pakan gamba Removal. kuran gamb tidak men unakan sca es noise rem ada gambar. Filter 3x3. rization difilter. ing pixel, hitg bersebelah rhood).
( )}
st g , , dima untuk mengh isi s,t. Ruang erada di posi ar sebelum d (Rasheed,20 ar diperluka ngalami pem anner untuk moval untuk Algoritma tung median han langsung ana fungsi g( hitung gray l g lingkup ne si x,y didefin dan sesudah 012) an agar saat motongan. A k meminim k menghilan yang digun n gray level g dengan pix (s,t)level dari pix ighbourhood nisikan pada tahapan Noi dilakukan r Algoritma malisir ngkan nakan xel xel d a ise rotasi yang
Ga • I ta Input : • H • W Output : • ne • ne Proses : • sc • sc • sc • ne • ne Fungsi m nilai min ambar 2.3 Pe Image Centra Proses in angan tidak Input : • G Output : • G bi Proses : • X Height = ting Width = lebar ewHeight = ewWidth = l caleHeight = caleWidth = caleAll = mi ewHeight = ewWidth = s minimum(sca imum antara enampakan g Sca alization ni juga bertu mengalami Gambar hasil Gambar deng idang gamba Xmin = posis gi gambar r gambar tinggi gamb lebar gamba = 250 / Heigh 250 / Width inimum(scal scaleAll * H scaleAll * W aleHeight,sca a scaleHeigh gambar sebe aling. (Rashe ujuan untuk m perbedaan d proses Imag gan posisi titi
ar.
si pixel hitam
bar hasil pros ar hasil prose ht h eHeight,scal Height Width aleWidth) un ht dan scaleW
elum dan ses eed,2012)
memastikan dari yang seb
ge Scaling ik pusat gam m paling kiri ses Image Sc es Image Sca leWidth) ntuk menent Width. sudah tahapa n hasil rotasi benarnya. mbar berada d caling aling tukan an Image i dari tanda di tengah
Gambar • Image Set sebaga proses dikomp horizon Inp Ou Pro • Xmax = • Ymin = • Ymax = • Height • Width = • Xadder • Yadder • Geser s dengan horizon • Geser s dengan yang lam 2.4 Penamp Rotation telah melalu i persiapan perotasian. P putasi selanj ntal. put : • Gambar utput : • Gambar bidang h oses : • Bagi ga = posisi pixe = posisi pixel = posisi pixe = tinggi gam = lebar gamb = ( (Width/2 = ( (Height/ eluruh pixel cara menjum ntal yang lam
eluruh pixel cara menjum ma dengan Y pakan gamba Centrlizatio ui proses Im Image Ro Proses ini be njutnya bers r hasil prose r dengan pos horizontal.. ambar menja el hitam palin l hitam palin el hitam palin mbar bar 2) – (Xmax-/2) – (Ymax gambar kek mlahkan kom ma dengan X gambar keb mlahkan kom Yadder. ar sebelum d n. (Rasheed mage Scaling otation, seka ertujuan untu ifat seragam es Image Cen sisi tanda tan
adi 8 bagian ng kanan ng atas ng bawah -Xmin)/2 - X x-Ymin)/2 - Y kanan sebany mponen posi Xadder. bawah seban mponen posi dan sesudah t ,2012) g dan Imag arang gamb uk memastik m, dan relat ntralization ngan relatif r secara vertik Xmin ) Ymin ) yak Xadder, isi pixel nyak Yadder,
isi pixel vert
tahapan Ima ge Centraliza bar siap me kan gambar tif “rata” se rata terhadap
kal, lalu tand , tikal age ation elalui yang ecara p dai
Ga ba T ke • T di Gambar • A • A S • B • B S • A • B • X • Y • X • Y • H
