Sistem Pengendalian Manuver
Payload
(Muatan-Roket) Menggunakan
Kontroler Fuzzy
Arifudin Anwar, Rusdhianto Effendi A.K
Jurusan Teknik Elektro, FTI-ITS
Abstrak-Sistem pengendalian muatan roket merupakan suatu sistem pengendalian yang dilakukan dengan jarak jauh dan dapat memonitoring gerak sikap dari muatan roket itu sendiri. Kendali muatan roket ini sangat diperlukan untuk membuat sebuah sistem yang dapat digunakan sebagai navigasi arah yang bertujuan untuk menentukan suatu lokasi tertentu.dan untuk mengendalikannya dibutuhkan software yang berbasis sistem visual, yaitu visual basic. Tujuan dari tugas akhir ini adalah mengaplikasikan kontroler fuzzy untuk sistem muatan roket yang mampu manuver ke arah suatu lokasi tertentu dengan jarak jauh menggunakan radio frekuensi sebagai media transmisi.
Metode penelitian yang digunakan menggunakan metode eksperimen, dimana memberikan suatu parameter tertentu pada kontroler fuzzy agar dihasilkan keluaran respon yang diinginkan, yaitu agar muatan roket dapat navigasi ke target yang diinginkan.
Data yang didapat membuktikan bahwa komunikasi antara PC dan muatan roket dapat bekerja dengan jarak ± 800 meter, yaitu semua data dapat diterima maupun dikirim dengan baik. Dan pengujian navigasi muatan roket dapat mengarah kearah yang ditentukan, yaitu jika muatan roket diberi setpoint mengarah ke utara, maka muatan roket selalu mengarah ke utara..
Kesimpulan Tugas Akhir ini adalah sensor kompas dapat bekerja secara akurat, radio frekuensi YS-1020UB dapat bekerja dengan baik dan dapat menerima maupun mengirim data sejauh ± 800 meter, pengendalian dan monitoring navigasi muatan roket dapat dikendalikan dengan sotware visual basic dengan baik, dan pengendalian dengan kontroler fuzzy dapat mengarahkan muatan roket sesuai dengan setpoint yang berikan, yaitu eror steady state kecil.
Kata Kunci : muatan roket, kontroler fuzzy, navigasi
I. PENDAHULUAN
Roket merupakan salah satu wahana dirgantara yang memiliki makna startegis. Wahana ini mampu digunakan untuk melaksanakan misi perdamaian maupun pertahanan, misalnya sebagai Roket Peluncur Satelit (RPS), Roket penelitian cuaca, roket kendali, roket balistik dari : darat ke darat, darat ke udara dan udara ke udara. Dengan kata lain, roket juga bisa berfungsi sebagai peralatan untuk menjaga kedaulatan dan meningkatkan martabat bangsa, baik di darat, laut maupun di udara sampai dengan antariksa. Oleh karena itu, negara yang menguasai kemandirian teknologi peroketan dengan baik, akan disegani oleh negara- negara lain di seluruh dunia.
Perkembangan teknologi roket memerlukan pengembangan teknologi lainnya seperti komunikasi data radio, telecommand, dan sensor-sensor lainnya. Salah satu teknologi tersebut adalah pengembangan sistem pengendali muatan roket. Sistem pengendalian muatan roket merupakan suatu sistem pengendalian yang dilakukan dengan jarak jauh dan dapat memonitoring gerak sikap dari muatan roket itu sendiri.
Kendali muatan roket ini sangat diperlukan untuk membuat sebuah sistem yang dapat digunakan sebagai navigasi arah yang bertujuan untuk menentukan suatu lokasi tertentu.dan untuk mengendalikannya dibutuhkan software yang berbasis sistem visual untuk kendali manuver muatan roket . software yang digunakan adalah program visual basic 6.0. software ini digunakan untuk kontrol navigasi arah dan memonitoring posisi arah muatan roket.
Pada perkembangannya, muatan hasil rancang bangun tugas akhir ini dapat menjadi cikal bakal lahirnya satelit Indonesia hasil karya bangsa Indonesia secara mandiri.
