LAPORAN AKHIR
PENELITIAN UNGGULAN ITS
DANA ITS 2020
PENGEMBANGAN PLATFORM BATTERY ELECTRIC VEHICLE
UNTUK MENDUKUNG AUTONOMOUS CAR ITS
Tim Peneliti :
Dr. Bambang Sudarmanta, ST., MT. (PUI SKO ITS)
Prof. Ir. I Nyoman Sutantra, MSc., PhD. (PUI SKO ITS)
Ary Bachtiar Krisna Putra, ST. MT,, PhD. (PUI SKO ITS)
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
LAPORAN AKHIR
PENELITIAN UNGGULAN ITS
DANA ITS 2020
PENGEMBANGAN PLATFORM BATTERY ELECTRIC VEHICLE
UNTUK MENDUKUNG AUTONOMOUS CAR ITS
Tim Peneliti :
Dr. Bambang Sudarmanta, ST., MT. (PUI SKO ITS)
Prof. Ir. I Nyoman Sutantra, MSc., PhD. (PUI SKO ITS)
Ary Bachtiar Krisna Putra, ST. MT,, PhD. (PUI SKO ITS)
Sesuai Surat Perjanjian
Pelaksanaan
Penelitian No: 803/PKS/ITS/2020
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
Daftar Isi
Halaman Judul………...i
Daftar Isi ... ii
Daftar Gambar ... iv
Daftar Tabel ..……….………..……vi
Daftar Lampiran ... vii
BAB I RINGKASAN ... 1
BAB II HASIL PENELITIAN ... 2
2.1 Asumsi Perancangan Mobil Listrik Untuk Empat Penumpang ……….2
2.2. Perancangan Mobil Listrik ………...……2
2.3. Proses Perancangan Rangka Chasis Mobil Listrik……….……….5
2.4. Perancangan Rangka Chasis Kendaraan………..6
2.5. Perancangan rangka chasis pada dudukan baterai………..…..8
2.6. Perancangan rangka chasis belakang pada dudukan sistem penggerak...8
2.7 Analisa yang dilakukan………....9
2.8 Safety Kendaraan………17
2.9 Aturan Kendaraan Listrik (Termasuk Hasil Konversi dari ICE)……….…...26
BAB III STATUS LUARAN………...….29
3.1.. Spesifikasi teknis main component battery electric vehicle………..………...…..29
3.2.. Prototype battery electric vehicle………..…..30
BAB IV PERAN MITRA……….…..34
BAB V KENDALA PELAKSANAAN PENELITIAN……….35
BAB VI KESIMPULAN……….………36
LAMPIRAN 1 Tabel Daftar Luaran ... 41
LAMPIRAN 2 Log Book Kegiatan Pabrikasi Platform BEV ... 43
Daftar Gambar
Gambar 2.1. Prototype battery electric vehicle……….3
Gambar 2.2 Desain front part mobil listrik……….……….4
Gambar. 2.3 Panjang Poros double wishbone suspensi depan……….4
Gambar 2.4. Desain rear part mobil listrik………..………..…5
Gambar 2.5. Penentuan poin pada dudukan rangka chasis mobil listrik………...5
Gambar 2.6 Gambar rolling chassis platform battery electric vehicle………..…6
Gambar 2.7. Tahap Proses Pembuatan Rangka Bagian Depan………7
Gambar 2.8 Rangka Ukuran Bagian Depan……….8
Gambar 2.9. Tahap Proses Pembuatan Rangka Tengah……….……...8
Gambar 2.10. Tahap Proses Pembuatan Rangka Bagian Belakang………..….…….9
Gambar 2.11 Analisa Pada kendaraan posisi menanjak……….10
Gambar 2.12 Hasil simulasi total deformation static structural………..…...13
Gambar 2.13 Komponen yang mengalami total deformation maksimum………..…...13
Gambar 2.14 Hasil simulasi von misses stress static structural………..….…14
Gambar 2.15 Komponen yang mengalami (a) tegangan minimum (b) tegangan maks…….. 14
Gambar 2.16 Safety factor pengujian von misses stress dibanding stress steel AISI 1020….15 Gambar 2.17 Proses pengukuran berat kendaraan………..………...16
Gambar 2.18 Perhitungan dan letak CG pada prototype I-CAR ITS………17
Gambar 2.19 Skema Komponen EV……….…18
Gambar 2.20 IPXXB Test Finger……….19
Gambar 2.21 Skema Pengujian Direct Shock IPXXB……….19
Gambar 2.22 Ilustrasi Uji IPXXB……….……...20
Gambar 2.23 IPXXD Test Wire……….…….…..21
Gambar 2.24 Skema Pengujian IPXXD……….………...21
Gambar 2.25 Skema ilustrasi indirect shock………..…22
Gambar 2.26 Skema Sistem Grounding………..………22
Gambar 2.27 Skema Insulasi Kabel……….….…23
Gambar 2.28 Skema Megger Insulation Tester……….……...23
Gambar 2.29 Simbol peringatan untuk baterai………...…..24
Gambar 2.32 Contoh Perangkat Penghasil Suara Mobil listrik………..….…25 Gambar 3.1 Sistem wiring prototype battery electric vehicle……….….…30 Gambar 3.2 Desain ukuran chassis prototype battery electric vehicle…………...……31 Gambar 3.3 Desain chassis prototype battery electric vehicle……….….…..32 Gambar 3.4 Desain ukuran bagian atas prototype battery electric vehicle……….33
Daftar Tabel
Tabel. 2.1. Dimensi Prototype battery electric vehicle………….……….……….3 Tabel 2.2. Hasil Pengukuran dimensi Kendaraan………..……16 Tabel 2.3. Aturan Pengembangan Kendaraan Listrik………26
Daftar Lampiran
Lampiran 1. Tabel daftar luaran………... 41 Lampiran 2. Progress pabrikasi platform BEV ………..…..43
BAB I
RINGKASAN
Penelitian ini dimaksudkan untuk mendapatkan sebuah rancangan chassis dan system penggerak untuk kendaraan listrik yang aman dan nyaman yang berfungsi sebagai landasan untuk meletakkan bodi kendaraan, motor listrik, sistem kontrol, sistem kemudi, baterai dan komponen lain. Rancangan platform dan prototyping diperlukan untuk mewujudkan prototype battery electric vehicle type commuter car.
Penelitian ini dilakukan menggunakan metode pengembangan (Research Development) dengan bantuan perangkat lunak (software) yang mampu untuk pembuatan suatu model dalam bentuk gambar 3 dimensi, dalam hal ini software yang digunakan adalah Ansys yang dapat menguji konstruksi rangka chassis bertujuan untuk mengetahuai structural displacement, stresses dan kekuatan bahan pada konstruksi frame kendaraan listrik. Untuk sistem penggerak dilakukan dengan memperhitungkan semua beban yang ada serta hambatan yang terjadi. Setelah mendesain dilakukan pembuatan prototype mobil listrik dengan komponen utama berupa motor listrik 5kW (6.7 hp) 48 volt AC, baterai menggunakan Six 8-volt Motive T-875 FLA batteries, dan kontroler dari Toyota industries. Pengujian yang dilakukan meliputi pengujian safety dan performasi kendaraan.
Hasil yang didapatkan berupa prototype battery electric vehicle untuk mendukung Autonomous Car ITS. Spesifikasi teknis berupa kecepatan maksimum 30 km/jam dengan travel distance maksimum sebesar 40 km dan charging time 6 jam. Spesifikasi teknik kendaraan berupa wheel base 2100 mm, dengan jumlah penungpang 4-5 orang.
Kata kunci : Rancangan Chassis, System Penggerak, Kendaraan Listrik, Kendaraan Autonomous,
Ringkasan penelitian berisi latar belakang penelitian,tujuan dan tahapan metode penelitian, luaran yang ditargetkan, kata kunci
BAB II
HASIL PENELITIAN
Hasil penelitian ini berupa platform dan prototype battery electric vehicle untuk menunjang Auonomous Car ITS
2.1 Asumsi Perancangan Mobil Listrik Untuk Empat Penumpang
Asumsi perancangan mobil listrik untuk empat penumpang diambil dari dimensi mobil golf cabrio yang memiliki ukuran sebagai berikut :
Gambar 2.1. Prototype battery electric vehicle Tabel. 2.1. Dimensi Prototype battery electric vehicle
Panjang Mobil 3100 mm
Lebar 1400 mm
Tinggi 1567 mm
Panjang Sumbu Roda Depan Dan Belakang 2100 mm
2.2. Perancangan Mobil Listrik
Pada perancangan mobil listrik dibagi 3 konsep perancangan yaitu perancangan rear part pada sistem suspensi belakang dan sistem penggerak, perancangan front part yaitu merancang bagian sistem suspensi depan dan sistem kemudi, dan perancangan rangka chassis yaitu merancang rangka sebagai tulang punggung yang baru harus mempunyai kontruksi kuat untuk menahan atau memikul beban kendaraan. Semua beban dalam kendaraan baik itu penumpang, mesin, sitem kemudi, dan segala peralatan kenyamanan semuanya diletakkan di atas rangka. Oleh karena itu setiap kontruksi rangka harus mampu untuk menahan semua beban dari kendaraanya.
2.2.1. Perancangan front Part
Dari hasil penelitian saudara sudita mahasiswa jurusan teknik mesin fakultas teknik universitas negeri semarang tentang perancangan fron part yaitu merancang sistem suspensi depan dan sistem kemudi diketahui pada rancangan tersebut aman karena bisa dilihat pada nilai safety factor. dibawah ini adalah gambar front part dan tabel data hasil pengujian analisis kekuatan konstruksi menggunakan software Siemens NX8 pada desain rancangan sistem suspensi depan mobil listrik.
