PERAMALAN DENGAN MODEL ARCH SKRIPSI
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Sains (S.Si)
Program Studi Matematika
Oleh: SUHARTINI NIM : 003114038
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SANATA DHARMA YOGYAKARTA
MOTTO
Serahkanlah perbuatanmu kepada Tuhan, maka terlaksanalah segala
rencanamu. (Amsal 16:3).
Do not dwell in the past, do not dream of the future, concentrate the mind on the
present moment. ( Budha )
Our greatest glory is not in never falling, but in rising every time we fall. (Budha).
Dengan penuh kasih karya ini kupersembahkan untuk : Bapak dan Ibukku,
Mas Arno, mas Ardi, mbak yanti, wandi, “bee”, all family,
ABSTRAK
Model ARCH (Autoregressive Conditional Heteroscedastic) merupakan model autoregresif dalam keadaan variansi tidak konstan. Model ini akan diguna-kan untuk menentudiguna-kan, meramaldiguna-kan dan memperbaharui nilai parameter dari data runtun waktu yang variansinya tidak konstan. Nilai parameter dari model ARCH dapat diperoleh dengan menggunakan metode maksimum likelihood.
ABSTRACT
ARCH (Autoregressive Conditional Heteroscedastic) model is inconstant vari-ance autoregressive model. Varivari-ance is a variable in statistic that illustrate how far the changes of the data to mean. This model will be used to fit, to forecast, and to update renew parameter from inconstant variance of time series data. ARCH model parameter value can be obtained by using likelihood maximum method.
KATA PENGANTAR
Puji dan syukur kepada Hati kudus Tuhan Yesus dan bunda Maria, karena berkat karunia dan rahmatnya yang telah mereka berikan penulis dapat menyele-saikan skripsi ini.
Banyak hambatan dan kesulitan yang ditemui penulis dalam menyusun dan menulis skripsi ini. Namun, berkat bantuan dan dorongan dari berbagai pihak, baik langsung maupun tidak langsung, akhirnya skripsi ini dapat terselesaikan. Oleh karena itu penulis ingin mengucapkan terima kasih kepada :
1. Ibu Ch. Enny Murwaningtyas, S.Si, M.Si , selaku dosen pembimbing yang telah meluangkan waktu, pikiran, memimjamkan buku, serta kesabaran membimbing penulis dalam menyusun skripsi ini.
2. Bapak YG. Hartono, S.Si, M.Sc, selaku ketua program studi mate-matika FMIPA USD Yogyakarta.
3. Ibu Mv. Any Herawati, S.Si, M.Si, selaku dosen pembimbing akademik.
4. Bapak Ir. Ig. Aris Dwiatmoko, M.Sc dan Ibu Lusia Krismiyati Budi-asih, S.Si, M.Si, selaku dosen penguji yang telah memberikan masu-kan-masukan dan koreksi.
5. Bapak dan ibu dosen FMIPA yang telah memberikan ilmu yang ber-guna kepada penulis selama dibangku kuliah.
6. Bapak Gunardi, S.Si, M.Si, yang telah memberikan judul skripsi dan masukan-masukan.
7. Mas Tukijo yang telah memberikan pelayanan administrasi dalam
urusan-urusan perkuliahan kepada penulis.
8. Kedua orangtuaku yang tak henti-hentinya memberikan dukungan
baik moral, spiritual, maupun materi sehingga penulis dapat
menye-lesaikan skripsi ini.
9. Kakak-kakakku, mas Ardi, mas Arno dan adiku yang selalu
mem-berikan dukungan, doa, bantuan materi serta kesabarnya selama ini.
10.Keluarga mbak Yanti dan keponakan-keponakanku Angela, Jepin
yang selalu memberi semangat, doa, bantuan materi.
11.Teman-temanku Sumi, Vin, Dora, Dewi, Deni, Veri (’01), Anjrah,
Heri (Ndoet), yang selalu setia menemani, memberikan semangat
dan mendengarkan curhatku.
Penulis menyadari bahwa skripsi ini masih jauh dari sempurna, oleh karena
itu penulis membuka diri untuk menerima kritik serta saran yang bermanfaat bagi
kesempurnaan skripsi ini. Penulis berharap semoga skripsi ini memberikan
man-faat dan berguna bagi semua pihak.
Yogyakarta, 22 Februari 2007
DAFTAR ISI
Halaman
HALAMAN JUDUL... i
HALAMAN PERSETUJUAN PEMBIMBING ... ii
HALAMAN PENGESAHAN... iii
HALAMAN PERSEMBAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
ABSTRAK ... vi
ABSTRACT... vii
KATA PENGANTAR ... viii
DAFTAR ISI... x
BAB I PENDAHULUAN... 1
A. Latar Belakang Masalah... 1
B. Rumusan Masalah ... 2 C. Tujuan Penulisan... 2 D. Pembatasan Masalah ... 2 E. Manfaat Penulisan... 3 F. Metode Penulisan ... 3 G. Sistematika Penulisan ... 3
BAB II LANDASAN TEORI... 5
A. Konsep Dasar Runtun Waktu... 11
B. Fungsi Autokovariansi dan Fungsi Autokorelasi... 15
D. Autoregresi (AR)... 19
BAB III MODEL ARCH... 32
A. ARCH... 32
B. Pengujian Adanya Efek ARCH Dalam Data Runtun Waktu 41 C. Fungsi Kelihood ARCH... 47
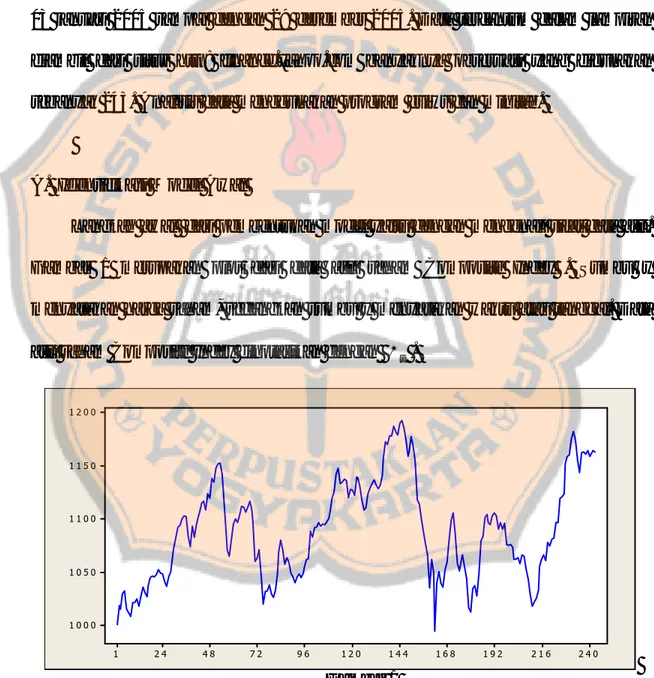
BAB IV PENERAPAN MODEL ARCH PADA DATA HARGA SAHAM COMPOSITE INDEX... 53
A. Identifikasi Model ARCH ... 53
B. Uji Efek ARCH ... 57
C. Pembentukan Model Akhir ... 58
BAB V PENUTUP... 60
A. Simpulan ... 60
B. Saran... 60
DAFTAR PUSTAKA ... 61
LAMPIRAN... LAMPIRAN 1 Data Harga Saham Composite Index dari tanggal 03 Januari 2005 sampai 29 Desem-ber 2005... 62
LAMPIRAN 2 Hasil Analisa Data yang Telah Didifferenc-ing Satu Kali dengan Menggunakan AR (3) .. 66
LAMPIRAN 3 Hasil Analisa Data yang Telah Didifferenc-ing Satu Kali dengan Menggunakan AR (1) .. 67
LAMPIRAN 5 Hasil Analisis Penentuan Modal Akhir... 69
LAMPIRAN 6 Tabel Distribusi Statistik-t ... 70
BAB I
PENDAHULUAN
A. Latar Belakang Masalah
Pada kenyataannya data runtun waktu tidak semuanya memiliki variansi kon-stan. Model Autoregresif (AR) merupakan model yang menganggap bahwa data run-tun waktu memiliki variansi yang konstan. Variansi merupakan variabel dalam statistik yang menggambarkan seberapa jauh perubahan data terhadap nilai rata-ratanya. Persamaan umum AR adalah
t k t k t t =β +β Υ + +β Υ +ε Υ 0 1 −1 K − dengan :
Υt = deret waktu tunggal
=
Υt−i deret waktu tunggal yang ketinggalan i perioda
(
i=1,2,3,K,k)
β = parameterε = galat
Bila variansi galat berubah terhadap waktu maka keadaan ini disebut heteroskedastisitas. Untuk itulah Robert F. Engle pada tahun 1982 menawarkan model ARCH (Autoregressive Conditional Heteroscedastic). Model ARCH merupakan model autoregresif dalam keadaan variansi tidak konstan.
