MIKROKONTROLLER ATMEGA328
SKRIPSI
SUBHAN FAHMI NASUTION 170821030
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2019
MIKROKONTROLLER ATMEGA328
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
SUBHAN FAHMI NASUTION 170821030
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2019
PEMBUATAN ALAT UJI KESTABILAN POWER UNIT DC 380V TERHADAP BEBAN BERVARIASI BERBASIS
MIKROKONTROLLER ATMEGA328
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2019
SUBHAN FAHMI NASUTION 170821030
i
MIKROKONTROLLER ATMEGA328
ABSTRAK
Telah dirancang dan dibuat sebuah alat Uji Kestabilan Power Unit DC 380V Terhadap Beban Bervariasi Berbasis Mikrokontroller Atmega328. Dengan semakin pentingnya peranan tenaga listrik dalam kehidupan sehari-hari, khususnya bagi keperluan Industri, maka mutu tenaga listrik juga menjadi tuntutan yang makin besar dari pihak pemakai tenaga listrik. Suatu sistem tenaga listrik dapat dinyatakan bekerja dengan baik jika sistem tersebut mampu melayani beban secara kontinu dan konstan terhadap tegangannya. Agar dapat bekerja dengan baik, maka sistem tenaga listrik harus memiliki kemampuan untuk menjaga kestabilannya. Kestabilan tegangan merupakan salah satu hal yang penting dalam operasi sistem tenaga listrik Karena dengan menguji kestabilan tegangan untuk menghindarkan kerusakan pada peralatan-peralatan listrik. Power Unit merupakan suatu perangkat penting dalam dunia elektronika. Power Unit umumnya digunakan untuk mensuplai perangkat elektronik yang membutuhkan arus atau tegangan DC. Sehingga dengan perkembangan teknologi yang membutuhkan tegangan DC, power unit juga mengalami perkembangan untuk meningkat kinerjanya
Kata Kunci: Kestabilan, Mikrontroller, ATMega328 dan Power Unit DC
MICROCONTROLLER ATMEGA 328
ABSTRACT
It has been designed and created a dc unit power stability test tool against variation load based Microcontroller Atmega 328. With the growing importance of the role of electric power in everyday life, particularly for Industrial purposes, then the quality of electric power also became a growing demand on the part of electric power wearers. An electric power systems can be declared working well if the system is capable of serving a constant continuous load to its voltage. In order to work well, then the electrical power system must have the ability to maintain stability. Tension stability is one of the important things in the operation of electric power systems because by testing voltage stability to avoid damage to electrical equipment. Power Unit is an important device in the world of electronics. Power Units are generally used to supply electronic devices requiring DC current or voltage. So that with technological developments that require DC voltage, the power unit also undergoes development to improve its performance.
Keywords: Stability, Microcontroller, ATMega 328 and Power Unit DC
Alhamdulillah, puji syukur penulis ucapkan kepada Allah SWT karena atas limpahan rahmat dan karunia-Nya sehingga Skripsi ini dapat terselesaikan.
Tak lupa pula penulis mengirimkan salam dan shalawat kepada Nabi Besar Muhammad SAW yang telah membawa umatnya dari alam kegelapan ke alam yang berilmu pengetahuan seperti saat sekarang ini.
Dalam kesempatan ini penulis menyampaikan rasa ucapan terima kasih yang sebesar-besarnya kepada, Mamaku sayang, Hamnah Baroroh, guru pertamaku dan ibu yang sangat luar biasa. Salah satu yang membuatku bersyukur di dunia adalah terlahir dari rahim sucimu. Doa-doa Mama lah yang membuatku dapat mengerti arti kehidupan. Semoga Allah memberi kesehatan dan kebahagiaan kepada Mama. Maaf belum bisa menjadi anak yang sebaik yang mama inginkan. Ayahku tersayang, Damhuri S.Sos Pahlawan yang luar biasa yang selalu memompaku untuk maju dan mengalahkan rasa takutku dan yang tak henti-hentinya memberikan dukungan, doa, nasehat, dan motivasi hingga sampai detik ini penulis tetap kuat dan bersemangat dalam menyelesaikan studi.
Terimakasih Mama dan Ayah atas kasih sayang dan kepercayaan yang telah kalian berikan kepada anak kalian ini, serta abangku Zulfadli Adha Nasution, S.P dan adikku tersayang Niswah Mursyida, doa dan motivasi yang diberikan dari awal mulai perkuliahan sampai penulisan Skripsi ini serta buat seluruh keluarga yang telah membantu, mendukung dan memberikan kelonggaran serta dukungan terhadap pendidikan saya hingga bisa berkembang seperti sekarang.
Serta orang-orang yang mendukung sehingga penulis dapat menyelesaikan Skripsi ini. Pada kesempatan ini penulis mengucapkan terima kasih banyak kepada :
1. Yth.Bapak Dekan Dr. Kerista Sebayang, MS beserta jajarannya di lingkungan FMIPA USU
2. Bapak Dr. Perdinan Sinuhaji, MS, sebagai ketua Departemen Fisika FMIPA USU selaku dosen penguji saya. Penulis sangat berterima kasih untuk setiap masukan, saran bahkan waktu yang senantiasa diberikan kepada penulis
yang senantiasa diberikan kepada penulis sampai pada akhir penyelesaian Skripsi ini.
4. Bapak Drs. Kurnia Brahmana, M.Si selaku dosen pembimbing saya. Penulis sangat berterima kasih untuk setiap masukan, saran bahkan waktu yang senantiasa diberikan kepada penulis sampai pada akhir penyelesaian Skripsi ini.
5. Seluruh Dosen dan Karyawan Program Studi S-1 Fisika Departemen Fisika FMIPA-USU.
6. Kepada ENGINEERING’S SQUAD yang beranggotakan Dimas, Alfath, Alfransisko, Rahmi, Yon, Safira, Mual, Andy, dan Reinhard atas dukungan doa dan harapan sehingga penulis menyelesaikan Skripsi dengan baik meskipun banyak tantangan yang di hadapi.
7. Kepada Fauzi dan Ismail teman susah senang yang selalu membantu, memberi saran, motivasi untuk Penulis agar mampu menyelesaikan Skripsi ini.
8. Kepada teman-teman seperjuangan di S-1 Fisika Eks. 2017 atas dorongan dan kesabaran kalian untuk menghadapi teman seperti saya ini.
Tak ada gading yang tak retak tak ada sesuatu yang sempurna, begitu juga dengan Tugas Akhir saya ini. Penulis menyadari bahwa Tugas Akhir ini belum sempurna. Untuk itu, penulis mengharapkan kritik dan saran yang bersifat konstruktif guna perbaikan di masa mendatang. Dan berharap ini bermanfaat dan dapat menambah wawasan kita.
“Sesungguhnya sesudah kesulitan itu ada kemudahan.” (Qs.Al-Insyirah: 6) Medan, Juli 2019 Penulis,
Subhan Fahmi Nasution
Halaman
PENGESAHAN SKRIPSI i
ABSTRAK ii
ABSTRACT iii
PENGHARGAAN iv
DAFTAR ISI vi
DAFTAR TABEL viii
DAFTAR GAMBAR ix
DAFTAR LAMPIRAN x
BAB 1 PENDAHULUAN 1
1.1. Latar belakang 1
1.2. Rumusan Masalah 2
1.3. Batasan Masalah 3
1.4. Tujuan Penelitian 3
1.5. Manfaat Penelitian 3
1.6. Sistematika Penulisan 4
BAB 2 TINJAUAN PUSTAKA 5
2.1. Stabilitas Tegangan 5
2.2 Power Unit DC 7
2.2.1 Klasifikasi Umum Power Supply 8
2.2.2 Jenis-jenis Power Supply 10
2.3 Tegangan DC 11
2.4 Tegangan 380 V DC 14
2.5 Beban 18
2.6 Umpan Balik (Feedback) 20
2.7 Mikrokontroller 22
2.8 Mikrokontroller ATMega 328 27
2.8.1 Komunikasi Serial Mikrokontroller 32
