Makalah Kerja Praktek
PRESSURE CONTROL INTERFACE SYSTEM PEMBANGKIT LISTRIK TENAGA
PANAS BUMI CHEVRON GEOTHERMAL INDONESIA
Lutfi Nur R (21060110120054)[1] Sumardi ST,MT (196811111994121001) Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro
Abstrak
Control and automation system sangat berperan memberi kemudahan dalam proses industry, tidak terkecuali industry yang bergerak di bidang pembangkitan energy listrik/power plant. Dengan sistem kontrol / otomasi dapat memudahkan kita sebagai user/pengelola untuk dapat menjalankan system pembangkitan tersebut. Dimana pengontrolan dilakukan untuk memonitoring keadaan instrument dan objek yang dikontrol sehingga dapat memperoleh keadaan yang diinginkan oleh user. Pengontrolan dan pemonitoringan ini dilakukan dalam system control yang terpusat yang bisa disebut sebagai DCS.
Pressure control interface system merupakan pengontrolan tekanan pada bagian awal, metode yang digunakan yaitu metode zero venting. Komponen yang digunakan untuk metode ini yaitu Inline valve, vent valve, pressure relief valve dan muffler (silencer). Ketiga komponen ini saling terintegrasi proses berjalannya.
Integrasi semua system komponen tersebut digunakan untuk mengendalikan besarnya tekanan steam yang digunakan untuk memutar turbin pada power plant, selain itu juga untuk melindungi instrument dalam power plant.
Kata kunci :Control and automation, power plant, DCS, Pressure Control Interface, Muffler, Zero Venting I. PENDAHULUAN
1.1 Latar Belakang
Perkembangan Industri yang bergerak maju dengan pesat, akan menuntut penyediaan energi yang cukup besar pula, terlebih lagi pada negara-negara berkembang. Pembangkit tenaga listrik merupakan salah satu penyedia yang memiliki kontribusi yang sangat penting di
antara penunjang-penunjang energi lain.
Berbagai macam sumber energi yang dapat digunakan pada suatu pusat pembangkit listrik dapat di kategorikan sebagai berikut :
1. Sumber energi dari alam seperti air, panas bumi, angin, matahari.
2. Sumber energi dalam bentuk bahan bakar seperti minyak bumi, batu bara, dan gas alam.
Sumber energi tersebut bisa di gunakan dalam PLTA, PLTU, PLTG, PLTP. Salah satu pusat pembangkit tenaga yang menghasilkan energi listrik adalah PLTP (Pembangkit Listrik Tenaga Panas). Perubahan energi yang terjadi di awali dengan perubahan energi yang terkandung dalam uap panas di dalam bumi yang tersalurkan keluar dari celah di kerak bumi. Kemudian panas tersebut di gunakan untuk menggerakkan turbin yang di teruskan untuk menggerakkan generator. Generator ini yang mengubah dari energi mekanis menjadi energi listrik.
1.2 Pembatasan Masalah
Dalam Laporan Kerja Praktek ini, penulis membatasi masalah pada system pengontrolan pembukaan valve system interface PCV 406, 421, dan 505 Unit III.
II. Dasar Teori 2.1 Jenis Valve
Katup (valve) merupakan peralatan
mekanis yang digunakan untuk mengatur aliran
suatu fluida. Valve mengontrol fluida dengan
cara dengan cara :
Menghentikan dan meneruskan laju fluida
(0/1)
Memvariasikan laju fluida yang mengalir
(modulated)
Mengontrol arah aliran fluida
2.1.2 Karakteristik Aliran Valve
Karakteristik aliran (flow characteristic)
sebuah control valve adalah hubungan antara
bukaan valve (travel) dengan flow rate pada
tekanan drop konstan seperti yang
diperlihatkan pada dibawah.
Ada 3 karakteristik aliran sebuah valve seperti berikut:
Gambar 2. 1 Karakteristik Aliran 1. Quick Opening
Bukaan (travel) yang kecil memberikan
kenaikan yang besar pada flow rate.
Digunakan pada proses yang
membutuhkan flow rate seketika dalam
jumlah besar seperti safety
system dan metering.
2. Linear
Bukaan valve berbanding lurus dengan flow
rate. Digunakan pada aplikasi
dimana pressuredrop pada valve
cenderung konstan seperti pada level
control dan flow control loop. 3. Equal Percentage
Equal Percentage merupakan kebalikan
dari quick opening, yaitu ketika diberikan
bukaan valve yang besar, maka dampaknya
hanya akan memberikan flow rate yang
kecil. Pada model ini digunakan pada
proses yang membutuhkan pressure drop
yang besar pada valve, seperti pressure
control dan temperature control.
