LANDASAN TEORI
2.1 Robotika
Robot adalah sebuah alat elektro-mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu melalui kecerdasan buatan. Robot biasanya digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor. Biasanya kebanyakan robot industri digunakan dalam bidang produksi. Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun, penjelajahan bawah air dan luar angkasa, pertambangan, pekerjaan "cari dan tolong" (search and rescue), dan untuk pencarian tambang. Belakangan ini robot mulai memasuki pasaran konsumen di bidang hiburan, dan alat pembantu rumah tangga, seperti penyedot debu, dan pemotong rumput.
1.1.1 Sejarah Robot
Kata robot diambil dari kata yang berasal dari kata robota, yang mempunyai arti pekerja, dipopulerkan oleh Isaac Asimov pada tahun 1950 dalam sebuah karya fiksinya. Robot biasanya digunakan untuk tugas berat, bahaya, pekerjaan berulang dan kotor. Biasanya menunjuk robot industri digunakan dalam garis produksi. Penggunaan lainnya termasuk pembersihan limbah beracun, penjelajahan bawah air dan luar angkasa, pertambangan, cari dan tolong, dan pencarian tambang. Belakangan ini robot mulai memasuki pasaran konsumen di bidang hiburan, penyedot debu, dan pendeteksi kebocoran gas.
Perkembangan robotika pada awalnya bukan dari disiplin elektronika melainkan berasal dari ilmuwan biologi dan pengarang cerita novel maupun pertunjukan drama pada sekitar abad XVIII. Para ilmuwan biologi pada saat itu ingin menciptakan makhluk yang mempunyai karakteristik seperti yang mereka inginkan dan menuruti segala apa yang mereka perintahkan, dan sampai sekarang makhluk yang mereka ciptakan tersebut tidak pernah terwujud menjadi nyata, tapi matrak menjadi bahan pada novel-novel maipun naskah sandiwara pangung maupun film.
Baru sekitar abad XIX robot mulai dikembangkan oleh insinyur teknik, pada saat itu berbekal keahlian mekanika untuk membuat jam mekanik mereka membuat boneka tiruan manusia yang bisa bergerak pada bagian tubuhnya.
Pada tahun 1920 robot mulai berkembang dari disiplin ilmu elektronika, lebih spesifiknya pada cabang kajian disiplin ilmu
elektronika yaitu teknik kontrol otomatis, tetapi pada masa-masa itu komputer yang merupakan komponen utama pada sebuah robot yang digunakan untuk pengolaan data masukan dari sensor dan kendali aktuator belum memiliki kemampuan komputasi yang cepat selain ukuran fisik komputer pada masa itu masih cukup besar.
Robot-robot cerdas mulai berkembang pesat seiring berkembangnya komputer pada sekitar tahun1950-an. Dengan semakin cepatya kemampuan komputasi komputer dan semakin kecilnya ukuran fisiknya, maka robot-robot yang dibuat semakin memiliki kecerdasan yang cukup baik untuk melakukan pekerjan-pekerjan yang biasa dilakukan oleh manusia. Pada awal diciptakaanya, komputer sebagai alat hitung saja, perkembangan algoritma pemrograman menjadikan komputer sebagai instrumentasi yang memiliki kemampuan seperti otak manusia. Artificial intelegent atau kecerdasan buatan adalah algoritma pemrograman yang membuat komputer memiliki kecerdasan seperti manusia yang mampu menalar, mengambil kesimpulan dan keputusan berdasarkan pengalaman yang dimiliki.
Robot pertama kali dikembangkan oleh Computer Aided Manufacturing-International (CAM-1), “Robot adalah peralatan yang mampu melakukan fungsi-fungsi yang biasa dilakukan oleh manusia, atau peralatan yang mampu bekerja dengan intelegensi yang mirip dengan manusia”. Definisi kedua, dikembangkan oleh Robotics Institute of America (RIA), perkumpulan pembuat robot yang lebih menitikberatkan terhadap kemampuan nyata yang dimiliki oleh robot terhadap kemiripannya dengan manusia.