2.8.2 Pin Masukan dan Keluaran 34
2.8.3 Sumber Daya dan Pin Tegangan 35
2.8.4 Arduino IDE 35
BAB 3 PERANCANGAN DAN PEMBUATAN SISTEM 37
3.1. Jenis Penelitian 37
3.4 Rangkaian Mikrokontroller ATMega 328 38 3.5 Rangkaian Sistematika Minimum Sistem 39 3.6 Perancangan dan penggunaan Modul DAC 40
3.7 Rangkaian LCD 42
3.8 Rangkaian Keseluruhan 42
3.9 Prosedur Penelitian 44
3.10 Diagram Alir (Flowchart) 45
BAB 4 HASIL DAN PEMBAHASAN 46
4.1 Pengujian Rangkaian Mikrokontroller ATmega 328 46
4.2 Pengujian Rangkaian LCD 48
4.3 Pengujian Alat Uji Kestabilan Power Unit DC 50
BAB V KESIMPULAN DAN SARAN 53
5.1. Kesimpulan 53
5.2. Saran 53
DAFTAR PUSTAKA LAMPIRAN
Nomor. Judul Halaman Tabel
2.1 Perbandingan Parameter Jaringan Listrik DC 15 Sebagai Input untuk Standarisasi
2.2 Perbandingan Efisiensi Lima Sistem 16
Distribusi pada Beban 50%
2.3 Sistem Distribusi DC Global 17
4.1 Pengujian Pin Mikrokontroller ATMega 328 47
4.2 Pengujian Pin Display LCD 48
4.3 Data Hasil Pengujian Power Unit DC 50
Nomor Judul Halaman Gambar
2.1 Gelombang Sinyal DC dan AC 8
2.2 Segitiga Daya 12
2.3. Rangkaian Pembagi Tegangan 14
2.4 Arsitektur Distribusi Daya 380V DC 15
2.5 Umpan Balik (Feedback) Sistem 21
2.6 Blok Diagram Mikrokontroller 22
2.7 Chip Mikrokontroller 23
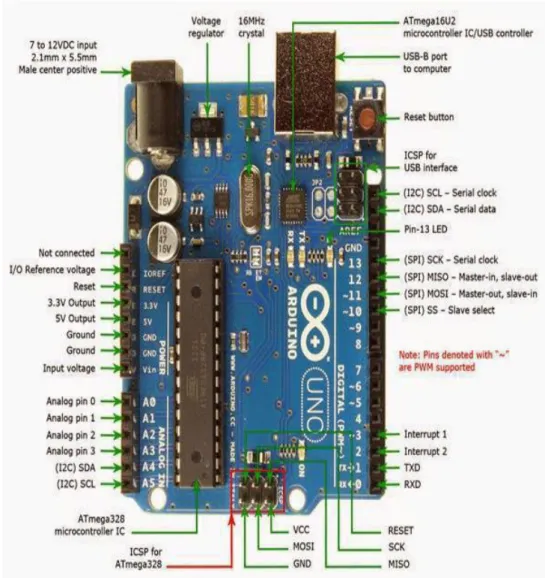
2.8 Konfigurasi Arduino Uno 27
2.9 Pin Mikrokontroller ATMega 328 29
2.10 Papan Arduino Uno 31
2.11 Logo Arduino 36
2.12 Arduino IDE 36
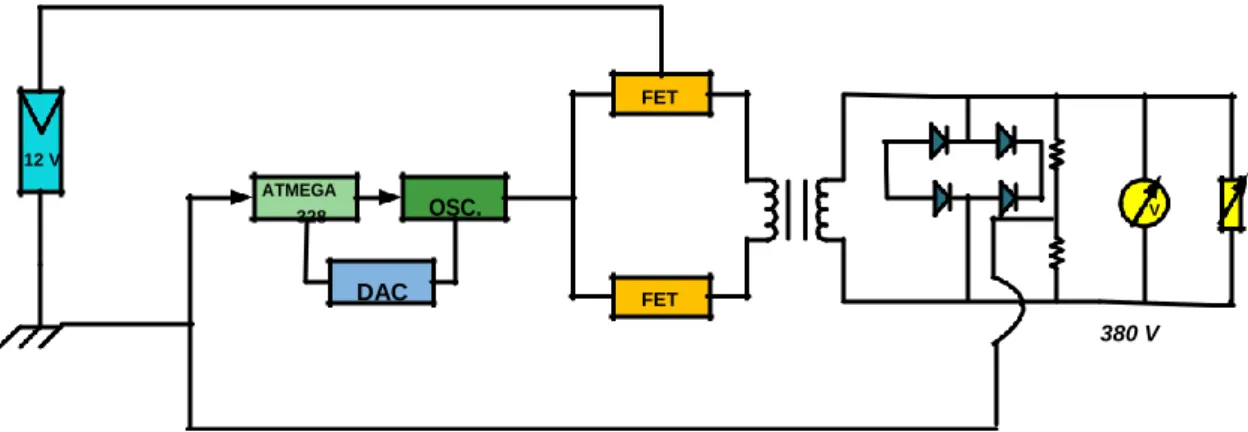
3.1 Blok Diagram 37
3.2 Perancangan Mikrokontroller 38
3.3 Rangkaian Skematik Minimum Sistem 40
3.4 Rangkaian Skematik DC Controller 40
3.5 Perancangan Modul DAC 0808 41
3.6 Rangkaian Skematik LCD terhubung ke Arduino 42
3.7 Skema Rangkaian Keseluruhan 43
3.8 Diagram Prosedur Penelitian 44
3.9 Diagram Alir (Flowchart) 45
4.1 Pengujian Mikrokontroller 46
4.2 Grafik Hubungan Battery (Watt) dengan DC to DC 51 (Watt) Terhadap Beban Bervariasi
Lampiran 1. Rangkaian PCB Layout Lampiran 2. Rangkaian Skematik Alat Lampiran 3. Program Lengkap
Lampiran 4. Foto Keseluruhan Alat Lampiran 5. Datasheet
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Perkembangan ilmu pengetahuan dan teknologi telah membawa banyak manfaat dan kemudahan bagi kehidupan manusia. Salah satu manfaat yang sangat menonjol adalah dalam bidang elektronika, khususnya penggunaan mikrokontroler sebagai pengendali otomatis dan pengolah proses. Dengan mikrokontroler maka penggunaan peralatan yang dulu hanya bisa dikendalikan secara manual sekarang bisa dikendalikan dengan menggunakan satu IC yang berukuran kecil.[1]
Power Unit merupakan suatu perangkat penting dalam dunia elektronika.
Power Unit umumnya digunakan untuk mensuplai perangkat elektronik yang membutuhkan arus atau tegangan DC. Sehingga dengan perkembangan teknologi yang membutuhkan tegangan DC, power unit juga mengalami perkembangan untuk meningkat kinerjanya.[2]
Dengan semakin pentingnya peranan tenaga listrik dalam kehidupan sehari- hari, khususnya bagi keperluan Industri, maka mutu tenaga listrik juga menjadi tuntutan yang makin besar dari pihak pemakai tenaga listrik. Suatu sistem tenaga listrik dapat dinyatakan bekerja dengan baik jika sistem tersebut mampu melayani beban secara kontinu dan konstan terhadap tegangan. Agar dapat bekerja dengan baik, maka sistem tenaga listrik harus memiliki kemampuan untuk menjaga kestabilannya.[3]
Kestabilan tegangan merupakan salah satu hal yang penting dalam operasi sistem tenaga listrik. Gangguan-gangguan yang terjadi pada operasi sistem tenaga dapat menyebabkan ketidakstabilan tegangan listrik. Selain itu, dampak ketidakstabilan tegangan juga dapat membuat kerusakan pada peralatan–peralatan penyaluran energi listrik dan peralatan-peralatan yang menggunakan energi listrik.
Dari berbagai peralatan elektronik yang ada saat ini, hampir semuanya memerlukan Power Unit sebagai sumber tegangan DC untuk dapat bekerja dengan baik. Power Unit yang baik harus memiliki output yang stabil, tahan terhadap noise, dan juga memiliki sistem pengaman untuk mengantisipasi short circuit.
Power Unit juga dapat digunakan sebagai perangkat yang memasok energi listrik untuk satu atau lebih beban listrik. Untuk menggunakan power unit, kita harus menyesuaikan tegangan keluarannya dengan tegangan yang dibutuhkan oleh beban.[4]
Salah satu teknologi yang populer adalah mikrokontroler yang sering disematkan di peralatan canggih sebagai penggendali kerja. Mikrokontroler adalah sebuah sistem komputer terfungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output. Mikrokontroler adalah salah satu dari bagian dasar dari sistem komputer.[5]
Mikrokontroller Arduino board ialah modul yang menggunakan mikrokontroler ATmega 328 dan menggunakan seri yang lebih canggih, sehingga dapat digunakan untuk membangun sistem elektronika berukuran minimalis namun handal dan cepat.[6]
Dari hal tersebut penulis ingin merancang sebuah perangkat yang dapat menguji kestabilan Power Unit DC 380V terhadap beban bervariasi dengan menggunakan mikrokontroller ATMega 328. Karena dengan menguji kestabilan tegangan untuk menghindarkan kerusakan pada peralatan-peralatan listrik.
1.2 Rumusan Masalah
Adapun rumusan masalah pada penelitian ini adalah sebagai berikut.
1. Sumber daya listrik pada tegangan 380V DC dapat berasal dari berbagai sumber, sehingga power unit yang dibuat harus diuji dulu kesetabillannya sebelum digabung.
2. Sumber daya 380V DC yang tidak stabil atau drop pada saat-saat tertentu akan mengakibatkan terputusnya daya listrik kepada pemakai.
3. Sumber daya listrik 380V DC yang tidak stabil harus dapat memutuskan sendiri konversinya secara otomatis untuk menghindari kerusakan pada baterai.
1.3 Batasan Masalah
Mengacu pada hal diatas, penulis membuat perancangan alat Uji Kestabilan Power Unit DC 380V terhadap Beban Bervariasi Berbasis Mikrokontroller Atmega328. Pembatasan masalah dalam penelitian ini hanya mencakup beberapa point utama, diantaranya adalah:
1. Rangkaian pengendalian kestabilan dilakukan dengan mengambil umpan balik dari tegangan ouput dan diumpankan ke mikrokontroller atmega328, untuk kemudian mengubah nilai frekuensi dan pwm untuk mengembalikan tegangan output konstan pada 380V DC
2. Rangkaian umpan balik menggunakan optocopler dan pengirimanan nilai frekwensi dan pwm melalui DAC menuju osilator.
3. Rangkaian Mikrokontroller yang digunakan adalah mikrokontroller ATMega328.
1.4 Tujuan Penulisan
Adapun tujuan dari penelitian ini adalah sebagai berikut.
1. Menghasilkan satu unit power supply 380V DC yang stabil
2. Kestabilan power unit yang dikendalikan menggunakan mikrokontroller ATMega328 dan DAC
1.5 Manfaat Penulisan
Adapun manfaat dari penelitian ini adalah sebagai berikut.
1. Power unit yang sudah stabil dapat menghentikan sendiri proses konversi dc ke dc secara otomatis jika pada saat digabung dengan power unit lain mengalami kegagalan.