2.2 HPU (Hydraulic Power Unit)
Hydraulic Power Unit adalah komponen pendorong utama dari sistem hidrolik. Sebuah sistem hidrolik menggunakan fluida tertutup untuk mentransfer energi dari satu sumber ke sumber lain, dan kemudian membuat gerakan
berputar , gerakan linier , atau gaya. Hydraulic
Power Unit didasarkan pada hukum Pascal yang menyatakan tekanan yang diberikan zat cair dalam ruang tertutup diteruskan ke segala
arah dengan sama besar. Prinsip ini
memungkinkan untuk menghasilkan usaha yang besar yang akan dihasilkan dari usaha yang relatif kecil.
Gaya yang diberikan oleh silinder
tergantung pada lubang silinder ukuran dan tekanan pompa. (Tidak ada gaya yang dihasilkan kecuali ada perlawanan terhadap
gerakan piston). Rangkaian Hydraulic Power
Unit sederhana terdiri dari motor, reservoir,
hydraulic pump, valve, 3-way directional control valve, dan single acting cylinder.
a. Pompa hidrolik
Pompa hidrolik berfungsi untuk memompa fluida hidrolik pada tekanan tertentu kepada sistem hidrolik.Pompa ini digerakkan oleh motor listrik.
Gambar 2.2 Pompa Hidrolik
Pompa pada Hydraulic Power Unit akan
menggerakan displacement gear pump pada
kisaran 10.2 gpm pada tekanan 270 barg. Pompa dirancang untuk mengoperasikan ketiga valve pada saat kondisi nominal buka ke tutup atau sebaliknya selama 20 detik.
b. Reservoir
Sebagai tempat penyimpanan fluida hidrolik untuk mengakumulasi perubahan volume fluida pada saat sistem bekerja. Pada tangki hidrolik juga didesain adanta suatu sistem untuk memisahkan udara dari fluida hidrolik, karena
adanya udara di dalam fluida dapat
mengganggu kerja sistem.
c. Akumulator
Gambar 2.3 Akumulator
Akumulator berfungsi sebagai penyimpan energi tekanan pada fluida hidrolik dengan menggunakan gas. Fungsi penyimpanan energi tekanan tersebut adalah untuk menstabilkan tekanan fluida apabila terjadi penurunan
tekanan tiba-tiba yang sesaat, agar tidak mengganggu aktuator yang sedang bekerja.
III. Pressure Control System Interface 3.1 Overview Pressure Control
Steam pressure control Darajat baik unit 2 dan unit 3 mempunyai desain konfigurasi tipe pengontrolan nihil pengeluaran ke udara atau
zero venting (ketika steam tidak diperlukan
pressure control valve tertutup menghentikan aliran steam tanpa pengeluaran ke udara /venting). Komponen sistem ini terdiri dari pressure relief, katup pengontrol / pressure
control valve (inline PCV & vent PCV) dan
muffler atau silencer.
Pressure relief berfungsi sebagai proteksi
terhadap tekanan lebih. Katup pengontrol (
in-line PCV dan vent PCV) berfungsi mengatur
tekanan steam ke powerplant dengan stabil dan
membuang tekanan lebih dari steam ke atmosfir
secara terkontrol dengan jangkah aliran yang besar serta setenang mungkin.
Pada in-line PCV terdapat 2 PCV yang
diparalelkan, yaitu PCV 406 dan PCV 421. PCV tersebut di paralelkan karena berfungsi
untuk mengurangi pressure drop yang terjadi
pada pressure interface. Untuk jenis PCV 406
dan PCV 421 sendiri menggunakan jenis ball
valve dengan aktuator hidrolik.
Gambar 3.1 Overview Pressure Control Interface Unit II dan III
Vent valve pada gambar diatas di beri tag
dengan nama PCV 505. Pada vent valve ini
berfungsi untuk memberikan keamanan jika
terjadi trip pada turbin serta memberikan
pengendalian pressure ketika pressure pada
sistem interface berlebih maka akan dibuang
kelebihan pressure tersebut melalui vent valve
ini yang terintegrasi dengan rockmuffler.
