BAB II
DASAR TEORI
2.1 Intersymbol Interference (ISI)
Dalam telekomunikasi, gangguan Intersymbol Interference (ISI) merupakan
bentuk distorsi sinyal di mana satu simbol mengganggu simbol berikutnya. Hal ini
dapat terjadi karena pantulan sinyal (refleksi) yang menyebabkan penerimaan
sinyal informasi berulang dengan waktu yang berbeda (delay). Kehadiran ISI
dalam sistem adalah menimbulkan kesalahan dalam perangkat pada keluaran
penerima. Salah satu penyebab gangguan Intersymbol Interference (ISI) adalah
propagasi multipath dimana sinyal nirkabel dari pemancar mencapai penerima
melalui banyak jalur yang berbeda. Ini berarti bahwa sebagian atau seluruh simbol
tertentu akan menyebar ke simbol berikutnya, sehingga mengganggu deteksi yang
benar dari simbol-simbol.
Untuk menghilangkan ISI dapat dilakukan dengan memberikan filter
ekualizer disisi penerima. Selain gangguan yang berupa ISI, gangguan lain yang
biasanya terjadi adalah noise.
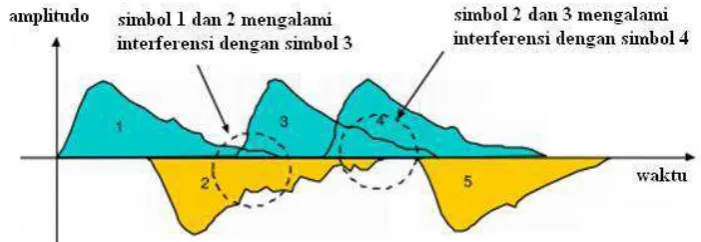
Pada Gambar 2.1 ditunjukkan terjadinya ISI dimana pada Gambar 2.1(a)
menunjukkan ilustrasi data yang dikirimkan dan pada Gambar 2.1(b)
menunjukkan data yang diterima. Terlihat bahwa data yang diterima mengalami
pelebaran energi akibat adanya delay dari saluran transmisi. Keberadaan ISI ini
sangat tidak diperlukan seperti layaknya noise yang dapat mengakibatkan
Gambar 2.1 (a) Data yang dikirim
(b) Data yang diterima
Untuk menghilangkan gangguan tersebut, salah satu caranya adalah dengan
membuat serangkaian filter yang nilai koefisien-koefisiennya harus direncanakan
terlebih dahulu. Dibawah ini ditunjukkan bagaimana pelebaran sinyal seperti
diatas dapat mengakibatkan dampak yang buruk pada sinyal. Gambar 2.2.
menunjukkan sinyal yang dikirimkan mengalami banyak peristiwa pada kanal
yang mengakibatkan sinyal tersebut tercampur dengan noise dan mengalami ISI
sehingga pada saat diterima simbol-simbol melebar dan mengganggu simbol yang
lain[1].
2.2 Pembangkitan Bilangan Acak
Pembangkitan bilangan acak digunakan untuk menghasilkan deretan
angka sebagai hasil perhitungan, yang diketahui distribusinya sehingga
angka-angka tersebut muncul secara acak.