Bentuk model ARCH adalah t t t =v h ε dengan
∑
∞ = − + = 1 2 0 i i t i th α α ε dan vt berdistribusi normal standar.
Peramalan dengan model ARCH dapat kita lakukan cukup dengan adanya data runtun waktu tunggal. Peramalan dengan model ini tidak perlu memandang aspek-aspek lain yang dapat mempengaruhi perubahan data runtun waktu.
B. Rumusan Masalah
Pokok bahasan yang akan dibahas dalam tulisan ini dapat dirumuskan sebagai berikut:
1. Apa yang dimaksud dengan model ARCH?
2. Bagaimana penerapan model ARCH dalam peramalan dengan menggunakan data runtun waktu?
C. Tujuan Penulisan
Untuk menjelaskan dan membahas kegunaan model ARCH dalam peramalan data runtun waktu serta landasan teori yang mendukungnya.
D. Pembatasan Masalah
Dalam tulisan ini peramalan dengan model ARCH hanya akan membahas
2. Uji efek ARCH menggunakan pengganda langrange (langrange
multiplier).
3. Estimasi model ARCH menggunakan maksimum likelihood distibusi normal.
4. Pembuktian distribusi khi-kuadrat tidak dibuktikan.
E. Manfaat Penulisan
Manfaat yang akan diperoleh setelah mempelajari topik ini adalah untuk semakin memahami dan menguasai penggunaan model ARCH dalam peramalan khususnya peramalan dengan menggunakan data runtun waktu.
F. Metode Penulisan
Metode yang digunakan dalam penulisan ini menggunakan metode kepustakaan dan data diolah menggunakan software Eviws dan Minitab.
G. Sistematika Penulisan
BAB I : menjelaskan tentang latar belakang masalah, rumusan masalah, tujuan penu-lisan, manfaat penupenu-lisan, sistematika penulisan.
BAB II : menjelaskan tentang konsep dasar runtun waktu, fungsi autokovariansi dan fungsi autokorelasi (ACF), fungsi parsial autokorelasi (PACF), autoregresi (AR).
BAB III : menjelaskan tentang model ARCH, ARCH, pengujian adanya efek ARCH dalam data runtun waktu, fungsi likelihood ARCH.
BAB IV : menjelaskan Penerapan Model ARCH Pada Data Harga Saham Composite
Index, identifikasi model awal, uji efek ARCH, penentuan model akhir.
BAB II
LANDASAN TEORI
Dalam peramalan dikenal adanya model deret berkala dan model regresi. Pada jenis model deret berkala, penduga masa depan dilakukan berdasarkan nilai masa lalu dari suatu variabel atau kesalahan masa lalu. Sedangkan model regresi mengasumsikan bahwa faktor yang diramalkan menunjukkan suatu hubungan sebab-akibat dengan satu atau lebih variabel bebas (variabel independen).
Suatu model regresi yang memiliki satu variabel bebas disebut model regresi sederhana atau model regresi linear klasik. Model regresi linear klasik dapat dinyatakan sebagai berikut:
(2.1) 1 0 i i i =β +β Χ +ε Υ dengan: stokastik gangguan unsur parameter ) independen (variabel bebas variabel dependen) (variabel bebas tak variabel = = = Χ = Υ ε β
Model tersebut memiliki beberapa asumsi yaitu:
Asumsi 1:
Asumsi 2:
Tidak adanya autokorelasi atau tidak terdapat korelasi diantara unsur gangguan sto-kastik, yaitu
(
)
(
(
( )
)
(
( )
)
)
(
)
(
)
(
)
( )
0 0 0 , = Ε = − − Ε = Ε − Ε − Ε = j i j i j j i i j i Kov ε ε ε ε ε ε ε ε ε εdengan i dan j adalah indeks untuk dua pengamatan yang berbeda.