t
• Pu ambar 2.6 Pe atas antara b Tandai juga b edelapan den Tentukan titik ibawah ini: 2.5 Pemberi A1 = posisi p A2 = posisi p 1 B1 = posisi p B2 = posisi p 2 Acenter = A2 Bcenter = B2 X_Acenter = Y_Acenter = X_Bcenter = Y_Bcenter = Hitung nilai s B X B Y _ _an
θ
=
utar gambar enampakan g Rota bagian pertam batas antara b ngan S2. k-titik A1, A ian posisi A1 ixel hitam p ixel hitam p ixel hitam p ixel hitam p 2-A1 -B1 posisi horiz posisi vertik posisi horizo posisi vertik sudutθ
deng Ac X Bcenter Ace Y Bcenter _ _ − − r berdasarkan gambar sebe ation. (Rash ma dan bagia bagian ketuj A2, B1, B2, s 1, A2, B1, d aling atas di aling bawah aling atas di aling bawah ontal Acente kal Acenter ontal Bcente kal Bcenter gan rumus center enter n sudutθ
elum dan ses heed,2012) an kedua den uh dan bagia seperti pada an B2 (Rash i sepanjang t h di sepanjan i sepanjang t h di sepanjan er er sudah tahapa ngan S1. an gambar heed,2012) tanda S1 ng tanda tanda S2 ng tanda an Image
Gamb
2.3
• Image Pro tanda t Inp Ou Pro bar 2.7 PenamBidirect
Bid Bart Kosk lainnya. M Memory (B kategori Su yaitu diciri Trimming oses ini dilaangan. put : • Gambar utput : • Gambar oses : • Xmin = • Xmax = • Ymin = • Ymax = • Salin ul (Xmin, mpakan gam
tional Ass
directional A ko berdasark Menurut Yas BAM) merup upervised L ikan dengan akukan untu r hasil prose r tanpa space = posisi pixel = posisi pixe = posisi pixel = posisi pixe lang gambar Ymin) mene mbar sebelum (Rasheedsociative
Associative M kan studi terh Pal Singh pakan mode Learning Net adanya mek uk membuan es Image Rot e kosong dis l hitam palin el hitam palin l hitam palin el hitam palin r lama ke kan empati posis m dan sesuda d,2012)
e Memory
Memory pert rdahulu dan h, dkk (2009 el Neural Ne tworks seper kanisme trai ng area koso tation sekitar tanda ng kiri ng kanan ng atas ng bawah nvas baru, de si (0,0) ah tahapan Imy (BAM)
tama kali dip n model asso 9), Bidirecti etwork yang rti halnya B ining.ong dari gam
a tangan. engan pixel Image Trimm perkenalkan ociative mem ional Associ g termasuk d Backpropaga mbar ming. oleh mory iative dalam ation,
Bidirectional Associative Memory menggunakan 2 layer X dan Y yang saling berasosiasi. Layer-layer tersebut disimpan dalam matriks dua dimensi (Kosko, 1988).
Konsep dasar Bidirectional Associative Memory:
m pasang pola
{
(
X1,Y1) (
, X2,Y2) (
,..., Xm,Ym)
}
akan disimpulkandalam Bidirectional Associative Memory dimana Xi =
(
Xi1,Xi2,...,Xin)
dan Yi =(
Yi1,Yi2,...,Yin)
adalah 2 pola yang saling berasosiasi, maka m pola tersebut dapat disimpan dalam Bidirectional Associative Memory, dalam bentuk matriks bobot w berukuran n*p, yang disusun sebagai berikut :{ }
{ }
m i Y X Y X W p i n i m i i T i ,..., 2 , 1 1,1 1 , 1 1 =∈ − − ∈ =∑
=Jika m pasang pola telah disimpan dalam BAM w, maka pada saat diperlukan, dapat dipanggil (retrieved, recalled, decoded), sbb :
. .
Fungsi threshold-nya didefinisikan dengan
, ,
, . , .