3.2 Sistem Kontrol Valve 3.2.1 Kontrol Valve DCS PIT 427 PIT 223 Selection PIT 407A PIT 407B Selection Adaptive tune parameter Adaptive tune parameter PID PCV 406 PCV 421 PV SV E MV
Gambar 3.2 Diagram Block Kontrol Sistem
Dari gambar diatas dapat kita lihat bahwa terdapat 4 PIT yang di umpan balikkan ke dalam kontroller, yaitu PIT-407A, PIT-407B, PIT-427, dan PIT 223. Dimana PIT-407A dan
PIT-407B merupakan PIT upstream, sedangkan
PIT-427 dan PIT-223 merupakan PIT
downstream. Pada operasi 407A dan PIT-407B di dalam DCS ada 2 macam operasi sistem untuk pemilihan mana yang akan
diumpan balikkan ke dalam sistem
pengontrolan, operasi sistem ini yaitu auto dan
manual. Auto disini berguna untuk
penyeleksian PI (Pressure Indicator) manakah
yang akan digunakan untuk metode tuning
adaptive PID. Pemilihan PIT selektor ini dilakukan secara otomatis ketika salah satu kondisi terpenuhi, kondisi tersebut adalah
dipilih perolehan nilai tertinggi saat
pengukuran dan juga tidak ada sinyal „bad
quality‟ dari pressure transmitter terkait. Sebagai contoh ketika PIT-407A memiliki nilai pengukuran yang lebih besar dari PIT-407B, maka secara otomatis yang digunakan untuk metode pentunningan kontroller PID adalah PIT-407A pengukuran karena seleksi ini diambil yang memiliki hasil lebih besar atau
bisa juga ketika ada salah satu pressure
indicator yang mengirimkan sinyal „bad quality’, maka secara otomatis dipilih pressure indicator yang berjalan normal (tidak
mengirimkan sinyal „bad quality‟). Sedangkan
untuk mode manual operator dari DCS dapat langsung memilih hasil pengukuran pressure indicator manakah yang akan digunakan untuk difeedbackkan ke sistem.
Kemudian hasil dari seleksi tersebut diumpan balikkan ke kontroller yang digunakan
untuk memodified parameter PID sehingga
kontroller dapat menangani kinerja respon pada saat kondisi tertentu. Jadi pada PID function block ini digunakan untuk memperbaiki bukaan valve agar tekanan yang keluar hasil dari pengontrolan tersebut bisa mendekati set point yang ditentukan. Dapat diperoleh rumus sebagai berikut :
E = SV-PV (1)
Dimana :
SV = Set point (Barg)
PV = Nilai aktual (Barg) diperoleh dari seleksi PIT-407A dan PIT-407B
E = Deviasi SV dan PV
MV= Hasil error yang sudah di perbaiki oleh
kontroller
Hasil PID ini digunakan untuk
mengeluarkan nilai yang berupa MV (bukaan valve). Untuk metode pembukaan valve disini digunakan metode auto, dimana ada yang menjadi lead dan follow.
Gambar 3.3 Pengontrolan dalam sistem DCS
Dalam sistem DCS pada gambar diatas
terdapat 4 function block, diantaranya adalah
function block 1 adalah PID Controller,
function block 2 adalah pressure compensation,
function block 3 adalah operasi seleksi PCV
406 dan PCV 421 dan function block 4 adalah
pelinearisasian valve.
Pressure Compensation
Pada function block berikut adalah
function block yang digunakan untuk
memeperoleh nilai kompensasi k untuk
mengkompensasi choked flow, hasil dari seleksi
diatas PIT-407 di definisikan sebagai
downstream pressure dan dibandingkan dengan
PIT-427 yang didefinisikan sebagai upstream
pressure untuk memperoleh deviasi. Dari kalkulasi ini, terjadi perhitungan seperti dalam
block dibawah, untuk memperoleh performa
scale pressure controller output :
Gambar 3.5 Kompensasi
Hasil dari nilai atau kalkulasi tersebut, digunakan untuk pembukaan valve secara parallel, sehingga terbentuk multikontrol dengan ranges bukaan tiap valve sama yaitu 0%-100%.
Operasi seleksi valve
Pada function blok ini user
diperbolehkan untuk memilih 2 mode seleksi
pengoperasian valve. Mode seleksi yang
pertama adalah mode lead/follow dan yang kedua adalah mode on/off. Pada metode
lead/follow disini PCV 406 bisa menjadi lead
dan PCV 421 menjadi follow valvenya atau
sebaliknya PCV 421yang menjadi leadnya dan
PCV 406 menjadi follow valvenya. Jadi untuk
metode lead/follow respon kedua valve adalah
sebagai berikut :
Gambar 3.4 Respon Sistem Lead/Follow
Dari kurva diatas dapat diperoleh
penjelasan bahwa karakteristik diatas
pembukaan valve secara progresif dilakukan
oleh leading valve dan kemudian following
valve membuka secara linear setelah leading valve membuka secara penuh.