Asumsi 3:
Varian εi adalah suatu bilangan konstan positif yang sama dengan σ2 dengan kata lain asumsi ini menyatakan homoskedastisitas atau variansi sama, yaitu:
( )
(
( )
)
( )
2 2 2 σ ε ε ε ε = Ε = Ε − Ε = i i i i VarPenyimpangan dari asumsi 3 disebut sebagai heteroskedastisitas (variansi yang tidak konstan), yaitu:
( )
2 i i Var ε =σ Asumsi 4:Untuk menaksir parameterβ digunakan metode kuadrat terkecil biasa ( method
of ordinary least squares (OLS) ). Langkah –langkahnya sebagai beriku :
Persamaan (2.1) dapat ditulis menjadi
(2.2) ˆ ˆ ˆ 1 0 i i i i i ε ε β β + Υ = + Χ + = Υ
dengan Υˆi merupakan nilai taksiran Υi. Secara alternatif persamaan (2.2) dapat din-yatakan sebagai berikut
(2.3) ˆ ˆ ˆ 1 0 i i i i i Χ − − Υ = Υ − Υ = β β ε
yang menunjukkan bahwa εi (galat) hanyalah perbedaan antara nilai Υ sebenarnya dengan yang ditaksir. Untuk sampel berukuran N pasang observasi jumlah kuadrat galatnya dapat dinyatakan sebagai berikut
(
)
(
ˆ ˆ)
(2.4) ˆ 2 1 0 2 2∑
∑
∑
Χ − − Υ = Υ − Υ = i i i i i β β εBila persamaan (2.4) diturunkan terhadap βˆ0 maka diperoleh persamaan
(
)
(
)
(2.5) 0 ˆ ˆ 2 ˆ 0 1 0 2∑
∑
=− Υ − − Χ = ∂ ∂ i i i β β β εBila persamaan (2.4) diturunkan terhadap βˆ1 maka diperoleh persamaan
(
)
(
)
(2.6) 0 ˆ ˆ 2 ˆ 0 1 0 2∑
∑
=− Υ − − Χ Χ = ∂ ∂ i i i i β β β εPersamaan (2.5) dapat ditulis menjadi (2.7) ˆ ˆ 1 0
∑
∑
Υi =Nβ +β ΧiPersamaan (2.6) dapat ditulis menjadi
(2.8) ˆ ˆ 2 1 0
∑
∑
∑
ΥiΧi =β Χi+β ΧiDari persamaan (2.7) dan (2.8) diperoleh
(
)
(2.9) ˆ 2 2 1∑
∑
∑
∑ ∑
Χ − Χ Υ Χ − Υ Χ = i i i i i i N N β(
)
(2.10) ˆ 2 2 2 0∑
∑
∑ ∑
∑ ∑
Χ − Χ Υ Χ Χ − Υ Χ = i i i i i i i N βSelain menaksir parameter β kita tentukan koefisien determinasi R2. Koefisien determinasi merupakan ukuran ikhtisar yang menyatakan seberapa baik garis regresi sampel mencocokkan data. Bila persamaan (2.2) kedua sisi dikurangi Υ maka per-samaannya menjadi (2.11) ˆ i i i −Υ =Υ −Υ+ε Υ
Kemudian persamaan (2.11) kedua sisi dikuadratkan sehingga persamaannya menjadi
(
)
2(
ˆ)
2 2(
ˆ)
∑
2 (2.12)∑
Υi −Υ =∑
Υi −Υ +∑
Υi −Υεi + εiKarena persamaan (2.5)
∑
εi =0 dan persamaan (2.6)∑
εiΧi =0 maka(
)
(
)
(2.13) 0 ˆ ˆ ˆ ˆ ˆ 1 0 1 0 = Υ − Χ + = Υ − Χ + = Υ − Υ∑
∑
∑
∑
∑
i i i i i i i i ε ε β ε β ε β β εSehingga persamaan (2.12) menjadi
(
)
2(
ˆ)
2 2 (2.14)∑
∑
Υi −Υ =∑
Υi −Υ +ε
i dengan(
)
∑
Υ −Υ 2i = jumlah kuadrat total ( total sum of squares (TSS) )
(
)
∑
Υˆi −Υ 2 = jumlah kuadrat yang dijelaskan ( explined sum of squares (ESS) )∑
2i
ε = jumlah kuadrat galat/residual ( residual sum of squares (RSS) )
Definisi 2.1:
Koefisien determinasi R2 didefinisikan sebagai
(
)
(
)
∑
∑
Υ − Υ Υ − Υ = = 2 2 2 ˆ i i TSS ESS R Teorema 2.1 Bila(
)
(
)
∑
∑
Υ −Υ Υ − Υ = 2 2 2 ˆ i i NTR dengan T merupakan banyaknya observasi maka
sta-sistik uji TR2 akan berdistribusi khi-kuadrat. Bukti :
Karena Υˆi merupakan nilai taksiran
i
( )
(
)
2 2 1 ˆ ˆ S n Var i i − = Υ − Υ = Υ∑
sedangkan( )
(
)
2 2 σ = Υ − Υ = Υ∑
N Var i i akibatnya(
)
(
)
(
)
(
)
22 2 2 2 2 2 1 1 ˆ σ σ S n N S n N N TR i i − = − = Υ − Υ Υ − Υ =∑
∑
Jadi terbukti bahwa TR2 berdistribusi χ2 dengan derajat bebas n-1. ■
Sedangkan model regresi yang memiliki lebih dari satu variabel bebas disebut mode regresi linear berganda. Model regresi linear berganda dapat dinyatakan sebagai berikut: (2.15) ... 2 2 1 1 0 i i k ki i i =β +β Χ +β Χ + +β Χ +ε Υ dengan: parameter bebas variabel bebas tak variabel = = Χ = Υ β
1,2,3,...) (i i, -ke observasi i stokastik gangguan unsur = = = ε
Model tersebut memiliki asumsi yang sama dengan asumsi pada model regresi linear klasik. Sedangkan untuk menaksir parameter β juga menggunakan metode OLS.
A. Konsep Dasar Runtun Waktu
Suatu runtun waktu (deret waktu/deret berkala) adalah sekumpulan observasi yang berurutan dalam waktu tertentu. Suatu runtun waktu dinotasikan dengan Υt dengan t menunjuk pada perioda waktu yang berturutan. Bila t adalah bilangan asli maka Υt merupakan runtun waktu diskrit. Bila t sembarang bilangan real maka Υt merupakan runtun waktu kontinu.
Dilihat dari sejarah nilai observasi, runtun waktu dapat dibedakan atas runtun waktu deterministik dan runtun waktu stokastik. Runtun waktu deterministik adalah runtun waktu dengan nilai observasi mendatang dapat dihitung atau diramalkan se-cara pasti melalui suatu fungsi berdasarkan nilai observasi yang lampau. Sedangkan runtun waktu stokastik adalah runtun waktu yang nilai observasi mendatang hanya menunjukkan struktur probabilistik yang digambarkan melalui fungsi tertentu ber-dasarkan observasi yang lampau. Contoh runtun waktu deterministik Υt =cos
(
2πft)
dengan Υt merupakan nilai observasi pada saat t. Sedangkan f merupakan fre-kuensi yang nilainya dapat ditentukan dengan
N
panga-matan). Contoh runtun waktu stokastik adalah ada Nobservasi yang nilainya dapat ditentukan sebagai Υ1,Υ2,Υ3,K,Υn dengan Υ1,Υ2,Υ3,K,Υn merupakan variabel-variabel random yang memiliki fungsi probabilitas.
Suatu runtun waktu disebut stasioner bila a. Ε
( )
Υt =konstan untuk setiapt b. Var( )
Υt =konstan untuk setiaptc. Kov
(
Υt,Υt−k)
=konstan untuk setiaptdan Kov(
Υt,Υt−k)
dependen terhadap lag kDengan demikian, suatu runtun waktu dikatakan stasioner bila rata-rata, variansi, dan kovariansinya tetap konstan sepanjang waktu. Sedangkan runtun waktu dikatakan tidak stasioner bila runtun waktu tersebut gagal memenuhi satu bagian atau lebih dari syarat tersebut. Untuk mencapai asumsi stasioneritas, data yang belum stasioner harus diubah menjadi stasioner. Hal itu dapat diatasi melalui metode pembedaan (differencing).
Misal diketahui deret angka sebagai berikut : 2,4,6,8,K,20 yang mengandung trend linear dan tidak bersifat acak. Dengan mengurangkan nilai-nilai yang berurutan , 4-2, 6-4, 8-6, ... ,20-18, kita akan mendapatkan nilai-nilai pembedaan pertama (first
differeneces) yang merupakan deret angka 2,2,2,...,2 dan deret ini jelas stasioner. Jadi
untuk mendapatkan kestasioneran dapat dibuat deret baru yang terdiri dari perbedaan angka antara periode yang berturut-turut:
(2.16) 1 − Υ − Υ = Υ′t t t
Deret baru Υ′t, akan mempunyai n−1 buah nilai dan akan stasioner apabila trend dari data awal Υt adalah linear (pada orde pertama).