1.1.2 Jenis – jenis Robot
Secara umum, robot terbagi menjadi beberapa jenis berdasarkan struktur bentuk dan fungsinya, diantaranya adalah:
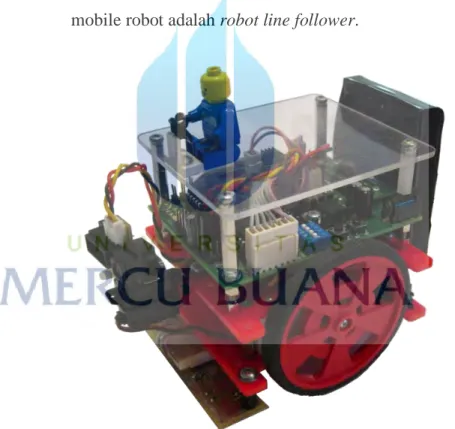
• Mobile Robot
Mobile robot alias robot bergerak adalah jenis robot yang mampu melakukan perbindahan dari tempat satu ke tempat yang lain. Biasanya robot jenis ini menggunakan penggerak berbentuk roda. Mobile robot banyak digunakan oleh para pemula untuk belajar karena strukturnya yang simpel dan mudah dipelajar. Contoh mobile robot adalah robot line follower.
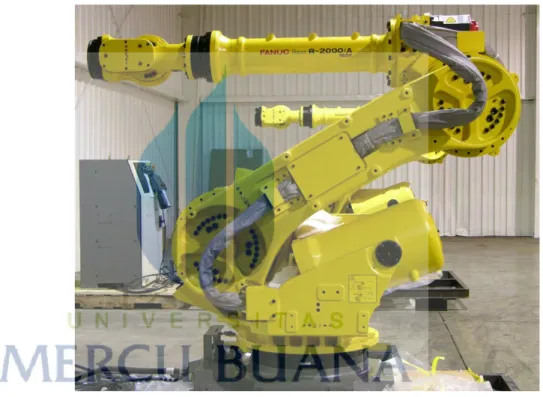
• Robot Manipulator (Arm)
Robot manipulator atau yang juga biasa disebut dengan robot tangan/arm adalah jenis robot yang memiliki struktur berbentuk tangan. Biasanya dalam satu robot manipulator terdapat bagian satu lengan lengkap mulai dari pundak, siku, telapak tangan, dan jari. Robot jenis ini biasa digunakan di bidang industri untuk mengangkat benda-benda berat.
Gambar 2.3 Contoh robot manipulator
Klasifikasi Robot Manipulator
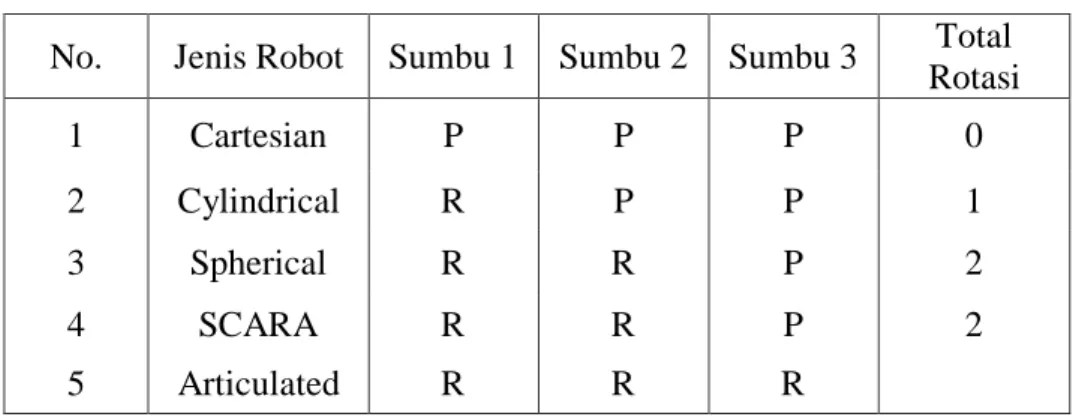
Secara umum struktur robot manipulator dapat dibedakan menurut sumbu koordinat yang digunakan, untuk lebih jelasnya diuraikan dalam tabel 2.1.