II. KONSEP MUA TAN ROKET
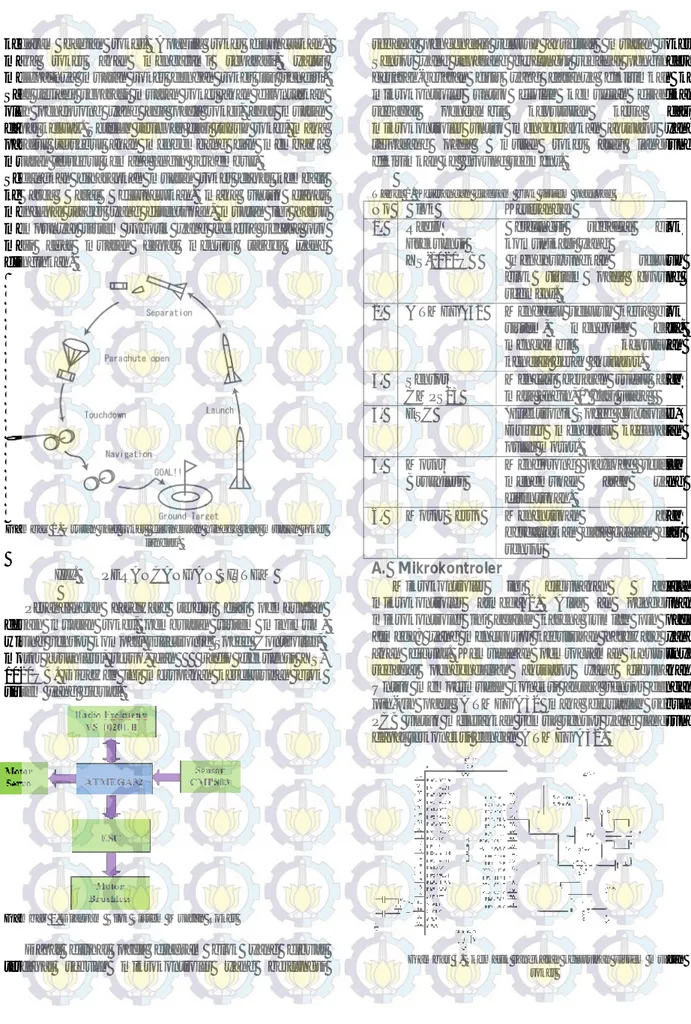
Cara kerja dari muatan roket adalah muatan ini diintegrasikan dengan parasut dan dimasukkan
kedalam bagian roket. Apabila roket diluncurkan, maka roket akan mengalami separasi, yaitu melepasnya muatan roket dengan roket itu sendiri. Saat terjadi separasi muatan roket akan dilontarkan oleh pendorong yang ada pada roket, agar muatan dapat keluar. Setelah terlepas dari tubuh roket, maka parasut tersebut akan mengembang dan membawa muatan tersebut kemana angin berhembus.
Sedangkan diharapkan muatan roket dapat kembali ke area asal diluncurkan. maka untuk dapat mencapai target yang ditentukan, muatan ini harus mempunyai sistem robotik yang bekerja secara oto masi agar muatan dapat menuju target yang diinginkan.
Gambar 1. Urutan saat roket diluncuran hingga saat muatan roket landas.
III. PERANCANGAN SISTEM
Perancangan hardware terdiri dari pembuatan desain muatan roket, pembuatan sistem minimum, wiring sensor kompas, Electronic Speed Controller, motor brushless, servo, dan radio frekuensi YS-1020UB. Dibawah ini merupakan keseluruhan blok sistem yang dibuat.
Gambar 2. Diagram Blok Sistem Muatan Roket
Dapat dilihat pada diagram blok yang dibuat terdapat sebuah mikrokontroler yang berfungsi
sebagai pengendali seluruh aktifitas muatan roket. Sensor yang tepasang berfungsi sebagai pengindera besaran-besaran fisis yang datanya dikirimkan ke mikrokontroler untuk diolah kemudian dijadikan sebagai pengambil keputusan kerja dari mikrokontroler untuk menggerakkan aktuator yang terpasang pada mutan roket atau langsung dikirimkan ke ground segment.