Apabila autokorelasi dari data yang dibedakan pertama tidak mendekati nol sesudah lag kedua atau ketiga, berarti data belum bisa dikatakan stasioner. Oleh karena itu perlu dilakukan pembedaan lagi dari data pembedaan pertama sebagai berikut:
(2.17)Υ ′′t =Υ′t −Υ′t−1
t
Υ ′′ dinyatakan sebagai deret pembedaan orde kedua (second order differences). Deret ini akan mempunyai n−2 buah nilai. Dengan mensubstitusikan (2.16) ke dalam (2.17) akan diperoleh:
(
) (
)
2 1 2 1 1 2 − − − − − Υ + Υ − Υ = Υ ′′ Υ − Υ − Υ − Υ = Υ ′′ t t t t t t t t tBarisan
{ }
εt merupakan proses white noise bila untuk setiap periode waktu tmaka berlaku
I. Ε
( )
εt =0untuk setiaptII. Ε
( )
εt2 =σ2 untuk setiaptTeorema 2.2
Bila εt white noise maka εt stasioner. Bukti:
Pertama karena Ε
( )
εt =0 dan 0 suatu konstanta maka syarat pertama stasioner dipenuhi.Kedua karena Ε
( )
εt =0 dan Ε( )
ε2 =σ2t maka
( )
(
( )
)
(
)
( )
2 2 2 2 0 σ ε ε ε ε ε = Ε = − Ε = Ε − Ε = t t t t t VarYang berarti syarat kedua stasioner dipenuhi.
Ketiga karena Ε
( )
εt =0untuk setiapt dan Ε(
εtεs)
=0untuk setiapt≠s maka(
)
(
(
( )
)
(
( )
)
)
(
)(
)
(
)
(
)
0 0 0 , = Ε = − − Ε = Ε − Ε − Ε = − − − − − k t t k t t k t k t t t k t t Kov ε ε ε ε ε ε ε ε ε εYang berarti syarat ketiga stasioner dipenuhi.
Jadi terbukti bahwa εt stasioner. ■
B. Fungsi Autokovariansi dan Fungsi Autokorelasi (ACF)
Definisi 2.2:
Autokovariansi antara Υt dan Υt−kdidefinisikan sebagai
(
t, t k)
(
(
t( )
t)
(
t k(
t k)
)
)
k (2.18)Kov Υ Υ− =Ε Υ −Ε Υ Υ− −Ε Υ− =γ
Teorema 2.3
Bila Υt runtun waktu stasioner maka γ0 =Var
( )
Υt dan γk =γ−k. Bukti:(
)
( )
(
)
(
( )
)
(
)
( )
(
)
( )
t t t t t t t t t Var Kov Υ = Υ Ε − Υ Ε = Υ Ε − Υ Υ Ε − Υ Ε = Υ Υ = , 2 0 γdengan mengingat syarat ketiga stasioner sehingga
(
)
(
,)
, k t t k t t k Kov Kov + − Υ Υ = Υ Υ = γ =γ−k ■Fungsi autokovariansi merupakan plot dari γk terhadap lag k.
Fungsi korelasi digunakan untuk mengetahui sejauh mana hubungan antara satu kelompok data dengan satu kelompok data lainnya. Sedangkan fungsi autokorelasi
merupakan perkembangan lebih lanjut dari fungsi korelasi. Fungsi autokorelasi digunakan untuk mengetahui apakah suatu data pada waktu tertentu dipengaruhi oleh data pada waktu sebelumnya dan juga digunakan untuk mengetahui apakah suatu data stasioner atau tidak stasioner. Stasioneritas sangat diperlukan karena untuk mempermudah melakukan peramalan.
Definisi 2.3 :
Didalam runtun waktu korelasi antara Υt dan Υt−k disebut autokorelasi bila
(
)
(
)
( ) (
)
( )
(
)
(
(
)
)
(
)
( )
(
)
(
)
(
(
(
)
)
)
(2.19) , , 2 2 k t k t t t k t k t t t k t t k t t k t t Var Var Kov Korr − − − − − − − Υ Ε − Υ Ε Υ Ε − Υ Ε Υ Ε − Υ Υ Ε − Υ Ε = Υ Υ Υ Υ = Υ ΥKarena syarat kedua stasioner dan sifat pertama autokovariansi persamaan (2.19) menjadi
(
)
(
(
( )
)
(
(
)
)
)
( )
(
)
(2.20) , 0 2 k k t t k t k t t t k t t Korr ρ γ γ = = Υ Ε − Υ Ε Υ Ε − Υ Υ Ε − Υ Ε = Υ Υ − − −Teorema 2.4
Bila Υt runtun waktu stasioner maka ρ0 =1 dan ρk =ρ−k. Bukti: 1 0 0 0 =γ = γ ρ
Menggunakan Teorema 2.3 maka diperoleh
0 0 γ γ γ γ ρ k k k = = − = ρ−k ■
Fungsi autokorelasi merupakan plot dari ρk terhadap lag k.
Dalam praktek kita bisa menggunakan autokorelasi sampel, dengan mengasumsikan Υt stasioner sehingga Υ =Υt =Υt−1 dan Var
( )
Υt =Var(
Υt−k)
sebagai berikut:(
)
( ) (
)
(
)(
)
(
)
1 1 , 1 2 1 − Υ − Υ − Υ −Υ Υ −Υ = Υ Υ Υ Υ =∑
∑
= + = − − − n n Var Var Kov n t t n k t k t t k t t k t t k ρ(
)(
)
(
)
(2.21) 1 2 1∑
∑
= + = − Υ − Υ Υ − Υ Υ − Υ = n t t n k t t t k k ρC. Fungsi Autokorelasi Parsial (PACF)
Fungsi autokorelasi parsial (PACF) digunakan untuk menunjukkan keeratan hubungan antara Υt dan Υt−k.
Definisi 2.4 :
Autokorelasi parsial didefinisikan sebagai berikut: ( ) ( ) (2.22) k k kk Μ Η = φ
dengan Μ( )k dan Η( )k adalah matriks autokorelasi k×k, yaitu
( ) = Μ − − − − − − 1 1 1 1 3 2 1 3 1 2 2 1 1 1 2 1 L M M M M M L L L k k k k k k k ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ
Sedangkan Η( )k adalah Μ( )k yang kolom terakhirnya diganti k ρ ρ ρ M 2 1 dapat ditulis menjadi
( ) = Η − − − k k k k k ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ L M M M M M L L L 3 2 1 3 1 2 2 1 1 1 2 1 1 1 1
Untuk memperoleh φkkdengan k =1,2,3,K digunakan aturan Cramer akan diperoleh
2 1 2 2 2 2 1 3 2 1 2 1 3 1 2 2 1 3 1 2 1 1 2 1 3 1 2 2 1 1 1 33 2 1 2 1 2 1 1 2 1 1 22 1 11 2 2 1 2 1 1 1 1 1 , 3 1 1 1 1 , 2 , 1 ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ φ ρ ρ ρ ρ ρ ρ ρ ρ φ ρ φ − − + − − + + = = = − − = = = = = k k k D. Autoregresif (AR)
Model Autoregresif memiliki persamaan umum sebagai berikut:
(2.23) ... 2 2 1 1 0 t t k t k t t =φ +φ Υ +φ Υ + +φ Υ +ε Υ − − −
Persamaan (2.23) juga merupakan persamaan regresi, tetapi berbeda dengan persamaan (2.15). Pada persamaan (2.15) variabel-variabel sebelah kanan merupakan faktor-faktor bebas yang lain, sedangkan pada persamaan (2.23) variabel-variabel sebelah kanan merupakan nilai sebelumnya dari variabel tak bebas Υt.
Asumsi-asumsi pada persamaan regresi juga berlaku pada persamaan tersebut denganεt merupakan white noise.