Pembangkitan data masukan pada simulasi ini berdasarkan pada
pembnagkitan bilangan acak berdistribusi Uniform. Distribusi ini memiliki
kepadatan probalilitas yang sama untuk semua besaran yang diambil yang terletak
antara 0 dan 1. Fungsi kepadatan probabilitas dinyatakan dengan persamaan[2]:
𝑓(𝑥) =�
1
𝑏−𝑎 untuk 𝑎 ≤ 𝑥 ≤ 𝑏
0 𝑢𝑛𝑡𝑢𝑘𝑙𝑎𝑖𝑛𝑛𝑦𝑎 (2.1)
Dimana : a dan b = konstanta
Proses pembangkitan distribusi Uniform dilakukan dengan persamaan:
𝑋= 𝑎+ (𝑏 − 𝑎)𝑈𝑛 (2.2)
2.3 Konsep Modulasi Quadrature Ampiltude Modulation (QAM)
Modulasi adalah suatu proses untuk merubah gelombang pembawa (carrier)
sebagai fungsi dari sinyal informasi[3]. Sedangkan demodulasi adalah proses
suatu sinyal modulasi yang dibentuk kembali seperti sinyal aslinya dari suatu
gelombang pembawa (carrier) yang termodulasi oleh rangkaian. Kegunaan dari
modulasi adalah untuk memudahkan radiasi, multiplexing, mengatasi keterbatasan
peralatan, pembagian frekuensi dan mengurangi noise dan interferensi. Sistem
modulasi dibagi menjadi 2 yaitu antara lain :
1. Modulasi Analog
Yaitu teknik modulasi dimana gelombang pembawa (carrier) merupakan
gelombang analog (kontinyu). Meliputi antara lain :
a. Modulasi Amplitudo (AM)
b. Modulasi Frekuensi (FM)
2. Modulasi Digital
Yaitu teknik modulasi dimana gelombang pembawanya (carrier) adalah
merupakan gelombang pulsa, meliputi antara lain :
a. Amplitude-Shift Keying (ASK)
b. Frekuensi-Shift Keying (FSK)
c. Phase-Shift Keying (PSK)
Pada Tugas Akhir ini menggunakan modulasi Quadrature Amplitude
Modulation (QAM). Quadrature Amplitude Modulation (QAM) merupakan salah
satu teknik modulasi digital. Pada QAM, informasi yang akan dikirimkan diubah
menjadi simbol QAM yang dapat direpresentasikan sebagai sinyal analog
pemodulasi. Sinyal pemodulasi ini mengubah amplitudo dan fasa dari sinyal
pembawa. Setiap perubahan fasa dan amplitudo sinyal pembawa
merepresentasikan satu simbol QAM yang terdiri sejumlah bit informasi. Orde
QAM yang sering dinyatakan sebagai M-ary QAM menunjukkan jumlah simbol
QAM yang dapat dihasilkan (M = 2 n ), dengan n adalah jumlah bit penyusun satu
simbol. Bentuk sinyal modulasi QAM dapat ditunjukkan pada Gambar 2.3.
Sedangkan diagram konstelasinya ditunjukkan pada Gambar 2.4 dan 2.5[3].
Gambar 2.4 Diagram konstelasi modulasi 4-QAM dan 8-QAM
Gambar 2.5 Diagram kontelasi modulasi 16-QAM
Orde QAM yang sering digunakan dalam sistem komunikasi adalah orde 16,
64, dan 256. Dengan demikian pada orde 16-QAM dapat terbentuk 16 simbol.
Orde 64-QAM dapat menghasilkan 64 simbol, dan orde 256-QAM dapat
menghasilkan simbol sebanyak 256 simbol.
Pengubah bit ke simbol berfungsi memetakan bit informasi menjadi simbol
QAM. Bit informasi dibagi menurut banyak bit dalam satu simbol dan diubah ke
bentuk berurutan kemudian diurutkan menjadi bit ganjil dan bit genap. Pada
umumnya, keluaran pengubah bit-ke-simbol akan dipetakan ke bentuk kode Gray
(Gray Code) terlebih dulu sebelum dipetakan ke analog. Dengan dipetakan ke
kode Gray, antar simbol terdekat pada diagram konstelasi hanya akan berbeda
satu bit. Hal ini akan membantu mengurangi error di penerima dan untuk
mempermudah dalam desain perangkat keras. Jika misalnya di penerima terjadi
satu kesalahan pembacaan simbol maka hanyaakan ada satu bit yang salah karena
2.4 Filter Digital Finite Impuls Respons (FIR)
Filter adalah sebuah sistem atau jaringan yang secara selektif merubah
karakteristik (bentuk gelombang, frekuensi, fase dan amplitudo) dari sebuah
sinyal. Secara umum tujuan dari pemfilteran adalah untuk meningkatkan kualitas
dari sebuah sinyal sebagai contoh untuk menghilangkan atau mengurangi noise,
mendapatkan informasi yang dibawa oleh sinyal atau untuk memisahkan dua atau
lebih sinyal yang sebelumnya dikombinasikan, sinyal tersebut dikombinasikan
dengan tujuan mengefisiensikan pemakaian saluran komunikasi yang ada.