Gambar 2.2 Desain front part mobil listrik
Gambar. 2.3 Panjang Poros double wishbone suspensi depan
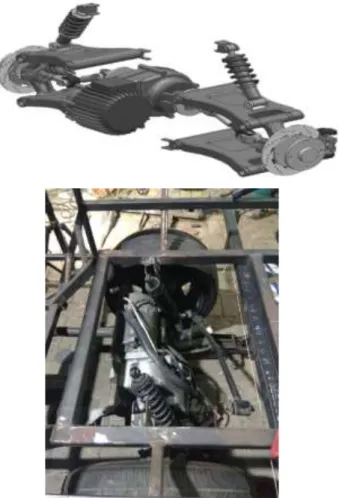
2.2.2. Perancangan Rear Part
Dari hasil perancangan rear part yaitu merancang pada sistem suspensi belakang dan sistem penggerak diketahui pada rancangan tersebut aman karena bisa dilihat pada nilai safety factor. Dibawah ini adalah gambar rear part hasil pengujian analisis kekuatan konstruksi menggunakan software Ansys pada desain rancangan sistem suspensi belakang dan system penggerak mobil listrik.
Gambar 2.4. Desain rear part mobil listrik
.
Gambar 2.6 Gambar rolling chassis platform battery electric vehicle
Pada perancangan rangka chasis mobil listrik selain menentukan dimensi dari peletakan poin-poin suspensi belakang dan depan, pada pernacangan rangka mobil listrik ini juga menentukan penumpang, dimana pada rangka mobil listrik ini ada 4 jumlah penumpang, pada penumpang harus memberikan kenyamanan pada saat mengemudi maupun pada penumpang itu sendiri.
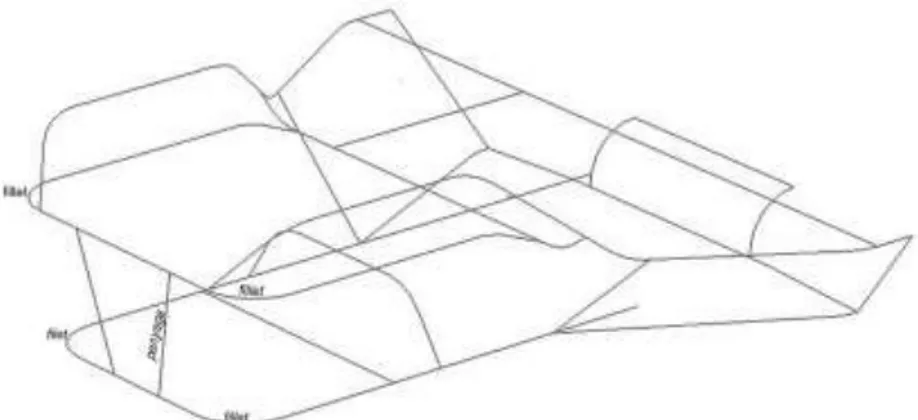
2.4. Perancangan Rangka Chasis Kendaraan
Pada rangka kendaraan memiliki lebar 1400 mm dan panjang 3100 mm dimana pada rangka chasis bagian depan terdapat dudukan sistem kemudi, dudukan shockbreaker dan dudukan double wishbone. Pada bagian-bagian tersebut adalah poin bagian yang diambil pada proses pembuatan rangka bagian depan.
Keterangan :
Pada nomor 1 dan 2 adalah bagian dudukan suspensi depan kanan dan kiri.
Pada nomor 3 adalah bagian kemudi
Pada nomor 4, 5, 6, 7 adalah tempat dudukan penumpang
Pada nomor 8 dan 9 adalah bagian dudukan suspensi belakang kanan dan kiri
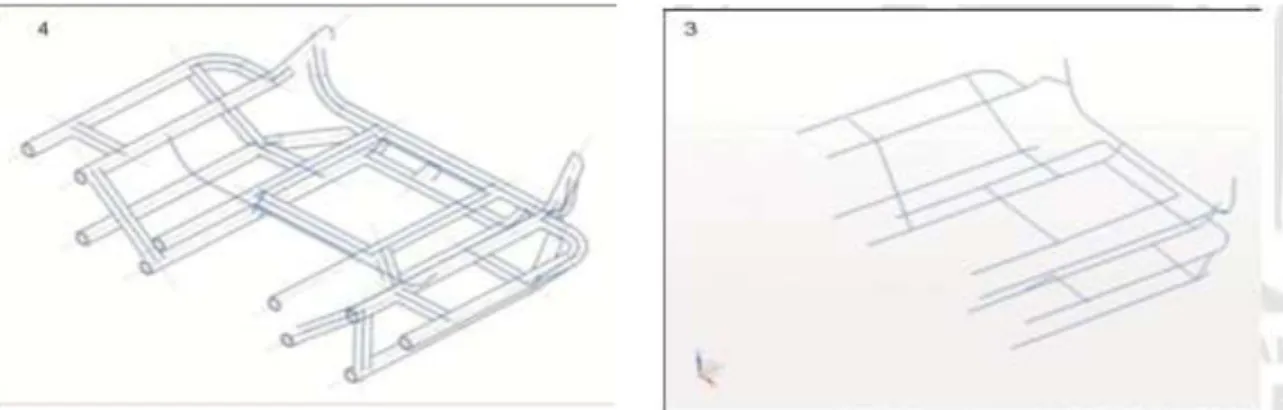
Gambar 2.7. Tahap Proses Pembuatan Rangka Bagian Depan
Pada tahap proses gambar 1 ditujukan awal mulai dari pembuatan garis dan dilanjukan dengan gambar tahap 2 dimana pada gambar tersebut diberikan penyagga yang berfungsi sebagai penguat dari rangka bagian bawah dan atas sedangkan pada tahap gambar 3 sudah menujukan bentuk rangka bagian depan dan pada rangka bagian depan ada sebuah lengkungan dimana pada pemberian lengkungan tersebut sebagai kekuatan pada rangka bagian depan, kemudian selanjutnya pemberian jenis matrial untuk rangka itu sendiri adalah menggunka pipa tube 310_SS.
Gambar 2.8 Rangka Ukuran Bagian Depan
2.5. Perancangan rangka chasis pada dudukan baterai.
Pada tahap rangka chasis bagian tengan yang berfungsi sebagai dudukan batrai, pada batrai itu sendiri memilki lebar 326 mm dan tinggi 327 mm sedangkan untuk pembuatan rangka utama pada bagian tengan harus menyesuaikan berapa lebar yang dimiliki oleh batrai supaya pada saat mobil berjalan tidak terjadi goncangan atau posisi batrai tidak berubah. Dibawah ini adalah proses perangan rangka chasis untuk bagian tengah
Gambar 2.9. Tahap Proses Pembuatan Rangka Tengah
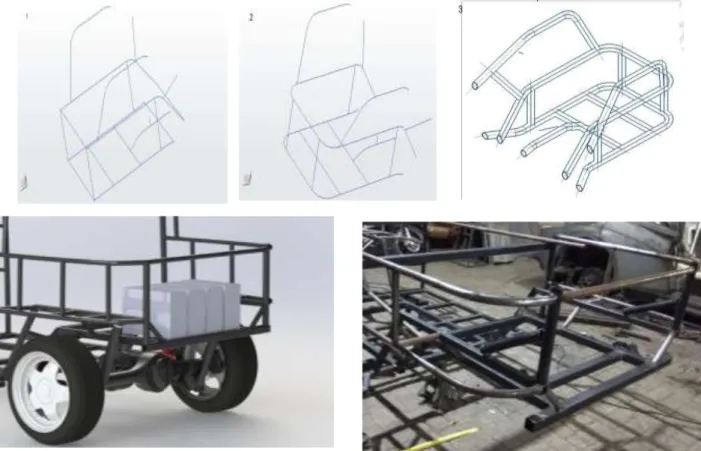
2.6. Perancangan rangka chasis belakang pada dudukan sistem penggerak.
Pada rangka chasis bagian belakang terdapat dudukan system penggerak mobil listrik , dudukan shockbreaker dan dudukan double wishbone. Pada bagian-bagian tersebut adalah poin
bagian yang diambil pada proses pembuatan rangka bagian belakang pada bagian itu juga rangka ditentukan berapa lebar yang harus menjadi dudukan shocjbreker dan double wishbone.dibawah ini akan menjelaskan bagaimana proses pembuatan rangka bagian belakang yang diambil dari garis poin rangka bagian tengah.
Gambar 2.10. Tahap Proses Pembuatan Rangka Bagian Belakang
Pada tahap proses gambar 1 ditujukan awal mulai dari pembuatan garis dan dilanjukan dengan gambar tahap 2 dimana pada gambar tersebut diberikan penyaga yang berfungsi sebagai penguat dari rangka bagian bawah dan atas sedangkan pada tahap gambar 3 sudah menujukan bentuk rangka bagian depan dan pada rangka bagian depan ada sebuah lengkungan dimana pada pemberian lengkungan tersebut sebagai kekuatan pada rangka bagian depan.
