PENGARUH PROFIL POROS PENGGERAK TERHADAP GERAKAN SABUK DALAM SUATU SISTEM BAN BERJALAN
Ishak Nandika G., Adri Maldi S.
Abstrak
Penelitian ini bertujuan untuk mengetahui pengaruh profil sudut ketirusan dari poros penggerak sebuah sistem ban berjalan dengan sistem sabuk. Selain sudut ketirusan, penelitian ini melibatkan variabel panjang lintasan dan pengaruh pembebanan.
Poros penggerak sabuk dibuat dengan variasi sudut 0, 3, 5, 7 dan 10 derajat dengan kedalaman 1 mm untuk mendapatkan profil yang optimal. Sedangkan panjang lintasan dibuat variasi pula, yaitu: 300 mm, 500 mm dan 750 mm. Ketidakstabilan gerakan sabuk diukur dalam bentuk penyimpangan sabuk dari poros penggerak.
Pengukuran dilakukan pertama kali untuk masing-masing profil dan panjang lintasan tanpa beban. Kemudian beban ditambahkan di atas sabuk dengan variasi beban dari 5N sampai dengan 10N. Beban diharapkan dapat mempengaruhi kestabilan gerakan sabuk.
Hasil pengujian menunjukkan bahwa besarnya penyimpangan sabuk berbanding lurus dengan panjang lintasan ban berjalan. Selain dari pada itu, beban yang diberikan kurang memperlihatkan pengaruh yang signifikan terhadap kestabilan gerakan sabuk.
Kata Kunci : profil sudut poros penggerak, panjang lintasan, beban, penyimpangan
Latar Belakang
Sistem otomasi dalam suatu proses, katakanlah system pengemasan dari sebuah produk industri mempunyai keunikan masing-masing tergantung kepada produk yang dibuatnya. Proses pengemasan ini tentunya dilakukan diakhir proses produksi. Pengemasan untuk produk makanan, seperti mie instant, dapat dilakukan secara otomatis dimana per dus terisi oleh 40 bungkus mie instant.
Untuk mengatur proses pengemasan secara otomatis diperlukan suatu handling system yang melibatkan sistem ban berjalan (conveyor). Sistem ban berjalan terdiri dari berbagai tipe, namun salah satunya adalah sistem sabuk yang biasa digunakan untuk beban yang relatif ringan. Secara konstruksi, sistem ban berjalan tipe sabuk ini digerakkan oleh sebuah motor melalui sebuah poros penggerak. Peneliti berusaha untuk melihat lebih detil pengaruh konstruksi poros terhadap gerakan sabuk dalam sistem ban berjalan.
Konstruksi poros yang lurus akan menyebabkan suatu gaya yang mendorong sabuk sehingga sabuk akan keluar dari
porosnya. Untuk mengatasi hal tersebut maka poros dibuat cembung atau poros cenderung tirus dikedua ujungnya.
Adiro Gmbh1 adalah alah satu perusahaan Jerman yang berkecimpung dalam produk sistem handling yang salah satu komponennya adalah sistem ban berjalan. Adiro mempunyai sistem ban berjalan dengan lebar sabuk 50 mm, panjang poros penggerak yang digunakan 33 mm dengan diameter 25 mm. Dari pengukuran yang dilakukan oleh Peneliti, panjang profil disetiap ujung poros tersebut memerlukan 10,5 mm (sekitar 2/3 dari panjang total) sehingga bagian poros yang tidak terpotong sekitar 12 mm, yang digunakan untuk mentransmisikan gaya dari poros ke sabuk. Dengan panjang 12 mm ban berjalan masih dapat membawa beban dengan berat maksimum 9 N dengan asumsi percepatan gravitasi sebesar 9,81 m/s2. Perlu diketahui bahwa panjang efektif ban berjalan buatan Adiro ini adalah 445 mm. Profil ketirusan dikedua ujung poros berbentuk kurva atau cembung.
Rully dan Agus2 membuat sistem ban berjalan dengan lebar sabuk 50 mm menggunakan
panjang poros sebesar 53 mm. Poros ini mempunyai konstruksi yang rata namun mempunyai celah sehingga poros menyerupai roda gigi. Pembuatan poros ini relatif lebih kompleks dikarenakan poros harus dibentuk sedemikian rupa sehingga membentuk seperti roda gigi lurus.