Tabel 2.1 Struktur Umum Robot Manipulator
No. Jenis Robot Sumbu 1 Sumbu 2 Sumbu 3 Total Rotasi 1 Cartesian P P P 0 2 Cylindrical R P P 1 3 Spherical R R P 2 4 SCARA R R P 2 5 Articulated R R R
Catatan : P = Prismatic joint yaitu pergeseran sepanjang sumbu tertentu
R = Revolute joint yaitu perputaran pada sumbu tertentu.
a. Robot Kartesian
Struktur Robot ini terdiri dari tiga sumbu linier (prismatic). Masing-masing sumbu dapat bergerak kearea sumbu x-y-z. Keuntungan robot ini adalah pengontrolan posisi yang mudah dan mempunyai struktur yang lebih kokoh.
Pada Gambar 2.4 memperlihatkan manipulator berkonfigurasi cartesian dimana secara relatif adalah yang paling kokoh untuk tugas mengangkat beban yang berat. Struktur ini banyak dipakai secara permanen pada instalasi pabrik baik untuk mengangkat dan memindah barang-barang produksi maupun untuk mengangkat peralatan-peralatan berat pabrik ketika melakukan kegiatan instalasi.
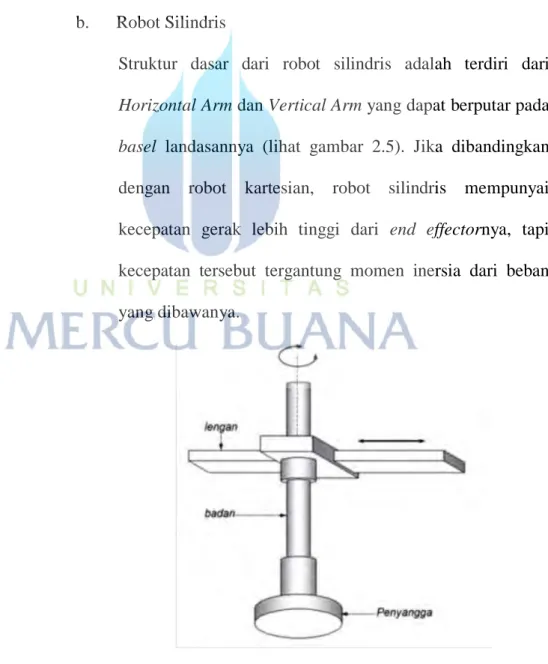
b. Robot Silindris
Struktur dasar dari robot silindris adalah terdiri dari Horizontal Arm dan Vertical Arm yang dapat berputar pada basel landasannya (lihat gambar 2.5). Jika dibandingkan dengan robot kartesian, robot silindris mempunyai kecepatan gerak lebih tinggi dari end effectornya, tapi kecepatan tersebut tergantung momen inersia dari beban yang dibawanya.
Konfigurasi silinder mempunyai kemampuan jangkauan berbentuk ruang silinder yang lebih baik, meskipun sudut ujung lengan terhadap garis penyangga tetap. Konfigurasi ini banyak diadopsi untuk sistem gantry atau crane karena strukturnya yang kokoh untuk tugas mengangkat beban.
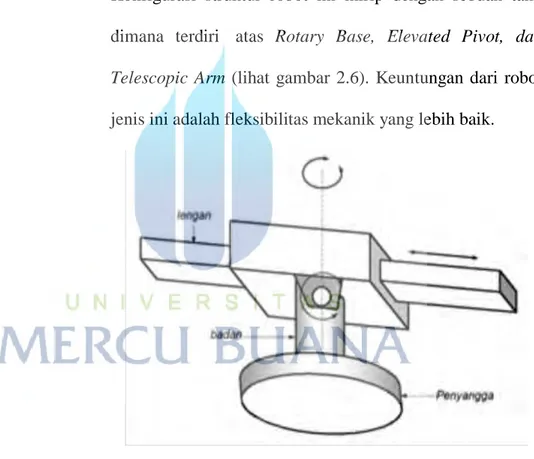
c. Robot Spheris/Polar
Konfigurasi struktur robot ini mirip dengan sebuah tank dimana terdiri atas Rotary Base, Elevated Pivot, dan Telescopic Arm (lihat gambar 2.6). Keuntungan dari robot jenis ini adalah fleksibilitas mekanik yang lebih baik.