Bila persamaan (2.23) variabel sebelah kanan hanya dipengaruhi oleh nilai sebelumnya dari variabel tak bebas Υt yang ketinggalan satu perioda maka persamaannya disebut autoregresif orde satu (AR (1)). Persamaan AR (1) adalah
(2.24) 1 1 0 t t t =φ +φ Υ +ε Υ −
Bila Υt diketahui maka akan diperoleh
(
)
(
)
2 0 1 1 2 1 1 0 2 1 0 1 0 1 0 2 1 1 0 2 1 0 1 0 1 1 ε ε φ φ φ φ ε ε φ φ φ φ ε φ φ ε φ φ + + Υ + + = + + Υ + + = + Υ + = Υ + Υ + = Υ(
)
(
)
(
)
M 1 1 3 2 1 1 2 1 0 3 1 2 1 1 0 3 2 1 1 2 1 0 3 1 2 1 0 1 0 0 3 2 1 1 0 2 1 1 0 1 0 3 2 1 0 3 ε ε φ ε φ φ φ φ φ ε ε φ ε φ φ φ φ φ φ φ ε ε ε φ φ φ φ φ φ ε φ φ + + + Υ + + + = + + + Υ + + + = + + + Υ + + + = + Υ + = Υ(
)
( ) ( ) ( ) n (n n) n n n n n n n n n n n n n n − − − − − − − − − − − − − + + + + + Υ + + + + + = Υ ε φ ε φ ε φ ε φ φ φ φ φ φ 1 3 3 1 2 2 1 1 1 1 0 1 1 1 2 1 1 0 1 K KSehingga untuk setiap 0t〉 akan didapatkan
(2.25) 1 0 1 0 1 1 0 1 0
∑
∑
− = − − = + Υ + = Υ t i i t i t t i i t φ φ φ φ εNilai harapan Υt pada persamaan (2.25) dapat dicari dengan mengingat syarat pertama white noise adalah
( )
(
)
(2.26) 0 1 1 0 1 0 1 0 1 0 1 1 0 1 0 1 0 1 0 1 1 0 1 0 Υ + = Ε + Υ Ε + Ε = + Υ + Ε = Υ Ε∑
∑
∑
∑
∑
− = − = − − = − = − − = t t i i t i i t i t t i i t i t i i t t i i t φ φ φ ε φ φ φ φ ε φ φ φ φSedangkan nilai harapan dari Υt−k dengan mengingat syarat pertama white noise
adalah
(
)
(
)
(2.27) 0 1 1 0 1 0 1 0 1 0 1 1 0 1 0 1 0 1 0 1 0 1 1 0 Υ + = Ε + Υ Ε + Ε = + Υ + Ε = Υ Ε − − − = − − = − − − − − = − − = − − = − − − −∑
∑
∑
∑
∑
k t k t i i k t i i k t i k t k t i i k t i k t i i k t i k t i k t φ φ φ ε φ φ φ φ ε φ φ φ φPersamaan (2.26) dan (2.27) keduanya dependen terhadap waktu. Karena
( )
Υt ≠Ε(
Υt−k)
Ε maka
{ }
Υt tidak stasioner.Teorema 2.5
bila φ1〈1 maka I. t−k
1
II.
(
1 3 ...)
1 2 1 1 0 1 0 1 0∑
= + + + + − − = φ φ φ φ φ φ t k i i konvergen ke 1 1 φ φ − o (2.29) Bukti:I. Karena φ1〈1 maka lim 1− =0
∞ → k t t φ II. Karena
(
1 3 ...)
1 2 1 1 0 1 0 1 0∑
= + + + + − − = φ φ φ φ φ φ t k ii merupakan deret geometri yang
konvergen dengan a=φ0dan r=φ1 maka
1 0 1 1 φ φ − = −r a ■
Jadi untuk
(
t→∞)
dan φ1〈1,( )
(2.30) 1 lim lim 0 1 1 0 1 0 1 0 1 1 0 1 0∑
∑
∑
∞ = − − = − − = ∞ → ∞ → + − = + Υ + = Υ i t i i t i t i i t t i i t t t ε φ φ φ ε φ φ φ φNilai harapan Υt dengan menggunakan persamaan (2.30) dan mengingat syarat pertama white noise adalah
( )
(2.31) 1 1 1 1 0 0 1 1 0 0 1 1 0 φ φ ε φ φ φ ε φ φ φ − = Ε + − Ε = + − Ε = Υ Ε∑
∑
∞ = − ∞ = − i i t i i i t i tTerlihat bahwa rata-rata dari Υt berhingga dan independen terhadap waktu. Jadi
( ) (
)
untuk semua . 1 1 0 t k t t φ φ − = Υ Ε = Υ Ε −Nilai variansiΥt dengan menggunakan persamaan (2.30), (2.31) dan mengingat syarat kedua white noise adalah
( )
(
( )
)
( )
( )
( )
(2.32) 1 ... ... 1 1 2 1 2 2 4 1 2 2 1 2 2 2 4 1 2 1 2 1 2 2 0 1 2 1 0 0 1 1 0 2 φ σ σ φ σ φ σ ε φ ε φ ε ε φ φ φ ε φ φ φ − = + + + = + Ε + Ε + Ε = Ε = − − + − Ε = Υ Ε − Υ Ε = Υ − − ∞ = − ∞ = −∑
∑
t t t i t i i i i t i t t t Varyang juga berhingga dan independen terhadap waktu.
Nilai kovariansiΥt dengan mengingat persamaan (2.30), syarat kedua white noise dan persamaan (2.31) adalah
(
)
(
(
( )
)
(
(
)
)
)
Ε = − − + − − − + − Ε = Υ Ε − Υ Υ Ε − Υ Ε = Υ Υ∑
∑
∑
∑
∞ = − − ∞ = − ∞ = − − ∞ = − − − − 0 1 0 1 0 1 0 1 1 0 0 1 0 1 1 0 1 1 1 1 , i i k t i i i t i i i k t i i i t i k t k t t t k t t Kov ε φ ε φ φ φ ε φ φ φ φ φ ε φ φ φ(
)
(
(
)
(
))
( )
(
)
(
)
(
K)
K K K + Ε + Ε + Ε = + + + + + + + + + + + Ε = Υ Υ − − + − − + − − − + − − − − − − − − + − − − − 2 2 4 1 2 1 2 1 2 1 1 2 1 1 2 1 2 2 1 1 1 1 1 1 1 2 2 1 1 1 , k t k k t k k t k k t k k t k k t k t k t k t k k t k t t t k t t Kov ε φ ε φ ε φ ε φ ε φ ε φ ε φ ε ε φ ε φ ε φ ε φ ε(
)
(2.33) 1 1 2 1 1 2 4 1 2 1 1 2 φ φ σ φ φ φ σ − = + + + = k k KTernyata nilai kovariansinya berhingga dan tidak berubah terhadap waktu. Jadi bila nilai limit (2.30) digunakan maka deret
{ }
Υt akan menjadi stasioner.Fungsi Autokorelasi (ACF) untuk AR (1) dapat dicari dengan menggunakan persamaan (2.32) dan (2.33) sebagai berikut
(
)
(
)
(
)
(
)
2 1 2 1 2 2 1 2 2 1 0 2 2 1 2 1 2 2 1 2 1 0 1 1 0 0 0 1 1 2 1 1 1 1 0 untuk φ φ σ φ σ φ γ γ ρ φ φ σ φ σ φ γ γ ρ γ γ ρ = − − = = = = − − = = = = = = k k k M(
)
(
)
n n n n n k 1 2 1 2 2 1 2 1 0 1 1 φ φ σ φ σ φ γ γ ρ = − − = = =Bila .0〈φ1〈1makaρk〉0untuk semuak Bila −1〈φ1〈0 maka akan berubah tanda ρk dari negatif ke positif untuk semua k ≥1.