2.7 Analisa yang dilakukan 2.7.1. Analisa performansi
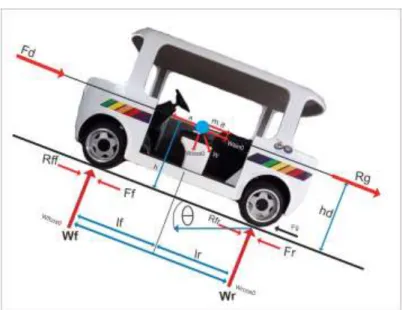
Torsi motor dan tenaga yang dibutuhkan dikirim dari motor hingga ke roda pada kendaraan listrik dan ditentukan oleh kekuatan yang bekerja pada kendaraan saat sedang dikendarai sepanjang jalan. Kekuatan-kekuatan motor awalnya akan disimulasikan di bangku tes sasis dynamometer guna melihat karakteristik dari torsi dan power dari kendaraan listrik. Kehilangan energi dalam instalasi pengujian dan juga pada kendaraan listrik dipertimbangkan dalam perhitungan. Ketika kendaraan didorong di sepanjang jalan, keseimbangan dinamis ada di antara traksi pada roda dan dan permukaan jalan. Dalam kasus percepatan atau perlambatan akan terdapat tambahan gaya misalnya pada jalan menanjak atau menurun. Analisa kebutuhan power diambil pada kondisi beban kerja
maksimum yaitu pada keadaal jalan menanjak dengan massa kendaraan maksimum yang masih diijinkan untuk suatu operasi jalan kendaraan.
Gambar 2.11 Analisa Pada kendaraan posisi menanjak • ∑ 𝐹 = 0 , pada gaya searah jalan tanjakan, dengan asumsi Vk=konstan • Ft − Rr − Rg − 𝐹𝑑 = 0
• Ft = Rr + 𝑅𝑔 + 𝐹𝑑
Dimana: Fd = Gaya Drag Rr = Hambatan roling
Rg = Hambatan tanjakan
Jika terdapat percepatan sebesar a, maka ada tambahan gaya hambat percepatan, sehingga persamaan untuk kebutuhan tenaga pada motor listrik menjadi :
𝐹𝑡 = 𝑓. (𝑊. 𝐶𝑜𝑠𝜃) + 𝑊. 𝑆𝑖𝑛𝜃 + 𝐹𝑑 + 𝐹𝑎
𝐹𝑡 = 𝑓. (𝑀. 𝑔. 𝐶𝑜𝑠𝜃) + 𝑀. 𝑔. 𝑆𝑖𝑛𝜃 +1/2 . 𝜌 . 𝐶𝑑 . 𝐴 . 𝑣2 + (𝑀 + 𝑚𝑓). 𝑑𝑣/𝑑𝑡
Dimana: 𝑑𝑣/𝑑𝑡 = percepatan kendaraan ( 𝑚/𝑠2 )
M = Massa Kendaraan (kg)
mf = Massa fiktif rolling (kg)
g = Percepatan Gravitasi (9,8 𝑚/𝑠2)
𝜃 = Sudut Kemiringan Jalan
𝜌 = Densitas Udara (𝑘𝑔/𝑚3)
Cd = Koefisien drag solid bodi pada kendaraan
A = Luas Penampang yang melingkupi solid bodi mobil (𝑚2)
V = Kecepatan kendaraan (m/s)
Dari persamaan diatas dapat dilihat bahwa semua variabel yang ada pada perhitungan dapat dikontrol kecuali kondisi jalan serta desitas udara, namun variabel tersebut dapat didekati dengan
keadaan rata-rata jalan pada perkotaan ataupun pedesaan sesuai yang diinginkan serta densitas udara yang diasumsikan bekerja pada tekanan 1 atm. Variabel-variabel dalam perhitungan tersebut yang nantinya akan dijadikan acuan dalam mendesain sebuah kendaraan.
Dari perhitungan diatas juga dapat diambil contoh sederhana dengan mengabaikan pengaruh massa fiktif rooling (mf), dan gaya hambat rooling untuk melihat kebutuhan tenaga penggerak motor listrik dengan melihat interval kenaikan kecepatan terhadap lama waktu dalam range jarak tertentu seperti:
Mobil didesain memiliki performa kecepatan 0-60 km/jam ditempuh dalam waktu 16s, dengan top speed 80 km/jam, maka tenaga yang dibutuhkan dapat dihitung.
Impuls = perubahan momentum dari kendaraan 𝐼 = 𝑑𝑃
𝑀 𝑥 𝑎 𝑥 𝑡 = 𝑀 𝑥 (𝑉2 − 𝑉1)
𝑎 =(𝑉2 − 𝑉1)/𝑡 = (30/3,6) x (𝑚/s/16𝑠) = 6 𝑚/𝑠2
Dengan data percepatan tersebut dapat dihitung kebutuhan tenaga penggerak untuk kondisi jalan datar, 𝜃 = Sudut Kemiringan Jalan = 0
𝐹𝑡 = 𝑓. (𝑀. 𝑔. 𝐶𝑜𝑠𝜃) + 𝑀. 𝑔. 𝑆𝑖𝑛𝜃 + 1/2 . 𝜌 . 𝐶𝑑 . 𝐴 . 𝑣2 + (𝑀 + 𝑚𝑓). 𝑑𝑣/𝑑𝑡
𝐹𝑡 = 0,1 𝑥 720 𝑘𝑔 𝑥 9,8𝑚/𝑠2 + 0 + 1/2 . 1,23𝑘𝑔/m3. 0,31 . 2,37 𝑚2 . (60 + 0/ 2 𝑥 3,6 𝑚/𝑠)2
+ 720 𝑘𝑔. 1 𝑚/𝑠
𝐹𝑡 = 705,6 + 45,2 + 720 = 1470 𝑁
Setelah didapatkan tenaga yang dibutuhkan dari hasil perhitungan selanjutnya dapat ditentukan kebutuhan energi yang dibutuhkan untuk mensuplai kendaraan sesuai yang diinginkan. Dengan menentukan berapa kecepatan dari kendaraan yang diinginkan dikalikan dengan tenaga yang dibutuhkan maka akan didapat energi yang dibutuhkan untuk penggerak kendaraan.
Energi yang dibutuhkan :
𝐸 = 𝐹𝑡 𝑥 𝑉
𝐸 = 1470 𝑁 𝑥 ((30 + 0)/ (2 𝑥 3,6)) 𝑚/𝑠 = 6,12 𝑘𝑊
Dimana: E = Energi yang dibutuhkan (kW)
Ft = Tenaga yang dibutuhkan (N)
Dari kebutuhan energi penggerak diatas dapat diketahui kebutuhan konsumsi dari suplai baterai berdasarkan pemakaian per jam yang nantinya akan menentukan jarak yang mampu ditempuh oleh kendaraan.
Pada pemakaiannya terdapat kehilangan energi pada setiap sistem yang digunakan untuk mengkonversi energi. Untuk itu perlu ditambahkan seberapa efisien sebuah sistem dapat bekerja agar dalam mendesain kendaraan dapat menghasilkan sebuah produk sesuai yang diinginkan.
Asumsi kecepatan rata-rata kendaraan = 30 km/h = 8,3 m/s
𝐹𝑡 = 𝑓. (𝑀. 𝑔. 𝐶𝑜𝑠𝜃) +1/2 . 𝜌 . 𝐶𝑑 . 𝐴 . 𝑣2
𝐹𝑡 = 0,03 𝑥 720 𝑘𝑔 𝑥 9,8𝑚/𝑠2+ 1/2 . 1,23𝑘𝑔/𝑚3. 0,31 . 2,37 𝑚2. (8,3𝑚/𝑠)2
= 215,430 + 180 = 395,430 𝑁 𝐸 = 395,430 𝑁 𝑥 8,3 𝑚/𝑠 = 3,282 𝑘𝑊
𝐸𝑏 = E / (𝑒𝑓𝑏 𝑥 𝑒𝑓𝑝𝑐 𝑥 𝑒𝑓𝑚 𝑥 𝑒𝑓𝑡)
Dimana : Eb = Energi yang dibutuhkan baterai(kWh)
Efb = Efisiensi baterai
efpc = efisiensi power control efm = efisiensi motor
eft = efisiensi transmisi
E = Energi yang dibutuhkan (kW)
𝐸𝑏 = 𝐸
𝑒𝑓𝑏 𝑥 𝑒𝑓𝑝𝑐 𝑒𝑓𝑚 𝑥 𝑒𝑓𝑡 =
4,4
0,96 𝑥 0,95 𝑥 0,92 𝑥 0,95= 5,45 𝑘𝑊
Dari perhitungan diatas, dengan kapasitas baterai Pb = 5 kWh, maka jarak yang mampu ditempuh dalam sekali charging adalah:
𝑆 =𝑃𝑏 𝐸𝑏𝑥𝑉 = 5 𝑘𝑊ℎ 5,45 𝑘𝑊 𝑥 40 𝑘𝑚 ℎ = 40 𝑘𝑚
2.7.2. Analisa Kekuatan Struktur
Hasil simulasi Static Structural pembebanan vertikal dibagi menjadi dua, yaitu: total
deformation, dan Von misses Stress.
1. Total Deformation
Hasil simulasi ini adalah besar dari nilai deformasi yang terjadi pada chassis mobil platform BEV. Besar nilai scalar deformasi yang terjadi diilustrasikan dengan menggunakan warna. Berikut hasil simulasi static structural pembebanan vertikal pada mobil platform BEV.
Gambar 2.12 Hasil simulasi total deformation static structural
ang mengalami deformasi maksimum
Gambar 2.13 Komponen yang mengalami total deformation maksimum
Dapat Dilihat pada gambar 2.13 hasil simulasi total deformation dari mobil platfrom BEV. gambar tersebut merupakan ilustrasi besar dari nilai total deformation yang terjadi. Terlihat bahwa mayoritas besar deformasi yang terjadi di sasis berwarna hijau kebiruan yang memiliki nilai 0,055254 mm - 0,22101 mm. Selain itu, terdapat sebagian elemen berwarna biru tua yang memiliki nilai dibawah 0,055254 mm, elemen berwarna berwarna kuning-merah yang memiliki nilai 0,22101 mm - 0,49728 mm. Pada simulasi ini dapat terlihat pada gambar 4 komponen dari bagian sasis depan yang mengalami total deformation maksimum yang ditunjukan dengan elemen berwarna merah.