Gambar 2.6. Konfigurasi Polar
Pada Gambar 2.6 terlihat konfigurasi polar dimana badan dapat berputar ke kiri atau kanan. Sendi pada badan dapat mengangkat atau menurunkan pangkal lengan secara polar. Lengan ujung dapat digerakkan maju-mundur secara translasi
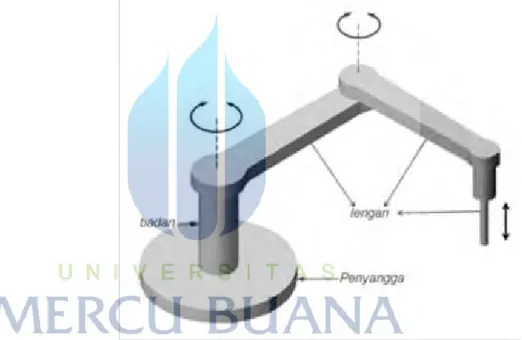
d. Robot SCARA (Selective Compliance Assembly Robot Arm) Robot Assembly bisa didesain menurut koordinat kartesian, silindris maupun spheris. Pada beberapa aplikasi hanya membutuhkan sumbu gerak vertikal, misalnya robot assembly yang memasang komponen pada PCB. Robot ini mempunyai lengan dengan dua artikulasi, sedangkan wrist mempunyai gerakan linier dan rolling. Struktur robot assembly dapat dilihat pada gambar 2.7
Gambar 2.7. Struktur robot SCARA
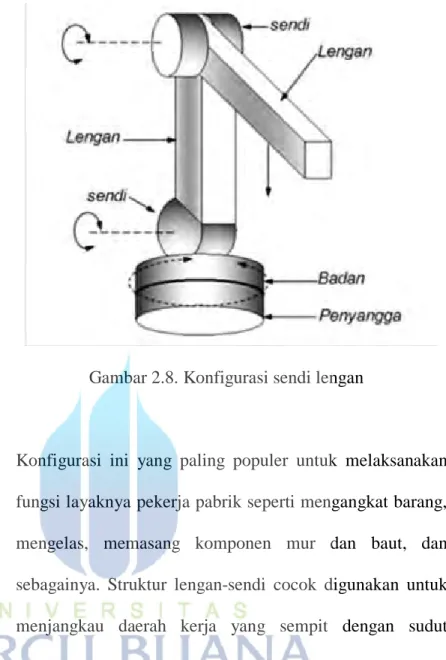
e. Robot Artikulasi / Konfigurasi Sendi Lengan
Robot ini terdiri dari tiga lengan yang dihubungkan dengan dua Revolute Joint. Elbow Joint menghubungkan Force Arm dengan Upper Arm. Shoulder Joint menghubungkan Upper Arm dengan Base. Struktur robot artikulasi ini dapat dilihat pada gambar 2.8 dibawah ini.
Gambar 2.8. Konfigurasi sendi lengan
Konfigurasi ini yang paling populer untuk melaksanakan fungsi layaknya pekerja pabrik seperti mengangkat barang, mengelas, memasang komponen mur dan baut, dan sebagainya. Struktur lengan-sendi cocok digunakan untuk menjangkau daerah kerja yang sempit dengan sudut jangkauan yang beragam.
• Robot Humanoid
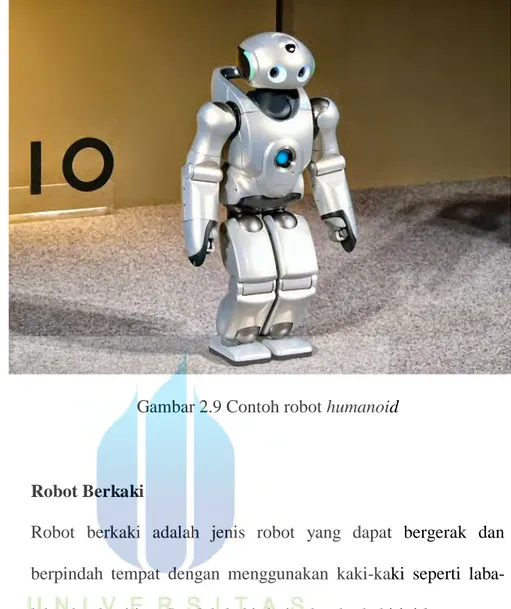
Robot humanoid adalah jenis robot yang memiliki bentuk fisik menyerupai tubuh manusia secara utuh mulai dari kepala, badan, lengan, dan kaki. Robot jenis ini biasanya memiliki sensor dan program yang kompleks. Dewasa ini banyak perusahaan teknologi yang membuat robot humanoid untuk dijual secara umum.