Fungsi Autokorelasi Parsial (PACF) untuk AR (1) Untuk , 1 = k φ11 =ρ1 =φ1 , 2 = k 0 1 1 2 1 2 1 2 1 2 1 2 1 2 22 = − − = − − = φ φ φ ρ ρ ρ φ
Karena AR (1) persamaannya hanya berhubungan dengan Υt−1 maka untuk k≥2
nilai φkk bernilai nol. Secara umum dapat ditulis menjadi
≥ = 2 untuk 0 1 untuk 1 k k kk φ φ
Pada proses ini autokorelasi parsial bernilai tidak nol pada lag pertama, yang juga merupakan order dari proses, tetapi bernilai nol untuk lag yang lain.
Bila persamaan (2.23) variabel sebelah kanan hanya dipengaruhi oleh nilai sebelumnya dari variabel tak bebas Υt yang ketinggalan p perioda maka persamaannya disebut autoregresif orde p (AR (p)). Persamaan AR (p) adalah
(2.34) 1 0 t i t p i i t =φ + φ Υ +ε Υ − =
∑
Nilai harapanΥt persamaan (2.34) dengan mengingat syarat pertama white noise adalah
( )
( )
( )
t 1 0 1 0 ε φ φ ε φ φ Ε + Υ Ε + Ε = + Υ + Ε = Υ Ε∑
∑
= − = − p i i t i t p i i t i t (2.35) 1 0∑
= − Υ + = p i i t i φ φsedangkan nilai harapan Υt−k adalah
(
)
( )
( )
(2.36) 1 0 k t 1 0 1 0∑
∑
∑
= − − − = − − − = − − − Υ + = Ε + Υ Ε + Ε = + Υ + Ε = Υ Ε p i i t k i p i i k t i k t p i i t k i k t φ φ ε φ φ ε φ φPersamaan (2.35) dan (2.36) keduanya dependen terhadap waktu. Karena
( ) (
Υt ≠Ε Υt−k)
Ε maka
{ }
Υt tidak stasioner. Persamaan (2.34) dapat ditulis menjadi0 1 t p i i t i t − φ Υ =φ +ε Υ
∑
= − (2.37) 0 2 2 1 1 t t p t p t t −φ Υ −φ Υ − −φ Υ =φ +ε Υ − − K −Apabila persamaan (2.37) ditulis dalam bentuk operator pergeseran mundur dengan
i t t i
t p i i i t t p i i i t t t p p t t t B B B B B ε φ φ ε φ φ ε φ φ φ φ + = Υ + = Υ − Υ + = Υ − − Υ − Υ − Υ
∑
∑
= = 0 1 t 0 1 0 2 2 1 -1 K (2.38) 1 -1 1 0 1 0 t∑
∑
= = − + = Υ p i i t p i i iB φ B ε φ φ dengan 1 1 ≠∑
= p i i iB φ .Nilai harapan Υt persamaam (2.38) dengan mengingat syarat pertama white noise
adalah
( )
1 1 1 1 0 − + − Ε = Υ Ε∑
∑
= = p i i i t p i i i t B B φ ε φ φ (2.39) 1 1 1 1 0 1 1 0∑
∑
∑
= = = − = − Ε + − Ε = p i i i p i i i t p i i i B B B φ φ φ ε φ φNilai variansi Υt persamaam (2.38) dengan mengingat syarat kedua white noise adalah
( )
(
( )
)
2 1 0 1 1 0 2 1 1 1 − − − + − Ε = Υ Ε − Υ Ε = Υ∑
∑
∑
= = = p i i i p i i i t p i i i t t t B B B Var φ φ φ ε φ φ (2.40) 1 1 2 1 2 2 1 2 − = − Ε =∑
∑
= = p i i i p i i i t B B φ σ φ εNilai kovariansi
(
Υt,Υt−k)
dengan mengingat syarat ketiga white noise adalah(
t t k)
(
(
t( )
t)
(
t k(
t k)
)
)
Kov Υ ,Υ− =Ε Υ −Ε Υ Υ− −Ε Υ− − − − + − − − − + − Ε =∑
∑
∑
∑
∑
∑
= = − = = = = p i i i p i i i k t p i i i p i i i p i i i t p i i i B B B B B B 1 0 1 1 0 1 0 1 1 0 1 1 1 1 1 1 φ φ φ ε φ φ φ φ φ ε φ φ(
)
− − Ε = Υ Υ∑
∑
= − = − p i i i k t p i i i t k t t B B Kov 1 1 1 1 , φ ε φ ε (2.41) 0 1 2 1 = − Ε =∑
= − p i i i k t t B φ ε εJadi autoregresi orde p merupakan runtun waktu yang stasioner.
Bila persamaan (2.34) dikalikan Υt−k dengan 0k〉 maka persamaannya menjadi (2.42) 1 1 0 t k t t k p t p t k t t k k t tΥ− = Υ− + Υ−Υ− + + Υ− Υ− + Υ− Υ φ φ K φ ε
dan dengan mengambil nilai harapannya diperoleh
(
ΥtΥt−k)
= 0Ε(
Υt−k)
+ 1Ε(
Υt−1Υt−k)
+ + pΕ(
Υt−pΥt−k)
+Ε(
tΥt−k)
(2.43)Ε φ φ K φ ε
Persamaan (2.43) menurut definisi 2.2 dan dengan menggunakan persamaan (2.39) serta syarat ketiga white noise dapat ditulis menjadi
(2.44) 1 1 1 1 2 0 p k p k p i i i k B − − = + + + − =
∑
φ φγ φ γ φ γ KBila persamaan (2.44) dibagi γ0 maka diperoleh fungsi autokorelasi AR (p) sebagai berikut (2.45) 1 1 1 2 1 2 0 p k p k p i i i k B − − = + + + − =
∑
φ ρ φ ρ σ φ φ ρ KPersamaan (2.45) merupakan persamaan yule-walker. 2 1 1 2 1 2 0 1 1 1 2 1 2 1 2 0 1 1 1 1 1, k untuk φ ρ φ φ σ φ φ ρ ρ φ ρ φ φ σ φ φ ρ − + + + − = + + + + − = = − = − =
∑
∑
p p p i i i p p p i i i B B K K M K 2 2 1 1 2 1 2 0 2 1 2, k = + + + + − − = =∑
p p p i i iB ρ φ φ ρ φ σ φ φ ρ p p p p i i i p B p φ ρ φ ρ φ σ φ φ ρ + + + + − = =∑
= − − K 2 2 1 1 2 1 2 0 1 , kFungsi Autokorelasi Parsial (PACF) untuk AR (p)
2 1 1 2 1 2 0 1 11 1 1 1, k untuk φ ρ φ φ σ φ φ ρ φ − + + + − = = = − =
∑
p p p i i iB K M1 1 1 1 1 , 3 2 1 2 1 1 1 2 1 3 2 1 2 1 1 1 2 1 L M L M M M L L L M M M M M L L − − − − − − − − = = p p p p p p p p p pp p k ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ ρ φ . untuk , 0 k p kk = 〉 φ
Autokorelasi parsial akan nol setelah lag p atau kurva akan terputus setelah suku
BAB III
MODEL ARCH
A. ARCH
Autoregressive Conditional Heteroscedastic (ARCH) merupakan model
autoregresif dalam keadaan variansi tidak konstan. Masalah yang dihadapi ketika berhadapan dengan data runtun waktu adalah masalah variabilitas, yang menentukan seberapa cepat data berubah menurut waktu. Variabilitas menjadi bagian sangat penting ketika sebuah sistem lebih bersifat stokastik dari pada deterministik. Dalam sistem stokastik sendiri juga masih dibedakan antara data runtun waktu dengan variabilitas konstan atau variabilitas tidak konstan. Suatu besaran yang dapat mengukur variabilitas adalah variansi. Variansi mengukur harapan seberapa besar nilai suatu data runtun waktu berbeda terhadap rata-rata data keseluruhan.