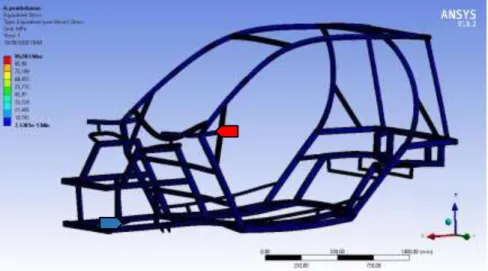
2. Von Misses Stress (Tegangan)
Hasil simulasi ini adalah besar dari nilai tegangan yang terjadi pada chassis mobil platform BEV. Besar nilai scalar tegangan yang terjadi diilustrasikan dengan menggunakan warna. Berikut hasil simulasi static structural pembebanan vertikal
pada mobil platform BEV.
Min
Gambar 2.14 Hasil simulasi von misses stress static structural
Gambar 2.16 Safety factor hasil pengujian von misses stress disbanding stress material steel AISI 1020
Dapat Dilihat pada gambar 5 hasil simulasi von misses stress static structural pembebanan vertical dari mobil platfrom BEV. gambar tersebut merupakan ilustrasi besar dari nilai von misses
stress yang terjadi. Terlihat bahwa mayoritas besar tegangan yang terjadi di sasis berwarna biru
yang memiliki nilai 10,743 MPa – 32,228 MPa. Pada simulasi ini dapat terlihat pada gambar 6 (a) bahwa komponen mengalami tegangan minimum dengan nilai tegangan 7,1385e-5 MPa, sementara gambar 6 (b) menunjukan bahwa komponen mengalami tegangan maksimum yang ditunjukan warna merah dengan nilai tegangan 96,683 MPa. Dari hasil tegangan maksimum dibandingkan dengan nilai tegangan (yield strength) dari material AISI 1020 dengan yield strength =350 MPa untuk mengetahui nilai Safety Factor (factor keamanan) dari hasil simulasi ini. Dari gambar 69 terlihat setelah dibandingkan didapatkan bahwa nilai Safety Factor yang didapatkan adalah 3,6201 yang artinya sasis ini aman untuk digunakan. Batas aman minimum dari pengujian sasis dilihat jika safety factor diatas 1 (SF>1).
2.7.3 Analisa Titik Pusat Grafitasi (CG)
Titik pusat grafitasi dihitung dengan menimbang beban kendaraan untuk mencari sebaran beban yang ada pada tiap roda. Berikut ini hasil perhitungan beban dan pusat grafitasi dari Platform I-CAR ITS:
LF: 134 kg RF: 131 kg LR: 244, 5 kg RR: 242 kg Berat Total: 751,5 kg LF: 134,5 kg RF: 131,5 kg LR: 245 kg RR: 242 kg Berat Total: 753 kg
Gambar 2.17 Proses pengukuran berat kendaraan Tabel 2.2. Hasil Pengukuran dimensi Kendaraan
Gambar 2.18 Perhitungan dan letak CG pada prototype I-CAR ITS
2.8 Safety Kendaraan
Dalam perancangan protoype battery electric vehicle perlu ditinjau segi keamanan atau
safety dan juga regulasi. Adapun safety kendaraan yang dimaksud dapat diuraikan sebagai berikut.
2.8.1 Perlindungan dari Kontak Listrik
Perlindungan dari kontak listrik dibedakan menjadi dua bagian, yaitu perlindungan dari
kontak listrik secara langsung dan tidak langsung. BEV hasil konversi wajib dilengkapi perlindungan menyeluruh dari kontak/sengatan listrik antara komponen/bagian listrik mobil dengan manusia. Terdapat 2 jenis kontak listrik (electric shock) yang dapat terjadi antara komponen listrik dengan manusia yaitu sengatan langsung dan tidak langsung. Untuk memahami keduanya, dapat dilihat skema komponen listrik di gambar 2.19.
Gambar 2.19 Skema Komponen EV
Gambar 2.19 merupakan skema komponen listrik dalam mobil EV yang dapat ditemui. Komponen listrik dalam mobil EV terdiri dari 2 bagian utama yaitu bagian aktif (active component) dan penutup (case). Active component merupakan bagian yang bekerja aktif dialiri listrik. Sedangkan case atau penutup merupakan bagian yang dimaksudkan melindungi active component dari kontak fisik dengan lingkungan. Case merupakan bagian yang tidak dimaksudkan untuk dialiri listrik. Namun, jika suatu kesalahan terjadi, case dapat sewaktu waktu dialiri listrik akibat adanya kontak dengan active component. Sengatan/kontak listrik yang terjadi akibat kontak fisik dengan
case disebut kontak listrik tidak langsung (indirect shock). Sedangkan sengatan/kontak listrik yang
diakibatkan dari kontak fisik antara manusia dengan active component disebut kontak listrik langsung (direct shock).
A. Direct Shock
Active component merupakan bagian yang ditutup oleh case. Case digunakan untuk
mencegah adanya kontak fisik yang tidak diinginkan antara active component dengan lingkungan termasuk manusia. Case dapat memiliki beberapa lubang yang memang dibuat untuk tujuan tertentu. Kontak fisik antara manusia dengan active component dapat terjadi melalui lubang-lubang tersebut. Maka dari itu, untuk mengetahui keamanan suatu komponen listrik dari terjadinya kontak listrik secara langsung (direct shock), dilakukan pengamatan dan pengujian di bagian lubang yang ada pada case dari komponen listrik tersebut. Selain direct shock dan indirect shock, sengatan listrik juga dapat terjadi akibat insulasi kabel yang tidak baik. Terdapat 2 cara direct shock dapat terjadi yaitu melalui kontak dengan perkakas dan kontak dengan tubuh manusia tanpa perkakas (jari manusia). Terdapat 2 metode pengujian keamanan direct shock yaitu uji IPXXB untuk menguji keamanan dari direct shock akibat kontak fisik dengan jari manusia dan uji IPXXD untuk menguji keamanan dari direct shock akibat kontak listrik dengan perkakas.
Uji IPXXB dilakukan menggunakan alat uji IPXXB test probe dimana alat uji tersebut merupakan tiruan dari jari manusia dan berfungsi sebagai alat simulasi keamanan. IPXXB test
probe atau disebut juga IPXXB test finger digambarkan dalam gambar 4.15 di bawah ini.
Gambar 2.20 IPXXB Test Finger
Gambar 2.20 merupakan ilustrasi dari IPXXB test finger. Dapat dilihat dari gambar 4.15, alat uji tersebut menyerupai bentuk jari manusia dimana juga terdapat 2 persendian. Terdapat 2 bagian utama dari IPXXB test finger yaitu bagian isolator untuk dipegang dan bagian batang konduktor yang berbentuk menyerupai jari manusia untuk digunakan sebagai simulasi kontak listrik. Dimensi dari batang konduktor alat tersebut sama dengan ukuran dimensi jari manusia secara umum. Batang konduktor tersebut memiliki panjang total sebesar 80 mm dan diameter 12 mm. Cara menggunakan IPXXB test finger dapat dilihat dalam gambar 4.16 di bawah ini.
Gambar 2.21 menjelaskan bagaimana pengujian IPXXB dilakukan. Jari uji (test finger) dimasukkan ke dalam lubang/bukaan yang ada pada case dari komponen listrik sedalam mungkin kemudian digerakkan ke segalah arah. Terdapat bagian di dalam case yaitu bagian aktif yang menjadi sumber berbahaya listrik. Jari uji dihubungkan dengan amperemeter atau voltmeter. Ilustrasi uji IPXXB pada gambar 2.22
Gambar 2.22 Ilustrasi Uji IPXXB
Lubang dikatakan aman dari direct shock dengan jari manusia jika amperemeter atau voltmeter menunjukkan tidak adanya kontak listrik dengan jari uji. Terdapat 2 kondisi dari lubang yang diuji dapat dikatakan aman dari direct shock dari kontak dengan jari manusia dimana amperemeter atau voltmeter menunjukkan tidak adanya kontak listrik yaitu :
1. Jari uji tidak mampu melewati lubang
2. Jari uji mampu melewati lubang dan digerakkan ke segala arah namun tidak timbul kontak listrik
Uji IPXXD dilakukan menggunakan alat uji IPXXD test probe dimana alat uji tersebut merupakan tiruan dari perkakas perawatan atau perkakas perbaikan dan berfungsi sebagai alat simulasi keamanan. IPXXD test probe atau disebut juga IPXXD test wire digambarkan dalam gambar 4.18 di bawah ini.
Gambar 2.23 IPXXD Test Wire
Gambar 2.23 merupakan ilustrasi dari IPXXB test wire. Alat uji tersebut berbentuk kabel kaku mensimulasikan perkakas perawatan (maintenance tool). Terdapat 2 bagian utama dari IPXXD test wire yaitu bagian isolator untuk dipegang dan bagian batang konduktor yang berbentuk tongkat untuk digunakan sebagai simulasi kontak listrik. Batang konduktor memiliki panjang 100 mm dan diameter 2.5 mm. Cara uji IPXXD test wire dapat dilihat dalam gambar 2.24 di bawah ini.