Ban berjalan menopang masa benda dengan memanfaatkan tegangan yang terjadi pada sabuk. Hal ini berbeda dengan rancanagan Adiro yang mempuntai tumpuan dibawah sabuk ban berjalannya. Meskipun demikian, ban berjalan rancangan Ruli dan Agus masih dapat menopang beban 9 N walaupun sabuk cenderung melendut dan nyaris bergesekan dengan sabuk dibagian bawah ban berjalan. Panjang efektif ban berjalan adalah 330 mm.
Ronald H Burch3, didalam patentnya, menyatakan lebar ketirusan poros (roller) dari kedua ujungnya dan jarak dari permukaan atas sampai permukaan bawah poros serta bergerak searah dengan gerakan sabuk. Poros diatur sedemikian rupa untuk berputar menggerakkan sabuk tegak lurus terhadap sumbunya. Ronald juga menggunakan sebuah pasak yang diletakkan di atas permukaan poros dan menegaskan letak pasak untuk mengatur atau menjaga gerakan sabuk.
FloStor Conveyor Center4 menyatakan dalam Basic Introduction to Conveyor, section three, ketirusan poros penggerak memberikan permukaan yang benar untuk menggerakkan sabuk. Bentuk ketirusan poros dinyatakan dalam bentuk kurva. Artinya, ketirusan dikedua ujung poros tidak linier melainkan berbentuk kurva (cembung). Bentuk ini yang menyebabkan sabuk datang dan meningalkan poros kurang lebih pada posisi yang sama. Untuk hasil yang baik, kurva ketirusan poros minimum 2/3 dari panjang poros. Hal ini sesuai dengan hasil pengukuran pada alat peraga produk Adiro Gmbh.
Dalam penelitian ini, Peneliti mengidentifikasi pengaruh profil poros terhadap gerakan sabuk
yang dikombinasikan dengan panjangnya sistem ban berjalan.
Metoda Penelitian
Peneliti merancang tiga buah poros penggerak ban berjalan dengan profil ketirusan yang berbeda dikedua ujungnya, yaitu: 0, 3, 5, 7 dan 10 derajat. Proses pengukuran akan berjalan secara seri dengan menggunakan masing-masing poros penggerak.
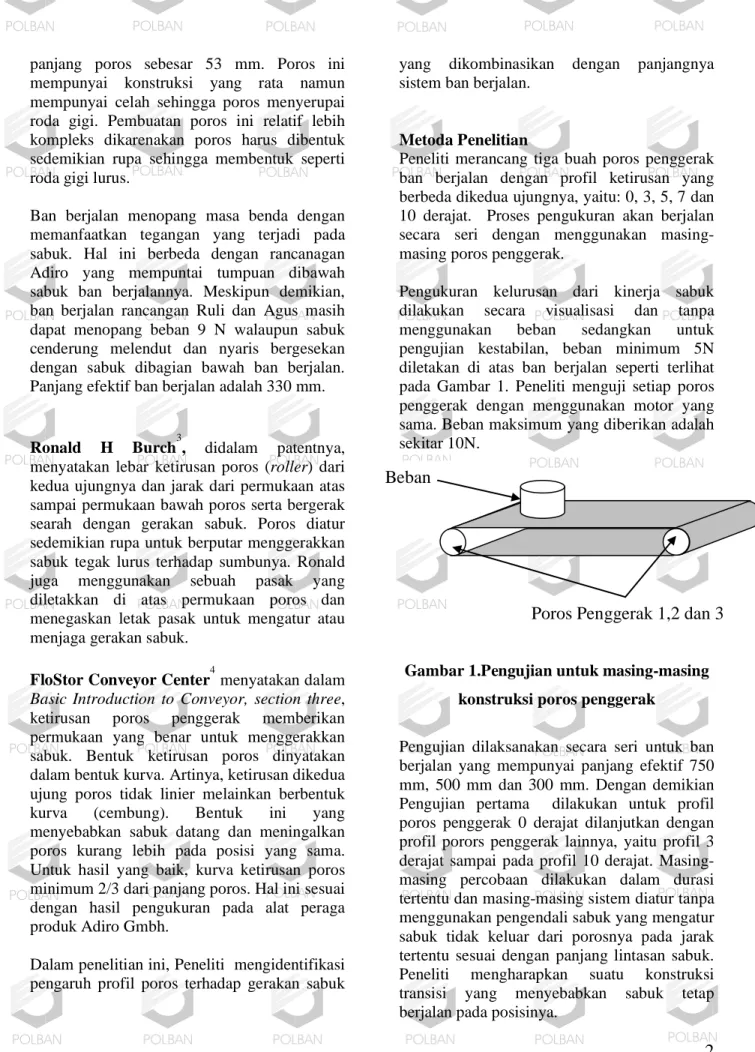
Pengukuran kelurusan dari kinerja sabuk dilakukan secara visualisasi dan tanpa menggunakan beban sedangkan untuk pengujian kestabilan, beban minimum 5N diletakan di atas ban berjalan seperti terlihat pada Gambar 1. Peneliti menguji setiap poros penggerak dengan menggunakan motor yang sama. Beban maksimum yang diberikan adalah sekitar 10N.