2. Power unit ini dapat digunakan secara langsung pada inverter dc to ac pure sine.
1.6 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman, penulis membuat sistematika penulisan bagaimana sebenarnya prinsip kerja dari alat uji kestabilan power unit dc 380v terhadap beban bervariasi, maka penulis menulis skripsi dengan urutan sistematika laporan ini sebagai berikut :
BAB I PENDAHULUAN
Bab ini berisikan mengenai latar belakang, rumusan masalah, batasan masalah, tujuan penulisan, manfaat penulisan, serta sistematika penulisan.
BAB II LANDASAN TEORI
Bab ini meliputi tentang teori landasan teori, dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian teori pendukung itu antara lain tentang mikrokontroler yang digunakan, bahasa program yang dipergunakan dan komponen pendukung.
BAB III PERANCANGAN DAN PEMBUATAN SISTEM
Membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
BAB IV PENGUJIAN DAN HASIL RANGKAIAN
Pembahasan rangkaian dan program yang dijalankan serta pengujian rangkaian, uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat dan lain sebagainya.
BAB V KESIMPULAN DAN SARAN
Bab ini berisikan penutup yang meliputi tentang kesimpulan dari pembahasan yang dilakukan dari laporan skripsi ini serta saran apakah rangkaian ini dapat dibuat lebih efisien dan dikembangkan dengan metode lain yang mempunyai sistem kerja yang sama.
BAB 2
TINJAUAN PUSTAKA
2.1 Stabilitas Tegangan
Kestabilan sistem tenaga listrik adalah kemampuan dari suatu sistem dalam menjaga operasi yang seimbang dan kemampuan sistem tersebut kembali pada kondisi operasi normal ketika terjadi gangguan. Kestabilan sistem tenaga menunjukkan kemampuan sebuah sistem tenaga listrik, pada kondisi operasi awal yang diberikan, untuk mengembalikan kondisi operasi menjadi seimbang kembali setelah mendapatkan gangguan fisik pada hampir keseluruhan variabel sistem yang saling terikat sehingga integritas sistem dapat tidak terjaga.[7]
Salah satu faktor pada kestabilan sistem tenaga adalah stabilitas tegangan.
Stabilitas tegangan ialah kemampuan dari sistem untuk menjaga nilai tegangan pada batas yang ditentukan baik sebelum, selama dan setelah terjadi gangguan. Sistem mengalami kondisi tidak stabil ketika terjadi gangguan dan perubahan beban.
Stabilitas tegangan merupakan bagian penting dalam operasi suatu sistem tenaga listrik. Ketidakstabilan tegangan merupakan ketidakmampuan sistem untuk mempertahankan profil tegangan dalam batas yang diperbolehkan setelah terjadi gangguan atau perubahan konfigurasi sistem. Setiap sistem tenaga listrik diharapkan dapat mempertahankan stabilitas tegangannya untuk menjaga ketersediaan suplai listrik secara kontinu dengan kualitas daya yang baik dan meminimalisasi terjadinya pemadaman listrik total atau sebagian.[8]
Stabilitas tegangan terbagi menjadi dua, yaitu stabilitas tegangan akibat gangguan yang kecil dan akibat gangguan yang besar. Stabilitas tegangan akibat gangguan kecil ini terjadi akibat gangguan yang kecil atau bersifat lokal, seperti perubahan kenaikan beban di sistem. Sedangkan, stabilitas akibat gangguan besar adalah kemampuan sistem untuk mempertahankan tegangan pada batas operasi yang ditentukan akibat terjadi gangguan yang besifat besar, seperti kesalahan sistem, pelepasan generator, atau kontingensi pada jaringan. Keadaan tersebut membuat sistem harus mendapatkan kembali kestabilannya.[3]
Kestabilan tegangan berkaitan dengan kemampuan suatu sistem daya untuk menjaga tegangan tetap stabil pada semua sistem, pada kondisi operasi normal dan setelah terjadi gangguan. Ketidakstabilan yang terjadi akan mengakibatkan tegangan turun atau tegangan naik. Akibat yang mungkin timbul dari ketidakstabilan tegangan adalah hilangnya beban dimana tegangan mencapai nilai rendah yang tidak dapat diterima atau hilangnya integritas sistem daya.
Masalah kestabilan tegangan biasanya terjadi pada sistem dengan pembebanan yang besar. Ketidakstabilan tegangan dapat menginisiasi terjadinya runtuh tegangan. Gangguan yang menyebabkan runtuh tegangan dapat dipicu oleh beberapa hal, seperti naiknya beban atau gangguan besar yang muncul secara tiba- tiba. Stabilitas tegangan merupakan permasalahan utama pada transmisi daya listrik terutama melalui saluran yang panjang dengan tingkat pembebanan yang tinggi.
Ketidakstabilan tegangan terjadi karena kecenderungan beban menyerap daya lebih besar dari batas pembebanan sistem. Tingkat stabilitas tegangan perlu terus dipantau untuk mencegah sistem tenaga listrik mengalami ketidakstabilan atau runtuh tegangan. Indikator akan membandingkan tingkat pembebanan dengan batas stabilitas tegangan.[8]
Analisis stabilitas tegangan diperlukan saat perencanaan ataupun operasi sistem tenaga listrik. Apabila terdapat perubahan konfigurasi sistem yang tidak disengaja seperti terjadinya kontingensi, tentunya kemungkinan besar stabilitas tegangan sistem tidak akan sama dengan kondisi normal. Contohnya adalah lepasnya saluran atau generator dapat mengakibatkan turunnya kemampuan stabilitas tegangan. Terdapat berbagai metode untuk menganalisis stabilitas tegangan, salah satunya yaitu titik ketidakstabilan tegangan dapat ditentukan dengan menggunakan Fast Voltage Stability Index (FVSI). FVSI merupakan indeks stabilitas tegangan yang mengacu pada saluran sistem. Stabilitas tegangan juga dapat dilihat dengan metode lain seperti kurva P-V yaitu hubungan antara perubahan daya dan tegangan.
Terdapat dua jenis stabilitas tegangan berdasarkan waktu simulasinya:
stabilitas tegangan statis dan stabilitas tegangan dinamis. Analisis dinamis digunakan untuk studi stabilitas transien dengan memperhatikan dinamika beban dan generator.
Analisis statis menggunakan persamaan aljabar yang secara komputasional lebih mudah dibanding analisis dinamis.[9]
2.2 Power Unit DC
Power Supply atau dalam bahasa Indonesia disebut dengan Catu Daya adalah suatu alat listrik yang dapat menyediakan energi listrik untuk perangkat listrik ataupun elektronika lainnya. Pada dasarnya Power Supply atau Catu daya ini memerlukan sumber energi listrik yang kemudian mengubahnya menjadi energi listrik yang dibutuhkan oleh perangkat elektronika lainnya. Oleh karena itu, Power Supply kadang-kadang disebut juga dengan istilah Electric Power Converter.
Power Unit atau Catu daya DC merupakan suatu rangkaian elektronik yang mengubah arus listrik bolak-balik menjadi arus listrik searah. Catu daya menjadi bagian yang penting dalam dunia elektronika yang berfungsi sebagai sumber tenaga listrik. Catu daya juga dapat digunakan sebagai perangkat yang memasok energi listrik untuk satu atau lebih beban listrik.
Catu daya merupakan bagian terpenting dalam elektronika yang memiliki fungsi sebagai sumber tenaga listrik. Secara umum prinsip rangkaian catu daya terdiri atas komponen utama yaitu transformator, dioda dan kondensator. Dalam pembuatan rangkaian catu daya, selain menggunakan komponen utama juga diperlukan komponen pendukung agar rangkaian tersebut dapat berfungsi dengan baik.
Komponen Pendukung tersebut antara lain : sakelar, sekring, jack dan plug, Printed Circuit Board (PCB) dan kabel. Baik komponen utama maupun komponen pendukung sama-sama berperan penting dalam rangkaian catu daya.
Untuk menggunakan catu daya, kita harus menyesuaikan tegangan keluarannya dengan tegangan yang dibutuhkan oleh beban. Umumnya catu daya yang dijual dipasaran menghasilkan keluaran tegangan yang tidak stabil dan pengubahan nilai tegangan keluaran tidak dapat dilakukan dengan mudah, sehingga dibutuhkan sebuah catu daya yang bisa diprogram secara digital, tegangan keluaran yang dihasilkan dapat sesuai dengan tegangan masukan yang diinginkan, dan ditampilkan ke tampilan LCD (Display).
Catu daya adalah sebuah perangkat yang memasok listrik energi untuk satu atau lebih beban listrik. Pada dasarnya ctu daya ini mempunyai konstruksi rangkaian yang hampir sama yaitu terdiri dari trafo, penyearah, dan penghalus tegangan. Istilah ini paling sering diterapkan ke perangkat yang mengubah satu bentuk energi listrik
yang lain, meskipun juga dapat merujuk ke perangkat yang mengkonversi bentuk energi lain (misalnya, mekanik, kimia, solar) menjadi energi listrik.
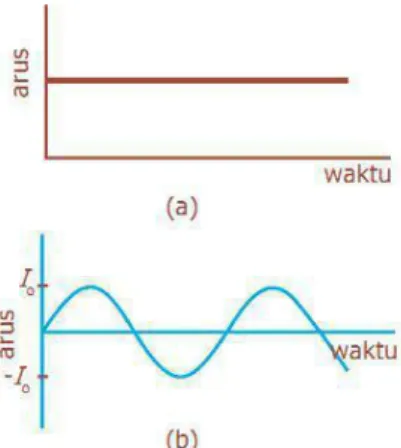
Gambar 2.1 Gelombang Sinyal DC dan AC
Pada gambar 2.1 menunjukkan perbedaan antara tegangan (a) DC dan (b) AC. Sumber DC yang disearahkan dari sumber AC dengan menggunakan rangkaian penyearah yang dibentuk dari dioda. Ada dua sumber catu daya yaitu sumber AC dan sumber DC. Sumber AC yaitu sumber tegangan bolak– balik, sedangkan sumber tegangan DC merupakan sumber tegangan searah.