Engle (1982) menunjukkan bahwa model runtun waktu, rata-rata dan variansinya dapat dicari secara bersamaan. Dengan manunjukkan bahwa ramalan bersyarat lenih unggul dari pada yang tidak bersyarat. Sebagai contoh, kita miliki AR(1) (3.1) 1 1 0 t t t =φ +φ Υ +ε Υ −
dan ingin meramalkan Υt+1 yaitu ramalan satu langkah kedepan. Ramalan bersyarat
(
Υ+1 Υ) (
=Ε 0 + 1Υ + +1)
Ε t t φ φ t εt( ) (
) ( )
(3.2) 1 0 1 1 0 t t t Υ + = Ε + Υ Ε + Ε = + φ φ ε φ φSedangkan bila digunakan ramalan tak bersyarat dengan memperhatikan persamaan (2.16) maka nilai harapan adalah
( )
(3.3) 1 1 0 1 φ φ − = Υ Ε t+Bila kita gunakan rata-rata bersyarat (3.2) untuk mencari nilai variansi bersyarat, akan diperoleh
(
)
[
(
)
]
[
]
[
]
( )
2 1 2 1 0 1 1 0 2 1 0 1 2 1 1 1 + + + + + + Ε = Υ − − + Υ + Ε = Υ − − Υ Ε = Υ Υ Ε − Υ Ε = Υ Υ t t t t t t t t t t t Var ε φ φ ε φ φ φ φ karena Ε( )
εt =0 maka( ) ( )
(
( )
)
( )
(3.4) 2 1 2 1 2 1 2 1 σ ε ε ε ε = = Ε − Ε = Ε + + + + t t t t VarSedangkan bila digunakan ramalan tak bersyarat dengan memperhatikan persamaan (2.11) maka variansi tidak bersyarat dari
( )
(3.5) 1 2 1 2 1 φ σ − = Υt+ VarBila 1 1 1 maka 1 0 2 1 1〈 − ≥ 〈 φ
φ sehingga ramalan tidak bersyarat mempunyai variansi
yang lebih besar, dengan alasan inilah ramalan bersyarat lebih digemari. Bila variansi bersyarat Υt dependen terhadap waktu maka disebut heteroskedastisitas.
Suatu pendekatan menggambarkan kuadrat dari εt dapat ditulis dalam proses AR (1) sebagai berikut (3.6) 2 1 1 0 2 t t t =α +α ε − +u ε
Dengan ut merupakan white noise baru,α0〉0 dan α1 ≥0.
Persamaan (3.6) merupakan pesamaan Autoregressive Conditional
Heteroscedastic orde 1 (ARCH (1)). Sebagai alternatif persamaan (3.6), dapat
dinyatakan dalam bentuk multiplikatif yang diusulkan Engle (1982) sebagai berikut (3.7) t t t =v h ε dengan 2 1 1 0 + − = t t
h α α ε dan vt berdisribusi normal standar. Bila persamaan (3.7) kedua sisi dikuadratkan dan 2
t
ε menggunakan persamaan (3.6) maka persamaannya menjadi
(
2 1)
2 − = + = t t t t t t t v h u u h v hBerikut ini beberapa sifat yang dimiliki oleh model ARCH (1): a. Nilai harapan εt sama dengan nol.
Sifat tersebut dapat dibuktikan dengan menggunakan persamaan (3.9), sehingga akan diperoleh nilai harapan galat sebagai berikut
( )
(
)
( )
(
)
(
)
0 0 2 1 1 0 2 1 1 0 2 1 1 0 t = + Ε = + Ε Ε = + Ε = Ε − − − t t t t t v v ε α α ε α α ε α α εb. Bila α1〈1 maka galat
( )
εt mempunyai variansi tidak bersyarat yang konstan. Sifat tersebut dapat dibuktikan dengan( )
(
( )
)
2 t t t Var ε =Εε −Εε( )
2 =Εεt( )(
)
(
)
( ) (
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
2)
3 2 2 2 1 3 1 2 2 2 1 2 1 0 2 1 1 0 0 2 3 1 0 2 2 2 1 2 1 2 1 1 0 0 2 2 2 1 2 1 2 1 1 0 0 2 2 1 0 2 1 1 0 2 1 1 0 2 1 1 0 2 2 1 1 0 2 1 − − − − − − − − − − − − − − − − − − + + + Ε = + + + Ε = + + Ε = + + Ε = + Ε = + Ε Ε = + Ε = t t t t t t t t t t t t t t t t t t t t v v v v v v v v v v v v v ε α α α α α α ε α α α α α α ε α α α α ε α α α α ε α α ε α α ε α α( )
(
)
1 0 3 1 2 1 1 0 3 1 0 2 1 0 1 0 0 1 1 α α α α α α α α α α α α α ε − = + + + + = + + + + = K K t VarJadi variansi tidak bersyarat dari εt bersifat homoskedastik. c. Galat
( )
εt mempunyai variansi bersyarat yang tidak konstan. Sifat tersebut dapat dibuktikan dengan(
)
(
)
(
(
)
)
(
)
0 2 1 2 1 1 2 1 − Ε = Ε − Ε = − − − − t t t t t t t t Var ε ε ε ε ε ε ε ε(
)
+ Ε = 2− 2 1 1 0 vt α α εt(
)
(
)
( ) (
)
( )
( )
t t t t t t t t t t h v v v v v = + = Ε + Ε = Ε + Ε = + Ε = − − − − 2 1 1 0 2 2 1 1 2 0 2 1 1 2 0 2 2 1 1 0 2 ε α α ε α α ε α α ε α αJadi variansi bersyarat dari εt bersifat heteroskedastisitas. d. Galat
{ }
εt tidak berkorelasiSifat tersebut dapat dibuktikan dengan
(
)
[
(
( )
)
(
( )
)
]
(
t t k)
k t k t t t k t t kov − − − − Ε = Ε − Ε − Ε = ε ε ε ε ε ε ε ε ,(
)
(
)
( ) ( )
(
(
)(
)
)
0 . , 2 1 1 0 2 1 1 0 2 1 1 0 2 1 1 0 = + + Ε Ε Ε = + + Ε = − − − − − − − − − k t t k t t k t k t t t k t t v v v v kov ε α α ε α α ε α α ε α α ε ε Jadi(
)
(
)
( ) ( )
( ) ( )
0 0 , , = = = − − − − k t t k t t k t t k t t Var Var Var Var kov korr ε ε ε ε ε ε ε εKarena nilai korelasi nol berarti
{ }
εt tidak berkorelasi.Bila pada persamaan (3.6) kuadrat dari εt ditulis dalam proses AR (q) maka persamaannya menjadi (3.8) 2 2 2 2 2 1 1 0 2 t q t q t t t =α +α ε − +α ε − + +α ε − +u ε K
Dengan ut merupakan white noise,α0〉0 dan αi ≥0 untuk i=1,2,K,q Bila 0
3 2
1 =α =α = =αq =
α K maka variabel galat terestimasi menjadi α0. Sebaliknya apabila hal ini tidak terjadi variansi bersyarat Υt akan membesar menurut proses autoregresi pada (3.8).
