2. TEORI PENUNJANG
2.1. Basic Dan Karakteristik Lift
Elevator adalah suatu pesawat pengangkat yang mempunyai gerakan periodik untuk menaikan atau menurunkan beban melalui suatu guide rail yang vertikal. Ada beberapa macam jenis elevator dan salah satu pesawat yang termasuk elevator adalah cage elevator yang disebut juga lift. Cage elevator (lift) digunakan untuk vertikal lifting dari material ataupun orang dalam suatu cage (sangkar) yang bergerak sepanjang guide rail vertikal.
2.1.1 Klasifikasi Cage Elevator
Menurut klasifikasi cage elevator dibagi ke dalam 2 jenis, yaitu : - Passanger elevator
- Freight elevator a. Passanger elevator :
Pesawat pengangkat jenis cage elevator ini dipergunakan khusus untuk mengangkut penumpang yang biasanya digunakan di dalam gedung bertingkat.
Karena digunakan untuk mengangkut penumpang, maka lift tipe ini lebih mementingkan kenyamanan penumpang dari pada kecepatan. Oleh sebab itu pada setiap lift tipe ini diperlukan desain interion yang bagus, kenyamanan selama akselerasi tinggi, serta tingkat keamanan yang lebih baik.
b. Freight elevator :
Pesawat pengangkat ini digunakan untuk mengangkut barang, tetapi bisa juga untuk mengangkut orang (biasanya para pekerja). Untuk itu lift tipe ini biasanya lebih mementingkan kecepatan daripada kenyamanan. Oleh karena itu desain interior lift ini tidak perlu terlalu bagus, dan tingkat keamanannya juga kurang karena beban yang diperbolehkan lebih berat untuk lift tipe ini, dengan kondisi spesifikasi yang sama dengan tipe passanger elevator.
2.1.2 Bagian – bagian Pokok Lift Traksi - Sangkar (car)
- Guide rail
- Shaftway (Hoistway)
- Counterweight (beban pengimbang) - Geared machine
- Hoisting machine - Panel kontrol - Peralatan pengaman
2.1.2.1 Sangkar (car)
Sekian banyak komponen yang ada pada lift, maka sangkar merupakan bagian yang terpenting dimana beban ditempatkan.
Syarat – syarat utama daripada sangkar :
- Didesain harus sederhana dan harus seringan mungkin - Sangkar harus tertutup dan aman
- Ventilasi harus cukup
- Sangkar harus kuat dan kokoh
- Luas sangkar harus standar dan tergantung beban yang diberikan - Memiliki safety door
2.1.2.2 Guide rail
Digunakan sebagai jalan daripada sangkar dimana gerakan sangkar yang vertikal, juga untuk menahan sangkar terhadap goncangan ke samping. Umumnya guide rail terbuat dari baja, guide rail diikat dengan sliding clip pada beton dari bangunan.
2.1.2.3 Shaftway (Hoistway)
Shaftway merupakan lorong yang vetikal daripada sangkar atau counterweight yang bergerak vertikal pada saat loading maupun unloading.
Ukuran shaftway biasanya sudah standar dan umumnya tergantung dari macam
beban serta kegunaannya dan tinggi transportasi.
2.1.2.4 Counterwight
Counterweight atau beban pengimbang dalam pesawat lift memegang peranan yang sangat penting karena berfungsi sebagai balance terhadap berat sangkar, maka secara keseluruhan daya yang diperlukan untuk menggerakan pesawat lift bisa ditekan, secara teoritis berat counterweight adalah :
W = G
cage+ 0,5Q (2.1) Dimana : W = berat counterweight
G
cage= berat sangkar kosong
Q = berat penumpang maksimal yang diijinkan
Dalam hal ini untuk mendapatkan jumlah berat counterweight sesuai desain, maka biasanya counterweight dikonstruksikan dari balok – balok besi tuang yang disusun sedemikian rupa pada rangka, sehingga memungkinkan counterweight bergerak sliding sepanjang guide rail.