Ada dua macam catu daya, yaitu catu daya tegangan tetap dan catu daya variable. Catu daya tegangan tetap adalah catu daya yang tegangan keluarannya tetap dan tidak bisa diatur, sedangkan catu daya variable merupakan catu daya yang tegangan keluarannya dapat diubah atau diatur. Catu daya yang baik selalu dilengkapi dengan regulator tegangan, adapun tujuan pemasangan regulator tegangan pada catu daya adalah untuk menstabilkan tegangan keluaran apabila terjadi perubahan tegangan masukan pada catu daya. Fungsi lain dari regulator tegangan adalah untuk perlindungan dari terjadinya hubung singkat pada beban.
2.2.1 Klasifikasi Umum Power Supply
Pada umumnya Power Supply dapat diklasifikasikan menjadi 3 kelompok besar, yakni berdasarkan Fungsinya, berdasarkan Bentuk Mekanikalnya dan juga berdasarkan Metode Konversinya. Berikut ini merupakan penjelasan singkat
1. Power Supply Berdasarkan Fungsi (Functional)
Berdasarkan fungsinya, Power supply dapat dibedakan menjadi Regulated Power Supply, Unregulated Power Supply dan Adjustable Power Supply.
a. Regulated Power Supply adalah Power Supply yang dapat menjaga kestabilan tegangan dan arus listrik meskipun terdapat perubahaan atau variasi pada beban atau sumber listrik (Tegangan dan Arus Input).
b. Unregulated Power Supply adalah Power Supply tegangan ataupun arus listriknya dapat berubah ketika beban berubah atau sumber listriknya mengalami perubahan.
c. Adjustable Power Supply adalah Power Supply yang tegangan atau Arusnya dapat diatur sesuai kebutuhan dengan menggunakan Knob Mekanik. Terdapat 2 jenis Adjustable Power Supply yaitu Regulated Adjustable Power Supply dan Unregulated Adjustable Power Supply.
2. Power Supply Berdasarkan Bentuknya
Untuk peralatan Elektronika seperti Televisi, Monitor Komputer, Komputer Desktop maupun DVD Player, Power Supply biasanya ditempatkan di dalam atau menyatu ke dalam perangkat-perangkat tersebut sehingga kita sebagai konsumen tidak dapat melihatnya secara langsung. Jadi hanya sebuah kabel listrik yang dapat kita lihat dari luar.
Power Supply ini disebut dengan Power Supply Internal (Built in).
Namun ada juga Power Supply yang berdiri sendiri (stand alone) dan berada diluar perangkat elektronika yang kita gunakan seperti Charger Handphone dan Adaptor Laptop. Ada juga Power Supply stand alone yang bentuknya besar dan dapat disetel tegangannya sesuai dengan kebutuhan kita.
3. Power Supply Berdasarkan Metode Konversinya
Berdasarkan Metode Konversinya, Power supply dapat dibedakan menjadi Power Supply Linier yang mengkonversi tegangan listrik secara langsung dari Inputnya dan Power Supply Switching yang harus mengkonversi tegangan input ke pulsa AC atau DC terlebih dahulu.
2.2.2 Jenis-jenis Power Supply
Selain pengklasifikasian diatas, Power Supply juga dapat dibedakan menjadi beberapa jenis, diantaranya adalah DC Power Supply, AC Power Supply, Switch Mode Power Supply, Programmable Power Supply, Uninterruptible Power Supply, High Voltage Power Supply. Berikut ini adalah penjelasan singkat mengenai jenis- jenis Power Supply.
1. DC Power Supply
DC Power Supply adalah pencatu daya yang menyediakan tegangan maupun arus listrik dalam bentuk DC (Direct Current) dan memiliki Polaritas yang tetap yaitu Positif dan Negatif untuk bebannya. Terdapat 2 jenis DC Supply yaitu :
a. AC to DC Power Supply
AC to DC Power Supply, yaitu DC Power Supply yang mengubah sumber tegangan listrik AC menjadi tegangan DC yang dibutuhkan oleh peralatan Elektronika. AC to DC Power Supply pada umumnya memiliki sebuah Transformator yang menurunkan tegangan, Dioda sebagai Penyearah dan Kapasitor sebagai Penyaring (Filter).
b. Linear Regulator
Linear Regulator berfungsi untuk mengubah tegangan DC yang berfluktuasi menjadi konstan (stabil) dan biasanya menurunkan tegangan DC Input.
2. AC Power Supply
AC Power Supply adalah Power Supply yang mengubah suatu taraf tegangan AC ke taraf tegangan lainnya. Contohnya AC Power Supply yang menurunkan tegangan AC 220V ke 110V untuk peralatan yang membutuhkan tegangan 110VAC. Atau sebaliknya dari tegangan AC 110V ke 220V.
3. Switch-Mode Power Supply
Switch-Mode Power Supply (SMPS) adalah jenis Power Supply yang langsung menyearahkan (rectify) dan menyaring (filter) tegangan Input AC untuk mendapatkan tegangan DC. Tegangan DC tersebut kemudian di-switch ON dan OFF pada frekuensi tinggi dengan sirkuit frekuensi
tinggi sehingga menghasilkan arus AC yang dapat melewati Transformator Frekuensi Tinggi.
4. Programmable Power Supply
Programmable Power Supply adalah jenis power supply yang pengoperasiannya dapat dikendalikan oleh Remote Control melalui antarmuka (interface) Input Analog maupun digital seperti RS232 dan GPIB.
5. Uninterruptible Power Supply (UPS)
Uninterruptible Power Supply atau sering disebut dengan UPS adalah Power Supply yang memiliki 2 sumber listrik yaitu arus listrik yang langsung berasal dari tegangan input AC dan Baterai yang terdapat didalamnya. Saat listrik normal, tegangan Input akan secara simultan mengisi Baterai dan menyediakan arus listrik untuk beban (peralatan listrik). Tetapi jika terjadi kegagalan pada sumber tegangan AC seperti matinya listrik, maka Baterai akan mengambil alih untuk menyediakan Tegangan untuk peralatan listrik/elektronika yang bersangkutan.
6. High Voltage Power Supply
High Voltage Power Supply adalah power supply yang dapat menghasilkan Tegangan tinggi hingga ratusan bahkan ribuan volt. High Voltage Power Supply biasanya digunakan pada mesin X-ray ataupun alat-alat yang memerlukan tegangan tinggi.
2.3 Tegangan DC
Tegangan searah atau dc banyak dipergunakan di dalam industri, bukan hanya sebagai sumber daya listrik motor dc, tetapi juga banyak untuk aplikasi yang lain. Biasanya tegangan dc ini didapat dari tegangan ac yang disearahkan dengan komponen semikonduktor seperti dioda, thyristor, mosfet dll. Tegangan dc ini tidak hanya harus tersaring dengan bersih tetapi juga teregulasi dengan baik. Kalau sumber arus searah ini dibebani maka tegangan outputnya akan berubah. Perubahan ini disebabkan oleh jatuhnya tegangan di diode, saluran, transformator atau di generator kalau sumbernya langsung dari generator.
Perubahan ini juga disebabkan oleh perubahan tegangan sumber. Perubahan ini tentunya tidak diinginkan, karena akan mengurangi unjuk kerja dari peralatan yang kita pasang. Maka diperlukannya suatu pengendalian tegangan dc, sehingga peralatan yang kita pasang bekerja sesuai dengan kemampuannya. Berdasarkan ide yang membutuhkan tegangan konstan maka dibuatlah suatu alat yang bisa menjaga tegangan konstan. Tegangan DC keluaran dari konverter harus dinaikkan terlebih dahulu untuk meningkatkan efisiensi dan meningkatkan rasio konversi.[10]
Penyaluran tenaga listrik dengan tegangan DC lebih jarang diterapkan daripada penyaluran tenaga listrik dengan tegangan AC. Namun demikian, penyaluran tenaga listrik dengan tegangan DC memiliki sejumlah keuntungan dibandingkan dengan tegangan AC. Keuntungan-keuntungan tersebut diantaranya:
1. Dengan tegangan puncak dan rugi daya yang sama, kapasitas penyaluran dengan sistem DC lebih besar daripada dengan sistem AC.
2. Isolasi sistem DC lebih sederhana daripada sistem AC.
3. Efisiensi (daya yang terpakai) lebih besar karena faktor daya pada sistem DC
= 1, sedangkan faktor daya pada sistem AC belum tentu 1, biasanya kurang dari 1 yang menyebabkaan tidak semua daya total menjadi daya aktif.
Gambar 2.2 menjelaskan tentang faktor daya .
Gambar 2.2 Segitiga Daya
Nilai faktor daya seperti yang digambarkan oleh segitiga daya pada Gambar 2.2 adalah:
(2.1)
Pada sistem DC, karena tidak ada daya reaktif (Q), sudut faktor dayanya bernilai 0. Dengan demikian nilai faktor dayanya adalah: cos 0 0 = 1 atau P/ S= 1 atau total daya yang dihasilkan (daya semu) menjadi daya aktif.
Sedangkan pada sistem AC, cos φ dapat bernilai kurang dari 1 diakibatkan terdapatnya daya reaktif (Q) yang salah satunya dapat ditimbulkan oleh beban yang bersifat induktif (lagging). Misalnya sudut faktor daya 37o, maka : Cos 37o=0,8 =P/S Karena P/S< 1 , maka tidak seluruh daya yang dihasilkan (daya semu) menjadi daya aktif. Terdapat daya reaktif yang dihasilkan yaitu sebesar: Q = S . Sin 37= 0.6 S.
