MODEL KONTROL LAMPU RUANGAN MENGGUNAKAN SENSOR PIR DAN SENSOR CAHAYA
Achmad Syafaat
E-mail : [email protected]
Program Studi Ilmu Komputer-FMIPA Universitas Pakuan ABSTRAK
Seiring perkembangan ilmu pengetahuan dan teknologi, saat sekarang banyak muncul gagasan-gagasan bidang elektronika digital. Sistem digital berkembang dengan adanya teknologi mikrokontroler. Sistem ini menyederhanakan sistem yang masih konvensional menjadi otomatis dan lebih ringkas. Tugas akhir ini dimaksudkan mengkaji pemanfaatan mikrokontroler untuk otomatis lampu Ruangan. Umumnya lampu di dalam Ruangan masih menggunakan saklar analog, sehingga pemilik rumah harus menyalakan dan mematikan lampu secara manual. Adanya rangkaian pengontrol perangkat listrik, pemilik rumah dapat mengontrol lampu dengan pewaktuan menyala dan mati lampu secara otomatis sesuai kebutuhan. Proses otomatisasi tersebut dikontrol menggunakan program mikrokontroler sehingga dapat mengerakan relay dan mengontrol lampu. Penyusunan laporan tugas akhir ini memerlukan metode observasi, metode interview, metode dokumentasi dan metode studi pustaka. Dari hasil uji coba yang telah dilakukan menunjukkan bahwa rangkaian ini bekerja dengan baik.
Kata Kunci : Lampu Ruangan & Sensor PIR dan Sensor LDR Pendahuluan
Penerangan menjadi salah satu bagian penting dalam sebuah kehidupan manusia, banyak dari setiap aktifitas manusia membutuhkan penerangan terutama didalam ruangan, hal ini karena terbatasnya cahaya yang masuk dari luar kedalam sebuah ruangan, oleh karena itu sistem penerangan melalui lampu menjadi pilihan utama dalam menjalankan aktifitas, terutama didalam ruangan. Dalam sebuah ruangan seseorang harus menyalakan lampu melalui tombol yang biasanya terpasang didinding terlebih dahulu, untuk kemudian melakukan aktifitasnya setelah lampu menyala. Begitu pula apabila seseorang ingin keluar ruangan terlebih dahulu harus mematikan lampu dengan alasan penghematan listrik, padahal kondisi yang memang tidak pasti, apakah kita sedang membawa banyak barang ditangan kita apa tidak. Permasalahan
tersebut dapat mengganggu aktifitas dan efisiensi kerja kita. Tentu saja hal ini akan menjadi sebuah masalah nantinya terlebih seseorang harus menyalakan terlebih dahulu menyalakan secara manual dan akan menyulitkan pengguna dari segi operasionalnya.
Belum adanya sistem yang secara otomatis mengontrol operasional sebagai pengganti sakelar lampu manual, menjadi sebuah permasalahan tersendiri terlebih dari segi operasional, efektifitas serta keamananya. Banyak kasus yang sudah terjadi seseorang terkena sengatan listrik karena menyalakan lampu melalui saklar manual tetapi orang itu tidak ingin bahwa tangannya, tangan dari orang yang hendak menyalakan lampu tersebut basah terkena air. Hal ini mengakibatkan efek atau dampak yang sangat fatal terjadi dan menimpa orang tersebut. Oleh karena itu dibutuhkan sebuah sesitem yang sudah
terancang secara otomatis, untuk mengontrol operasional sebagai pengganti saklar manual, tanpa menyentuh dari alat tersebut, cukup dengan sebuah gerakan yang diberikan terhadap sebuah sensor yang sebelumnya telah dirancang sedemikian rupa.
Dari beberapa uraian permasalahan diatas penulis bermaksud ingin membuat sebuah prototype saklar lampu menggunakan passive infrared receiver (PIR) berbasis mikrokontroler arduino. Alat ini akan bekerja sesuai dengan perintah melalui gerakan yang telah dirancang sedemikan rupa, sehingga akan mempermudah pemakaiannya dan lebih aman.