T abel 1. Keterangan diagram blok sistem payload No Blok Keterangan 1. Radio
Frekuensi YS-1020UB
Berfungsi sebagai blok komunikasi yang
menghubungkan seluruh blok sistem pada ground segment.
2. A TMEGA32 Mengatur seluruh kerja blok sistem, mengolah data, mengambil keputusan kendali gerak aktuator. 3. Sensor
CMPS03
Mencari besaran sudut arah mata angin, 0° dari utara 4. ESC (Elektronik Speed controller)
Driver mengatur kecepatan putar motor.
5. Motor Brushless
Mendorong payload setelah menemukan arah yang ditentukan.
6. Motor Servo Menentukan arah berdasarkan data bacaan dari sensor
A.
Mikrokontroler
Mikrokontroler ini digunakan adalah mikrokontroler atmega32. Alas an penggunan mikrokontroler ini adalah karena jumlah pin pada atmega8 yang mencukupi kebutuhan hardware yang akan dibuat. Kemudahan pemrograman khususnya sebagai pengendalian aktuator yang digunakan. Untuk mempermudah koneksi antara sensor dengan pin-pin pada A TMEGA32 maka dibuatlah sebuah PCB untuk meletakkan semua sensor yang langsung dapat terkoneksi dengan A TMEGA32.
Gambar 3. Skematik rangkaian keluruhan sistem m uatan roket
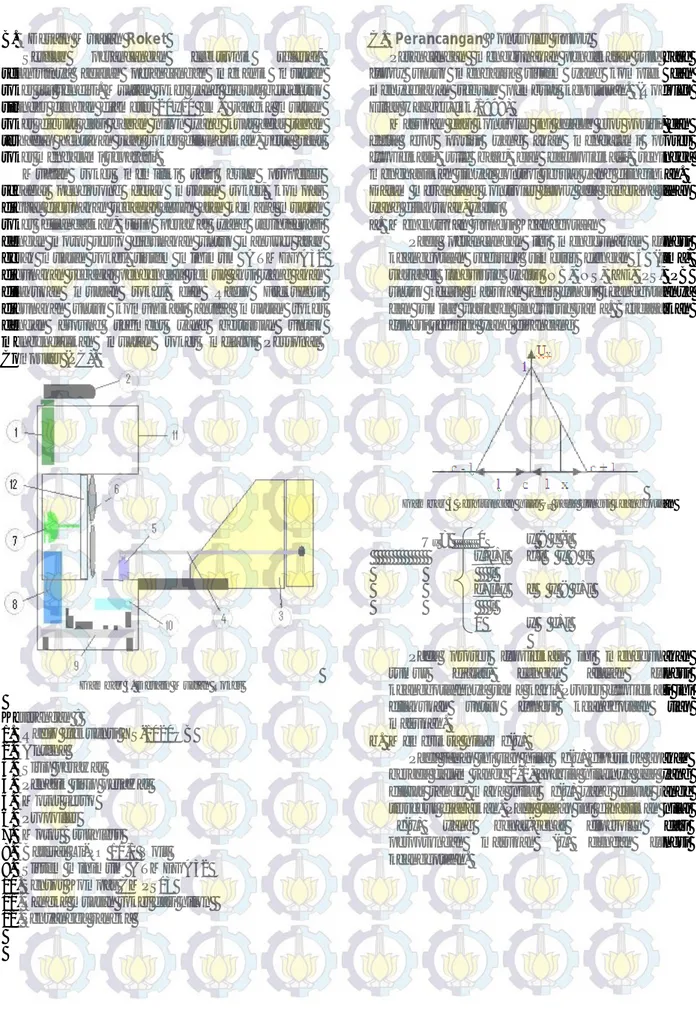
B. Desain Muatan
Roket
Setelah perancangan elektronik selesai, selanjutnya adalah perancangan mekanik muatan roket itu sendiri. Muatan roket yang dibuat berbentuk silinder dengan diameter 20x10 cm. rangka muatan roket dibuat dari bahan nilon yang kuat agar tahan terhadap hentakan saat roket diluncurkan, serta saat roket mengalami separasi.