Gambar 1.Pengujian untuk masing-masing konstruksi poros penggerak
Pengujian dilaksanakan secara seri untuk ban berjalan yang mempunyai panjang efektif 750 mm, 500 mm dan 300 mm. Dengan demikian Pengujian pertama dilakukan untuk profil poros penggerak 0 derajat dilanjutkan dengan profil porors penggerak lainnya, yaitu profil 3 derajat sampai pada profil 10 derajat. Masing-masing percobaan dilakukan dalam durasi tertentu dan masing-masing sistem diatur tanpa menggunakan pengendali sabuk yang mengatur sabuk tidak keluar dari porosnya pada jarak tertentu sesuai dengan panjang lintasan sabuk. Peneliti mengharapkan suatu konstruksi transisi yang menyebabkan sabuk tetap berjalan pada posisinya.
Poros Penggerak 1,2 dan 3
Beban
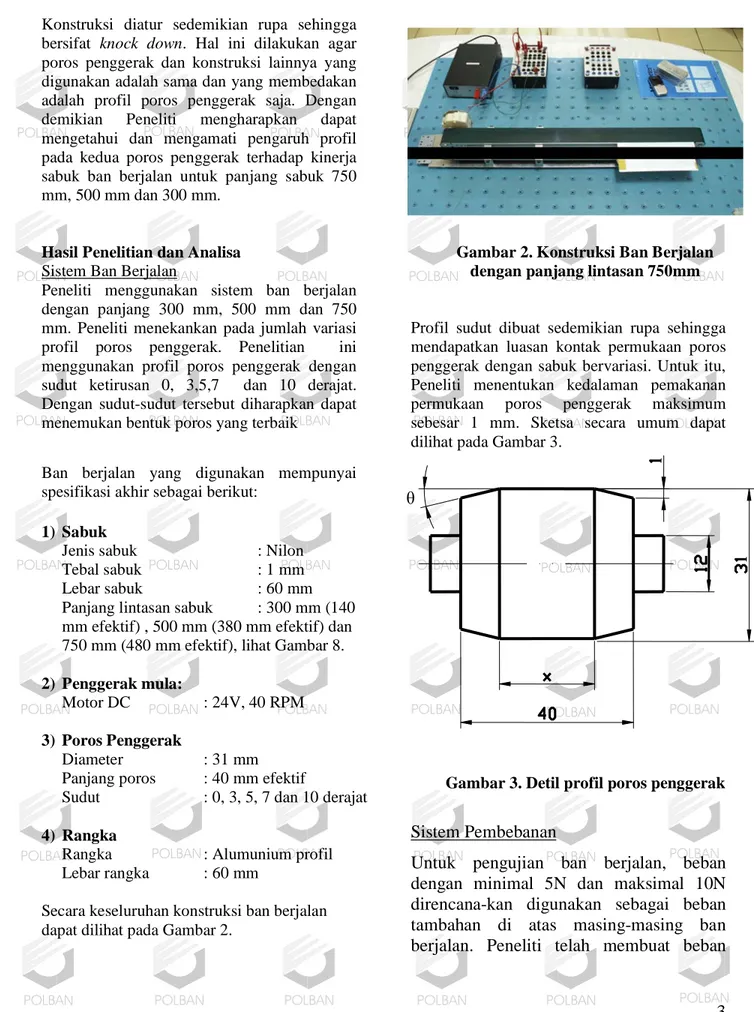
Konstruksi diatur sedemikian rupa sehingga bersifat knock down. Hal ini dilakukan agar poros penggerak dan konstruksi lainnya yang digunakan adalah sama dan yang membedakan adalah profil poros penggerak saja. Dengan demikian Peneliti mengharapkan dapat mengetahui dan mengamati pengaruh profil pada kedua poros penggerak terhadap kinerja sabuk ban berjalan untuk panjang sabuk 750 mm, 500 mm dan 300 mm.