Gambar 2.24 Skema Pengujian IPXXD
Gambar 2.24 menjelaskan bagaimana pengujian IPXXD dilakukan. Kabel uji (test wire) dimasukkan ke dalam lubang/bukaan yang ada pada case dari komponen listrik sedalam mungkin kemudian digerakkan ke segalah arah. Terdapat bagian di dalam case yaitu bagian aktif yang menjadi sumber berbahaya listrik. Jari uji dihubungkan dengan amperemeter atau voltmeter. Lubang dikatakan aman dari direct shock melalui perkakas jika amperemeter atau voltmeter menunjukkan tidak adanya kontak listrik dengan test wire. Terdapat 2 kondisi dari lubang yang diuji dapat dikatakan aman dari direct shock melalui perkakas dimana amperemeter atau voltmeter menunjukkan tidak adanya kontak listrik yaitu :
1. Test wire tidak mampu melewati lubang.
2. Test wire mampu melewati lubang dan digerakkan ke segala arah namun tidak timbul kontak listrik
B. Indirect Shock
Case dari suatu komponen listrik tidak ditujukan untuk bekerja sebagai penghantar listrik
aktif. Dalam beberapa kondisi yang tidak diinginkan, beberapa bagian dari active component dapat menyentuh case dan membuat case teraliri arus listrik. Hal ini dapat menyebabkan sengatan/kontak listrik dengan manusia saat menyentuh case.
Gambar 2.25 Skema ilustrasi indirect shock
Dalam kondisi seperti dalam gambar 2.25 kontak listrik dapat terjadi terhadap manusia. Arus listrik yang melalui case dapat dibuang atau dialihkan ke suatu sistem grounding. Sistem
grounding menampung beban listrik berlebih yang mengaliri case. Sedemikian rupa suatu
komponen listrik haruslah dilengkapi dengan rangkaian yang memberikan sistem grounding yang baik untuk mencegah timbulnya indirect shock yang berbahaya. Skema ilustrasi sistem grounding pada suatu komponen listrik dapat dilihat dalam gambar 2.26 di bawah ini.
C. Insulasi Kabel
Insulasi kabel merupakan pelapisan kabel konduktor dengan bahan isolator. Digambarkan dalam gambar 2.27 di bawah ini.
Gambar 2.27 Skema Insulasi Kabel
Nilai resistansi insulasi dari isolator pembungkus kabel harus cukup tinggi untuk bisa mencegah arus listrik bisa mengalirinya dan menimbulkan sengatan listrik.Nilai resistansi insulasi
haruslah lebih dari atau sama dengan 500 𝑜ℎ𝑚/𝑣𝑜𝑙𝑡, dituliskan :
𝐼𝑛𝑠𝑢𝑙𝑎𝑡𝑖𝑜𝑛 𝑅𝑒𝑠𝑖𝑠𝑡𝑎𝑛𝑐𝑒 ∶ 𝑅𝑖 ≥ 500 𝑜ℎ𝑚/𝑣𝑜𝑙𝑡
Beberapa metode dapat digunakan untuk mengetahui nilai resistansi suatu insulasi kabel. Salah satunya yaitu Megger insulation tester seperti digambarkan dalam Gambar 2.28 di bawah ini.
2.8.2 Evaluasi Baterai
Jika baterai yang digunakan adalah baterai DC, maka tegangan listrik baterai haruslah berada pada rentang 60 volt hingga 1500 volt. Jika baterai yang digunakan adalah baterai AC, maka tegangan listrik baterai haruslah berada pada rentang 30 volt hingga 1000 volt. Dituliskan :
DC battery :Voltage 60V – 1500V AC battery : Voltage 30V – 1000 V
Baterai dan komponen berarus listrik pada mobil harus diberikan simbol. Salah satu contoh bentuk simbol adalah yang seperti pada Gambar 2.29. Kabel yang tidak mempunyai cover/case harus diberi warna kuning seperti pada gambar 2.30. Contoh penerapan regulasi simbol dan warna kabel dapat dilihat pada gambar 2.31
Gambar 2.29 Simbol peringatan untuk baterai
Gambar 2.30 Kabel berwarna kuning untuk baterai
2.8.3 Keaamanan Pengoperasian
Keamanan pengoperasian meliputi sistem peringatan dan pemberi informasi pada mobil. Kendaraan listrik wajib dilengkapi dengan 3 pengamanan pengoperasian utama di antaranya :
1. Sistem peringatan/informasi apakah mobil siap dikendara/aktif atau tidak. 2. Sistem peringatan/informasi jika mobil ditinggalkan dalam kondisi menyala.
3. Pengamanan charging : Mobil tidak bisa dikendarai jika masih dalam proses charging.
2.8.4 Emisi Hydrogen
Beberapa baterai menghasilkan emisi hidrogen yang menjadi polutan udara. Regulasi berkaitan dengan emisi hidrogen adalah untuk baterai jenis Lid-acid dimana ambang batas emisi hidrogen adalah senilai 125 gram per 5 jam.
2.8.5 Suara Mobil
Kendaraan listrik menggunakan motor listrik sebagai penggerak dimana suara bising tidak dihasilkan. Suara motor sangat kecil untuk bisa didengar cukup jelas. Hal ini dapat merugikan karena dengan tidak adanya suara, kewaspadaan akan adanya mobil listrik yang bergerak bagi pejalan kaki atau pengguna jalan lainnya menjadi sangat kecil. Untuk itu, kendaraan listrik wajib dilengkapi sistem perangkat penghasil suara Accoustic Vehicle Alerting System (AVAS) untuk memberi kewaspadaan dengan tanpa menimbulkan gangguan. Contoh perangkat AVAS dapat dilihat pada gambar 2.32 di bawah ini.
Gambar 2.32 Contoh Perangkat Penghasil Suara Mobil listrik
Sesuai peraturan yang berlaku, sistem suara pada mopil listrik wajib mengikuti ketentuan-ketentuan sebagai berikut :
1. Kenyaringan maksimal (Maximum loudness) : 75 decibel
2. Pada kecepatan V≥10 km/h, kenyaringan minimal (minimum loudness):50 dB
4. Saat bergerak mundur (reverse movement), minimum loudness : 47 dB
5. Frequency Shift : Adanya suara yang menandakan pergantian gigi yang berbeda-beda. Terdapat perbedaan suara juga antara pergantian gigi untuk akselerasi dan de-akselerasi. 6. Stationary sound : Diperbolehkan memberikan suara saat mobil berhenti (tidak wajib) 7. Driver selectable sound : Diperbolehkan memberikan alternatif pilihan jenis-jenis suara
yang dapat dipilih pengendara (tidak wajib).
8. Dilarang menyediakan Pause function : mode mematikan segala suara EV.
2.9 Aturan Kendaraan Listrik (Termasuk Hasil Konversi dari ICE)
Dalam pengembangan kendaraan listrik termasuk konversi dari ICE diperlukan aturan yang jelas dalam pelaksanaannya. Hal ini dimaksudkan agar hasil dari pengembangan dapat dipastikan keamanannya untuk dikendarai. Adapun aturan pengembangan kendaraan listrik diatur pada undang-undang no 44 tahun 2020. Adapun aturan pengembangan kendaraan listrik termasuk konversi yang perlu diperhatikan seperti ditunjukkan pada Tabel berikut ini.
Tabel 2.3. Aturan Pengembangan Kendaraan Listrik
Akumulator
No. Pasal Isi Pasal
1
9.1 Akumulator sebagaimana yang dimaksud dalam pasl 3 huruf a harus memenuhi
persyaratan sebagai berikut:
(a) Ditempatkan dengan mempertimbangkan jarak terdekat dengan tanah, dipasang kokoh terikat pada kendaraan, dan persebaran berat sesuai dengan kondisi kendaraan sebelum konversi.
2 (b) Akumulator terletak di belakang, di dalam atau di bawah kompartemen
penumpang, sistem penahan akumulator harus dapat menahan:
1. Beban dalam arah memanjang ke depan, 20 kali berat gabungan akumulator dan sistem penahan;
2. Ke semua arah lain, 2.5 kali berat gabungan baterai dan sistem penahan
3 (c) Akumulator tidak boleh diposisikan sedemikian rupa sehingga ada
resiko kerusakan yang tinggi saat terjadi kecelakaan.
4 (d) Akumulator yang berada dalam lebih dari satu wadah yang diletakan
berdekatan dengan jarak kurang dari 300 mm.
Battery Management System
5 9.2 BMS sebagaimana dimaksud dalam pasal 3 huruf c harus memenuhi
persyaratan sebagai berikut
(a) Dapat ditempatkan terpisah ataupun menyatu dengan susunan akumulator.
(b) Ditempatkan dengan perlindungan terhadap kelembaban, debu, dan percikan atau genangan air.
Motor Listrik
9.3 Motor listrik sebagaimana dimaksud dalam pasal 3 huruf c harus memenuhi
persyaratan pemasangan sebagi berikut:
6 (a) Ditempatkan kokoh pada kendaraan dengan mempertimbangkan
getaran yang timbul ketika kendaraan beroperasi;
7 (b) Dapat ditempatkan langsung dengan gardan atau menyatu dengan
transmisi;
8 (c) Daya motor listrik yang digunakan mempertimbangkan rasio daya
motor penggerak dengan beban kendaraan, sesuai dengan perundangan yang berlaku;
9 (d) Daya motor listrik maksimum sesuai dengan spesifikasi awal kendaraan
Controller
9.4 Contoller/ Inverter sebagaimana dimaksud pada pasal 3 huruf d harus
memenuhi persyaratan pemasangan sebagai berikut:
10 (a) Dipasang berdekatan dengan motor listrik;
11 (b) Dipasang dengan mempertimbangkan pendinginan controller secara
optimal selama kendaraan beroperasi
Inlet Pengisian
9.5 Inlet pengisian baterai sebagaimana dimaksud pada pasal 3 huruf e harus
meenuhi persyaratan pemasangan sebagai berikut:
12 (a) Dipasang dengan aman dan ditempatkan pada posisi awal inlet
pengisian bahan bakar;
13 (b) Dilengkapi dengan interlock yang melumpuhkan kendaraan ketika
kabel pengisian terhubung, terlepas, dari adanya tegangan pengisian.