SistemInstrumentasi
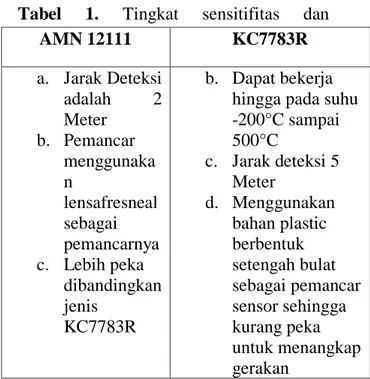
1. Pasif Infrared Recceiver (PIR) Passive Infrared Receiver (PIR) merupakan sebuah sensor berbasiskan infrared. Akan tetapi, tidak seperti sensor infrared kebanyakan yang terdiri dari IR LED dan fototransistor. Passive Infrared Receiver (PIR) tidak memancarkan apapun seperti IR LED. Sesuai dengan namanya „Passive‟, sensor ini hanya merespon energy dari pancaran sinar inframerah pasif yang dimiliki oleh setiap benda yang terdetiksi olehnya. Benda yang bisa dideteksi oleh sensor ini biasanya adalah tubuh manusia. Passive Infrared Receiver (PIR) KC7783R merupakan sensor pendeteksi yang akan mengeluarkan output dengan level high antara 5-6 volt. Daya peka dari sensor ini tekgolong cukup baik dan mempunyai area jangkauan kurang lebih sampai 5 meter dan dapat mendeteksi benda yang sampai pada suhu 500°C. Akan tetapi kepekaan yang dimiliki sensor jenis KC7783R ini masih kurang dibandingkan dengan sensor lain yang serupa salah satunya adalah sensor pir AMN 12111. Sensor ini lebih baik dibandingkan sensor KC7783R. berikut adalah perbandingan dari dua sensor
tersebut.
Tabel 1. Tingkat sensitifitas dan
spesifikasi Komponen PIR
2. Arduino Uno
Arduino Uno pengendali mikro single-board yang bersifat open-source, diturunkan dari wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang. Mikrokontroler berbasis Uno (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator Kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan board arduino Uno ke computer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya. Uno berbeda dengan semua board sebelumya dalam hal koneksi USB-to-serial yaitu menggunakan fitur Atmega8U2 yang diprogram sebagai converter USB-to-serial berbeda dengan board sebelumnya yang menggunakan chip FTDI drver
USB-to-AMN 12111 KC7783R a. Jarak Deteksi adalah 2 Meter b. Pemancar menggunaka n lensafresneal sebagai pemancarnya c. Lebih peka dibandingkan jenis KC7783R b. Dapat bekerja hingga pada suhu -200°C sampai 500°C c. Jarak deteksi 5 Meter d. Menggunakan bahan plastic berbentuk setengah bulat sebagai pemancar sensor sehingga kurang peka untuk menangkap gerakan
serial.
3. Lampu
Lampu adalah sumber cahaya buatan yang dihasilkan melalui aliran arus listrik yang mengalir pada filamen sehingga terjadilah pemanasan dan pada akhirnya filamen tersebut mampu menghasilkan cahaya. Adapun kaca yang terdapat pada lampu berfungsi untuk melindungi filament lampu serta menjaga filamen panas dari kemungkinan terjadinya oksidasi dengan udara luar.. 4. Relay
Relay adalah saklar (switch) yang diopersikan secara listrik dan merupakan komponen electromechanical (elektromekanikal) yang terdiri dari 2 bagian utama yakni electromagnet (coil) dan mekanikal (seperangkat kontak saklar/switch). relay menggunakan prinsip elektromagnetik untuk menggerakkan kontak saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan tinggi. Sebagai contoh, relay yang menggunakan electromagnet 5v dan 50 mA mampu menggerakan Armature relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.
Gambar 1. Prinsip kerja Relay Metode Penelitian
Model sistem kontrol lampu ruangan menggunakan metode penelitian bidang hardwareprograming. Tahapan pada metode penelitian ini yaitu perancangan, penelitian, pengetesan komponen, desain system mekanik, desain system listrik, desain software, tes fungsional, integrasi atau perakitan, tes fungsional keseluruhan sistem, Aplikasi sistem.