Muatan roket memiliki satu buah propeller sebagai pendorong gerak muatan roket, kompas digital digunakan sebagai acuan arah kemana muatan roket dilandaskan, sirip pesawat yang terintegrasi dengan motor servo digunakan untuk manuver arah gerak muatan roket, sistem minimum A TMEGA32 digunakan sebagai pengendali semua aksi yang akan dilakukan muatan roket, dan Radio Frekuensi digunakan untuk komunikasi antara muatan roket dengan ground segment yang bertujuan untuk mengendalikan muatan roket melalui Personal Computer (PC).
Gambar 4. Desain Muatan Roket
Keterangan :
1. Radio frekuensi YS-1020UB 2. Antena
3. Sirip pesawat 4. Penarik sirip pesawat 5. Motor servo
6. Propoller 7. Motor Brushless 8. Baterai Li-PO 11,1 V olt 9. Sistem minimum A TMEGA32 10. Sensor Kompas CMPS03 11. Rangka muatan roket dari nilon 12. Penyangga rangka
C.
Perancangan
Kontroler FuzzyPerancangan menggunakan pendekatan rule base fuzzy untuk mengalisa sistem yang komplek dan menyediakan sebuah pembuat keputusan. (Rodolfo Elias Habber,dkk,1998)
Masukan dari kontroler ini adalah eror posisi, dan delta eror posisi yang akan mengalami proses fuzzifikasi, rule base, dan defuzzifikasi, sehingga menghasilkan sinyal control sesuai yang diinginkan. Dalam merancang kontroler fuzzy ada beberapa tahap yang dilakukan, yaitu
a. Menentukan Fungsi Keanggotaan
Pada perancangan ini menggunakan fungsi keanggotaan segitiga simetris dengan 5 (lima) variabel linguistic yaitu NB, NS, ZE, PS, PB untuk kedua masukan jenis fungsi keanggotaanya dan jumlah variabel linguistic sama. Berdasarkan fungsi segitiga yang dirancang
Gambar 5 Perhitungan nilai Ux pada fungsi keanggotaan
Ux = 0 x < c -l x-c+l c-l ≤ x < c l c+l-x c ≤ x < c+l l 0 x ≥ c+l
Pada proses fuzzifikasi ini menggunakan rumus diatas, dengan alasan fungsi keanggotaannya sama kaki. Proses fuzzifikasi ini dilakukan untuk fungsi keanggotaan tiap masukan.
b. Memeriksa nilai e(x)
Pada tahap ini tiap nilai e(x) diperiksa apakah berada dalam range 0-1, apabila nilainya ada yang diluar range, maka nilai e(x) yang diluar range tersebut diabaikan. Pada tahap ini dihasilkan nilai e(x) yang benar-benar diperoleh dari perpotongan masukan (x) dengan fungsi keanggotaan.
Gambar 6 Fungsi keanggotaan
Untuk mengetahui nilai µe(x) , maka dibuat flowchart agar dapat mengetahui nilai dari µe(x). abel
Gambar 7 Flowchart untuk mengetahui nilai eror
c. Rule Base Mac-Vicar Whelan
Untuk mendapatkan aksi kontrol diperlukan aturan dasar rule dimana rule yang digunakan sebagai pedoman dalam pembuatan inference rule.
T abel 2. Rule base menentukan sudut motor servo
T abel 3. Rule base menentukan kecepatan motor brushless
d. Defuzzifikasi
Defuzzifikasi ini merupakan tahap akhir, dimana pada tahap ini akan didapatkan nilai sinyal control yang akan dikirimkan ke plant. Metode yang digunakan adalah Metode Sugeno. Aksi kontrolnya adalah sebagai berikut:
.
Setelah tahap ini, sinyal control akan dikalikan dengan gain yang kemudian dikirimkan ke plant. Dalam menentukan jenis, batas fungsi keanggotaan dan gain yang digunakan dalam Tugas Akhir ini adalah dengan metode eksperimen. Langkah-langkah dalam metode eksperimen yaitu dengan memberi masukan regulator (step posisi) pada plant. Jika respon keluaran belum sesuai target yang diharapkan , maka batas fungsi keanggotaan diubah-ubah hingga didapatkan respon keluaran yang memiliki setting time yang kecil dan overshoot yang paling minimum, tetapi masih memiliki eror steady state. Untuk menghilangkan eror steady state digunakan gain, nilai gain sendiri didapatkan dari hasil percobaan dengan mengubah gain berulang kali hingga didapatkan respon keluaran plant dengan eror steady state yang paling minimum.