Peralatan Pendukung
9.6 Peralatan pendukung lainnya sebagaimana dimaksud pada pasal 3 huruf f harus
memenuhi persyaratan pemasangan sebagai berikut:
14 (a) Semua koneksi ke sistem tegangan tinggi sebagaimana dimaksud pada
harus menyatu sedekat mungkin dengan akumulator termasuk kabel kecil seperti kabel sensor pada shunt arus atau volt-meter
15 (b) Saklar isolasi pemeliharaan harus terpasang di posisi yang mudah
dijangkau dan mempunyai warna yang mencolok dan dapat melepaskan kedua kutub dari akumulator;
16 (c) Semua peralatan pendukung system kendaraan bermotor listrik harus
terisolasi dengan baik, dengan mempertimbangkan sistem tegangan operasi dan tidak terhubung secara elektrik ke sasis atau badan kendaraan, secara efektif disegel atau tahan terhadap intrusi debu atau kelembaban;
17 (d) Kabel listrik dimasukkan ke dalam rumah pelindung yang tertutup rapat
18 (e) Kabel listrik yang membawa beban arus tinggi dan atau tegangan tinggi, harus berwarna oranye, dan jika kabelnya disembunyikan dalam saluran, saluran tersebut harus berwarna oranye
19 (f) Kabel listrik mempunyai ukuran atau kemampuan yang memungkinkan
dapat meneruskan arus puncak tinggi dalam hal kejut, pengereman regeneratif tinggi, atau akselerasi tinggi, sekurang-kurangnya 1.5 kali peringkat arus kontinu motor atau pengontrol;
20 (g) Kabel listrik didukung dan diamankan secara memindai ke sasis atau
bagian struktural lainnya dengan interval kurang dari 350 mm;
21 (h) Kabel listrik diposisikan pada sasis atau bagian struktural lainnya
sedemikian rupa sehingga terlindung dari kerusakan yang tidak disengaja akibat kondisi jalan;
22 (i) Kabel listrik yang memiliki koneksi listrik dengan perbedaan tegangan
yang besar dan kemampuan arus tinggi yang diposisikan terpisah, sehingga dapat meminimalkan kemungkinan hubungan arus pendek;
23 (j) Kecuali di kompartemen tertutup, memiliki tutup pelindung atas
koneksi langsung termasuk terminal apa pun;
24 (k) Dapat menahan gerakan di bawah muatan listrik, getaran, atau termal
yang tinggi
25 (l) Dilindungi secara memadai saat melewati sekat dan memiliki konektor
akhir listrik yang secara efektif dikerutkan ke kabel, dan tidak disolder
26 (m) Kabel listrik yang mempuntai tegangan besar diposisikan terpisah,
sehingga dapat meminimalkan potensi hubungan arus pendek atau pemanasan berlebih;
27 (n) Kabel listrik tidak diposisikan di dalam atap, pilar tubuh atau kusen
luar;
28 (o) Kabel listrik tidak membentuk tikungan tajam;
29 (p) Perangkat proteksi arus berlebih meiliki nilai antara 20% dan 40% dari
arus maksimal system kendaraan listrik, untuk melindungi kabel listrik dan komponen penggerak listrik dari kerusakan;
30 (q) Sistem kelistrikan dirancang sedemikian rupa untuk memastikan bawa
BAB III
STATUS LUARAN
Luaran dari penelitian ini adalah:
3.1.. Spesifikasi teknis main component battery electric vehicle
a. Motor Listrik
1. Jenis : Motor listrik BLDC
2. Kapasitas : 5 kW 3. Voltage : 48 volt 4. Top speed : 3000 rpm b. Motor kontroler 1. Jenis : DC controller 2. Voltage : 48 volt
3. Accelerator : Adjustable Inductive Accelerator Continuously Variable Speed System c. Battery
1. Jenis : Baterai basah
2. Kapasitas : 150 Ah 3. Voltage : 12 volt 4. Jumlah : 4 unit 5. Susunan : seri 6. Charging : 6 jam d. Wiring sistem
Gambar 3.1 Sistem wiring prototype battery electric vehicle
3.2.. Prototype battery electric vehicle
BAB IV
PERAN MITRA
Proses pengembangan platform dan prototyping battery electric vehicle bekerja sama dengan mitra industry:
1. Workshop Top Seven
Workshop Top 7 merupakan bengkel mobil yang berada di daerah keputih tegal timur yang melayani berbagai treatment untuk mobil anda seperti : Body repair, Body painting, Modifikasi/ Custom, Onderstel, Poles, dan Ac.
Pada penelitian ini workshop top 7 berperan melakukan pabrikasi terhadap rolling chassis hasil rancangan dari peneliti.
2. Workshop Ajwa teknik
Workshop Ajwa merupakan bengkel yang berada di daerah Jl Tambak Medokan Asri Surabaya, yang melayani body repair, interior, jok, body painting, understeer, modifikasi dan custom.
Pada penelitian ini workshop Ajwa teknik berperan dalam pengerjaan body, jok, interior, dan wiring sistem yang berkoordinasi dengan peneliti.
BAB V
KENDALA PELAKSANAAN PENELITIAN
Beberapa kendala dalam pelaksanaan penelitian ini dapat diuraikan sebagai berikut:
1. Dalam hal perancangan chassis relative tidak ada kendala. Kita rancang chassis type
space frame dengan dimensi seperti ditunjukkan pada Tabel 2.1. sebagai berikut:
a. Panjang Mobil 3100 mm
b. Lebar 1400 mm
c. Tinggi 1567 mm
d. Panjang Sumbu Roda Depan Dan Belakang 2100 mm
2. Dalam hal perancanag sistem penggerak, motor listrik, control motor listrik dan
baterai, menggunakan system penggerak kendaraan Golf 4 penumpang
3. Dalam hal pembuatan body dan interior kendala keterbatasan waktu untuk
penyeleaiannya.
4. Dalam hal pengujian performansi, hanya diuji performansinya untuk penyusunan
platform battery electric vehicle
5. Masih dibutuhkan uji durability untuk mengetahui kendalan dari kendaraan battery
BAB VI
KESIMPULAN
Rangkaian kegiatan penelitian pengembangan platform battery electric vehicle ini menyimpulkan hal-hal sebagai berikut :
1. Platform battery electric vehicle
BAB VII
DAFTAR PUSTAKA
1. The Design, Development and Future of Electric Vehicle 2. Components and Systems for Electric Vehicles (HEVs/EVs)
3. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development
4. Overview of Electric Vehicles (EVs) and EV Sensors
5. The Design and Construction of a Battery Electric Vehicle Propulsion System – High Performance Electric Kart Application
6. Design and Assessment of Battery Electric Vehicle Powertrain, with Respect to Performance, Energy Consumption and Electric Motor Thermal Capability
7. Enhanced Regenerative Braking Strategies for Electric Vehicles: Dynamic Performance and Potential Analysis
8. www_inside4tech_com_wp_content_uploads_2016_06_The_Top_Battery
9. Towards advanced BMS algorithms development for (P)HEV and EV by use of a physics-based model of Li-ion battery systems
10. Materials For Power Storage Systems Electric And Hybrid Vehicle Solutions
11. Electric car demand could see UK build a gigafactory for batteries ‘within three years’ 12. EXCAR putih 14 Seater 72V bus wisata listrik mobil listrik china
13. Suzhou Eagle Electric Vehicle Manufacturing
14. Brown, J., Robertson, J., and Serpents, S., 2002. “Motor Vehicle Structures: Concepts and Fundamentals”, Butterworth-Heinemann, ISBN 0-7506-5134-2, pp.1063, Oxford.
15. Kassahun Mekonnen, 2008. “Static and Dynamic Analysis of commerical vehicle with Van body”,M. Sc. Thesis, Addis Ababa University, Addis Ababa.
16. Kawade R.K. et al, 2015. “Chassis Frame Torsional Stiffness Analysis” Department of Mechanical Engineering, Dr DY Patil Institute of Technology Pimpri, ISSN 2321-0613, Pune India
17. Sandalow David, 2009. “Plug-In Electric Vehicles: What Role for Washington?”, Department of Transport Studies, University of Westminster, ISBN 978-0-81570305-1, United Kingdom
18. Teo Han Fui et al, 2007. “Statics And Dynamics Structural Analysis Of A 4.5 Ton Truck Chassis” Faculty of Mechanical Engineering, Universiti Teknologi Malaysia, Malaysia,. 19. Ramadhan M.T. et al, 2015 “Pengaturan Kecepatan Motor DC pada Mobil Listrik
Menggunakan Bidirectional Buck-Boost Cascade Converter Berbasis Fuzzy Logic Controller” Jurusan Teknik Elektro, Institut Teknologi Sepuluh Nopember (ITS), ISSN 2337-3539, Surabaya
20. William J. Sidelko, 1976, An Objective Approach to Highway Truck Frame Design, SAE Technical Paper 660162.
21. Zumain M.A., 2009, “Prototipe Mobil Listrik Dengan Menggunakan Motor DC Magnet Permanen 0,37 HP” Fakultas Teknik, Universitas Indonesia, Depok.