2.1.2.5 Geared machine
Digunakan sebagai reduksi putaran dari putaran motor hingga putaran guide shave yang mengangkat beban dengan kecepatan yang telah standar.
2.1.2.6 Hoisting machine
Hoisting machine merupakan kombinasi dari motor listrik, guide shave yang berfungsi sebagai pengangkat beban dengan putaran kabel (wire rope).
Hoisting machine merupakan penggerak utama dari lift.
2.1.2.7 Panel kontrol
Panel ini merupakan switch yang bekerja secara otomatis serta sebagai pengaman elektris sehingga gerakan lift bisa bergerak sesuai ketentuan yang dikehendaki. Panel kontrol lift terdiri komponen – komponen listrik dan elektronik yang dirangkai untuk mengatur gerak satu atau beberapa lift.
2.1.2.8 Peralatan pengaman Peralatan ini harus bekerja bila :
- beban overload
- kabel – kabel kendor
- kecepatan sangkar melebihi ketentuan yang standar
Semua peralatan pengaman pada lift (electrical drive) dilengkapi dengan switch yang bisa bekerja dan juga memutuskan hubungan listrik secara langsung.
2.1.2.9 Governor
Fungsi governor adalah membatasi kecepatan sangkar pada batas kecepatan standar, yaitu dengan cara memutus arus pada motor listrik dan pengaman pada safety car.
2.1.2.10 Buffer
Buffer yang terletak pada pit room adalah berfungsi untuk mengurangi hentakan dan memperkecil kerusakan pada saat sangkar landing pada saat posisi paling atas atau bawah.
2.1.2.11 Rem listrik magnetik (electromagnet brake)
Pemasangan rem pada pesawat lift adalah dimaksud untuk memberikan
pengereman pada poros motor penggerak drive shave untuk sangkar akan dan
selama berhenti.
Gambar 2.1. Bagian – bagian pokok lift traksi
Sumber : Adler, Rodney R, Vertical Transportation for Buildings, New York :
American Elsevier Publishing Company, Inc., 1970.
2.1.3 Motor Listrik Penggerak Utama
Motor penggerak (prime mover) untuk pesawat lift bisa dari sumber arus AC atau DC yang dikopel langsung terhadap drive shave (sistem gearless) atau dengan perantaraan transmisi (sistem geared)
2.1.4 Spesifikasi Utama Pemakaian Lift
Dalam suatu bangunan gedung bertingkat yang mempunyai jumlah lantai yang banyak, maka pemasangan instalasi pesawat lift adalah merupakan hal yang sangat penting dan tidak dapat diabaikan, karena hal ini menyangkut kepentingan untuk memindahkan pengunjung dari satu tingkat ke tingkat yang lain secara aman, cepat dan nyaman sehingga akan meringankan beban si pengunjung.
Di bawah ini adalah faktor – faktor yang mendasari pemilihan instalasi pesawat lift dipandang dari sudut pengangkatan :
- Pemindahan penumpang dapat berlangsung secara aman, cepat dan nyaman
- Relatif halus dalam gerakan
- Sangkar (car) dari lift tersebut dapat melayani atau mencapai pemindahan penumpang untuk tingkat atau lantai yang dituju secara singkat.
- Dengan tingkat pengaturan yang tinggi relatif nyaman selama akselerasi Adapun keuntungan penggunaan lift penumpang dibandingkan dengan pesawat transportasi vertikal lainnya (escalator), meliputi hal-hal sebagai berikut :
- Operasinya lebih smooth pada saat pengangkatan maupun pada saat pengereman.
- Lebih cepat sampai pada tempat (lantai) yang diinginkan.
- Lebih aman dikarenakan ruangan tertutup, sehingga dapat meng- hilangkan rasa khawatir bagi si pemakainya.