Hasil Penelitian dan Analisa
Ban berjalan yang digunakan mempunyai spesifikasi akhir sebagai berikut:
Sistem Ban Berjalan
Peneliti menggunakan sistem ban berjalan dengan panjang 300 mm, 500 mm dan 750 mm. Peneliti menekankan pada jumlah variasi profil poros penggerak. Penelitian ini menggunakan profil poros penggerak dengan sudut ketirusan 0, 3,5,7 dan 10 derajat. Dengan sudut-sudut tersebut diharapkan dapat menemukan bentuk poros yang terbaik
1) Sabuk
Jenis sabuk : Nilon
Tebal sabuk : 1 mm
Lebar sabuk : 60 mm
Panjang lintasan sabuk : 300 mm (140 mm efektif) , 500 mm (380 mm efektif) dan 750 mm (480 mm efektif), lihat Gambar 8. 2) Penggerak mula:
Motor DC : 24V, 40 RPM 3) Poros Penggerak
Diameter : 31 mm
Panjang poros : 40 mm efektif
Sudut : 0, 3, 5, 7 dan 10 derajat 4) Rangka
Rangka : Alumunium profil Lebar rangka : 60 mm
Secara keseluruhan konstruksi ban berjalan dapat dilihat pada Gambar 2.
Gambar 2. Konstruksi Ban Berjalan dengan panjang lintasan 750mm
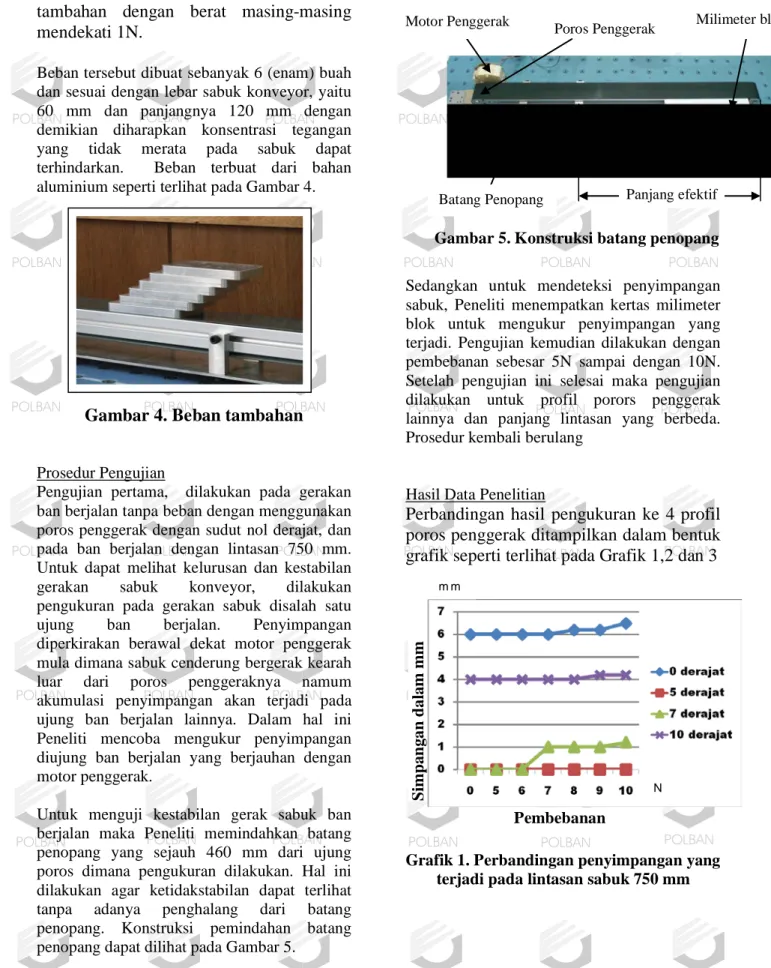
Profil sudut dibuat sedemikian rupa sehingga mendapatkan luasan kontak permukaan poros penggerak dengan sabuk bervariasi. Untuk itu, Peneliti menentukan kedalaman pemakanan permukaan poros penggerak maksimum sebesar 1 mm. Sketsa secara umum dapat dilihat pada Gambar 3.