BAB VIII
LAMPIRAN
LAMPIRAN 1 Tabel Daftar Luaran
LAMPIRAN 2 Log Book Kegiatan Pabrikasi Platform BEV. LAMPIRAN 3 List Part I-CAR ITS
LAMPIRAN 1 Tabel Daftar Luaran
Program : Penelitian Unggulan ITS
Nama Ketua Tim : Dr. Bambang Sudarmanta
Judul : PENGEMBANGAN PLATFORM BATTERY ELECTRIC
VEHICLE UNTUK MENDUKUNG AUTONOMOUS CAR ITS
1.Artikel Jurnal
No Judul Artikel Nama Jurnal Status Kemajuan*)
1 Pengembangan Platform Battrey
Electric Vehicle untuk Mendukung Autonomous Car ITS
Journal Mechanical Engineering and Sains
Draft
*) Status kemajuan: Persiapan, submitted, under review, accepted, published 2. Artikel Konferensi
No Judul Artikel Nama Konferensi (Nama
Penyelenggara, Tempat, Tanggal)
Status Kemajuan*)
- - - -
*) Status kemajuan: Persiapan, submitted, under review, accepted, presented 3. Paten
No Judul Usulan Paten Status Kemajuan
- - -
*) Status kemajuan: Persiapan, submitted, under review 4. Buku
No Judul Buku (Rencana) Penerbit Status Kemajuan*)
- - - -
*) Status kemajuan: Persiapan, under review, published 5. Hasil Lain
No Nama Output Detail Output Status Kemajuan*)
1 Prototipe Battery Electric Vehicle Sudah jadi
6. Disertasi/Tesis/Tugas Akhir/PKM yang dihasilkan
No Nama Mahasiswa NRP Judul Status*)
43
LAMPIRAN 2 Log Book Kegiatan Pabrikasi Platform BEV
NO TANGGAL KEGIATAN HASIL DOKUMENTASI KETERANGAN
Tempat: STP Otomotif ITS
2 16-Jun-20
suspensi front Tempat: PUI SKO ITS
13
12 6-Aug-20 Drawing rear part rear part Tempat: PUI SKO ITS
LOG BOOK KEGIATAN PENELITIAN PLATFORM DAN PROTOTYPING BEV UNTUK MENUNJANG AUTONOMOUS ITS
Tempat: PUI SKO ITS
7 14-Jul-20 Study literatur chassis rancangan chassis - Tempat: PUI SKO ITS
6 6-Jul-20 Study literatur motor BLDC rancangan motor bldc - Tempat: PUI SKO ITS
1 8-Jun-20 Koordinasi pelaksanaan penelitian Time schedule penyelesaian penelitian
8 22-Jul-20 Evaluasi internal kemajuan 1 evaluasi
11 3-Aug-20 Drawing front part
Drawing suspensi suspensi rear koordinasi dengan tim autonomous ITS
front part
Simulasi battery pack data sheet battery pack Tempat: PUI SKO ITS
10 30-Jul-20 Drawing steering sistem steering
Tempat: PUI SKO ITS
14
10-Aug-20
14-Aug-20 Drawing suspensi
Drawing battery pack battery pack Tempat: PUI SKO ITS
15 18-Aug-20
Tempat: Robotika ITS
3 24-Jun-20 Diskusi tim peneliti dan pembantu peneliti Jadwal koordinasi internal
Review paper dan data sheet mobil EV Review paper EV - Tempat: PUI SKO ITS
Tempat: STP Otomotif ITS
4 30-Jun-20 sinkronisasi kegiatan
-Tempat: PUI SKO ITS
5 2-Jul-20 Study literatur battery rancangan baterai
-Tempat: PUI SKO ITS
Tempat: PUI SKO ITS
9 28-Jul-20
Parameter Nilai Satuan
Total Battery Capacity 11 KWh Jenis Cell Battery
Li ion (Li NCA, Nickel Cobalt Alummina) Total Number of cell 637 Cell
Current 4,8 Ah
Voltage 3,6 Volt Capacity Cell battery 17,28 Wh Weight cell battery 70 gram Dimension cell
Diameter 21 mm
Height 70 mm
Volume 24232,95 mm3 Content 24 cell Weight module battery 1,68 Kg Arrangement Cell in Module opsi 1 4 cell x 6 Dimension module
Length 84 mm
Rancangan Battery Pack untuk Platform BEV 10 kW Battery
Cell Battery
44 proses assembly komponen
proses assembly komponen
Evaluasi internal kemajuan 2
Mempelajari silumasi pembebanan
evaluasi pembebanan chassis
18 31-Aug-20 assembly komponen
19
Mendetailkan rancangan chassis rancangan chassis
1-Sep-20 evaluasi kemajuan
17 28-Aug-20 assembly komponen Tempat: PUI SKO ITS
Tempat: PUI SKO ITS
assembly komponen proses assembly komponen
24-Aug-20
Tempat: STP Otomotif ITS
16
Simulasi battery pack data sheet battery pack Tempat: PUI SKO ITS
15 18-Aug-20
20 3-Sep-20
11-Sep-20
14-Sep-20 evaluasi simulai CG chassis hasil evaluasi letak CG foto /terlampir
24 12-Sep-20 23 16-Sep-20 26 25 27 28 29 18-Sep-20 21-Sep-20
Tempat: PUI SKO ITS
hasil simulasi Tempat: PUI SKO ITS
simulasi CG chassis letak CG
pembebanan chassis foto /terlampir Tempat: PUI SKO ITS
Proses pembuatan prototyping Chassis BEV Workshop Top7
Setting penempatan roda
Proses pemasangan suspensi
Proses pembuatan spacer
Tempat: PUI SKO ITS
22 9-Sep-20 Simulasi pembebanan chassis
Tempat: PUI SKO ITS
21 7-Sep-20 simulasi beban foto /terlampir
Tempat: PUI SKO ITS Tempat: PUI SKO ITS
23-Sep-20
titik penempatan sudah selesai
suspensi terpasang
spacer sudah terpasang
Workshop Top7
Workshop Top7
Workshop Top7
Parameter Nilai Satuan
Total Battery Capacity 11 KWh Jenis Cell Battery
Li ion (Li NCA, Nickel Cobalt Alummina) Total Number of cell 637 Cell
Current 4,8 Ah
Voltage 3,6 Volt Capacity Cell battery 17,28 Wh Weight cell battery 70 gram Dimension cell
Diameter 21 mm
Height 70 mm
Volume 24232,95 mm3
Content 24 cell
Weight module battery 1,68 Kg Arrangement Cell in Module opsi 1 4 cell x 6 Dimension module
Length 84 mm
Width 126 mm
Height 70 mm
Volume 740880 mm3 Koneksi cell parallel Dimension battery pack
84 length x 5 Length 420 mm 126 width x 1 Width 126 mm 70 height x 6 Height 420 mm Space fuse & kontaktor 2963520 mm3 Volume 22226400 mm3
Weight 49 Kg
Sistem Charging
Daya Charging 2,2 KW Arus Charging 20 A waktu charging, KWH/charging 5,00 h
Jarak tempuh battery
1 kwh rata-rata jarak tempuh 6 km 8 km Total jarak tempuh battery 66 km 88 km
Battery Pack
Rancangan Battery Pack untuk Platform BEV 10 kW Battery
Cell Battery
Pengecetan epoxy chassis sudah selesai Workshop Top7
39 14-Oct-20 Pengerjaan detail body belakang on progres PUI SKO ITS
37 8-Oct-20 Pengerjaan body belakang body belakang selesai PUI SKO ITS
38 10-Oct-20 Pengerjaan body samping depan on progres PUI SKO ITS
34 3-Oct-20 Setting tempat duduk depan on progres
33
31 draf laporan kemajuan
wiring oke Penyusunan laporan kemajuan
32 30-Sep-20 28-Sep-20 2-Oct-20 Pengecekan wiring 29 25-Sep-20 30
Pembuatan dudukan pedal
foto /terlampir Tempat: PUI SKO ITS
Proses pemasangan wiring wiring terpasang Workshop Top7
Proses pembuatan spacer
Workshop Top7
pedal terpasang
23-Sep-20 spacer sudah terpasang Workshop Top7
Workshop Top7
Workshop Top7
35 6-Oct-20 Pembuatan dudukan baterai Sudah terpasang Workshop Top7
39 14-Oct-20 Pengerjaan detail body belakang on progres PUI SKO ITS
40 15-Oct-20 Pembuatan dudukan lampu belakang selesai PUI SKO ITS
41 16-Oct-20 Pembuatan rangka seat belakang on progres PUI SKO ITS
44 22-Oct-20 Pembuatan body samping selesai PUI SKO ITS
42 18-Oct-20 pembuatan dashboard on progres PUI SKO ITS
43 20-Oct-20 pembuatan dudukan lampu depan selesai PUI SKO ITS
45 24-Oct-20 Proses pendempulan body Selesai PUI SKO ITS
47 27-Oct-20
pengecatan dasar body selesai PUI SKO ITS
46 25-Oct-20
Pengecatan utama body selesai PUI SKO ITS
50 1-Nov-20 pemasangan interior selesai PUI SKO ITS
48 29-Oct-20 pemasangan lantai dan jok selesai PUI SKO ITS
56 9-Nov-20 Launching dengan Rektor Selesai Gedung Rektorat
54 7-Nov-20 pemasangan S.O.P pemakaian Icar selesai PUI SKO ITS
PUI SKO ITS
55 8-Nov-20 pemasangan stiker pada body selesai
50 1-Nov-20 pemasangan interior selesai PUI SKO ITS
49 31-Oct-20 pemasangan dashboard selesai PUI SKO ITS