Selain keuntungan tersebut, penggunaan lift penumpang juga mempunyai kerugian :
- Dapat terkena gangguan, misalnya kemacetan pada panel-panel kontrol.
- Kapasitas angkat lebih kecil dibandingkan dengan freight elevator atau escalator.
- Dibutuhkan tenaga maintenance dan biaya untuk perlengkapan tersebut.
2.1.5 Spesifikasi Teknis Pemakaian Lift
Pedoman pokok yang merupakan dasar dalam hal pesawat pengangkat sebagai alat transportasi vertikal umumnya, serta pesawat lift khususnya adalah sejauh mana karakteristiknya yang ditunjukan variabel-variabelnya yaitu antara lain meliputi :
- Kapasitas
Menurut “Material Handling Equipment”, Rudenko, kapasitas lift penumpang berkisar antara 0,25 – 1,5 ton.
- Kecepatan angkat
Dalam standar kecepatan angkat dari pesawat lift adalah diambil menurut harga kecepatan konstan yang dicapai, dimana dapat dilihat pada tabel 2.1 dan 2.2
Dalam tabel tersebut dapat dilihat bahwa untuk suatu bangunan
bertingkat dengan jumlah tingkat/lantai yang banyak dianjurkan untuk
memilih kecepatan lebih tinggi yang distandar. Selain itu untuk gedung
perkantoran juga memiliki standar kecepatan yang lebih tinggi
dibandingkan dengan apartement, hal ini disebabkan karena karakteristik
orang digedung perkantoran lebih memiliki mobilitas yang tinggi,
sedangkan di apartement biasanya lebih santai dan lebih mementingkan
kenyamanan daripada kecepatan lift.
Tabel 2.1. Standart Kecepatan Lift Penumpang Untuk Gedung Perkantoran
Floors Passenger (fpm) Service (fpm)
2 – 5 250 – 400 200
5 - 10 350 – 500 300
10 - 15 500 – 700 350 - 500
15 - 25 700 – 800 500
25 - 35 800 – 1000 500
35 - 45 1000 – 1200 700 - 800 45 - 60 1200 – 1600 800 - 1000
60 or more 1800 1000
1 fpm (feet per minute) = 0,505 cm/dt
Sumber : Adler, Rodney R, Vertical Transportation for Buildings, New York : American Elsevier Publishing Company, Inc., 1970.
Tabel 2.2. Standart Kecepatan Lift Penumpang Untuk Gedung Apartement
Floors Passenger (fpm) 2 - 3 100 - 200 3 - 5 200 - 350 6 - 8 350 - 500 8 - 12 500 - 700 Over 12
floors 600 or higher
Sumber : Adler, Rodney R, Vertical Transportation for Buildings, New York : American Elsevier Publishing Company, Inc., 1970.
- Stabilitas
Instalasi dari pesawat lift melekat pada induk bangunan gedung yang ditempati sehingga stabilitas frame penyangga (shaft way) pada saat pesawat tersebut bekerja dapat stabil. Sedangkan mengenai getaran yang terjadi pada gerakan sepanjang rail biasanya bergantung pada macam pemilihan design guide rail dan shoes-nya.
2.2. LOGIKA FUZZY
Di tengah-tengah perubahan paradigma ilmu pengetahuan dan
matematika saat ini, terdapat suatu konsep tentang “ketidakpastian”. Setiap
sistem selalu dihadapkan pada suatu keadaan “ketidakpastian”, terlebih lagi untuk sistem yang kompleks dan tidak stabil. Demikian juga dengan pernyataan dengan menggunakan dua kondisi yaitu benar atau salah, karena dalam kenyataannya tidak ada suatu hal yang benar 100% atau salah 100%. Pada tahun 1965, Profesor Lotfi Zadeh dari University of California at Berkeley mengemukakan pendapat bahwa pernyataan “true” dan “false” dari logika Boolean tidak dapat merepresentasikan pernyataan yang tidak pasti yang berada diantara pernyataan
“true” dan “false”, seperti yang terdapat pada banyak hal dalam dunia nyata.