Gambar 3. Detil profil poros penggerak
Untuk pengujian ban berjalan, beban
dengan minimal 5N dan maksimal 10N
direncana-kan digunakan sebagai beban
tambahan di atas masing-masing ban
berjalan. Peneliti telah membuat beban
Sistem Pembebanan
tambahan dengan berat masing-masing
mendekati 1N.
Beban tersebut dibuat sebanyak 6 (enam) buah dan sesuai dengan lebar sabuk konveyor, yaitu 60 mm dan panjangnya 120 mm dengan demikian diharapkan konsentrasi tegangan yang tidak merata pada sabuk dapat terhindarkan. Beban terbuat dari bahan aluminium seperti terlihat pada Gambar 4.
Gambar 4. Beban tambahan
Prosedur Pengujian
Pengujian pertama, dilakukan pada gerakan ban berjalan tanpa beban dengan menggunakan poros penggerak dengan sudut nol derajat, dan pada ban berjalan dengan lintasan 750 mm. Untuk dapat melihat kelurusan dan kestabilan gerakan sabuk konveyor, dilakukan pengukuran pada gerakan sabuk disalah satu ujung ban berjalan. Penyimpangan diperkirakan berawal dekat motor penggerak mula dimana sabuk cenderung bergerak kearah luar dari poros penggeraknya namum akumulasi penyimpangan akan terjadi pada ujung ban berjalan lainnya. Dalam hal ini Peneliti mencoba mengukur penyimpangan diujung ban berjalan yang berjauhan dengan motor penggerak.
Untuk menguji kestabilan gerak sabuk ban berjalan maka Peneliti memindahkan batang penopang yang sejauh 460 mm dari ujung poros dimana pengukuran dilakukan. Hal ini dilakukan agar ketidakstabilan dapat terlihat tanpa adanya penghalang dari batang penopang. Konstruksi pemindahan batang penopang dapat dilihat pada Gambar 5.
Gambar 5. Konstruksi batang penopang Sedangkan untuk mendeteksi penyimpangan sabuk, Peneliti menempatkan kertas milimeter blok untuk mengukur penyimpangan yang terjadi. Pengujian kemudian dilakukan dengan pembebanan sebesar 5N sampai dengan 10N. Setelah pengujian ini selesai maka pengujian dilakukan untuk profil porors penggerak lainnya dan panjang lintasan yang berbeda. Prosedur kembali berulang
Hasil Data Penelitian
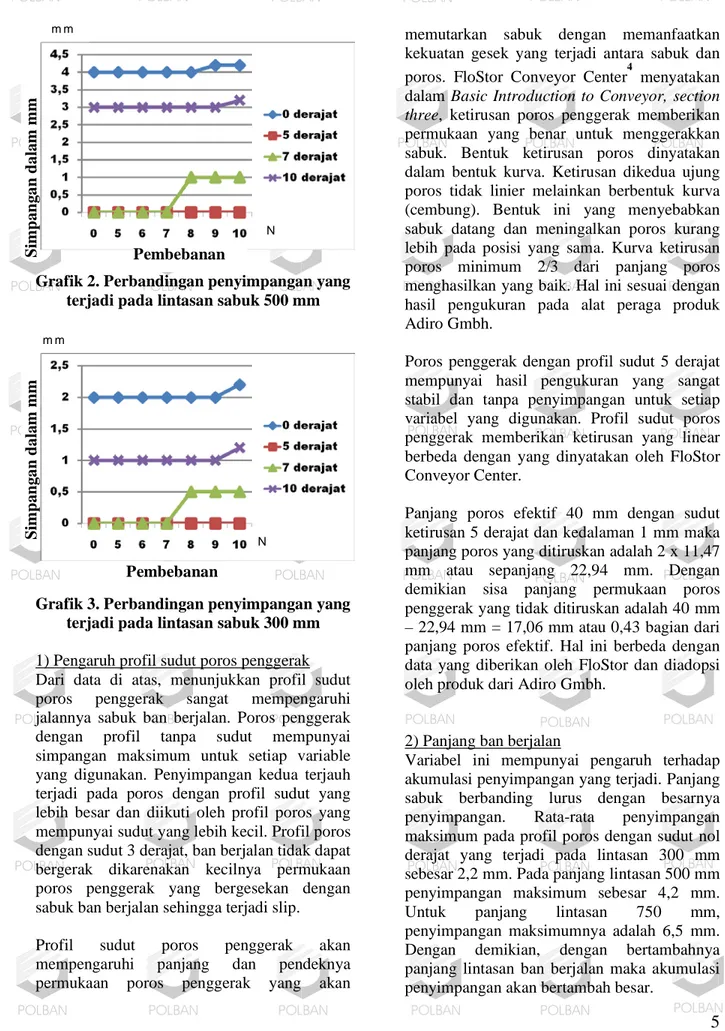
Perbandingan hasil pengukuran ke 4 profil
poros penggerak ditampilkan dalam bentuk
grafik seperti terlihat pada Grafik 1,2 dan 3
Grafik 1. Perbandingan penyimpangan yang terjadi pada lintasan sabuk 750 mm
Si m pa ng a n d a la m mm Pembebanan N mm Batang Penopang Motor Penggerak Poros Penggerak Panjang efektif Milimeter blok
Grafik 2. Perbandingan penyimpangan yang terjadi pada lintasan sabuk 500 mm
Grafik 3. Perbandingan penyimpangan yang terjadi pada lintasan sabuk 300 mm