53 6-Nov-20 pemasangan lampu depan dan belakang selesai PUI SKO ITS
51 2-Nov-20 pemasangan sistem charging selesai PUI SKO ITS
LAMPIRAN 3 List Part I-CAR ITS
1 Emergency Button Switch Aftermarket 1 Beli Tombol lingkaran merah
disable/enable kemampuan kendaraan untuk berakselerasi Pada dashboard kendaraan di kiri steering coloum
2 Forward/Reverse Switch 1 Beli Switch 2 posisi mengubah arah melaju kendaraan
Pada dashboard kendaraan di kanan steering coloum
3 Key Contact Switch 1 Beli Switch putar 2 posisi
menggunakan kunci
menyalakan atau mematikan sistem jalan kendaraan
Pada dashboard kendaraan di kanan steering coloum
4 Light Switch Switch aftermarket 1 Beli Switch 2 posisi mematikan atau menyalakan lampu kendaraan
Pada dashboard kendaraan di kanan steering coloum
5 Battery Indicator Yamaha Golf Cart 1 Beli LED strip battery indicator memonitor daya yang ada pada baterai
Pada dashboard kendaraan di kanan steering coloum
6 Horn Button Switch Aftermarket 1 Beli Tombol spring hitam membunyikan klakson kendaraan
Pada dashboard kendaraan di kanan steering coloum
7 RUN/TOW Switch Switch 1 Beli Switch putar 2 posisi mengubah mode kendaraan menjadi RUN atau TOW
Pada bagasi belakang kendaraan di kiri baterai
8 Lead Acid Battery 12V 150Ah Trojan T-1275 4 Beli Batre Aki 12V Trojan 150 Ah media penyimpan dan penyalur daya kendaraan Pada bagasi belakang kendaraan
9 Battery Charger Yamaha Golf Cart 1 Beli Port charger 16A Fort colokan untuk mengisi daya kendaraan
Pada bagasi belakang kendaraan di kanan baterai
10 LED Front Lamp Aftermarket, daymaker KW 2 Beli menerangi jalan pada depan kendaraan Pada depan kendaraan
11 LED Back Lamp Custom 2 Bikin sebagai lempu merah belakang kendaraan Pada belakang kendaraan
12 Main Wiring Bundle Yamaha Golf Cart 1 Beli, Rakit sendiri Kabel untuk keperluan elektronik kendaraan Untuk keperluan listirk kendaraan Di seluruh kendaraan
13 Electric Motor Hitachi 5kW (Yamaha Golf Cart) 1 Beli Kontroller Motor sebagai kontroller motor dan kendaraan
Di bawah bangku belakang
14 Motor Controller Yamaha Golf Cart 1 Beli Motor penggerak kendaraan sebagai penggerak kendaraan sesumbu dengan roda belakang
15 48V Relay 1 Beli Relay NO 48V
sebagai pemutus atau penghubung arus dari baterai ke motor
di samping motor controller
16 Fuse 3A and Housing 1 Beli Fuse 2 kaki 3 A sebagai pengaman arus berlebih pada sistem
di bawah bangku belakang, pada wiring
17 Accelerator Sensor 1 Beli Potensiometer rotation position sensor sebagai input nilai akselerasi kendaraan pada mekanisme pedal acceleratr
18 Transmisi+Axle 1 Beli
-1 Chassis Custom, Steel G3131 sphc 1 Bikin Sendiri Top 7 Garage
-2 Body style Custom, Plat Galvanis tebal 1mm
dan 1.2mm, dempul 1 Bikin Sendiri Top 7 Garage
-3 Painting and Aksesoris Custom 1 Bikin Sendiri Top 7 Garage
4 Interior Custom, Plat Galvanis tebal
1mm dan 1.2mm 1 Bikin Sendiri
5 Plafon, door trim Custom, Kayu triplek tebal
3mm, cushion vinyl krem L300 1 Bikin Sendiri
6 Jok Custom, Dudukan Plat Galvanis,
Busa+Kulit sintetis 1 Bikin Sendiri
Placement Electrical, Power and Control
Quantit y
Body, chassis, dan Interior Spesifikasi
Part Beli/Bikin Sendiri Description Function
No
Yamaha Golf Cart
Yamaha Golf Cart
49 1 Column 1 -2 Bolt, Flange 4 -3 Holder 1 4 Rod, Steering 1 5 Holder 1 6 Wheel, Steering 1 7 Nut, Self-Locking 1 8 Washer 1 9 Nut, Self-Locking 2 10 Pin, Cotter 2 11 Steering Assy 1 12 Gear Pinion 1 13 Circlip 1 14 Bearing, Steering 1 15 Gear Rack 1 16 Cover Adjust 1 17 Spring, Pressure 1 18 Pad, Pressure 1 19 Ring, Stopper 1 20 Seal 1 21 Band 2 22 Seal Dust 1 2 23 Rod,Tie 2 2 24 Bush, Cap 1 25 Circlip 1 26 Washer, Lock 1 2 27 Nut 1 2 28 Joint, Universal 1 2 29 Bolt, Flange 4 30 Joint 1 1 31 Bolt, Flange 2 32 Washer, Plate 2 33 Holder 1 1 34 Holder 2 1 35 Screw, Tapping 2 36 Washer, Plate 2 37 Spring, Conical 2 38 Collar 2 39 Label, Warning 1
1 Rim Opsi1 15 inch alloy rim 4 Beli Aftermarket Borbet
2 Tire Opsi1 185/55 R15 (front and rear) 4
1 Front Lower Arm Comp 2
2 Bush,Solid 2 3 Bush 2 4 Knuckle, Steering 1 1 5 Arm, Knuckel 1 2 6 Bolt, flange 4 7 Nut, U flange 12 8 Pin, Cotter 8 9 Bolt, Flange 2 10 Spacer 2 11 Bush,solid 4 12 Cover, Thrust 1 4 13 Knuckle, Steering 2 1 14 Bolt, Flange 4
15 Shock Absorber assy 1 1
16 Collar 2
17 Cover, Thrust 1 4
18 Bolt, Flange 2
19 Nut,U 2
20 Shock Absorber assy 1 2 1
21 Bolt, Flange 2 22 Hub, Front 2 23 Bolt, Serration 4 24 Bearing 2 25 Bearing 2 26 Collar 2 27 Oil Seal 2 28 Washer, Conical 2 29 Nut, U 2
30 Cover, Hub dust 2
1 Rear Arm Comp 1
2 Bush 1 1 3 Bolt, Flange 1 4 Nut 1 5 Bolt 2 6 Washer, Spring 2 7 Washer, Plate 2 8 Bush 2 2 9 Bolt, Flange 2
10 Nut, Self Locking 2
11 Washer, Plate 2
12 Rod, Connecting 2 1
Vehicle Dynamic
Yamaha Golf Cart
Steering system
Yamaha Golf Cart
Beli
Beli
Beli
Type Mobil YDREX
Type Mobil YDREX
Type Mobil YDREX
MacPherson strut, independent suspension system Front Suspension
Coil spring, shock absorber with 3-link rigid axle and isolated trailling arm. Rear Suspension
1 Column 1 -2 Bolt, Flange 4 -3 Holder 1 4 Rod, Steering 1 5 Holder 1 6 Wheel, Steering 1 7 Nut, Self-Locking 1 8 Washer 1 9 Nut, Self-Locking 2 10 Pin, Cotter 2 11 Steering Assy 1 12 Gear Pinion 1 13 Circlip 1 14 Bearing, Steering 1 15 Gear Rack 1 16 Cover Adjust 1 17 Spring, Pressure 1 18 Pad, Pressure 1 19 Ring, Stopper 1 20 Seal 1 21 Band 2 22 Seal Dust 1 2 23 Rod,Tie 2 2 24 Bush, Cap 1 25 Circlip 1 26 Washer, Lock 1 2 27 Nut 1 2 28 Joint, Universal 1 2 29 Bolt, Flange 4 30 Joint 1 1 31 Bolt, Flange 2 32 Washer, Plate 2 33 Holder 1 1 34 Holder 2 1 35 Screw, Tapping 2 36 Washer, Plate 2 37 Spring, Conical 2 38 Collar 2 39 Label, Warning 1
1 Rim Opsi1 15 inch alloy rim 4 Beli Aftermarket Borbet
2 Tire Opsi1 185/55 R15 (front and rear) 4
1 Front Lower Arm Comp 2
2 Bush,Solid 2 3 Bush 2 4 Knuckle, Steering 1 1 5 Arm, Knuckel 1 2 6 Bolt, flange 4 7 Nut, U flange 12 8 Pin, Cotter 8 9 Bolt, Flange 2 10 Spacer 2 11 Bush,solid 4 12 Cover, Thrust 1 4 13 Knuckle, Steering 2 1 14 Bolt, Flange 4
15 Shock Absorber assy 1 1
16 Collar 2
17 Cover, Thrust 1 4
18 Bolt, Flange 2
19 Nut,U 2
20 Shock Absorber assy 1 2 1
21 Bolt, Flange 2 22 Hub, Front 2 23 Bolt, Serration 4 24 Bearing 2 25 Bearing 2 26 Collar 2 27 Oil Seal 2 28 Washer, Conical 2 29 Nut, U 2
30 Cover, Hub dust 2
1 Rear Arm Comp 1
2 Bush 1 1 3 Bolt, Flange 1 4 Nut 1 5 Bolt 2 6 Washer, Spring 2 7 Washer, Plate 2 8 Bush 2 2 9 Bolt, Flange 2
10 Nut, Self Locking 2
11 Washer, Plate 2
12 Rod, Connecting 2 1
13 Bolt 8
14 Shock Absorber Assy Rear 2 Ukuran 320 mm Bisa pake merk lain
15 Bolt, Flange 4
16 Nut, U Flange 2
Vehicle Dynamic
Yamaha Golf CartSteering system
Yamaha Golf Cart
Beli
Beli
Beli
Type Mobil YDREX
Type Mobil YDREX
Type Mobil YDREX
Type Mobil YDREX
MacPherson strut, independent suspension system Front Suspension
Coil spring, shock absorber with 3-link rigid axle and isolated trailling arm. Rear Suspension