Untuk merepresentasikan ketidakpastian di antara “true” dan “false”, Profesor Lutfi Zadeh mengembangkan suatu teori yang berdasarkan pada teori classical set atau conventional set yang disebutnya sebagai fuzzy set. Tidak seperti logika boolean, logika fuzzy memiliki banyak nilai (multivalue). Sebagai ganti pernyataan dengan nilai seluruhnya “true” atau semuanya “false”, logika fuzzy menggunakan derajat dari membership (degrees of membership) dan derajat dari kebenaran (degrees of truth), sehingga suatu pernyataan dapat sebagian true atau sebagian false dalam waktu bersamaan.
Gambar 2.2. Logika Boolean dan Logika Fuzzy
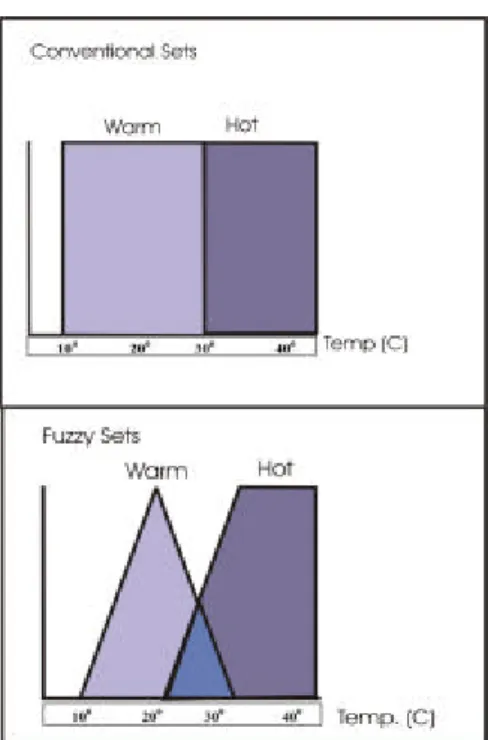
Sebagai contoh, apakah suhu 30
oC termasuk hangat atau panas? Dalam conventional set, suatu elemen merupakan anggota dari satu membership function saja. Misalnya : anggota dari membership function “Hangat” yaitu suhu antara 10
o
C dan 30
oC, sedangkan anggota dari membership function “Panas” yaitu suhu antara 30
oC dan 40
oC. Jadi sangat sulit menentukan apakah suhu 30
oC termasuk hangat atau panas, karena transisi dari hangat ke panas terjadi secara langsung.
Dalam logika fuzzy, suhu 30
oC mungkin termasuk hangat atau panas, hal ini
sesuai dengan keadaan pada dunia nyata bahwa suhu 30
oC termasuk di antara
hangat dan panas. Dengan membership function yang saling tumpang tindih, menyebabkan transisi dari hangat ke panas terjadi secara bertahap.
Gambar 2.3. Conventional Set dan Fuzzy Set
Logika fuzzy tidak hanya mengenali batasan yang jelas dari membership
function sebagai alternatif dari keanggotaan hitam atau putih, tetapi juga gradasi
tanpa batas yang ada diantaranya. Hal ini tampaknya tidak jelas, tetapi logika
fuzzy menguranginya dengan memberikan nilai yang spesifik dari setiap gradasi
tersebut. Untuk lebih memahami sebuah sistem fuzzy, maka harus diketahui
konsep dasar yang berhubungan dengan logika fuzzy. Untuk lebih jelasnya
perhatikan gambar berikut ini.
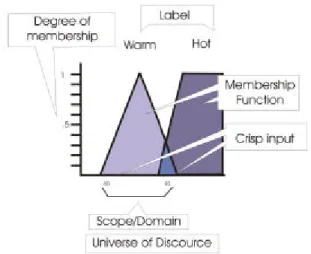
Gambar 2.4. Bagian Membership Function
* Label
Merupakan deskripsi dari nama yang digunakan untuk mengidentifikasi membership function, label-label ini menunjukan suatu keadaan misalnya dingin, sejuk atau hangat.