Gambar 2.9 Contoh robot humanoid
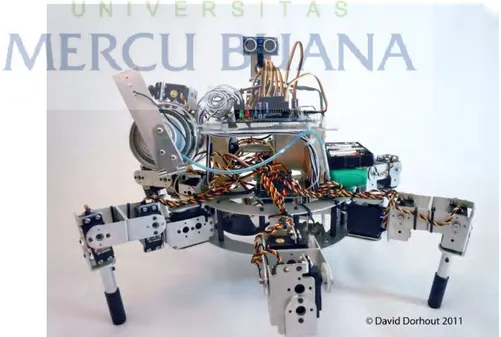
• Robot Berkaki
Robot berkaki adalah jenis robot yang dapat bergerak dan berpindah tempat dengan menggunakan kaki-kaki seperti laba-laba dan kepiting. Jumlah kaki dari robot berkaki ini bermacam-macam dapat disesuaikan dengan kebutuhan. Robot jenis ini juga biasa disebut sebagai robot serangga. Kelebihan robot ini dibanding dengan robot beroda adalah kemampuannya berjalan di berbagai permukaan. Sehingga, untuk penggunaan di permukaan yang tidak datar, seperti berbatu, berumput, berpasir dan permukaan yang tidak diprediksi sebelumnya, digunakan robot berkaki.
• Robot Terbang
Robot terbang merupakan jenis robot yang dapat bergerak di udara seperti burung dan capung. Robot jenis ini biasanya dapat dikendalikan menggunakan remote secara wireless alias tanpa kabel, atau biasa juga berjalan secara otomatis sesuai program yang telah diinputkan.
2.2 Arduino Uno
Arduino dikatakan sebagai sebuah platform dari physical computing yang bersifat open source. Arduino tidak hanya sekedar sebuah alat pengembangan, tetapi ia adalah kombinasi dari hardware, bahasa pemrograman dan Integrated Development Environment (IDE) yang canggih. IDE adalah sebuah software yang sangat berperan untuk menulis program, meng-compile menjadi kode biner dan meng-upload ke dalam memory microcontroller. Ada banyak projek dan alat-alat dikembangkan oleh akademisi dan profesional dengan menggunakan arduino, selain itu juga ada banyak modul-modul pendukung (sensor, tampilan, penggerak dan sebagainya) yang dibuat oleh pihak lain untuk bisa disambungkan dengan arduino. Arduino berevolusi menjadi sebuah platform karena ia menjadi pilihan dan acuan bagi banyak praktisi.
Salah satu yang membuat Arduino memikat hati banyak orang adalah karena sifatnya yang open source, baik untuk hardware maupun software-nya. Diagram rangkaian elektronik Arduino digratiskan kepada semua orang. Para pengguna bisa bebas men-download gambarnya, membeli komponen-komponennya, membuat PCB-nya dan merangkainya sendiri tanpa harus
membayar kepada para pembuat arduino. Sama halnya dengan IDE Arduino yang bisa di-download dan diinstal pada komputer secara gratis.
Secara umum Arduino terdiri dari dua bagian, yaitu: 1. Hardware papan input/output (I/O)
2. Software Arduino meliputi IDE untuk menulis program, driver untuk koneksi dengan komputer, contoh program dan library untuk pengembangan program.
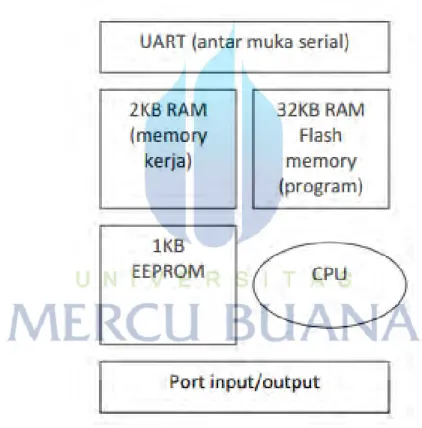
Gambar 2.10 Diagram blok sederhana dari microcontroller ATmega328 Blok-blok diatas dijelaskan sebagai berikut:
• Universal Asynchronous Receiver/Transmitter (UART) adalah antar muka yang digunakan untuk komunikasi serial seperti pada RS-232, RS-422 dan RS-485.