Persamaan (3.8) merupakan pesamaan Autoregressive Conditional
Heteroscedastic orde q (ARCH (q)). Persamaan (3.8) dapat dinyatakan dalam bentuk
(3.9) t t t =v h ε dengan 2 2 1 1 0 t q t q t
h =α +α ε − +K+α ε − dan vt berdisribusi normal standar Berikut ini beberapa sifat yang dimiliki oleh model ARCH (q):
a. Nilai harapan εt sama dengan nol.
Sifat tersebut dapat dibuktikan dengan menggunakan persamaan (3.9), sehingga akan diperoleh nilai harapan galat sebagai berikut
( )
( )
0 0 2 1 0 2 1 0 2 1 0 t = + Ε = + Ε Ε = + Ε = Ε − = − = − =∑
∑
∑
i t q i i i t q i i t i t q i i t v v ε α α ε α α ε α α εb. Galat
( )
εt mempunyai variansi tidak bersyarat yang konstan. Sifat tersebut dapat dibuktikan dengan( )
(
( )
)
2 t t t Var ε =Εε −Εε( )
+ Ε Ε = + Ε = − = = −∑
∑
2 1 0 2 2 1 2 0 i t q i i t q i i t i t v v ε α α ε α α( )
(
)
(
)
(
)
(
(
)
)
(
2)
1 0 2 2 2 1 0 2 1 1 0 2 2 1 1 0 1 − − − − − − − + + + + + Ε = + + + Ε = q t q q t q t t q t q t t v v Var ε α α α ε α α α α ε α ε α α ε K K(
)
(
)
(
)
(
(
)
(
))
(
)
(
)
(
)
(
)
(
)
(
)
q q q q q q q q t q t q t q q t q t q q t q t t t t t t q t q q t q t q q t q t t t q t q t q q t q t t t v v v v v v v v v v v v v v v v v v v α α α α α α α α α α α α α α α α α α α α α α α ε α α α β α ε α α α α α ε α α α α α ε α α α α α ε α α α ε α α α α − − − = + + + + + + + + + = + + + + + + + + + = + + + + + + + Ε = + + + + + + Ε = + + + + + Ε = − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − K K K K K K K K K K 1 0 3 2 3 1 2 1 1 0 3 0 2 0 0 3 1 0 2 1 0 1 0 0 2 2 2 1 2 2 2 1 2 2 0 2 0 2 3 2 2 2 1 3 1 2 2 2 1 2 1 0 2 1 0 0 2 2 0 2 1 2 2 2 1 0 2 3 1 0 2 2 2 1 1 0 0 2 1 2 2 2 0 2 2 2 1 2 1 2 1 1 0 0 1 1Jadi variansi tak bersyarat dari εt bersifat homoskedastik. c. Galat
( )
εt mempunyai variansi bersyarat yang tidak konstan. Sifat tersebut dapat dibuktikan dengan(
)
(
(
)
)
(
)
( )
Ε + Ε = + Ε = + Ε = − Ε = Ε − Ε = − − = − = − − − − − − − −∑
∑
∑
2 2 0 2 2 1 0 2 2 2 1 0 1 2 2 1 1 1 0 , , , , , , , , i t q i t t i t q i i t i t q i i t q t t t q t t t q t t t q t t t v v v v Var ε α α ε α α ε α α ε ε ε ε ε ε ε ε ε ε ε ε K K K K(
)
( )
2( )
2 1 2 0 1, , t i t q i i t q t t t v v Var = Ε + −Ε = − − ε α∑
α ε ε ε K t i t q i i h = + = − =∑
2 1 0 α ε αJadi variansi bersyarat dari εt bersifat heteroskedastisitas. d. Galat
{ }
εt tidak berkorelasiSifat tersebut dapat dibuktikan dengan
(
)
[
(
( )
)
(
( )
)
]
(
)
( ) ( )
0 . , 2 1 0 2 1 0 2 1 0 2 1 0 = + + Ε Ε Ε = + + Ε = Ε = Ε − Ε − Ε = − − = − = − − − = − − = − − − −∑
∑
∑
∑
i k t q i i i t q i i k t t i k t q i i k t i t q i i t k t t k t k t t t k t t v v v v kov ε α α ε α α ε α α ε α α ε ε ε ε ε ε ε ε Jadi(
)
(
)
( ) ( )
( ) ( )
0 0 , , = = = − − − − k t t k t t k t t k t t Var Var Var Var kov korr ε ε ε ε ε ε ε εB. Pengujian Adanya Efek ARCH Dalam Data Runtun Waktu
Data runtun waktu dalam kenyataannya tidak semua mempunyai efek ARCH. Untuk mengetahui ada atau tidaknya efek ARCH dalam data runtun waktu dapat diuji dengan uji Pengganda Langrange.
Langkah-langkah dalam uji Pengganda langrange sebagai berikut:
1. Tentukan persamaan rata-rata yang paling sesuai untuk data runtun waktu yang ingin dianalisis. Dari persamaan tersebut akan diperoleh kuadrat galat
{ }
2t
ε . 2. Regresikan kuadrat galat
{ }
2t
ε pada konstanta dan qlag terhadap dirinya sendiri.
(3.10) 2 2 2 2 2 1 1 0 2 q t q t t t =α +α ε − +α ε − + +α ε − ε K
3. Hitung koefisien determinasi
( )
R2 dari persamaan (3.10). 4. Dilakukan uji hipotesis seperti dibawah ini:. , , 4 , 3 , 2 , 1 , 0 satu rdapat sedikit te paling ). lag hingga ARCH efek ada tidak ( 0 k 1 2 1 0 0 q k q q K K = ≠ = Η = = = = = = Η α α α α α
Digunakan statistik uji TR2 dengan T menyatakan banyaknya galat pada langkah satu. Dibawah hipotesis nol statistik uji TR2 akan berdistribusi 2
q
χ . Hipotesis nol ditolak bila nilai TR2 lebih besar dari 2
q
χ maka terdapat efek ARCH dalam data runtun waktu tersebut.
Contoh 3.1
Pada data dibawah ini periksalah apakah ada efek ARCH pada data dengan menggunakan uji Langrange Multiplier .
t Υt 1 30 2 20 3 45 4 35 5 30 6 60 7 40 8 50 9 45 10 65 Penyelesaiannya
1. Untuk memperoleh kuadrat galat digunakan persamaan model AR (1)
t t
t =β +β Υ +ε
t Υt Υt−1 ΥtΥt−1 Υt2−1 1 30 - 0 0 2 20 30 600 900 3 45 20 900 400 4 35 45 1575 2025 5 30 35 1050 1225 6 60 30 1800 900 7 40 60 2400 3600 8 50 40 2000 1600 9 45 50 2250 2500 10 65 45 2925 2025
∑
Υt =420∑
Υt−1 =355∑
ΥtΥt−1 =15.500∑
Υ2− =15.175 1 tNilai β dapat diduga dengan