Filter digital adalah sebuah implementasi algoritma matematik ke dalam
perangkat keras dan/atau perangkat lunak yang beroperasi pada sebuah sinyal
input digital untuk menghasilkan sebuah output sinyal digital agar tujuan
pemfilteran tercapai. Filter digital memainkan peranan yang sangat penting dalam
pemrosesan sinyal digital[4].
Beberapa keuntungan penggunaan filter digital adalah:
1. Filter digital bisa di program (programmable). Operasi yang dilakukan dapat
deprogram yang kemudian dapat disimpan di memori prosesor. Hal ini
menunjukkan filter digital mudah untuk diubah melalui program tanpa
mengubah rangkaian elektroniknya ( hardware).
2. Filter digital lebih mudah didesain, dites dan diimplementasikan.
3. Karakteristik rangkaian filter analog tergantung perubahan temperatur. Filter
digital tidak terpengaruh perubahan temperatur dan sangat stabil.
4. Filter digital mampu bekerja pada sinyal frekuensi rendah dengan akurat.
5. Filter digital serbaguna dalam kemampuannya memproses berbagai sinyal,
seperti filter adaptif yang mampu menyesuaikan terhadap perubahan sinyal.
Dalam kawasan waktu karakteristik filter digital dinyatakan dengan
persamaan:
𝑦(𝑛) =𝑏(1)𝑥(𝑛) +𝑏(2)𝑥(𝑛 −1) +⋯+𝑏(𝑛𝑏+ 1)𝑥(𝑛 − 𝑛𝑏)− 𝑎(2)𝑦(𝑛 −1)− ⋯
Dimana x(n) adalah masukan, y(n) merupakan keluaran dan konstanta b(i) dan
a(i) adalah koefisien filter serta orde maksimal filter dinyatakan oleh na dan nb.
Dengan tranformasi z dalam kawasan frekuensi filter digital dinyatakan
dalam persamaan sebagai berikut:
𝑌
(
𝑧
) =
𝑏(1)+𝑏(2)𝑧−1+⋯+𝑏(𝑛𝑏+1)𝑧−𝑛𝑏1+𝑎(2)𝑧−1+⋯+𝑎(𝑛𝑎+1)𝑧−𝑛𝑎
𝑋
(
𝑧
)
(2.4)
Berbagai macam nama digunakan untuk menggambarkan filter tergantung
dari na dan nb. Jika nb=0 sering disebut dengan IIR (infinite impulse response),
all-pole, recursive atau autoregressive. Jika na=0 filter ini sering disebut
FIR(finite impulse response), all-zero, nonrecursive atau autoregressive moving
average(ARMA).
Finite Impulse Response (FIR) merupakan salah satu filter digital yang
mempunyai unit sample response yang berhingga. Karakteristik dari filter FIR
dapat dilihat pada persamaan berikut:
Filter digital FIR dapat dituliskan dengan persamaan[4]:
𝑦(𝑛) = ∑𝑁−1𝑘=0ℎ(𝑘)𝑥(𝑛 − 𝑘)
(2.5)
𝐻(𝑧) = ∑𝑁−1𝑘=0ℎ(𝑘)𝑧−1
(2.6)
Dimana : k = 0,1,….,N-1 adalah respons impuls atau koefisien dari filter
H(z) adalah fungsi alih dari filter
N adalah panjang dari filter yang merupakan jumlah dari koefisien filter.
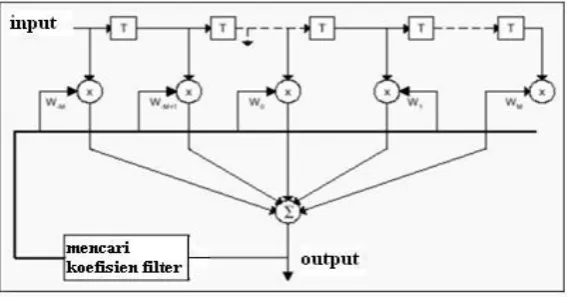
Diagram blok filter digital dapat dilihat pada Gambar 2.6[4].