Untuk mode on/off disini user dapat
memilih mode manual, dimana dapat hanya
menjalankan salah satu valve dan
memberhentikan valve lainnya.
Valve Characterization
Pada function block
characterization dilakukan operasinya di dalam DCS dengan function block FUNC-VAR.
Gambar 3.6 Func Var Characterization
Pada FUNC-VAR di dalam DCS tersebut
bertujuan untuk melinierisasikan hasil
pengontrolan valve, agar kinerja valve bisa
linear dengan pembanding flow rate. Valve
yang di kontrol ini memiliki karakteristik equal
percentage, sehingga dibutuhkan pelinierisasian agar valve tersebut mampu membuka secara linear dengan pembanding
flow rate. Jadi yang di linerisasikan ini adalah MV hasil dari controller PID.
Gambar 3.7 Sebelum Characterization
Dari gambar diatas kita peroleh ketika system tidak dilinersasikan dengan fungsi diatas, maka akan terlihat bahwa ketidak
linear-an antara output pressure controller
dengan flow rate yang dihasilkan, hal ini karena
karakteristik valve yang tidak linear dengan
flow rate. Oleh karena itu dibutuhkan fungsi tersebut untuk mengkompensasi kinerja valve
seperti gambar diatas, dengan metode
pembukaan seperti di bawah ini.
Gambar 3. 8Pengontrolan valve setelah Characterization
Dengan cara kompensasi diatas,
diharapkan kinerja valve mampu linear antara
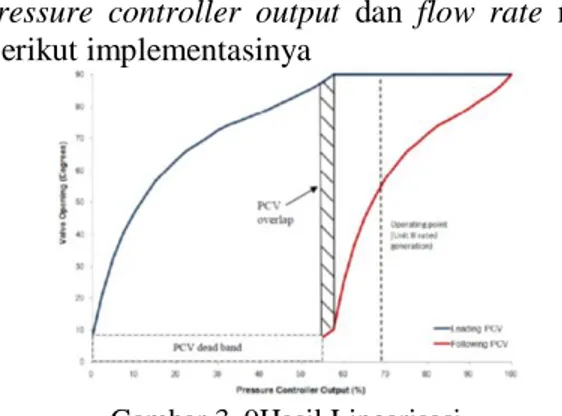
pressure controller output dan flow rate nya. Berikut implementasinya
Gambar 3. 9Hasil Linearisasi
Dari hasil pelinearsasian diatas, dapat di
ketahui bahwa untuk mengkompensasi
karakteristik valve yang memiliki karakteristik equal percentage, dapat dikompensasi dengan karakteristik quick opening. Harapannya dari
linerisasi tersebut agar pressure controller vs
flow rate dapat linear.
3.2.2 ECU 1000
Dari hasil linearisasi ini dikirimkan ke
dalam valve positioner. Valve positioner ini
berupa mikrokontroller dengan merk ECU 1000.
Fungsi utama dari ECU 1000 ini adalah untuk mengontrol posisi dari actuator hydraulic yang dimodulasi. Jadi perangkat ini digunakan
untuk mengubah besaran listrik yang
dikirimkan DCS dan diubahnya ke besaran
degree.
Gambar 3. 10 Spesifikasi ECU 1000 [10]
ECU 1000 menyediakan analaog input output serta digital input output yang salah satunya dapat digunakan untuk memodulasi
pergerakkan valve sehingga valve dapat
bergerak secara termodulasi dengan resolusi hingga 0.1%. Jadi dari gambar tersebut dapat diartikan bahwa position demand diperoleh dari DCS dengan inputan sinyal analog dengan besar 4 – 20 mA, yang kemudian di artikan oleh ECU dan ECU yang memerintahkan
proportional valve untuk bergerak dengan set – point yang telah diberikan dari DCS, sehingga
bisa bergeraklah proportional valve tersebut
sesuai dengan set point DCS. Setiap
pergerakkan proportional valve, ECU selalu
memperoleh feedback dari proportional valve
tersebut yang kemudian feedback tersebut di
berikan ke DCS sehingga user mengetahui tiap
pergerakkan dari valve. ECU 1000 juga
memberikan port khusus untuk ESD
(Emergency Stop), port ini digunakan khusus
untuk input yang berasal dari output sensor trip
turbin. Jadi ketika terjadi trip pada turbin, eksekusi dari ECU 1000 sendiri adalah segera melakukan pengiriman sinyal ke PCV 406 dan PCV 421 untuk segera menutup selama 2 sekon
serta membuka vent valve PCV 505 sehingga
pressure yang ada di dalam pipa tidak melebihi
spesifikasi dari maximum pressure pipa.