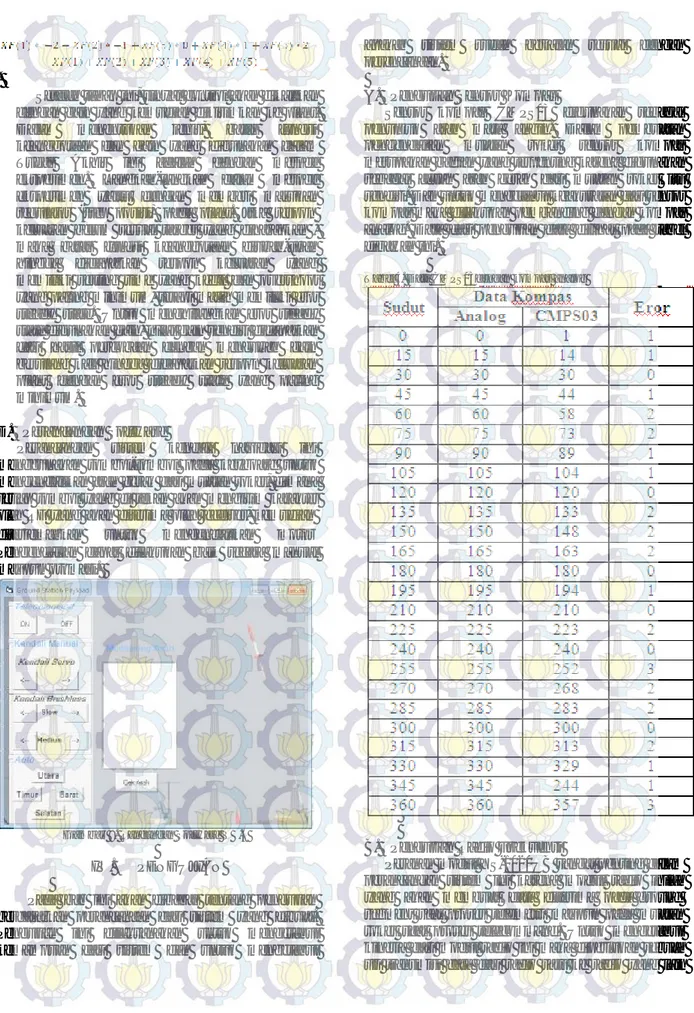
D. Perancangan Software
Perancangan sistem kendali navigasi ini menggunakan tombol-tombol pada keyboard untuk mengendalikan arah gerak dari muatan roket, dimana setiap tombol yang di tekan akan mengirim karakter oleh RF yang akan diterima oleh receiver, kemudian diterjemahkan untuk mengendalikan motor
.
Pengendalian dapat dilakukan baik secara manual maupun otomasi.Gambar 8. Rancangan Software VB.6
IV . PENGUJIAN
Pada bab ini akan dibahas tentang pengujian berdasarkan perancanaan dari sistem yang dibuat. Pengujian ini dilaksanakan untuk mengetahui kemampuan dari sistem dan untuk mengetahui
apakah sistem sudah berjalan sesuai dengan perencanaan.
A. Pengujian Sensor Kompas
Sensor kompas CMPS03 digunakan sebagai penunjuk arah mata angin. Dalam pembuatan pengendalian muatan roket sensor kompas merupakan bagian yang terpenting karena digunakan sebagai acuan arah gerak dari muatan roket itu sendiri. Dan untuk mengetahui keakuratan dari sensor kompas maka dilakukan pembanding dengan kompas analog. Data dari pengujian data dilihat pada tabel dibawah ini.