Berdasarkan diagram blok tersebut secara garis besar filter digital dapat dibagi
menjadi dua yaitu filter digital dengan tanggapan impuls berhingga (FIR) dan
1
Gambar 2.6 Blok Diagram Dari Bentuk Langsung Filter Digital FIR
Persamaan 2.8 adalah persamaan selisih untuk FIR, ini adalah persamaan
dalam domain waktu dan menyatakan filter FIR dalam bentuk tidak rekursif yaitu
output pada suatu saat, y(n) merupakan sebuah fungsi yang hanya bergantung
pada input yang sebelumnya dan input yang sekarang, x(n). Jika filter FIR
dinyatakan dengan persamaan 2.5 maka filter tersebut akan selalu stabil.
Persamaan 2.6 merupakan fungsi alih dari filter, persamaan ini digunakan untuk
maenganalisa tanggapan frekuensi dari filter.
Filter FIR (nonrecursive) sering digunakan pada aplikasi filter adaptif dari
ekualizer adaptif pada sistem komunikasi digital sistem pengontrol noise adaptif.
Adapun kelebihan filter adaptif FIR adalah:
1. Stabilitasnya bisa dikontrol dengan mudah dengan memastikan koefisien
filter terbatas.
2. Lebih mudah dan algoritma yang efisien untuk pengaturan koefisien filter.
3. Kinerja algoritma ini bisa lebih mudah dimengerti pada bagian konvergen
dan stabilitas
Realisasi struktur untuk filter FIR adalah penggambaran fungsi alih filter
ke dalam bentuk blok diagram. Struktur yang sering dipakai adalah struktur
transversal yang diperoleh langsung dari persamaan 2.6 dan digambarkan pada
1
Gambar 2.7 Struktur Tranversal Filter FIR
z-1 melambangkan penundaan sebesar satu satuan waktu pencuplikan. Pada
implementasi ke dalam program kotak dengan label z-1 dapat direalisasikan
dengan shift register atau lokasi memori pada sebuah RAM.
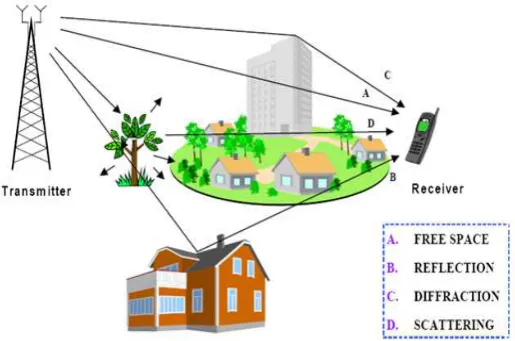
2.5 Fading Rayleigh
Pada sistem komunikasi amplitudo terdapat gangguan khusus berupa
komponen multipath dari sinyal yang dipancarkan. Multipath merupakan jalur
propagasi yang berbeda-beda, yang dilalui sinyal antara pengirim dan penerima,
yang disebabkan karena pantulan oleh halangan-halangan dan benda-benda yang
ada sepanjang propagasi. Lingkungan kanal multipath ditunjukkan pada Gambar
2.8[2].
Perbedaan jalur propagasi menimbulkan komponen multipath dari sinyal
yang dipancarkan tiba pada penerima melalui jalur propagasi yang berbeda dan
pada waktu yang berbeda pula. Perbedaan waktu tiba pada penerima tersebut
menyebabkan sinyal yang diterima mengalami interferensi, yang akan
menimbulkan fenomena fluktuasi amplitudo dan fasa sinyal yang diterima, dan
menimbulkan fenomena mendasar yang disebut fading.
Ada tiga mekanisme dasar yang terjadi pada propagasi sinyal dalam
komunikasi bergerak, yaitu :
1. Refleksi, terjadi ketika gelombang elektromagnet yang merambat
mengenai permukaan halus dengan dimensi besar dibandingkan dengan
panjang gelombang sinyal.
2. Difraksi, terjadi ketika lintasan radio terhalang oleh objek padat yang lebih
besar dari pada panjang gelombang sinyal. Biasa disebut juga dengan
shadowing.