Pada ECU 1000 terdapat beberapa fungsi dasarnya, yaitu :
Positioning
Gambar 3. 11 Diagram Block Positioning Function
Gambar diatas, merupakan gambar diagram block dari fungsi posisi system di ECU 1000. Sinyal input dan status selalu termonitor dengan menggunakan elektronik dan terdapat beberapa mode posisi operasi.
Gambar 3. 12 ECU 1000 3.2.3 HPU (Hydraulic Power Unit)
Sistem didesain untuk mengoperasikan 3
buah valve yaitu 2 buah in-line valve (PCV
406, PCV 421) dan 1 buah vent valve (PCV
505) dengan tipe ball valve. Tekanan nominal
sistem hidrolik untuk beroperasi sekitar 270
barg dengan menggunakan premium grade
petroleum base hydraulic fluid. Pompa pada
Hydraulic Power Unit akan menggerakan
displacement gear pump pada kisaran 10.2 gpm pada tekanan 270 barg. Pompa dirancang untuk mengoperasikan ketiga valve pada saat kondisi nominal buka ke tutup atau sebaliknya selama 20 detik. 2 buah akumulator dengan tipe piston
5 gallon dirancang untuk dapat
mengoperasikan seluruh valve.
3.3 Cara kerja sistem DCS ECU 1000 HPU 4-20 mA S-3 ECU 1000 ECU 1000 ECU 1000 4-20 mA 270 Barg PCV 406 PCV 421 PCV 505
Gambar 3.13 Keseluruhan system
Jadi seluruh kontrol pembukaan di atur melalui DCS system, dimana yang menerjemahkan besarnya sudut bukaan valve adalah ECU 1000 atau bisa disebut positioner. Dari positioner tersebut memerintahkan pilot valve untuk membuka agar fluida pneumatic bisa masuk dan akhirnya valve tersebut mampu membuka sesuai dengan keinginan kita.
III. KESIMPULAN DAN SARAN 3.1 Kesimpulan
Pada penulisan makalah ini, didapatkan kesimpulan sebagai berikut :
1. Pengontrolan tekanan pada system interface
dipengaruhi oleh 3 actuator. Actuator
tersebut adalah PCV 406, PCV 421 (inline
valve) PCV 505 (vent valve)
2. Pada inline valve sistem perpipaan di
paralelkan dengan tujuan untuk mengurangi
pressure drop yang ada pada system kontrol
tekanan di interface.
3. Sistem pengaturan tekanan dilakukan di
dalam DCS sedangkan positioner untuk pembukaan valve digunakan controller ECU 1000 untuk pembukaan valve digunakan
aliran fluida (hidrolik) yang di supply dari
3.2 Saran
Untuk metode pengontrolan tekanan alangkah baiknya menggunakan PCV dengan
tipe butterfly valve, dikarenakan untuk metode
pengontrolan butterfly valve lebih mudah dalam
hal kelinearan pembukaan valve dengan flow
rate, dibandingkan menggunakan valve dengan
tipe ball valve.
Daftar Pustaka
[1] Black & Veatch. “Power Plant
Engineering”. New York: Chapman & Hall. 1996.
[2] Chevron. “Geothermal Production
Engineering Training”. Jakarta. 2011.
[3] Fisher. “Control Valve Handbook”.
Singapore: Emerson Process Management. 2005.
[4] Institut Teknologi Bandung. “Pelatihan
Sistem Uap Panasbumi Untuk Steamfield Operator”. Bandung. 2005.
[5] Marsudi, Djiteng. “Operasi Sistem Tenaga
Listrik”. Yogyakarta: Graha Ilmu. 2006.
[6] Metso. “Flow Control and Functional
Safety School”. 2012.
[7] Mitsubishi Heavy Industries, Ltd. “
Indonesia Darajat Geothermal Power Plant Unit III Turbine & Auxiliary Equipment Control System & Instruments”. Japan. 1997.
[8] SKM. “Darajat Unit II & III PCV
Debottlenecking Project”. Jakarta. 2012.
[9] Wardana, Komar, Ir. “Pembangkit Listrik
Panas Bumi”. Bandung. 2012.
[10] Yokogawa Indonesia. “Control-Functional
Design Specification Darajat-Unit III DCS Replacement Project”. Jakarta. 2004.