2.4 Backpropagation Neural Network
Menurut Mohammed Waadalla, dkk (2014), Neural Network merupakan kumpulan neuron yang saling terhubung melalui garis dengan
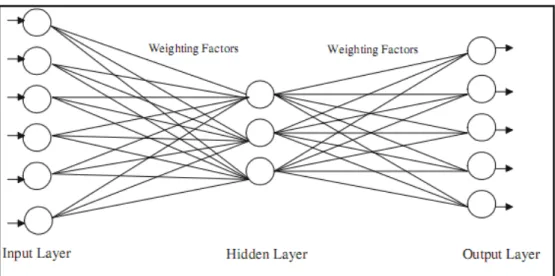
bobot masing-masing. Bobot-bobot tersebut terus diperbaharui didalam proses oleh fungsi matematis. Sedangkan menurut Nader Salari, dkk (2014), Backpropagation Neural Network merupakan salah satu metode paling efisien untuk menyelesaikan permasalahan yang kompleks. Karena Backpropagation Neural Network dapat memecahkan permasalahan kompleks tersebut ke struktur-struktur yang lebih sederhana dan tersusun bersebelahan dengan tidak kehilangan deskripsi dari sistem kompleks yang sebelumnya. Backpropagation Neural Network adalah neural network dengan konsep multilayer feedforward yang terdiri dari lapisan input, lapisan tersembunyi, dan lapisan output. (Cao Jianfang, 2014)
Backpropagation adalah salah satu metode yang sering digunakan untuk training sebuah Neural Network. Backpropagation terdiri dari 2 langkah:
• Feedforward (langkah maju) – digunakan saat training dan verifikasi • Backward (langkah mundur) – digunakan saat training, untuk
Gambar 2.8 Diagram posisi layer input, hidden, output pada Backpropagation Neural Network
Algoritma Training Backpropagation
Langkah 0 : Inisialisasi bobot.
Langkah 1 : Selama kondisi berhenti false, lakukan langkah 2-9 Langkah 2 : Untuk setiap pasangan data latihan, lakukan langkah 3-8 Feedforward (langkah maju)
Langkah 3 : Setiap unit input , 1,2, … , menerima sinyal input dan meneruskan sinyal tersebut ke semua unit pada lapisan diatasnya (hidden layer).
Langkah 4 : Setiap unit tersembunyi , 1,2, … , menjumlahkan sinyal-sinyal input terbobot,
_
Gunakan fungsi aktivasi untuk menghitung sinyal outputnya,
Dan kiriman sinyal tersebut ke semua unit di lapisan atasnya (unit-unit output).
Langkah 5 : Setiap unit output , 1,2, … , menjumlahkan sinyal-sinyal input terbobot,
_
Gunakan fungsi aktivasi untuk menghitung sinyal outputnya,
_
Backward (langkah mundur)
Langkah 6 : Tiap-tiap unit output , 1,2, … , menerima pola target yang berhubungan dengan pola input pembelajaran, hitung informasi errornya,
. _ )
Hitung koreksi bobot (yang nantinya akan digunakan untuk memperbaiki nilai ),
∆ . .
Hitung juga koreksi bias (yang nantinya akan digunakan untuk memperbaiki nilai ),
∆ .
dan kirimkan nilai ke unit-unit yang ada dilapisan bawahnya.
Langkah 7 : Tiap-tiap hidden unit , 1,2, … , menjumlahkan delta inputnya (dari unit yang berada pada lapisan atasnya.),
_
Kalikan nilai ini dengan turunan dari fungsi aktivasinya untuk menghitung informasi errornya,
_ . _
Kemudian hitung koreksi bobot (yang nantinya digunakan untuk memperbaiki nilai ),
∆ . .
Hitung juga koreksi bias (yang nantinya digunakan untuk memperbaiki nilai ),
∆ .
Perbaikan bobot dan bias ;
Langkah 8 : Setiap unit output , 1,2, … , memperbaiki bobot dan biasnya 0,1,2, … , ,
∆
Setiap unit tersembunyi , 1,2, … , memperbaiki bobot dan biasnya 0,1,2, … , ,
∆
Langkah 9 : Tes kondisi berhenti.