3. Hamburan, terjadi ketika gelombang yang merambat mengenai permukaan
kasar dengan dimensi yang lebih besar dibandingkan dengan panjang
gelombang sinyal atau mengenai permukaan yang berdimensi kecil.
Fluktuasi amplitudo sinyal yang terjadi adalah acak dan tidak dapat
ditentukan sebelumnya, besar dan kapan terjadinya. Namun berdasarkan
penelitian, fading tersebut dapat diperkirakan secara statistik, berupa perubahan
nilai secara acak dengan distribusi tertentu. Salah satu distribusi tersebut
Distribusi Rayleigh. Distribusi Rayleigh merupakan salah satu distribusi yang
dapat menjadi model untuk mewakili fading, sehingga fading memiliki Distribusi
Rayleigh ini disebut Fading Rayleigh.
Pada Fading Rayleigh, setiba sinyal yang melalui jalur yang
berbeda-beda tersebut, memberikan sejumlah energi yang sama terhadap sinyal gabungan
yang ada pada penerima. Sinyal yang dipengaruhi Fading Rayleigh yang sampai
pada penerima dapat dipresentasikan dengan persamaan[2]:
Dimana : r (t) = fluktuasi amplitudo sinyal e(t) sebagai fungsi waktu = |𝑒(𝑡)|
𝜃(𝑡) = fluktuasi fasa sinyal e(t) sebagai fungsi waktu = ∠𝑒(𝑡)
Fluktuasi amplitudo gelombang pembawa pada sinyal yang dipengaruhi Fading
Rayleigh mengikuti Distribusi Rayleigh, dengan persamaan[2].
𝑝
(
𝑟
) =
𝑟 𝜎2𝑒
−�2𝜎2𝑟2�
dengan ( r ≥ 0) (2.8)
Dimana: p(r) = fungsi kepadatan probabilitas munculnya r
r = amplitudo acak
𝜎
2=
varians pdfDistribusi Rayleigh seperti dapat dibangkitkan melalui pembangkitan
distribusi Gamma. Distribusi ini memiliki kepadatan probabilitas sebagai
berikut[2]:
𝑓
(
𝑥
) =
𝛼𝛽𝑥(𝛽−1)𝑒−𝑎𝑥(𝛽−1)!
(2.9)
Dimana : 𝛼 = konstanta positif
𝛽 = konstanta integer positif
Distribusi Gamma ini memiliki mean, 𝜇= 𝛽/𝛼 dan varians, 𝜎2 = 𝛽
𝛼2 = 𝜇/𝛼.
Distribusi Rayleigh merupakan distribusi Gamma dengan 𝛼= 3 dan 𝛽= 3.
Distribusi Gamma dapat dibangkitkan dengan menjumlahkan bilangan acak
eksponensial sebanyak 𝛽, dengan persamaan sebagai berikut[3]:
𝑋=−1𝛼∑𝛽𝑖=1𝑙𝑛𝑈𝑖 (2.10)
Dimana Ui adalah bilangan acak antara 0 dan 1 berdistribusi uniform.
𝑋= − �1
𝛼� 𝑙𝑛 ∏ 𝑈𝑖 𝛽
𝑖=1
(2.11)
2.6 AWGN (Additive White Gaussian Noise)
Salah satu jenis noise yang ada pada sistem komunikasi adalah noise
thermal. Noise thermal ini disebabkan oleh pergerakan-pergerakan elektron di
dalam konduktor yang ada pada sistem telekomunikasi, misalnya pada perangkat
penerima. Pada bidang frekuensi, noise thermal ini memiliki nilai kepadatan
spektrum daya yang sama untuk daerah frekuensi yang lebar, yaitu sebesar N0/2,
seperti yang dapat dilihat pada Gambar 2.9 (a) sedangkan fungsi kepadatan
probabilitas AWGN ditunjukkan pada Gambar 2.9(b)[1].