• 2KB RAM pada memory kerja bersifat volatile (hilang saat daya dimatikan), digunakan oleh variable-variabel di dalam program.
• 32KB RAM flash memory bersifat non-volatile, digunakan untuk menyimpan program yang dimuat dari komputer. Selain program, flash memory juga menyimpan bootloader. Bootloader adalah program inisiasi yang ukurannya kecil, dijalankan oleh CPU saat daya dihidupkan. Setelah bootloader selesai dijalankan, berikutnya program di dalam RAM akan dieksekusi.
• 1KB EEPROM bersifat non-volatile, digunakan untuk menyimpan data yang tidak boleh hilang saat daya dimatikan. Tidak digunakan pada papan Arduino. • Central Processing Unit (CPU), bagian dari microcontroller untuk
menjalankan setiap instruksi dari program.
• Port input/output, pin-pin untuk menerima data (input) digital atau analog, dan mengeluarkan data (output) digital atau analog.
Dengan mengambil contoh sebuah papan arduino uno, bagian-bagiannya dapat dijelaskan sebagai berikut:
• 14 pin input/output digital (0-13) Berfungsi sebagai input atau output, dapat diatur oleh program. Khusus untuk 6 buah pin 3, 5, 6, 9, 10 dan 11, dapat juga berfungsi sebagai pin analog output dimana tegangan output-nya dapat diatur. Nilai sebuah pin output analog dapat diprogram antara 0 – 255, dimana hal itu mewakili nilai tegangan 0 – 5V.
• USB Berfungsi untuk:
- Memuat program dari komputer ke dalam papan - Komunikasi serial antara papan dan computer -Memberi daya listrik kepada papan
• Sambungan SV1
Sambungan atau jumper untuk memilih sumber daya papan, apakah dari sumber eksternal atau menggunakan USB. Sambungan ini tidak diperlukan lagi pada papan arduino versi terakhir karena pemilihan sumber daya eksternal atau USB dilakukan secara otomatis.
• Q1 – Kristal (quartz crystal oscillator)
Jika microcontroller dianggap sebagai sebuah otak, maka kristal adalah jantung-nya karena komponen ini menghasilkan detak-detak yang dikirim kepada microcontroller agar melakukan sebuah operasi untuk setiap detak-nya. Kristal ini dipilih yang berdetak 16 juta kali per detik (16MHz).
• Tombol Reset S1
Untuk me-reset papan sehingga program akan mulai lagi dari awal. Perhatikan bahwa tombol reset ini bukan untuk menghapus program atau mengosongkan microcontroller.
• In-Circuit Serial Programming (ICSP)
Port ICSP memungkinkan pengguna untuk memprogram microcontroller secara langsung, tanpa melalui bootloader. Umumnya pengguna arduino tidak melakukan ini sehingga ICSP tidak terlalu dipakai walaupun disediakan. • IC 1 – Microcontroller Atmega
Komponen utama dari papan arduino, di dalamnya terdapat CPU, ROM dan RAM.
• X1 – sumber daya eksternal
Jika hendak disuplai dengan sumber daya eksternal, papan arduino dapat diberikan tegangan DC antara 9-12V.
• 6 pin input analog (0-5)
Pin ini sangat berguna untuk membaca tegangan yang dihasilkan oleh sensor analog, seperti sensor suhu. Program dapat membaca nilai sebuah pin input antara 0 – 1023, dimana hal itu mewakili nilai tegangan 0 – 5V.
Tanpa melakukan konfigurasi apapun, begitu sebuah papan Arduino dikeluarkan dari kotak pembungkusnya ia dapat langsung disambungkan ke sebuah komputer melalui kabel USB. Selain berfungsi sebagai penghubung untuk pertukaran data, kabel USB ini juga akan mengalirkan arus DC 5 Volt kepada papan arduino sehingga praktis tidak diperlukan sumber daya dari luar. Saat mendapat suplai daya, lampu LED indikator daya pada papan Arduino akan menyala menandakan bahwa ia siap bekerja.