4. Tidak ada persoalan frekuensi pada penyaluran jarak jauh menggunakan sistem DC.
5. Penerapan sistem DC dapat mengurangi fluktuasi tegangan pada beban-beban pengguna sehingga tegangan yang disuplai ke beban pengguna hampir dapat dijaga konstan.
6. Dengan rugi korona yang sama dan tingkat gangguan radio (radio interference) tertentu, tegangan DC dapat dinaikkan lebih tinggi daripada tegangan AC.
7. Lebih rendah biaya saluran udara (overhead line) atau biaya saluran kabel bawah tanah (underground) atau biaya kabel bawah laut (submarine) serta tidak memerlukan kapasitor seri atau shunt.
Karena adanya keuntungan-keuntungan pada penyaluran dengan tegangan DC, maka penggunaan sistem DC mulai diminati kembali pada tahun 1930-an.
Selain memiliki keuntungan, sistem distribusi DC juga memiliki kekurangan.
Kekurangan tersebut diantaranya:
1. Konversi tegangan dari satu level DC ke level DC lain lebih sulit daripada konversi AC-AC.
2. Untuk sistem DC tegangan sangat rendah, besar jatuh tegangan meningkat sehingga memberikan peningkatan rugi daya.
3. Lebih sulit memutuskan (interruption) arus DC disebabkan tidak adanya pemotongan di titik nol (zero-crossing) pada gelombang DC.
4. Karena tidak adanya tegangan induktansi diri, batasan arus hubung singkat pada rangkaian DC lebih sulit ditentukan daripada rangkaian AC.[11]
Chopper DC dapat digunakan sebagai regulator mode pensaklaran untuk mengubah tegangan DC, yang biasanya tidak teregulasi, menjadi tegangan keluaran DC yang teregulasi. Regulasi tidak biasa dicapai melalui pulse-width modulation
pada frekuensi tetap dan devais pensaklaran biasanya memiliki BJT, MOSFET, atau IGBT. [12]
Gambar 2.3 Rangkaian Pembagi Tegangan
Pada gambar 2.3 dijelaskan bahwa komponen tegangan adalah sensor tegangan yang berfungsi untuk menentukan tegangan jala-jala listrik setiap saat. Hal ini diperlukan untuk mengukur tegangan setiap saat. Sensor tegangan ini berupa pembagi tegangan. Tegangan yang dihasilkan masih berupa sinyal sinusoidal.
Tegangan ini akan diteruskan ke input rangkaian penyearah.
2.4 Tegangan 380 V DC
European Telecommunications Standards Institute (ETSI) dan EMerge Alliance telah membakukan 380 Vdc dan membuat panduan untuk distribusi listrik DC. Dalam sistem listrik dc, UPS digunakan untuk mengubah listrik dari ac ke dc.
Karena distribusi ke pusat data menggunakan dc, bypass sistem UPS juga akan membutuhkan rectifier. Akibatnya, sistem dc lebih hemat biaya dalam sistem. Hal yang perlu diperhatikan ketika merancang sistem distribusi listrik dc adalah menggunakan perangkat perlindungan yang tepat, dan mengikuti syarat spesisik untuk sistem grounding dc (merujuk ke IEEE Standard 1100-2005 – IEEE Recommended Practice for Powering and Grounding Electronic Equipment).
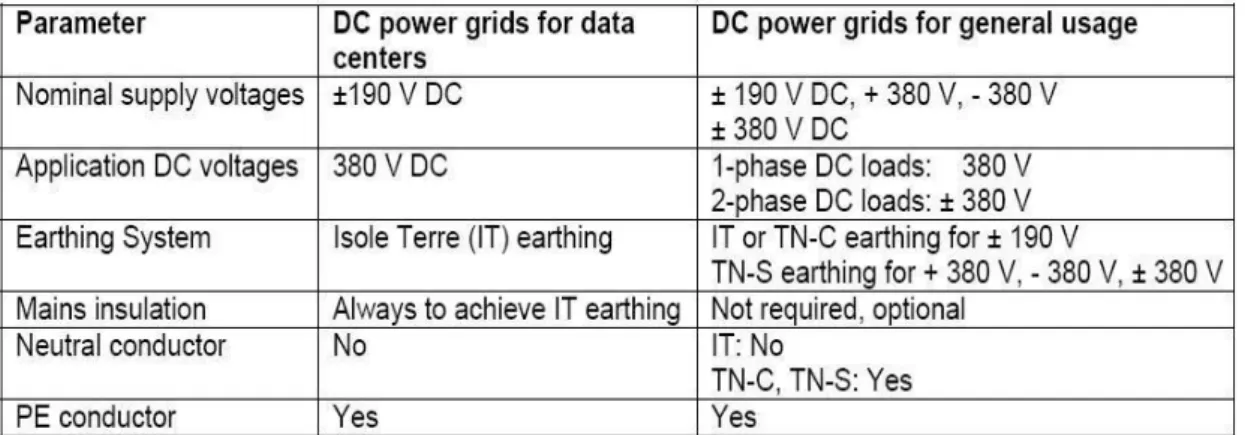
Dalam usaha untuk meningkatkan efisiensi energi dan menghemat biaya, berbagai strategi distribusi listrik ke pusat data mulai marak digunakan. Peningkatan efisiensi dicapai dengan menggunakan sistem distribusi DC dibandingkan dengan distribusi AC sistem dapat dikaitkan dengan berbagai alasan. Alasan utama untuk efisiensi sistem DC yang lebih tinggi adalah itu membutuhkan jumlah tahap konversi daya yang lebih rendah. Standarisasi jaringan DC akan menjadi kunci untuk menggabungkan produk dari beberapa produsen yang dikenal dari jaringan listrik AC.
Tabel 2.1 : Perbandingan Parameter Jaringan Listrik DC sebagai Input untuk Standarisasi
Standardisasi DC 380V di pusat data cukup baru. Sejumlah besar perusahaan seperti EMerge Alliance dan APC bekerja untuk menyediakan produk mematuhi standar 380V DC untuk aplikasi pusat data. Distribusi DC tingkat fasilitas (di sini distribusi 380V DC) menyediakan lebih tinggi efisiensi sebagai inverter (konverter DC-AC) di UPS, konverter AC-DC di PSU, dan transformator di PDU yang di dapat terbatas.[12][13]
Gambar 2.4 Arsitektur distribusi daya 380V DC
Unit catu daya (PSU) mengubah AC pasokan ke DC yang diatur bertegangan rendah daya untuk komponen internal server atau media penyimpanan digital. DC PSU miliki efisiensi energi lebih tinggi daripada PSU AC karena memiliki tahap konversi yang lebih sedikit. Juga, DC PSU jauh lebih andal dan memiliki
ketersediaan lebih tinggi dari AC PSU karena jumlahnya lebih sedikit komponen dalam jalur pengiriman daya.
PSU DC akan memiliki efisiensi yang lebih tinggi dan keandalan yang lebih baik daripada AC PSU karena lebih sedikit jumlah konverter secara seri. Arsitektur distribusi daya 380V DC telah diusulkan untuk diperoleh peningkatan efisiensi dan keandalan yang lebih tinggi dalam kekuatan pusat data.[14]
Berbagai penelitian telah dilakukan untuk memvalidasi peningkatan efisiensi dalam distribusi DC sistem. Laboratorium Nasional Lawrence Berkley (LBNL) mulai menyelidiki distribusi DC efisiensi di pusat data pada tahun 2004.
Hasil yang diperoleh dalam penelitian mereka menyatakan bahwa distribusi DC mengkonsumsi daya 28% lebih sedikit dibandingkan dengan distribusi AC pada pusat data. Investigasi yang dilakukan menyimpulkan bahwa pada beban 50%, sistem 380 Vdc adalah yang paling efisien di antara sistem yang dipertimbangkan sebelumnya. Hasil penelitian ini ditunjukkan pada Tabel 2.2 adalah sebagai berikut.
Tabel 2.2 Perbandingan Efisiensi lima Sistem Distribusi pada beban 50 %
Dari tabel 2.2 diperoleh satu-satunya implementasi distribusi DC yang ada, hingga dekade terakhir, adalah telekomunikasi dan pusat data yang beroperasi pada 48 Vdc. Inisiatif penelitian pada bangunan teknologi tinggi seperti telekomunikasi dan pusat data dimulai pada awal 2000-an sebagai akibat dari isu energi di California. LBNL dimulai melihat efisiensi distribusi daya di pusat data pada tahun 2004. Sistem distribusi 380 Vdc didirikan untuk demonstrasi di Newark, CA.
Kemudian, dalam laporannya tahun 2008, ia melaporkan peningkatan dalam efisiensi 28% dan 7% masing-masing, dibandingkan dengan 208 Vac dan 408 sistem Vac di pusat data.
Pada 2009, fasilitas baru dengan distribusi DC sudah diimplementasikan dan dipelajari secara global, dengan level tegangan bervariasi antara 220 Vdc hingga 550 Vdc. Pada akhir 2014, ada lebih banyak fasilitas menerapkan distribusi DC pada level tegangan 380 Vdc. Sebuah sistem distribusi terintegrasi dengan sumber DC (misalnya, sel bahan bakar, panel surya, dll) dianggap, sistem distribusi DC lebih efisien daripada sistem AC.
Tabel 2.3 Sistem Distribusi DC Global.
Dari tabel 2.4 telah diamati bahwa industri telekomunikasi dan pusat data konvergen pada 380 Vdc sebagai level tegangan cocok untuk distribusi DC.