Profil sudut poros penggerak akan mempengaruhi panjang dan pendeknya permukaan poros penggerak yang akan
memutarkan sabuk dengan memanfaatkan kekuatan gesek yang terjadi antara sabuk dan poros. FloStor Conveyor Center4 menyatakan dalam Basic Introduction to Conveyor, section three, ketirusan poros penggerak memberikan permukaan yang benar untuk menggerakkan sabuk. Bentuk ketirusan poros dinyatakan dalam bentuk kurva. Ketirusan dikedua ujung poros tidak linier melainkan berbentuk kurva (cembung). Bentuk ini yang menyebabkan sabuk datang dan meningalkan poros kurang lebih pada posisi yang sama. Kurva ketirusan poros minimum 2/3 dari panjang poros menghasilkan yang baik. Hal ini sesuai dengan hasil pengukuran pada alat peraga produk Adiro Gmbh.
Poros penggerak dengan profil sudut 5 derajat mempunyai hasil pengukuran yang sangat stabil dan tanpa penyimpangan untuk setiap variabel yang digunakan. Profil sudut poros penggerak memberikan ketirusan yang linear berbeda dengan yang dinyatakan oleh FloStor Conveyor Center.
Panjang poros efektif 40 mm dengan sudut ketirusan 5 derajat dan kedalaman 1 mm maka panjang poros yang ditiruskan adalah 2 x 11,47 mm atau sepanjang 22,94 mm. Dengan demikian sisa panjang permukaan poros penggerak yang tidak ditiruskan adalah 40 mm – 22,94 mm = 17,06 mm atau 0,43 bagian dari panjang poros efektif. Hal ini berbeda dengan data yang diberikan oleh FloStor dan diadopsi oleh produk dari Adiro Gmbh.
1) Pengaruh profil sudut poros penggerak Dari data di atas, menunjukkan profil sudut poros penggerak sangat mempengaruhi jalannya sabuk ban berjalan. Poros penggerak dengan profil tanpa sudut mempunyai simpangan maksimum untuk setiap variable yang digunakan. Penyimpangan kedua terjauh terjadi pada poros dengan profil sudut yang lebih besar dan diikuti oleh profil poros yang mempunyai sudut yang lebih kecil. Profil poros dengan sudut 3 derajat, ban berjalan tidak dapat bergerak dikarenakan kecilnya permukaan poros penggerak yang bergesekan dengan sabuk ban berjalan sehingga terjadi slip.
2) Panjang ban berjalan
Variabel ini mempunyai pengaruh terhadap akumulasi penyimpangan yang terjadi. Panjang sabuk berbanding lurus dengan besarnya penyimpangan. Rata-rata penyimpangan maksimum pada profil poros dengan sudut nol derajat yang terjadi pada lintasan 300 mm sebesar 2,2 mm. Pada panjang lintasan 500 mm penyimpangan maksimum sebesar 4,2 mm. Untuk panjang lintasan 750 mm, penyimpangan maksimumnya adalah 6,5 mm. Dengan demikian, dengan bertambahnya panjang lintasan ban berjalan maka akumulasi penyimpangan akan bertambah besar.