- Degree of Membership
Menyatakan derajat dari crisp input yang sesuai dengan membership function antara 0 sampai 1. Juga disebut sebagai membership grade, truth value, atau Fuzzy input.
- Crisp Input
Merupakan nilai input dari proses fuzzy yang merupakan besaran suatu kondisi, misalnya 30
o.
- Membership Function
Mendefenisikan fuzzy set dengan memetakan crisp inputs dari nilai domainnya ke dalam derajat keanggotaan (degree of membership).
- Universe of Discourse
Adalah rande dari semua nilai yang mungkin dipakai dalam variabel sistem, merupakan semesta dari himpunan input.
Dalam merancang suatu sistem logika fuzzy berdasarkan aturan (rule- based system), ada lima rangkaian prinsip dan prosedur yang harus dilakukan, yaitu :
a. Menganalisa sistem kontrol secara keseluruhan.
b. Menentukan batasan Input/Output.
c. Menentukan if-then rules.
d. Pengamatan tingkah laku model.
e. Optimasi ke dalam target sistem
2.2.1 Kendali Logika Fuzzy
Tujuan utama dari setiap sistem kendali adalah untuk menghasilkan
output yang sesuai dengan input yang diberikan. Dalam banyak kasus, sistem
kendali konvensional menggunakan pasangan-pasangan input-output berdasarkan
suatu tabel yang disimpan di dalam suatu memori tertentu. Makin banyak input
dan output yang digunakan maka makin banyak memori yang dibutuhkan oleh
sistem kendali. Sehingga proses pengendalian akan semakin tidak efisien dan
lambat prosesnya. Penyelesaiannya dapat dilakukan dengan menggunakan suatu
model persamaan matematika tertentu yang mewakili hubungan input-output
sistem tersebut. Secara teoritis, model persamaan matematika mewakili secara
akurat tingkah laku sistem. Tetapi dalam penerapannya, sangat sulit untuk
melakukan proses perhitungan persamaan matematika untuk sistem yang
kompleks, terutama bila menggunakan mikrokontroler. Selain itu sangat sulit
untuk mendapatkan model persamaan matematika dari suatu sistem yang ingin
dikendalikan. Dengan kendali logika fuzzy, tidak dibutuhkan lagi model
persamaan matematika dari sistem yang ingin dikendalikan. Kendali logika fuzzy
menggunakan pengetahuan kendali dari operator manusia. Kesulitan yang sering
dihadapi dalam merumuskan suatu model matematika dapat disebabkan oleh
sistem yang non linier, variasi waktu dari proses kendali, gangguan-gangguan
yang tidak dapat diperkirakan sebelumnya, keterbatasan sensor atau kesulitan
dalam mendapatkan hasil pengukuranyang presisi. Dalam berbagai masalah ini,
seorang operator manusia tetap dapat melaksanakan tugasnya untuk
mengendalikan suatu proses dengan baik. Kemampuan manusia ini dapat
digunakan sebagai model alternatif yang presisi dalam proses kendali. Cara untuk
menerapkan kemampuan manusia ini adalah dengan menggunakan deskripsi
linguistik yang terdiri dari sekumpulan aturan (If – Then Rules) . Misalnya, JIKA
kecepatan motor menurun perlahan menjauhi nilai yang diinginkan, MAKA
kecepatan motor harus dinaikkan cukup banyak. Bila disederhanakan hasilnya, yaitu : JIKA kecepatan motor adalah NS DAN percepatan motor adalah NS, MAKA output motor adalah PS. Ada dua parameter yang digunakan pada deskripsi di atas, yaitu kecepatan motor dan percepatan motor.