Meningkatnya jumlah lokasi percontohan dan pengguna awal menunjukkan minat yang semakin besar pada Distribusi 380 Vdc. Banyak badan standar industri seperti Standar Telekomunikasi Eropa Institut (ETSI), Aliansi Untuk Solusi Industri
Telekomunikasi (ATIS), Internasional Telecommunications Union (ITU), eMerge Alliance, Komisi Elektroteknik Internasional (IEC), Underwriters Laboratories (UL), dan banyak lainnya telah merilis standar dan dan banyak lainnya telah merilis standar dan saat ini mengerjakan lebih banyak dalam distribusi 380 Vdc. Saat ini, penelitian lebih lanjut sedang dilakukan pada standardisasi Distribusi 380 Vdc. Banyak perusahaan telah merilis produk yang kompatibel dengan 380/400 Vdc distribusi ke pasar global. Semakin banyak perusahaan menunjukkan minat pada 380 vdc dan mengumumkan produk untuk masa depan.
Industri telekomunikasi dan transportasi telah menggunakan listrik DC selama bertahun-tahun. Sumber energi alternatif dan terbarukan seperti tenaga surya, tenaga angin, dan sel bahan bakar merupakan sumber listrik berbasis DC. Sebagian besar perangkat listrik di hunian dan perkantoran beroperasi secara internal menggunakan listrik DC. Dan, yang paling penting, perangkat penyimpanan energi seperti baterai dan sistem UPS juga menggunakan DC.[13]
Strategi distribusi listrik 380 V DC mengantarkan listrik DC dari IPS (In Plane Switching) dc rectifier langsung ke power supply. Tujuan utamanya adalah meraih efisiensi dengan meniadakan inverter losses di UPS, rectifier losses di power supply, dan losses trafo yang berkaitan dengan PDU (Power Distibution Units).
2.5 Beban
Terdapat beberapa jenis beban terkait dengan penggunaannya antara lain : beban rumah tangga, beban industri, dan beban perkantoran. Dari beban-beban tersebut, terdapat beban yang dapat beroperasi dengan AC maupun DC. Beban tersebut antara lain
a. Beban resistif yang meliputi lampu pijar, kompor listrik, oven listrik, dan sebagainya. Beban-beban resistif ini merupakan beban yang dimodelkan sebagai resistansi.
b. Beban elektronika yang meliputi komputer, TV layar datar, battery charger . Beban ini secara internal menggunakan DC dimana terdapat penyearah jembatan (bridge rectifier) yang mengkonversi dari AC menjadi DC. Selain itu, saat ini terdapat lampu fluorescent atau compact fluorescent lamp (CFL) yang dapat beroperasi dengan DC, yaitu yang menggunakan ballast
elektronika. Pada CFL sendiri terdapat dua teknik umum agar lampu ini dapat menyala, yaitu :
a. Ballast Magnetik
Ballast Magnetik merupakan teknik awal pada sistem lampu fluorescent. Meskipun inti besi dari ballast sederhana, tetapi ballast ini ukurannya besar dan mempunyai rugi-rugi yang tinggi.
b. Ballast Elektronika
Ballast Elektronika merupakan teknologi terbaru yang membawa kepada efisiensi yang lebih baik pada sistem lampu fluorescent.
Ballast elektronika memanfaatkan elektronika daya untuk membangkitkan tegangan frekuensi tinggi pada lampu.
c. Beban berputar yang digerakkan dengan universal machine atau frequency controlled machine. Beban seperti pengering rambut (hair dryers), vacuum cleaner, pengaduk makanan (food mixers) biasanya menggunakan motor universal. Motor universal ini sebagian besar merupakan motor DC yang dapat beroperasi baik dengan tegangan AC maupun DC .
Selain itu, terdapat beban yang hanya dapat beroperasi dengan menggunakan suplai AC yaitu beban yang mengandung bagian induktif. Hal ini disebabkan suplai DC menghasilkan arus konstan yang melalui bagian induktif dari beban tersebut.
Beban dengan breaker mekanis yang didesain untuk tegangan AC juga tidak bisa disuplai dengan DC.
Regulasi beban menentukan nilai seberapa besar perubahan tegangan yang terjadi pada keluaran pada rentang tertentu akibat dari perubahan nilai arus beban, pada umumnya pengujian dimulai dari arus minimum (tanpa beban, NL) sampai ke tingkat arus maksimum (beban penuh, FL). Pengujian regulasi beban diukur dengan menjaga tegangan masukan jala-jala dalam kondisi konstan dengan mengamati perubahan tegangan keluaran ketika beban berubah-ubah dari nol sampai beban penuh.
Untuk mengatasi terhindar dari beban lebih, maka diperlukan pengaturan tegangan beban atau persentase regulasi tegangan. Ada dua macam persentase regulasi tegangan, yaitu :
a. Regulasi Naik
Regulasi Naik = x 100% (2.2)
b. Regulasi Turun
Regulasi Turun = x 100% (2.3)
Dimana (Vt)tb adalah tegangan terminal atau tegangan output generator tanpa beban yang besarnya sama dengan GGL. Sedangkan (Vt)bp adalah tegangan terminal beban penuh dan pada beban penuh arus armatur yang mengalir ke beban juga beban penuh (IL)bp. [13]
2.6 Umpan balik (Feedback)
Rangkaian feedback atau umpan balik merupakan rangkaian sinyal output untuk diumpankan kembali menuju sinyal input. Fungsi dari penggunaan rangkaian ini yaitu untuk menjaga kestabilan tegangan keluaran, sesuai dengan batas kapasitas yang telah ditentukan.
Umpan balik dalam penguat berarti pengembalian sebagian sinyal output ke input. Dalam umpan balik negatip terdapat kategorisasi jenis UB yang didasarkan atas jenis besaran sinyal output yang diambil (tegangan atau arus) dan cara pengembaliannya (secara seri atau paralel). Dengan melibatkan semua kombinasi yang mungkin, maka dapat diperoleh empat jenis UB, yaitu: UB tegangan-seri, UB tegangan-paralel, UB arus-seri, dan UB arus-paralel. Meskipun dengan menerapkan UB (negatip) suatu penguat akan menurun penguatannya, tetapi keuntungan yang diperoleh sangat berarti, misalnya penguatan menjadi stabil, impe- dansi input dan output terkontrol, distorsi berkurang, bandwidth tambah lebar.
Sehingga umpan-balik merupakan mekanisme pengaturan terhadap suatu sistem fisik yang dilakukan sedemikian rupa sehingga mekanisme ini berusaha untuk mempertahankan keadaan tertentu dari sistem yang dikendalikan. Umpan-balik bekerja dengan cara mengukur keadaan aktual sistem fisik dan menentukan sejauh mana keadaan tersebut menyimpang dari keadaan yang diinginkan. Hasil pengukuran ini kemudian digunakan untuk menghasilkan sinyal kendali yang akan dipakai untuk
umpan-balik yang cukup banyak digunakan dewasa ini adalah teknik pengendalian PID.
Sebuah kontroler proporsional-integral-derivatif (PID controller) adalah mekanisme kontrol umpan balik yang biasa digunakan dalam sistem kontrol industri.
Kontroler PID menghitung besarnya nilai error sebagai perbedaan antara proses yang terukur dengan set point yang diinginkan. Kontroler PID digunakan untuk mengupayakan dan meminimalkan error setiap waktunya dengan menyesuaikan output proses kontrol.
Pengendalian umpan balik merupakan proses mengukur keluaran dari sistem yang dibandingkan dengan suatu standar tertentu. Bilamana terjadi perbedaan - perbedaan atau penyimpangan - penyimpangan akan dikoreksi untuk memperbaiki masukan sistem selanjudnya. Study teoritis tentang sistem pengendalian umpan balik disebut dengan cybernetisc. Istilah ini berasal dari bahasa Yunani yaitu kybernettes yang berarati "orang yang mengatur " penerapan suatu pengendalian daam suatu sistem. Sistem pengendalian umpan balik mempunyai 4 komponen dasar, yaitu :
1. Suatu karakteristik atau kondisi yang dikendalikan diukur dari keluarannya.
2. Suatu sensor (censor) yang mengukur karakteristik atau kondisi tersebut.
3. Suatu unit pengendalian (control unit ) yang membandingkan hasil ukuran sensor dengan suatu standar.
4. Suatu unit pengatur (activating unit) yang menghasilkan tindakan penyesuaian untuk masukkan proses selanjutnya.
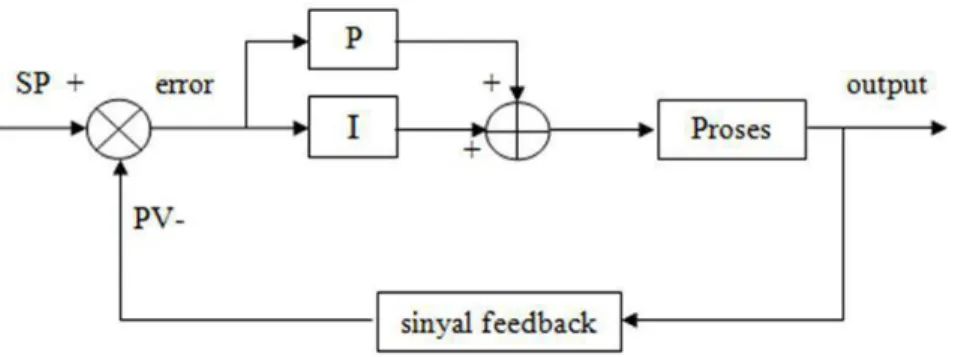
Gambar 2.5 Umpan Balik (Feedback) Sistem
Dari Gambar 2.5 sistem pengendalian umpan balik pengendali akan mengubah besarnya input, sehingga nilai Perancangan kontrol PI ini bertujuan untuk menentukan paramater aksi kontrol Proportional, Integratif pada Catu Daya DC.
Proses ini dapat dilakukan dengan cara trial and error . Pada kendali PI ini kita bertujuan mengolah suatu sinyal kesalahan atau error, nilai error tersebut diolah dengan formula PI untuk dijadikan suatu sinyal kendali atau sinyal kontrol yang akan diteruskan ke rangkaian penguat daya.