1. WaktuDan TempatPenelitian
Penelitian ini dilaksanakan mulai Bulan Agustus 2015 sampai Desember 2015. Waktu pelaksanaan dilaksanakan setiap hari senin sampai dengan hari kamis, mulai dari jam 10.00 sampai jam 15.00 WIB di Laboratorium Workshop Program Studi Ilmu Komputer FMIPA Universitas Pakuan Bogor.
2. Urutan Rangkayan Prototype
Perancangan hardware secara umum digambarkan pada Urutan Rangkayan Prototype seperti terlihat dalam gambar 1 berikut ini.
Gambar 2. Urutan Rangkaian Prototype Apabila seseorang masuk kedalam sebuah ruangan maka gerakan dari orang tersebut akan terdeteksi oleh sensor PIR akan mendeteksi adanya gerakan yang dilakukan oleh manusia didalam suatu ruangan.
3. AlgoritmaSistem
Pembuatan perangkat lunak sistem harus mengutamakan cara kerja yang efisien berikut flowchart dari desain software yang digunakan. Flowchart program utama terdapat pada gambar 2.
Lampu Nyala Lampu Mati IF PIR HIGH Baca input Sensor PIR dan Sensor LDR MULAI SELESAI N Y
Dari gambar flowchart diatas merupakan fungsi dasar dari aplikasi yang akan dibuat. Tahap awal adalah menerima gerakan dari manusia. Apabila sensor menangkap adanya gerakan dari manusi, maka selanjutnya secara otomatis sensor mengirim data ke mikrokontroler sebagai pusat dari system. Selanjutnya mikrokontroler melakukan tugasnya dengan mengaktifkan LDR sebagai control untuk mengaktifkan lampu. Setelah LDR bekerja maka system saklar otomatis telah aktif. Untuk mematikan dan menyalakan lampu pengguna cukup dengan menutup atau membuka LDR yang terpasang. Hasil Dan Pembahasan
1. Pengujian Struktural
Tahapan ini dilakukan dengan tujuan untuk mengetahui apakah system yang sudah dibuat sesuai dengan rancangan yang sudah ada. Uji coba ini dilakukan dengan menguji pin2 hingga pin12 untuk input dan output digital. Dan pin analog0 sampai pin analog5 untuk input berupa analog. Pengujian dilakukan dengan cara antara lain:
1. Pin ground dan vcc dihubungkan pada protoboard
2. Pin 2 digital dihubungkan dengan output dari sensor gerak.
3. Pin 9 digital dihubungkan dengan input Relay
4. Pin A0 dihubungkan dengan input analog LDR
Tabel 2. hasil pengujian structural system control lampu otomatis
2. Pengujian Fungsional
Pada tahap ini dilakukan pengujian yang bertujuan untuk mengetahui apakah semua komponen dapat berfungsi dengan baik. Untuk pengujian perangkat keras yang digunakan adalah multimeter dengan pada satuan daya DC volt, dimana pena positif pada multimeter dihubungkan ke vcc dan pena negative pada multimeter dihubungkan ke Ground.
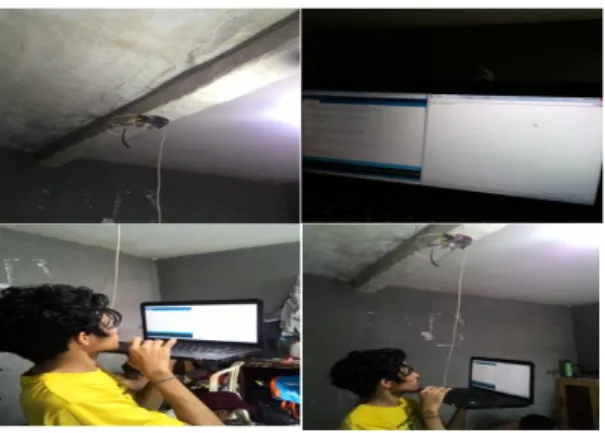
Untuk uji coba sensor dilakukan dengan mengetes sensor dihubungkan pada mikrokontroler dan dilihat melalui serial monitor.