Desain kendali logika fuzzy biasanya dilakukan melalui tiga langkah utama yaitu : proses fuzzifikasi, proses rule evaluation, dan peroses defuzzifikasi.
2.2.1.1 Fuzzification.
Langkah pertama dalam proses kendali logika fuzzy melibatkan transformasi domain yang disebut dengan proses fuzzifikasi (fuzzification).
Tujuan utama dari proses fuzzifikasi adalah mentransformasikan crisp input menjadi fuzzy input. Untuk mentransformasikan crisp input menjadi fuzzy input, yang harus terlebih dahulu dilakukan yaitu menentukan membership function untuk setiap crisp input. Setelah menentukan membership function-nya maka proses fuzzifikasi akan mengambil nilai crisp input dan membandingkan dengan membership function yang telah ada untuk menghasilkan harga fuzzy input.
Crisp Input
Fuzzy Inputs Fuzzification Input
Membership Function
Gambar 2.5. Proses Fuzzifikasi
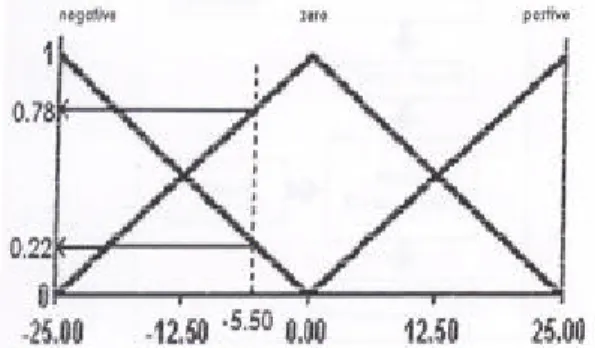
Untuk mendapatkan harga dari fuzzy input, maka dilakukan pemetaan
dari nilai crisp input pada membership function dengan cara seperti di bawah ini :
Gambar 2.6. Membership Function
Tabel 2.3. Crisp Input Fuzzy Input Crisp Input
Negative Zero Positive
-5.50 0.22 0.78 0
Tabel 2.3 memperlihatkan hasil fuzzy input yang didapatkan dari crisp input dan membership seperti yang ditunjukan pada gambar 2.6.
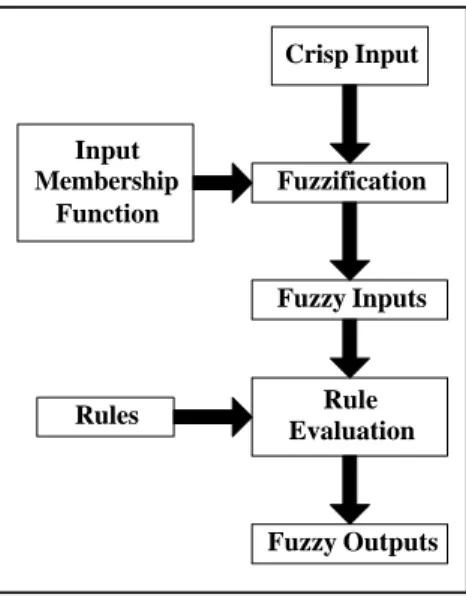
2.2.1.2 Rule evaluation.
Tahap kedua dari proses kendali logika fuzzy adalah rule evaluation,
dengan menggunakan aturan-aturan (rules) yang telah dibuat untuk menentukan
aksi kontrol yang harus dilakukan sesuai dengan nilai input yang dihasilkan (fuzzy
input). Pada tahap ini akan dilakukan evaluasi tiap-tiap rule dengan input yang
dihasilkan dari proses sebelumnya (fuzzification).
Crisp Input
Fuzzy Inputs Fuzzification Input
Membership Function
Rules
Fuzzy Outputs Rule Evaluation
Gambar 2.7. Proses Rule Evaluation
Aturan-aturan fuzzy pada umumnya merupakan statement if-then, yang menggambarkan aksi yang harus dilakukan sebagai respon dari berbagai macam fuzzy input. Statement yang dipakai memiliki bentuk seperti contoh berikut :
JIKA kecepatan motor adalah NS (antecedent1) DAN percepatan motor adalah NS (antecedent2), MAKA output kecepatan motor adalah PS (conssequent1).