T abel 4. Data CMPS03dengan kompas analog
B. Pengujian Radio Frekuensi
Peranan modul YS-1020UB sangat penting dalam perancangan sistem ini karena modul radio inilah yang akan membuat data diterima pada ground segment saat proses telemetri maupun pada muatan roket saat proses telecommand. Untuk mengetahui kinerja dari modul radio ini maka diperlukan sebuah uji transmisi data dari radio satu ke radio yang lain
dengan cara mengirimkan data dari jarak terdekat sampai jarak terjauh dari jangkauan frekuensi radio. Pada modul radio telah dilengkapi dengan sebuah software visual basic yang mampu mengirimkan data maupun menerima data antar radio, selain itu radio harus mampu berkomunikasi dengan mikrokontroler.
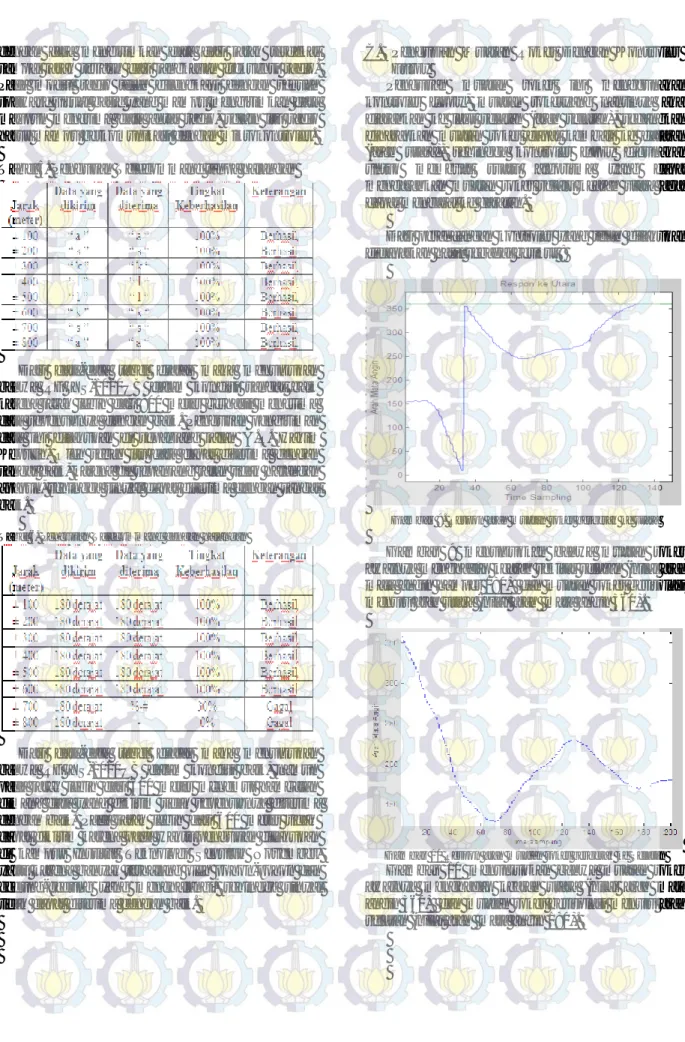
T abel 5. Pengujian T elecommand tanpa halangan
Dari data-data tabel diatas maka menunjukan bahwa RF YS-1020UB dalam kondisi sangat baik karena jarak lebih dari 800 meter berhasil menerima data sepenuhnya dengan baik. Pengujian pengiriman data ini dilakukan di sepanjang jalan A.R. Hakim Keputih. Oleh sebab itu data dapat diterima dengan sangat baik, karena de sepanjang jalan tidak halangan apapun, sehingga sinyal dapat diterima dengan sangat baik.
T abel 6. Pengujian T elecommand dengan halangan
Dari data-data tabel diatas maka menunjukan bahwa RF YS-1020UB dalam kondisi baik, namun pada jarak lebih dari 600 meter menemui hambatan dimana data yang dikirim tidak sepenuhnya diterima denganbaik. Pada jarak lebih dari 600 meter tidak dapat dikirim karena pada waktu pengujian dilakukan di kampus Institut Teknologi Sepuluh November, yaitu karena banyak terhalang oleh pohon-pohon dan gedung-gedung yang menghalangi, sehingga sinyal tidak dapat diterima dengan baik.