Gambar 4. Ujicoba fungsional mikrokontroler
Gambar diatas mengindikasikan bahwa mikrokontroler telah bekerja. Hal itu dapat dilihat dari lampu indicator mikrokontroler yang bekerja. Dengan demikian mikrokontroler lolos pengujian fungsional. 3. Sensor Gerak (PIR)
Gambar 5. Ujicoba Fungsional Sensor Gerak (PIR)
Gambar diatas mengindikasikan bahwa sensor telah bekerja. Hal itu dapat dilihat dari lampu indicator sensor yang menyala apabila mendeteksi gerakan. Dengan demikian sensor gerak ini telah lulus ujicoba fungsiona
4. Lampu
Gambar 6. Ujicoba fungsional lampu Gambar diatas mengindikasikan bahwa lampu telah bekerja. Hal ini dapat dilihat ketika sensor mendeteksi gerakan yang menuju LDR maka secara otomatis lampu akan menyala.
5. LDR
Pengujian LDR dilakukan dengan memasang LDR, dengan tujuan agar ldr dapat bekerja pada siang hari disaat ada cahaya, pengetesan ini dilakukan dengan dibantu dengan menggunakan mikrokontroler arduino dan software arduino alfa 1.0.5. jika LDR berfungsi dengan baik maka didalam serial monitor didalam software akan bekerja seperti pada gambar dibawah:
Gambar 7.Ujicoba Validasi LDR
Gambar diatas terdiri dari 2 indikasi. Indikasi pertama mengindikasikan aktifasi PIR, dan yang kedua mengindikasikan inputan dari LDR. Dari gambar diatas terlihat bahwa LDR bekerja dengan sempurna membaca intensitas cahaya dalam ruangan.
Berikut adalah table hasil dari ujicoba fungsional yang telah dilakukan secara keseluruhan alat yang telah diuji seperti diatas.
Tabel 3. Hasil pengujian fungsional
Komponen Keterangan
PIR Berfungsi
LDR Berfungsi
Lampu Berfungsi
Mikrokontroler Berfungsi
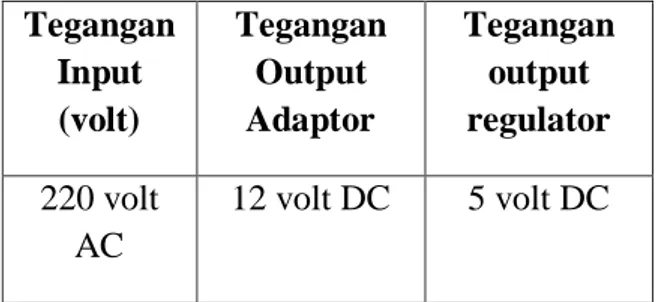
6. Pengujian Blok Catu Daya Pada Sensor
Pengujian ini berfungsi untuk mengetahui tegangan yang dihasilkan oleh rangkaian catu daya, sehingga dapat dipastikan jika ada kesalahan dalam catu daya. Catu daya menggunakan adaptor dan rangkaian regulator sehingga arus yang masuk pada sensor tepat 5 volt. Catu daya ini berfungsi untuk menyuplai arus ke positif pada multimeter dihubungkan pada kabel positif dan pena negative pada multimeter dihubungkan pada kabel negative. Jika hasil pengukuran berbeda, dapat saja terjadi karena alat pengukur yang rusak atau kerusakan pada kabel. Hasil pengukuran dapat dilihat pada table. Tabel 4. Pengujian Blok Catu Daya pada Sensor
Tegangan Input (volt) Tegangan Output Adaptor Tegangan output regulator 220 volt AC 12 volt DC 5 volt DC
Tabel 4. dijelaskan bahwa port yang digunakan dari keseluruhan komponen hanya beberapa port saja, tidak semua port pada mikrokontroler ATMega32 digunakan. Tujuan dari pengujian pin-pin tersebut, yaitu untuk mengetahui apakah masih ada pin-pin dari komponen yang sudah terhubung atau belum, karena jika salah satu pin komponen yang tidak sesuai dan tidak terhubung maka komponen tersebut tidak akan berjalan sesuai dengan apa yang kita inginkan.