Gambar 2.12 Aktifasi papan Arduino Uno
Pada papan arduino uno terdapat sebuah LED kecil yang terhubung ke pin digital no 13. LED ini dapat digunakan sebagai output saat seorang pengguna membuat sebuah program dan ia membutuhkan sebuah penanda dari jalannya program tersebut. Ini adalah cara yang praktis saat pengguna melakukan uji coba.
Umumnya microcontroller pada papan Arduino telah memuat sebuah program kecil yang akan menyalakan LED tersebut berkedip-kedip dalam jeda satu detik. Jadi sangat mudah untuk menguji apakah sebuah papan Arduino baru dalam kondisi baik atau tidak, cukup sambungkan papan itu dengan sebuah komputer dan perhatikan apakah LED indikator daya menyala konstan dan LED dengan pin-13 itu menyala berkedip-kedip.
Software Arduino yang akan digunakan adalah IDE, walaupun masih ada beberapa software lain yang sangat berguna selama pengembangan Arduino.
IDE Arduino adalah software yang sangat canggih ditulis dengan menggunakan Java. IDE Arduino terdiri dari:
• Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa processing.
• Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Bagaimanapun sebuah microcontroller tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh microcontroller adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
• Uploader, sebuah modul yang memuat kode biner dari Jomputer ke dalam memory di dalam papan Arduino.
Berikut ini adalah contoh tampilan IDE Arduino dengan sebuah sketch yang sedang diedit.
2.3 Bluetooth HC-06
Bluetooth adalah salah satu bentuk komunikasi data secara nirkabel berbasis frekwensi radio. Penggunaan utama dari modul Bluetooth ini adalah menggantikan komunikasi serial menggunakan kabel. Bluetooth terdiri dari dua jenis perangkat, yaitu Master (pengirim data) dan Slave (penerima). Modul HC-06 dari produsen koneksi secara default diset di kecepatan 9,600 bps (bisa dikustomisasi antara 1200 bps hingga 1,35 Mbps). Modul HC-06 hanya bisa berperan sebagai slave device.
Sistem mikrokontroler yang dipasang modul Bluetooth Slave dapat berkomunikasi dengan perangkat lain misal laptop yang dilengkapi adapter Bluetooth, perangkat ponsel, smartphone, gps dan lain-lain. Jadi syarat utama agar dapat terkoneksi antara dua perangkat yang memiliki modul Bluetooth adalah yang satu mode slave dan yang satu mode master. Dan syarat lain yang wajib adalah password pada waktu pairing yang diminta cocok.
Modul ini dioperasikan lewat perintah AT (AT command) yang dikirimkan secara serial. AT Command adalah perintah-perintah yang digunakan dalam komunikasi dengan serial port. Dengan AT Command kita dapat melakukan reset nama Bluetooth, reset password, reset baud rate dan melihat the version number.
Catu daya untuk untuk modul ini sebesar 3v3. Untuk pengguna Arduino bisa meyambungkan keluaran 3v3 ke pin Vcc pada modul. Besar arus yang digunakan antara 8 mA saat komunikasi hingga 30 mA saat proses pairing.
Gambar 2.14 HC- 06 Bluetooth
2.4 Motor Servo
Motor servo adalah jenis motor yang digunakan sebagai penggerak pada sistem servo (servo system) seperti pada penggerak pada kontrol posisi lengan robot. Motor servo secara struktur mesin 2 macam : dc servo motor dan ac servo motor. DC Servo motor mempunyai konstruksi yang sama dengan konstruksi motor dc. Dalam motor dc konvensional sikat dan cincin belah merupakan suatu kerugian.