SP = Set point, adalah suatu parameter nilai acuan atau nilai yang kita inginkan.
PV = Present Value, adalah nilai bobot pembacaan sensor saat itu atau variabel terukur yang di umpan balikan oleh sensor (sinyal feedback dari sensor).
Error = nilai kesalahan atau simpangan antar variabel terukur (PV) dengan nilai acuan (SP)
2.7 Mikrokontroller
Mikrokontroler (microcontroller) atau disingkat dengan “micron” adalah pengendali yang merupakan suatu komputer kecil yang terletak di dalam sebuah chip atau IC (integrated circuit) yang berisikan inti prosesor, memori, dan komponen input/output yang dapat diprogram.
Mikrokontroler biasa digunakan pada produk dan perangkat yang dapat dikontrol secara otomatis, seperti sistem kontrol mesin mobil (engine control), perangkat medis (medical devices), pengendali jarak jauh (remote control), mesin perkantoran (office machines), dan juga mainan (games). Penggunaan mikrokontroler lebih ekonomis dibandingkan sebuah desain sistem yang berisikan mikroprosesor, memori, dan perangkat input/ouput terpisah. Mikrokontroler adalah komputer mikro dalam satu chip tunggal. Mikrokontroler memadukan CPU, ROM, RWM, I/O paralel, I/O seri, counter-timer, dan rangkaian clock dalam satu chip tunggal seperti terlihat pada Gambar 2.6.
Sama halnya dengan mikroprosesor, mikrokontroler adalah perangkat yang dirancang untuk kebutuhan umum (specific purpose). Sesuai dengan fungsinya sebagai pengendali, mikrokontroler berisikan sepaket chip lengkap yang terdiri dari fitur-fitur pengolah data yang juga terdapat dalam mikroprosesor, ditambah RAM, ROM, I/O, dan fitur lain yang terintegrasi di dalamnya. Contohnya dapat ditemui pada perangkat otomotif, mesin industri, elektronik dan perangkat- perangkat lain yang memiliki embedded sistem di dalamnya. Mikrokontroler sebagai sebuah chip telah mengalami perkembangan baik dari sisi arsitektur, teknologi dan kemampuannya.
Mikrokontroler sebagai teknologi baru yaitu teknologi semikonduktor kehadirannya sangat membantu perkembangan dunia elektronika. Dengan arsitektur yang praktis tetapi memuat banyak kandungan transistor yang terintegrasi, sehingga mendukung dibuatnya rangkaian elektronika yang lebih portable. Mikrokontroler dapat diproduksi secara masal sehingga harganya menjadi lebih murah dibandingkan dengan mikroprosessor, tetapi tetap memiliki kelebihan yang bisa diandalkan.
Gambar 1.2 memperlihatkan beberapa contoh chip mikrokontroler.
Gambar 2.7 Chip Mikrokontroler
Mikrokontroler memiliki perbandingan ROM dan RAM-nya yang besar, artinya program kontrol disimpan dalam ROM (bisa Masked ROM atau Flash PEROM) yang ukurannya relatif lebih besar, sedangkan RAM digunakan sebagai tempat penyimpan sementara, termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan.
Perkembangan Mikrokontroler mengalami perubahan dari segi rancangan dan aplikasinya, seperti faktor kecepatan pengolah data yang semakin meningkat (cepat) dibanding pendahulunya. Seperti halnya sebuah mikroprosesor, mikrokontroler juga berkembang sesuai rancangan dan model-model aplikasinya. Mikrokontroler berdasarkan jumlah bit data yang dapat diolah dapat dibedakan dalam :
1. Mikrokontroler 4 Bit : merupakan mikrokontroler dengan jumlah bit data terkecil. Mikrokontroler jenis ini diproduksi untuk meminimalkan jumlah pin dan ukuran kemasan.
2. Mikrokontroler 8 Bit : merupakan mikrokontroler yang paling banyak digunakan untuk pekerjaan-pekerjaan perhitungan skala kecil. Dalam komunikasi data, Data ASCII serial juga disimpan dalam ukuran 8 bit.
Kebanyakan IC memori dan fungsi logika dibangun menggunakan data 8 bit sehingga interface bus data menjadi sangat mudah dibangun. Penggunaan mikrokontroler 8 bit jauh lebih banyak dibandingkan dengan mikrokontroler 4 bit. Aplikasinya juga sangat variatif mulai dari aplikasi kendali sederhana sampai kendali mesin berkecepatan tinggi.
3. Mikrokontroler 16 Bit : keterbatasan-keterbatasan yang ada pada mikrokontroler 8 bit berkaitan dengan semakin kompleknya pengolahan data dan pengendalian serta kecepatan tanggap/respon disempurnakan dengan menggunakan mikrokontroler 16 bit. Salah satu solusinya adalah dengan menaikkan kecepatan clock, dan ukuran data. Mikrokontroler 16 bit digunakan untuk mengatur tangan robot, dan aplikasi Digital Signal Processing (DSP).
4. Mikrokontroler 32 Bit : ditargetkan untuk aplikasi Robot, Instrumen cerdas, Avionics, Image Processing, Telekomunikasi, Automobil, dan sebagainya.
Program-program aplikasinya bekerja dengan sistim operasi dan dipadukan dengan perangkat pintar lainnya.
Karena kebutuhan yang tinggi terhadap “smart chip” dengan berbagai fasilitasnya, maka berbagai vendor juga berlomba untuk menawarkan produk-produk mikrokontrolernya. Selain mikroprosesor dan mikrokontroler, sebenarnya telah bemunculan chip-chip pintar lain seperti DSP prosesor dan Application Spesific Integrated Circuit (ASIC). Di masa depan, chip-chip mungil berkemampuan sangat
tinggi akan mendominasi semua desain elektronik di dunia sehingga mampu memberikan kemampuan komputasi yang tinggi serta meminimumkan jumlah komponen-komponen konvensional.
Karena kemampuannya yang tinggi, bentuknya yang kecil, konsumsi dayanya yang rendah, dan harga yang murah maka mikrokontroler begitu banyak digunakan di dunia. Mikrokontroler digunakan mulai dari mainan anak-anak, perangkat elektronik rumah tangga, perangkat pendukung otomotif, peralatan industri, peralatan telekomunikasi, peralatan medis dan kedokteran, sampai dengan pengendali robot serta persenjataan militer. Terdapat beberapa keunggulan yang diharapkan dari alat- alat yang berbasis mikrokontroler (microcontroller-based solutions) :
1. Kehandalan tinggi (high reliability) dan kemudahan integrasi dengan komponen lain (high degree of integration)
2. Ukuran yang semakin dapat diperkecil (reduced in size)
3. Penggunaan komponen dipersedikit (reduced component count) yang juga akan menyebabkan biaya produksi dapat semakin ditekan (lower manufacturing cost)
4. Waktu pembuatan lebih singkat (shorter development time) sehingga lebih cepat pula dijual ke pasar sesuai kebutuhan (shorter time to market) 5. Konsumsi daya yang rendah (lower power consumption)
Penerapan teknologi di masyarakat akan memberikan banyak keuntungan.
Mikrokontroler merupakan sebuah sistem komputer fungsional dalam sebuah chip.
Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output. Dengan penggunaan mikrokontroler ini maka:
1. Sistem elektronik akan menjadi lebih ringkas,
2. Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem adalah perangkat lunak yang mudah dimodifikasi,
3. Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang mudah merespons.
Mikrokontroler juga merupakan sebuah prosesor yang digunakan untuk kepentingan kontrol. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroler dibangun dari elemen-
elemen dasar yang sama. Seperti umumnya komputer, mikrokontroler adalah alat yang mengerjakan instruksi–instruksi yang diberikan kepadanya.
Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programer. Program ini mengisntruksikan komputer untuk melakukan tugas yang lebih kompleks yang di inginkan oleh programmer. Beberapa fitur yang umumnya ada di dalam mikrokontroler adalah sebagai berikut:
1. ROM (Read Only Memory)
ROM berfungsi untuk tempat penyimpanan variable. Memori ini bersifat volatile yang berarti akan kehilangan semua datanya jika tidak memdapat catu daya.
2. RAM (Random Access Memory)
RAM digunakan oleh mikrokontroler untuk tempat penyimapan program yang akan diberikan oleh user
3. Register
Merupakan tempat penyimpanan nilai – nilai yang akan digunakan dalam proses yang telah disediakan oleh mikrokontroler.
4. Special Function Register
Merupakan register khusus yang berfungsi untuk mengatur jalanya mikrokontroler. Register ini terletak pada RAM.
5. Input dan Output Pin
Pin input adalah bagian yang berfungsi sebagai penerima signal dari luar, pin ini dapat dihubungkan ke berbagai media inputan seperti keypad, sensor, dan sebagainya. Pin output adalah bagian yang berfungsi untuk mengeluarkan signal dari hasil proses algoritma mikrokontroler.
6. Interupt
Interupt adalah bagian mikrokontroler yang berfungsi sebagai bagian yang dapat melakukan interupsi, sehinga ketika program utama sedang berjalan, program utama tersebut dapat di interupsi dan menjalankan program instrupsi terlebih dahulu.
Rata-rata mikrokontroler memiliki instruksi manipulasi bit, akses ke I/O secara langsung dan mudah, dan proses interupt yang cepat dan efisien. Dengan
kata lain mikrokontroler adalah “Solusi satu Chip” yang secara drastis mengurangi jumlah komponen dan biaya desain (harga relatif murah).