Prob f(n)
Gambar 2.9 (a) Grafik Kepadatan Spektrum Daya White Noise
(b) Fungsi Kepadatan Probabilitas AWGN
Pergerakan elektron menyebabkan noise thermal bersifat acak, sehingga
besarnya noise thermal juga berubah secara acak terhadap waktu. Perubahan
secara acak tersebut dapat diperkirakan secara statistik, yaitu mengikuti Distribusi
Gaussian, dengan rata-rata nol. Noise ini merusak sinyal dalam bentuk aditif, yaitu
ditambahkan ke sinyal utama, sehingga noise thermal pada perangkat penerima ini
disebut Additive White Gaussian Noise (AWGN). Persamaan Distribusi Gaussian
varians memiliki nilai :
2 adalah kerapatan spectral daya dari noise Tb adalah laju bit.
Sehingga :
AWGN memiliki distribusi Gaussian, yang juga disebut Distribusi Normal.
Distribusi ini memiliki kepadatan probabilitas yang simetris dan berbentuk seperti
lonceng, dan fungsi kepadatan dinyatakan dengan[2]:
𝑓
(
𝑥
) =
1Persamaan di atas merupakan fungsi kerapatan probabilitas untuk distribusi
standar normal. Proses pembangkitan ini mula-mula membangkitkan sebuah
variabel Z dengan persamaan[2]:
𝑍= (−2𝑙𝑛𝑈1)12sin (2𝜋𝑈2) (2.16)
Dimana Ui dan U2 adalah bilangan acak antara 0 sampai 1 yang berdistribusi
Uniform. Nilai distribusi normal, X didapat dari persamaan[2].
2.7 Ekualizer
Ekualizer merupakan alat yang digunakan untuk memperbaiki data yang
rusak akibat distorsi kanal. Ekualizer merupakan filter digital yang dipasang pada
sisi penerima yang bertujuan agar sinyal yang masuk pada sisi penerima tidak lagi
berupa sinyal yang mengalami interferensi. Untuk kanal komunikasi yang
karakteristiknya tidak diketahui filter di penerima tidak dapat didesain secara
langsung. Proses ekualisasi dapat mengurangi efek ISI (IntersymbolInterference),
dan noise untuk demodulasi yang lebih baik[2].
Ada beberapa jenis ekualizer diantaranya :
1. Maximum Likelihood (ML) Sequence Detection, ekualizer jenis ini bekerja
secara optimal namun tidak ada dalam praktik.
2. Linear Equalization, ekualizer jenis ini bekerja tidak begitu optimal
namun sederhana.
3. Non-Linear Equalization, ekualizer jenis ini digunakan untuk beberapa
jenis ISI.
Linear equalization sangat mudah diimplementasikan dan sangat efektif untuk
kanal yang tidak mengandung ISI (seperti kanal dalam kabel telepon) maupun
kanal yang mengandung ISI (seperti kanal wireless). Kebanyakan linear equalizer
diimplementasikan sebagai linear transversal filter. Struktur ekualizer seperti yang
ditunjukkan pada Gambar 2.10[2].
2.8 Algoritma Least Mean Fourth Based Power Of Two Quantizer (LMF-PTQ)
LMF-PTQ adalah salah satu algoritma untuk sistem adaptif yang baru dan
belum banyak digunakan. Sistem adaptif ini adalah sistem yang dirancang untuk
mengatasi gangguan dari berbagai sumber yang berubah-ubah dengan
menyesuaikan terhadap perubahan yang terjadi. Tujuan dari sistem adaptif ini
adalah mencari dan mendapatkan sistem optimum yang dapat diimplementasikan.
Sistem adaptif ini diharapkan akan mampu mengatasi perubahan akibat beragam
gangguan. Sistem adaptif bisa dijadikan pilihan solusi bila karakteristik gangguan
tidak diketahui atau sifat gangguan tersebut berubah-ubah. Sistem ini sering
digunakan atau diidentifikasi sistem, prediksi, menghilangkan interferensi yang
banyak ditemukan dalam telekomunikasi.