Algoritma Implementasi Back Propagation
Langkah 0 : Inisialisasi bobot (dari hasil algoritma training) Langkah 1 : Selama kondisi berhenti false, lakukan langkah 2-4 Hanya bagian Feedforward (langkah maju):
Langkah 2 : Setiap unit input , 1,2, … , menerima sinyal input dan meneruskan sinyal tersebut ke semua unit pada lapisan diatasnya (hidden layer).
Langkah 4 : Setiap unit tersembunyi , 1,2, … , menjumlahkan sinyal-sinyal input terbobot,
_
Gunakan fungsi aktivasi untuk menghitung sinyal outputnya,
_
Dan kiriman sinyal tersebut ke semua unit di lapisan atasnya (unit-unit output).
Langkah 5 : Setiap unit output , 1,2, … , menjumlahkan sinyal-sinyal input terbobot,
_
Gunakan fungsi aktivasi untuk menghitung sinyal outputnya,
_
2.5 Literature Review
Untuk kepentingan pelaksanaan penelitian ini, penulis terinsipirasi dari banyak penelitian terdahulu yang telah dilakukan dengan melibatkan metode pengenalan pola Bidirectional Associative Memory dan metode pelatihan Backpropagation Neural Network dalam proses verifikasi tanda tangan digital. Penelitian-penelitian tersebut tertuang dalam bentuk jurnal
dan buku. Penelitian-penelitian ini menginspirasi penulis dalam bentuk sejarah penggunaan algoritma Bidirectional Associative Memory dan Backpropagation Neural Network dan bagaimana melakukan image processing terhadap gambar tanda tangan..
Pada tahun 2009, Singh, Yash Pal, et al dengan paper berjudul Bi Directional Associative Memory Neural Network Method in the Character Recognition memaparkan hasil research penulis, dalam melakukan pengenalan karakter, dengan metode Backpropagation Neural Network yang digabung dengan metode Bidirectional Associative Memory. Dari jurnal ini, penulis mendapat algoritma Bi Directional Associative Memory untuk digunakan untu keperluan pengenalan pola..
Pada Januari 2012, Pansare, Ashwini dengan paper berjudul Handwritten Signature Verification using Neural Network memaparkan hasil research penulis, dalam melakukan verifikasi tanda tangan dengan menggunakan Neural Network. Dari jurnal ini, penulis mendapat penjelasan bagaimana menghitung perbandingan jumlah pixel hitam terhadap jumlah keseluruhan pixel.
Pada tahun 2009, Das, M.T dan Dulger, L.C dengan paper berjudul Signature Verification (SV) Toolbox: Application of PSO-NN memaparkan hasil research penulis, dalam melakukan verifikasi tanda tangan dengan menggunakan perpaduan Particle Swarm Optimization dan Neural Network. Dari jurnal ini, penulis mendapat penjelasan bagaimana membagi tanda tangan menjadi beberapa region.
Pada tahun 2012, Rasheed, Nada Abdullah dengan paper berjudul Proposed Preprocessing Algorithm for Signature Recognition memaparkan hasil research penulis, dalam melakukan image preprocessing untuk keperluan pengenalan tanda tangan. Dari jurnal ini, penulis mendapat algoritma untuk melakukan image preprocessing gambar sebagai salah satu langkah dalam tahapan pemurnian data.
Pada tahun 2010, Rusell, Stuart Jonathan dan Norvig, Peter dengan buku yang berjudul Artificial Intelligence : a Modern Approach memaparkan tentang Neural Network. Dari buku ini didapatkan informasi dasar mengenai Neural Network, dimana salah satu pembahasannya tentang proses training dari metode Backpropagation Neural Network.
Kontribusi penelitian-penelitian tersebut penulis rangkum dalam tabel 2.1 seperti yang dapat dilihat di halaman selanjutnya.