Karena ada gesekan antara sikat dan cincin maka akan terjadi rugi gesek, timbulnya percikan api dan terkikisnya sikat arang maupun cincin. Maka mulai dipikirkan Motor dc tanpa sikat atau disebut Brushless DC Motor. Brushless DC Motor dapat diwujudkan dengan menggunakan prinsip kerja motor induksi 3 phasa (tanpa sikat dan cincin). Dengan menambahkan komponen permanent magnet, electronic inverter (yang menimbulkan medan putar) dan position control (umumnya menggunakan sensor effek Hall), maka akan didapatkan motor dc brushless. Jadi disini rangkaian inverter dan kontrol posisi berfungsi sebagai pengganti komutator mekanik (sikat & cincin belah)
dalam membalik medan. Motor dc brushless ini mempunyai karateristik yang mendekati dc motor konvensional.
Untuk mengerti cara kerja Motor Servo DC Magnet Permanen haruslah dimengerti bagaimana prinsip kerja Motor DC Magnet Permanen, Motor DC tanpa sikat dan medan putar. Motor servo merupakan sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali kerangkaian kontrol yang ada di dalam motor servo.
Gambar 2.15 Contoh Motor Servo
Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo
Gambar 2.16 Komponen komponen Motor Servo
2.4.1 Jenis jenis Motor Servo
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar pulsa (duty cycle) sinyal PWM pada bagian pin kontrolnya.
a. Motor Servo Standar 180˚
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90˚ sehingga total defleksi sudut kanan-tengah-kiri adalah 180˚.
b. Motor Servo Continous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batas andefleksi sudut putar (dapat berputar secara kontinyu).
2.4.2 Keunggulan Motor Servo
Keunggulan dari penggunaan motor servo adalah : • Tidak bergetar dan tidak ber-resonansi saat beroperasi.
• Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
• Penggunaan arus listik sebanding dengan beban yang diberikan. • Resolusi dan akurasi dapat diubah dengan hanya mengganti
encoder yang dipakai.
• Tidak berisik saat beroperasi dengan kecepatan tinggi.
2.4.3 Kelemahan Motor Servo
Kelemahan dari penggunaan motor servo adalah :
• Memerlukan pengaturan yang tepat untuk menstabilkan umpan balik.
• Motor menjadi tidak terkendali jika encoder tidak memberikan umpan balik.
• Beban berlebih dalam waktu yang lama akan merusak motor.
2.4.4 Cara mengendalikan Motor Servo
Servo Operasional motor servo dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum. Apabila motor servo diberikan pulsa dengan besar 1.5 ms mencapai gerakan 90°, maka bila kita berikan pulsa kurang dari 1.5 ms maka posisi mendekati 0° dan bila kita berikan pulsa lebih dari 1.5 ms maka posisi mendekati 180°.
Gambar 2.17 Posisi Motor Servo terhadap lebar pulsa
Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50 Hz. Dimana pada saat sinyal dengan frekuensi 50 Hz tersebut dicapai pada kondisi Ton duty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0°/ netral). Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar keberlawanan arah jarum jam (Counter Clock wise, CCW) dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton
duty cycle dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah jarum jam (Clock Wise, CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
2.5 Arduino BT Joystick
Arduino BT Joystick adalah aplikasi untuk smartphone android yang dikembangkan oleh HeightDev. Fungsi dari aplikasi Arduino BT Joystick adalah untuk pengontrolan suatu perangkat yang menggunakan mikrokontroller Arduino melalui tampilan yang ada pada aplikasi Arduino Bluetooth Joystick. Aplikasi ini bisa langsung diunduh pada Google Play Store pada smartphone android.
Gambar 2.18 Arduino BT Joystick
Aplikasi Arduino Bluetooth Joystick membutuhkan koneksi Bluetooth untuk menghubungkan smartphone android dengan microcontroller.
2.6 MeArm
MeArm adalah projek Open Source robot arm yang digagas oleh Benjamin Gray dan Jack Howard. Robot Arm Kami dirancang dengan sangat singkat, biaya yang sangat rendah dan menyenangkan untuk digunakan. Selain sebagai robot lengan yang kecil, keren dan menarik MeArm adalah versi miniatur dari sebuah lengan robot industri.
Gambar 2.19 Contoh Robot MeArm
MeArm terdiri dari bagian – bagian rangka lengan robot yang terbuat dari bahan akrilik yang dibentuk menggunakan cutting laser. Lengan robot MeArm membutuhkan empat buah micro servo sebagai penggeraknya dan setiap bagian dari rangka lengan robot disatukan menggunakan mur dan baut.