Algoritma LMF-PTQ ini diperkenalkan oleh Duttweiler. LMF-PTQ ini
memberikan sebuah pendekatan baru yang secara efektif mengatasi 2 kesulitan
utama yaitu mengoptimalkan di lingkungan non-Gaussian dan mengurangi
perubahan saluran yang mengganggu penggunaan LMF adaptif . Pendekatan baru
ini terinspirasi dari karya yang menunjukkan bahwa LMF, yang pada dasarnya
bergantung pada fungsi biaya non-mean square. Kombinasi dari LMF dan PTQ
pada Tugas Akhir ini juga memberikan derivasi dari pendekatan linier baru dan
sangat berguna dari PTQ input / output karakteristik. Pendekatan linier ini sangat
menyederhanakan analisis kinerja yang diusulkan LMF-PTQ ekualizer.
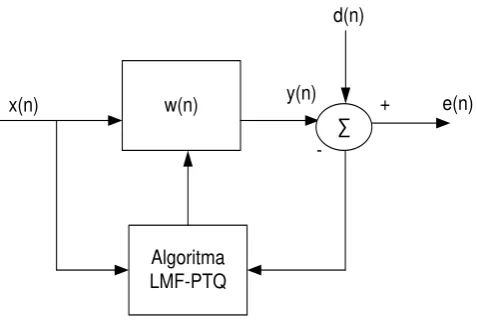
Model saluran linear dengan tap ekualizer ditunjukkan pada Gambar
w(n)
Algoritma LMF-PTQ
∑ e(n)
d(n)
y(n)
-+ x(n)
Gambar 2.11 Adaptive System Equalizer
Input ekualizer dapat ditulis sebagai[6] :
𝑥(𝑛) =�𝑁−1𝑖=0 h(i)a(n−i) + v(n) ( 2.18)
di mana: h (i), i = 0, 1,. . , N-1 adalah impuls kanal tanggapan,
N adalah panjang filter,
(n) menunjukkan data sampel n,
ν (n) adalah aditif noise ditambahkan ke n saluran mewakili panjang
ekualizer.
Output ekualizer diperkirakan y (n), didefinisikan sebagai:
𝑦(𝑛) = 𝑤^T (𝑛)𝑥(𝑛) (2.19)
di mana w (n) = [w (0), w (1), · · ·, w (N - 1)] T adalah nilai bobot adaptif,
superscript T menandakan transpose operasi, dan x (n) = [x (n), x (n - 1), · · ·, x (n
– N +1)] T merupakan vektor masukan. w (n), diperbarui oleh algoritma LMF
menurut:
di mana μ adalah konstanta langkah-ukuran yang mengontrol stabilitas dan tingkat konvergensi dan e (n) adalah kesalahan output sistem contoh pada saat n dan
ditemukan oleh:
𝑑(𝑛) =𝑤𝑇𝑥(𝑛) +𝑧(𝑛) (2.21)
𝑒(𝑛) = 𝑑(𝑛)− 𝑤𝑇(𝑛)𝑥(𝑛) (2.22)
dimana d (n) adalah sinyal yang diinginkan.
z (n) adalah noise dan model error.
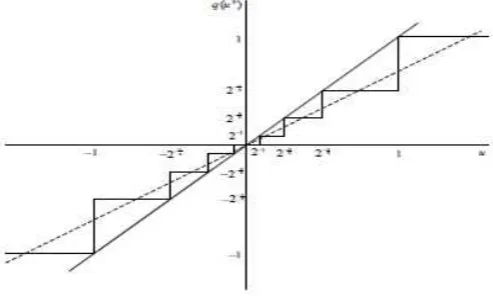
Power of two quantizer ini didefinisikan oleh Duttweiler sebagai:
𝑞(𝑢) = 2[ln|𝑢|]𝑠𝑔𝑛(𝑢) (2.23)
di mana u adalah bilangan bulat terbesar kurang dari u dan sgn (u) adalah tanda u
didefinisikan sebagai:
𝑠𝑔𝑛(𝑢) = �1 𝑢 ≥0 −1 𝑢 < 0
Analisis dari quantizer power-of-dua bit terbatas dimasukkan dengan algoritma
LMS diberikan oleh Xue dan Liu di mana mereka telah menunjukkan bahwa B-bit
power-of-two quantizer mengkonversi sebuah u masukan untuk kata "satu-bit"
menurut:
Penyederhanaan persamaan (2.24) dan diterapkan untuk LMF algoritma dan
mengakibatkan LMF berbasis power-of-two quantizer (LMF-PTQ). Untuk
memperbarui algoritma (2.20), update koefisien equalizer adalah dilakukan sesuai
dengan:
𝑤(𝑛+ 1) = 𝑤(𝑛) + 2𝜇𝑞[𝑒3(𝑛)]𝑠𝑔𝑛[𝑥(𝑛)] (2.25)
𝑞[𝑒3(𝑛)] =�
𝑠𝑔𝑛[𝑒(𝑛)] |𝑒(𝑛)|≥1 2[3 ln|𝑒(𝑛)|]𝑠𝑔𝑛[𝑒(𝑛)] 2−𝐵+13
0 |𝑒(𝑛)| < 2−𝐵+13
≥|𝑒(𝑛)| < 1 (2.26)
Untuk kestabilan ekualizer LMF-PTQ digunakan step size yang dapat diatur
yaitu[6]:
0 <𝜇 < 7𝑁𝛿8
𝑥� 2
𝜋 (2.27)
Dimana 𝛿𝑥 adalah varians.