2.8 Mikrokontroller ATMega 328
Mikrokontroller ATMega 328 atau Arduino adalah sebuah nama produk desain sistem minimum mikrokontroler yang di buka secara bebas. Kelebihan dari arduino adalah Arduino mempunyai bahasa pemrograman sendiri, pemrograman yang digunakan adalah bahasa C yang telah dipermudah dengan fungsi-fungsi yang sederhana sehingga pemula pun bisa mempelajarinya dengan cukup mudah.
Arduino juga memiliki program yang namanya boot loader yang sudah di tanam pada mikrokontrolernya, boot loader ini sendiri berfungsi untuk menjembatani antara software compiler arduino dengan mikrokontrolernya yang berfungsi untuk mengontrol dalam bentuk yang kecil. Di sini mikrokontroler memiliki memori sendiri, serta proses-proses yang dapat berdiri sendiri, sehingga ketika dihubungkan dengan input dan output yang lain, pengguna juga dapat mengontrol alat tersebut.
Arduino UNO adalah sebuah papan mikrokontroler yang didasarkan pada ATmega328.
Arduino UNO mempunyai 14 pin data input /output (6 di antaranya dapat digunakan sebagai output PWM), 6 pin input analog, sebuah osilator Kristal 16 MHz, sebuah koneksi USB, sebuah power jack , sebuah ICSP header dan sebuah tombol reset. Arduino UNO mudah sangat mudah untuk dihubungkan ke sebuah komputer dengan sebuah kabel USB atau mensuplainya dengan sebuah adaptor AC ke DC atau menggunakan baterai untuk memulainya.
Arduino UNO adalah sebuah seri terakhir dari board Arduino USB dan model referensi untuk papan Arduino Arduino UNO R3 merupakan board mikrokontroler yang didasarkan pada mikrokontroler jenis ATmega328. Konfigurasi bagian utama mikrokontroler dari Arduino Uno ditunjukkan pada Gambar 2.7 berikut ini.
Gambar 2.8 Konfigurasi Arduino Uno
Dari gambar 2.8 dijelaskan bahwa kofigurasi Arduino Uno yaitu sebagai berikut.
a. Universal Asynchronous Receiver/Transmitter (UART) adalah antar muka yang digunakanuntuk komunikasi serial seperti pada RS-232, RS-422 dan RS-485.
b. 2KB RAM pada memory kerja bersifat volatile (hilang saat daya dimatikan), digunakan oleh variable-variabel di dalam program.
c. 32KB RAM flash memory bersifat non-volatile, digunakan untuk menyimpan program yang dimuat dari komputer. Selain program, flash memory juga menyimpan bootloader. Bootloader adalah program inisialisasi yang ukurannya kecil, dijalankan oleh CPU saat daya dihidupkan. Setelah boot loader selesai dijalankan, berikutnya program di dalam RAM akan dieksekusi.
d. 1KB EEPROM bersifat non-volatile, digunakan untuk menyimpan data yang tidak boleh hilang saat daya dimatikan. Tidak digunakan pada papan Arduino.
e. Central Processing Unit (CPU), bagian dari mikrokontroler untuk menjalankan setiap instruksi dari program.
f. Port input/output, pin-pin untuk menerima data (input) digital atau analog, dan mengeluarkan data (output) digital atau analog.
1. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
2. 32 x 8-bit register serba guna.
3. Kecepatan mencapai 16 MPS dengan clock 16 MHz.
4. 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2KB dari flash memori sebagai bootloader. Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1 KB sebagai tempat penyimpanan data semi permanent karenaa EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
5. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.Mikrokontroler ATMega328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja.
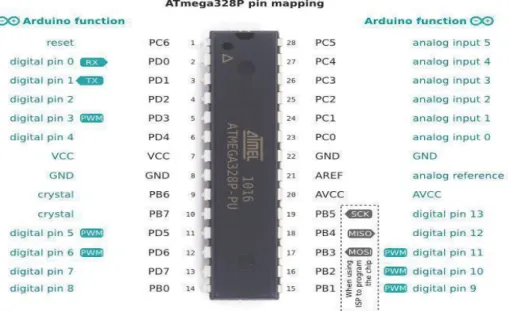
Gambar 2.9 Pin Mikrokontroler Atmega 328
Konfigurasi pin ATMega 328 dengan kemasan 28 pin DIP (Dual Inline Package) dapat dilihat pada gambar di atas. Dari gambar di atas dapat dijelaskan fungsi dari masing-masing pin ATMega328 sebagai berikut : ATMega328 memiliki 3 buah PORT utama yaitu PORTB, PORTC, dan PORTD dengan total pin input/output sebanyak 23 pin.[15] PORT tersebut dapat difungsikan sebagai input/output digital atau difungsikan sebagai periperal lainnya.
1. Port B
Port B merupakan jalur data 8 bit yang dapat difungsikan sebagai input/output. Selain itu PORTB juga dapat memiliki fungsi alternatif seperti di bawah ini.
a. ICP1 (PB0), berfungsi sebagai Timer Counter 1 input capture pin.
b. OC1A (PB1), OC1B (PB2) dan OC2 (PB3) dapat difungsikan sebagai keluaran PWM (Pulse Width Modulation).
c. MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakan jalur komunikasi SPI. Selain itu pin ini juga berfungsi sebagai jalur pemograman serial (ISP).
d. TOSC1 (PB6) dan TOSC2 (PB7) dapat difungsikan sebagai sumber clock external untuk timer.
e. XTAL1 (PB6) dan XTAL2 (PB7) merupakan sumber clock utama mikrokontroler.
2. Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebagai
input/output digital. Fungsi alternatif PORTC antara lain sebagai berikut.
a. ADC6 channel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10 bit. ADC dapat kita gunakan untuk mengubah input yang berupa tegangan analog menjadi data digital
b. I2C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada PORTC. I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data tipe I2C seperti sensor kompas, accelerometer nunchuck.
3. Port D
Port D merupakan jalur data 8 bit yang masing-masing pin-nya juga dapat difungsikan sebagai input/output. Sama seperti Port B dan Port C, Port D juga memiliki fungsi alternatif dibawah ini.
a. USART (TXD dan RXD) merupakan jalur data komunikasi serial dengan level sinyal TTL. Pin TXD berfungsi untuk mengirimkan data serial, sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsiuntuk menerima data serial.
b. Interrupt (INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai interupsi hardware. Interupsi biasanya digunakan sebagai selaan dari program, misalkan pada saat program berjalan kemudian terjadi interupsi hardware/software maka program utama akan berhenti dan akan menjalankan program interupsi.
c. XCK dapat difungsikan sebagai sumber clock external untuk USART, namun kita juga dapat memanfaatkan clock dari CPU, sehingga tidak perlu membutuhkan external clock.
d. T0 dan T1 berfungsi sebagai masukan counter external untuk timer 1 dan timer 0.
e. AIN0 dan AIN1 keduanya merupakan masukan input untuk analog comparator.
Hanya dengan menghubungkannya ke sebuah komputer melalui USB atau memberikan tegangan DC dari baterai atau adaptor AC ke DC sudah dapat membuanya bekerja. [16].
Setelah mengenal bagian-bagian utama dari mikrokontroler Atmega sebagai komponen utama, selanjutnya kita akan mengenal bagian-bagian dari papan Arduino seperti yang ditunjukkan pada Gambar 2.11.
Gambar 2.10 Papan Arduino Uno
Arduino Uno berbeda dari semua board Arduino yang telah dibuat sebelumnya, Arduino UNO tidak menggunakan chip driver FTDI USB-to-serial.
Sebaliknya, fitur-fitur Atmega16U2 (Atmega8U2 sampai ke versi R2) diprogram
2.8.1 Komunikasi Serial Mikrokontroler
Komunikasi Serial adalah komunikasi yang pengiriman data per-bit secara berurutan dan bergantian. Komunikasi ini mempunyai kelebihan yaitu hanya membutukan satu jalur dan kabel yang sedikit dibandingkan dengan komunikasi paralel. Pada prinsipnya komunikasi serial merupakan komunikasi dimana pengiriman data dilakukan per bit sehinga lebih lambat dibandingkan komunikasi paralel, atau dengan kata lain komunikasi serial merupakan salah satu metode komunikasi data dimana hanya satu bit data yang dikirimkan melalui seuntai kabel pada satu waktu tertentu. Pada dasarnya komunikasi serial adalah kasus khusus komunikasi paralel dengan nilai n = 1, atau dengan kata lain adalah suatu bentuk komunikasi paralel dengan jumlah kabel hanya satu dan hanya mengirimkan satu bit data secara simultan. Hal ini dapat disandingkan dengan komunikasi paralel yang sesungguhnya di mana n-bit data dikirimkan bersamaan, dengan nilai umumnya 8 ≤ n
≤ 128.
Komunikasi serial ada dua macam, asynchronous serial dan synchronous serial. Synchronous serial adalah komunikasi dimana hanya ada satu pihak (pengirim atau penerima) yang menghasilkan clock dan mengirimkan clock tersebut bersama- sama dengan data. Contoh pengunaan synchronous serial terdapat pada transmisi data keyboard. Asynchronous serial adalah komunikasi dimana kedua pihak (pengirim dan penerima) masing-masing menghasilkan clock namun hanya data yang ditransmisikan, tanpa clock. Agar data yang dikirimkan sama dengan data yang diterima, maka kedua frekuensi clock harus sama dan harus terdapat sinkronisasi.
Setelah adanya sinkronisasi, pengirim akan mengirimkan datanya sesuai dengan frekuensi clock penerima. Contoh penggunaan asynchronous serial adalah pada Universal Asynchronous Receiver Transmitter (UART) yang digunakan pada serial port (COM) komputer.
Antarmuka kanal serial lebih kompleks/sulit dibandingkan dengan antarmuka melalui kanal paralel, hal ini disebabkan karena :
1. Dari segi perangkat keras : adanya proses konversi data paralel menjadi serial atau sebaliknya menggunakan piranti tambahan