Pengujian Software
Pengujian terhadap software dilakukan untuk mengetahui kemungkinan tidak berfungsinya beberapa menu bahkan lebih, sehingga dapat membuat waktu pembuatan (Assembling) akan terganggu, dengan memastikan tidak adanya kendala tersebut diharapkan dalam pembuatan software yang terkait akan lebih cepat, tepat dan efisien.
1. Pengujian Program
Pengujian program dilakukan untuk mengetahui listing program yang dibuat sudah sesuai dengan yang diinginkan, termasuk mengetahui masih ada error atau tidak. Berikut pengujian program ditunjukan pada gambar 8.
Gambar 8. Pengujian Program
Validasi Sistem
Validasi Sistem ini dilakukan bertujuan untuk mengetahui apakah sistem yang telah dirancang sudah bekerja dengan baik atau belum, dalam hal ini apakah sistem otomatis berjalan sesuai perintah, saat seseorang masuk kedalam sebuah ruangan maka gerakan dari orang tersebut akan terdeteksi oleh sensor PIR akan mendeteksi adanya gerakan yang dilakukan oleh manusia didalam suatu ruangan
1. Pengujian Sensor
Pada pengujian ini dilakukan dengan menghubungkan arduino terhadap PC dan dilakukan pengujian menggunakan software arduino IDE. Pada serial monitor terlihat saat ada gerakan terdeteksi maka inputan HIGH jika .tidak ada gerakan. maka inputan LOW.
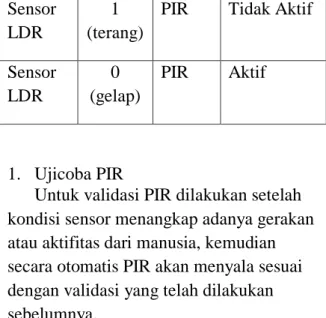
Gambar 9.pengujian validasi aeduino Tabel 5. Validasi Sensor
Validas i Kondis i Senso r Keteranga n
Sensor LDR
1 (terang)
PIR Tidak Aktif
Sensor LDR 0 (gelap) PIR Aktif 1. Ujicoba PIR
Untuk validasi PIR dilakukan setelah kondisi sensor menangkap adanya gerakan atau aktifitas dari manusia, kemudian secara otomatis PIR akan menyala sesuai dengan validasi yang telah dilakukan sebelumnya.
Dari validasi yang telah dilakukan pada LDR maka diperoleh hasil sebagai berikut. Tabel 6. Validasi PIR
Lampu akan berganti status apabila PIR dihalangi karena nilai PIR yang sebelumnya adalah 1 (satu) berubah menjadi 0 (Nol). Akan tetapi jika PIR tidak dihalangi maka PIR akan mendapat nilai 1 (satu) yang berarti lampu tidak ada perubahan pada status lampu kondisi ini dinamakan No Change.
Secara keseluruhan system kerja dari rangkaian yang telah dibuat tersaji dalam sebuah table sebagai berikut:
Tabel 7. Sistem kerja secara Keseluruhan
Pada table ini dijalaskan jika kondisi sensor mempunyai nilai 0 (nol), kondisi ldr0 (nol) dan kondisi lampu adalah No Change maka status lampu tetap 0 (nol). Kondisi ini disebabkan karena itu statusnya adalah 0 (nol).