Perhatikan di sini bahwa (2.26) diperoleh dari persamaan (2.24) dengan
mengganti input u quantizer oleh e3 (n). Akhirnya, Gambar 2.12 menggambarkan
karakteristik transfer dari kuantizer seperti dengan B = 4 bit.
Gambar 2.12 Input-Output karakteristik dari 4-bit power-of-two quantizer.
2.9 Signal To Noise Ratio (SNR)
Signal to Noise Ratio (SNR) adalah perbandingan daya suatu sinyal terhadap
daya noise yang muncul pada titik tertentu dalam transmisi. Biasanya, SNR diukur
pada sebuah penerima, karena nantinya untuk memproses sinyal yang diterima
dan menghilangkan derau yang tidak diinginkan dengan persamaan[7]:
(𝑆𝑁𝑅)𝑑𝐵 = 10𝑙𝑜𝑔10(𝑃𝑠
𝑃𝑛) ( 2.26)
Dimana Ps = power signal (daya sinyal)
Signal to Noise Ratio (SNR) digunakan untuk menentukan batas atas
terhadap jumlah data yang mampu diperoleh dari kanal komunikasi. Shannon
mengemukakan bahwa kapasitas kanal komunikasi maksimum, dalam bit
perdetik, ditentukan dengan persamaan:
𝐶 =𝐵𝑙𝑜𝑔2(1+SNR) (2.27)
Dimana C = kapasitas kanal komunikasi dalam bit perdetik,
B = bandwidth kanal komunikasi dalam Hertz
Persamaan Shannon tersebut menggambarkan nilai maksimum teoritas yang dapat
dicapai oleh system komunikasi. Sedangkan dalam praktiknya, bagaimanapun
juga, jumlah data yang dapat ditransmisikan lebih rendah dari ketentuan Shannon
tersebut. Satu alasan untuk hal ini adalah ketentuan Shannon tersebut berasumsi
hanya pada white noise (derau suhu) saja. Batasan Shannon adalah bahwa
kapasitas kanal komunikasi C tidak boleh lebih kecil dari jumlah informasi yang
akan dikirim.
2.10 Symbol Error Rate (SER)
Untuk mengukur performansi atau unjuk kerja dari sistem yang
direncanakan parameter yang dijadikan acuan adalah Symbol Error Rate (SER).
Symbol Error Rate (SER) adalah pengukuran kualitas dari sinyal yang diterima
untuk sistem komunikasi digital. Hasil pengukuran SER tersebut tidak subjektif
sehingga pengguna data sangat menuntut SER yang kecil. Semakin kecil nilai
SER berarti menunjukkan performansi yang semakin bagus, karena menunjukkan
semakin kecilnya kesalahan simbol data yang diterima. Nilai Symbol Error Rate
(SER) diperoleh dengan membandingkan jumlah kesalahan simbol yang diterima
dengan jumlah simbol yang dikirimkan, mengikuti ketentuan dengan
persamaan[7]:
𝑆𝐸𝑅
=
𝑠𝑡𝑠𝑑
(2.28)
Dimana, st = jumlah kesalahan simbol yang diterima