C. Pengujian Muatan Roket Dengan Kontroler Fuzzy
Pengujian muatan roket ini menggunakan kontroler fuzzy , muatan roketyang nantinya akan diarahkan ke laut selatan (arah selatan), sedangkan diharapkan muatan roket dapat kembali ke dataran (arah utara), sehingga kontroler fuzzy digunakan untuk membuat suatu algoritma yang dapat mengarahkan muatan roket selalu kearah utara agar dapat mendarat ke daratan.
Dari perancangan kontroler yang telah dilakukan didapatkan hasil sebagai berikut :
Gambar 9. Respon arah muatan roket bergerak ke utara
Gambar 9 menunjukkan bahwa muatan roket awalnya menghadap kearah sekitar selatan (nilai arah mata angin hamper 180) dan muatan roket berisolasi menuju arah utara (nilai arah mata angin 360).
Gambar 10 Respon arah m uatan roket bergerak ke Selatan
Gambar 10 menunjukkan bahwa muatan roket awalnya menghadap kearah utara (nilai arah mata angin 360) dan muatan roket berisolasi menuju arah selatan (nilai arah mata angin 180).
Gambar 11 Respon arah muatan roket bergerak ke Barat
Gambar 11 menunjukkan bahwa muatan roket awalnya menghadap kearah selatan (nilai arah mata angin 180) dan muatan roket bergerak menuju arah Barat (nilai arah mata angin 270).
Gambar 12 Respon arah m uatan roket bergerak ke Timur
Gambar 12 menunjukkan bahwa muatan roket awalnya menghadap kearah barat (nilai arah mata angin 270) dan muatan roket bergerak menuju arah Timur (nilai arah mata angin 90).
V . KESIMPULAN
Berdasarkan pengujian dari penerimaan data dari software visual basic yang telah dirancang, maka dapat diperoleh beberapa kesimpulan:
1. Sensor kompas CMPS03 dapat bekerja secara akurat.
2. Radio frekuensi YS-1020UB bekerja dengan baik, dan dapat menerima dan mengirim data ± 800 meter.
3. Pengendalian navigasi muatan yang dikendalikan dengan software visual basic dapat bekerja dengan baik.
4. Pengendalian dengan kontroler fuzzy dapat mengarahkan muatan roket sesuai dengan set point yang diberikan dan respon yang dihasilkan mempnyai Steady State.
VI. DAFTAR PUSTAKA
[1] Jamshidi, Mohammad, Nader V adiee, Timothy J. Ross. 1993.
Fuzzy Logic and Control. America :Prentice-Hall Internasional, inc
[2] Hendry . 2009. Berbagai Aplikasi Database Dengan Visual Basic 6.0. Jakarta : Elexmedia Komputindo.
[3] Nugroho, Bunafit. 2008. Aplikasi Multimedia Dengan V isual Basic 6.0. Jakarta : Elexmedia Komputindo
[4] Sadeli, Muhammad. 2008. Aplikasi Database Visual Basic 6.0 untuk Orang A wam. Palembang : Maxikom
[5] Ariyus, Doni dkk. 2009. Komunikasi Data. Y ogyakarta : Andipublisher
[6] Arhami, muhammad, 2005. “Konsep Dasar Sistem Pakar”. Andi Y ogyakarta
[7] LAP AN, (2010), Buku Panduan Perlombaan KOMURINDO 201 1. Jakarta: Derektorat Jendral Pendidikan Tinggi. [8] Kuhnel, Claus. 2001. BASCOM Programming of
Microcontrollers with Easy.USA: Universal Publishers [9] http://www . Sentrasensor .com
[10] http://education.web.id
VII. RIW AYA T PENULIS
Arifudin Anwar, dilahirkan di Jepara pada tanggal 19 Juli 1987 dari pasangan Sarwo Widhiatmoko dan Munawaroh sebagai anak pertama dan terakhir. Menyelesaikan studi program Diploma-3 di Universitas Negeri Semarang pada tahun 2008, dengan judul makalah “Perancangan Decrail-3 Sebagai Antisipasi T abrakan Antar Kereta Api”. Dan tahun 2009 melanjutkan studi di Institut Teknologi Sepuluh Nopember melalui program Lintas Jalur dan mendalami ilmu Teknik Sistem Pengaturan.