Pada kondisi sensor mempudnyai nilai 1 (satu) atau bekerja. Jika kondisi sensor aktif dan LDR statusnya 0 (Nol), maka lampu akan mempunyai status yang tidak berubah seperti kondisi awal. Jika pada kondisi sensor mempunyai status 1,LDR statusnya 0 (nol) maka lampu akan berubah status dari kondisi awal, begitu pula sebaliknya, jika kondisi sensor 1 (satu), kondisi LDR 1 (satu), maka kondisi lampu akan berubah menjadi tidak aktif. 2. Ujicoba Jarak Sensor PIR
Tahap ini dilakukan untuk menguji jarak dari sensor PIR dan manusia sebagai pendeteksi manusia. Dimana pengujinya dilakuan dengan cara mengetes alat yang sudah jadi dengan berbeda jarak antara manusia sama sensor PIR
Validasi Kondisi Alat Keterangan PIR 1 Lampu Aktif
PIR 0 Lampu No Change
Alat Kondisi Sensor PIR 0 1 LDR 0 1 0 Kondisi lampu NC NC 0 1 Hasil lampu NC NC 1 0
Gambar 10. Pengujian Jarak Sensor Pir ke manusia
Tabel 8. Validasi Pergerak Pintu Penempatan pupuk
Jarak Sensor PIR ke Manusia
Keterangan
1 meter PIR Mendeteksi pergerakan 3 meter PIR Mendeteksi
pergerakan 5 meter PIR Mendeteksi
pergerakan 6 meter PIR Tidak
Mendeteksi Pergerakan Dari table 8. Jarak Sensor PIR kemanusia, jika 1 meter pir mendeteksi pergerakan jika 3 meter pir mendeteksi pergerakan jika 5 meter pir masih
mendeteksi pergerakan jika 6 meter sensor pir tidak lagi mendeteksi pergerakan.
1. Langkah kerja system
Gambar 11. Kondisi awal sampai akhir Sistem
5.5 Optimasi Sistem (Optimization) System yang telah dibuat, masih dapat dioptimalkan untuk memaksimalkan performa dari alat yang dibangun. Optimalisasi dapat dilakukan dengan meletekan system kontrrol dan interface pada tempat yang strategis. System control hendaknya tersimpan ditempat yang aman namun terjangkau. Sedangkan system interface diletakan pada posisi dimana sensor dapat bekerja secara maksimal. Untuk peletakan sensor gerak, harus ditempatkan diatas ruangan, sehingga sensor dapat menangkap gerakan dengan sempurna. Sehingga pengoprsian lebih maksimal
Kesimpulan
Pada penelitian kali ini bertujuan untuk membuat “Model Sistem Kontrol Lampu Ruangan Menggunakan Sensor Pir dan Sensor Cahaya” dirancang dan dibuat sebagai prototype untuk menampilkan bahwa banyak sekali pengendali lampu yang dapat kita gunakan dengan memanfaatkan konsep pergerakan dari manusia menggunakan sensor PIR.
Berdasarkan hasil ujicoba yang dilakukan dapat diambil kesimpulan bahwa system telah dibuat sesuai dengan struktur dan system telah berfungsi dengan baik.Lampu dinyalakan dan dimatikan dengan menggunakan pergerakan manusia yang melewati sensor PIR tanpa melalui saklar sebagaimana mestinya namun penempatan sensor PIR ini memiliki jarak maksimal jangkauanhanya 5 meter.
Alat yang dibuat memiliki
kelebihan dan kekurangan. Kelebihan alat ini mudah untuk digunakan, mudah untuk membangun / mempelajarI sistemnya serta
komponen-komponen pembangun system yang mudah ditemukan.Kekurangan dari system ini adalah hanya dapat membaca pergerakan manusia.
DAFTAR PUSTAKA
Kristian, Adri. 2012. perancangan saklar lampu otomatis menggunakan sensor
cahaya ldr (light dependent resistor) berbasis mikrokontroler at89s52.
Universitas Gunadarma
Nurzaman, Forzi.2008. rancang bangun pensaklaran lampu otomatis yang
terhubung dengan hp menggunakan mikrokontroler atmega8535 Setianto, Kurniawan. 2006. pengendali lampu taman sistem telepon berbasis
mikrokontroler at89s51. Universitas Negeri Semarang
Djuandji, Feri. 2011. Pengenalan Arduino https://sites.google.com/site/informasiterba rusekali/pengertian-mikrokontroller http://id.wikipedia.org/wiki/LDR http://ghavianarduino.blogspot.com/2013/ 09/pengertian-arduino.html http://tarduino.wordpress.com/2011/03/31/ arduino-uno/ http://elektronika-dasar.web.id/teori-elektronika/lcd-liquid-cristal-display/