Si m pa ng a n d a la m mm Si m pa ng a n d a la m mm Pembebanan N mm N mm Pembebanan
3) Pengaruh beratnya beban
Pembebanan yang diberikan tidak memperlihatkan efek yang signifikan walaupun terdapat beberapa data yang menyatakan bahwa dengan adanya beban maka penyimpangan menjadi relatif bertambah. Hal ini dapat dilihat, khususnya, pada poros dengan profil sudut nol dan 10 derajat dengan beban mencapai maksimum.
Untuk poros dengan sudut profil 7 derajat, untuk setiap panjang lintasan, gerakan sabuk cenderung lurus sampai pada pembebanan di atas 0,6 kg gerakan sabuk mulai memperlihatkan penyimpangan yang relatif cukup kecil.
Secara umum dapat dikatakan bahwa bagian permukaan poros penggerak yang kontak dengan sabuk ban berjalan merupakan faktor utama untuk menghasilkan pergerakan sabuk yang lebih baik dan stabil. Perlu dikaji lebih lanjut perbedaan permukaan poros penggerak yang berbentuk kurva dan linear dimana permukaan yang linear mempunyai bidang gesek yang lebih panjang (0,43 bagian) dibandingkan dengan permukaan yang linear hanya 33,3 bagian. Dengan demikian gaya untuk menggerakan sabuk yang diberikan oleh permukaan yang linear akan menghasilkan gaya lebih besar dibandingkan dengan poros yang berpermukaan kurva sehingga profil poros tersebut dapat menjadi alternatif untuk penggunaan gaya yang relatif lebih besar. Kesimpulan dan Saran
a) Profil poros penggerak dengan sudut ketirusan 5 derajat dan kedalaman 1 mm memberikan hasil yang stabil untuk setiap variable pengujian.
Kesimpulan
Berdasarkan data dan analisa di atas dapat disimbulkan bahwa:
b) Pada dasarnya luas permukaan kontak antara permukaan poros penggerak dengan sabuk ban berjalan yang akan mempengaruhi kestabilan gerakan sabuk ban berjalan. Didalam penelitian ini diketahui bahwa panjang permukaan poros penggerak yang terbaik untuk mengerakan
sabuk ban berjalan adalah 0,43 bagian dari panjang efektif poros penggerak.
c) Dengan profil ketirusan yang linear, gaya gesek yang ditimbulkan akan lebih besar dibandingkan dengan gaya gesek yang ditimbulkan oleh profil ketirusan kurva sehingga profil poros tersebut akan memberikan gaya pada sistem ban berjalan.
d) Panjang lintasan ban berjalan akan mempengaruhi besarnya simpangan yang terjadi menjadi lebih besar dikarenakan adanya akumulasi simpangan yang berbanding lurus dengan panjang lintasan tersebut.
e)
Pembebanan dalam penelitian ini belum terlihat pengaruhnya secara signifikan meskipun pada kondisi tertentu memperlihatkan pengaruhnya pada besarnya penyimpangan.1. ADIRO Gmbh, ‘ TOM Case System’, Produk Alat Peraga, 2002
Saran-saran
Tentunya penelitian ini dilaksanakan dengan keterbatasan sarana instrumentasi pengukuran khususnya untuk pengukuran gaya dan tegangan yang terjadi pada sabuk ban berjalan. Selama penelitian dilakukan, tegangan sabuk hanya dimonitor dan diatur secara manual sehingga distribusi tegangan yang terjadi pada sabuk belum dapat dikontrol secara optimal. Dengan demikian, untuk penelitian lebih lanjut, Peneliti menyarankan agar tegangan sabuk dapat diukur dengan menggunakan instrument yang layak sebelum melakukan percobaan.
Daftar Pustaka.
2. Rully dan Agus,’ Perbaikan dan Modifikasi Model Sistem Handling dengan
menggunakan Programmable Logic Controllers (PLC)’, Tugas Akhir Teknik Mesin Polban, Bandung, 2006
3. Ronald H Burch,’ Angled Roller Belt Conveyor’, www.FreePatentsonline.com, United States Patent 7111722, 2007
4.
FloStor,’ Basic Introduction to Conveyor’,www.The 20 Principles of Material Handling.mht, website, 2007