Perlu diperhatikan bahwa pada antecedent menyatakan variabel input = label tertentu dari membership function yang terdapat pada variabel input tersebut. Dari contoh di atas pada antecedent1 variabel input-nya adalah kecepatan motor, dan label yang dipakai adalah NS (Negative Small). Pada antecedent2 variabel input- nya adalah percepatan motor dan label yang dipakai adalah NS (Negative Small).
Sedangkan consequent1 menyatakan variabel output = label tertentu dari membership function dari variabel output. Langkah selanjutnya dari rule evaluation adalah mengevaluasi fuzzy input yang didapat dari proses fuzzifikasi untuk tiap antecedent dari rule dan menentukan rule strength dari tiap-tiap rule.
Karena antecendent dihubungkan dengan operator ‘dan’ (AND) maka rule strength diambilkan dari strength value yang terkecil dari antecedent.
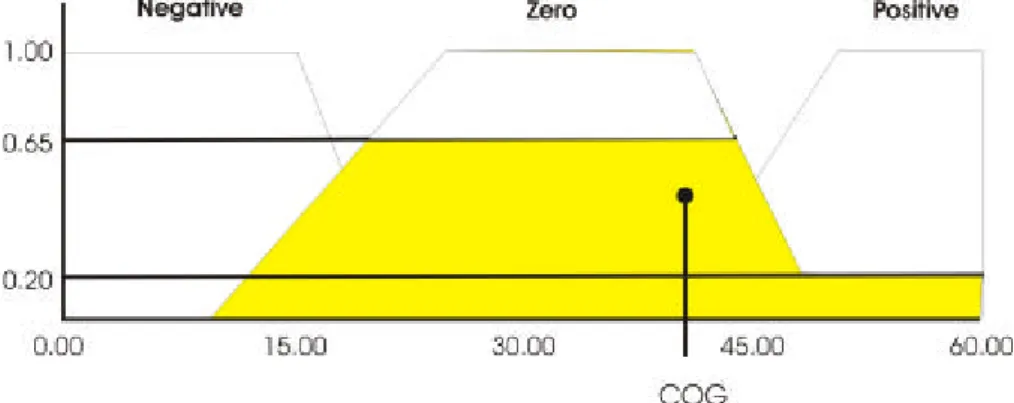
Proses selanjutnya adalah menentukan fuzzy output dengan cara
membandingkan dan mengambil rule strength terbesar dari semua rule yang
mempunyai label consequent yang sama.
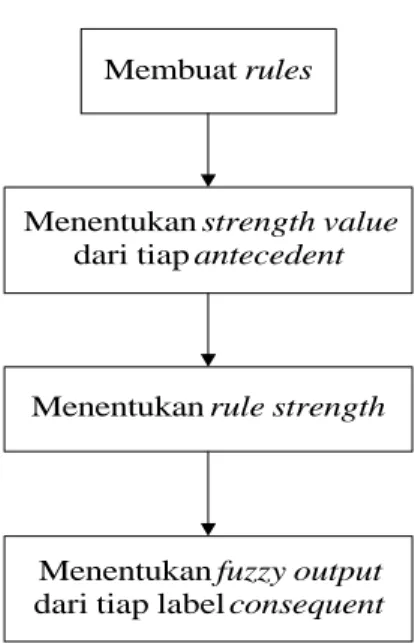
Secara ringkas, proses yang terjadi pada tahap rule evaluation ini dapat digambarkan melalui blok diagram di bawah ini :
Membuat rules
Menentukan fuzzy output dari tiap label consequent Menentukan strength value
dari tiap antecedent
Menentukan rule strength