Perancangan dan Implementasi Perangkat Lunak Visualisasi
Model Sepeda
Mohamad Dani
1)1) Program Studi Teknik Komputer Politeknik Telkom, Bandung 40257, email: [email protected]
Abstrak – Makalah ini akan membahas perangkat
lunak yang dirancang untuk mensimulasikan gerakan-gerakan sepeda virtual dalam bentuk visual berdasarkan model dinamika sepeda dengan data-data masukan berupa torsi, sudut setang dan rem yang diperoleh dari penekanan tombol keyboard Perangkat lunak ini dibuat dengan menggunakan pustaka-pustaka yang bersifat gratis untuk mengolah dinamika sepeda virtual dan memvisualisasikannya dalam bentuk gerakan sepeda virtual pada lingkungan virtual yang ditampilkan ke layar monitor PC, notebook atau proyektor multimedia. Setelah perangkat lunak ini diuji dengan penekanan tombol keyboard untuk mensimulasikan pengayuhan, pembelokan dan pengereman sepeda untuk lingkungan virtual yang berbeda-beda, menunjukkan hasil yang cukup memuaskan yaitu perubahan posisi, kecepatan, rem dan sudut setang sepeda virtual di lingkungan virtual serta tampilan yang cukup baik dan cukup realistis pada kondisi jalan datar, menurun dan menanjak.
Kata Kunci: torsi, sudut setang, rem, model dinamika sepeda, keyboard, lingkungan virtual.
1. PENDAHULUAN
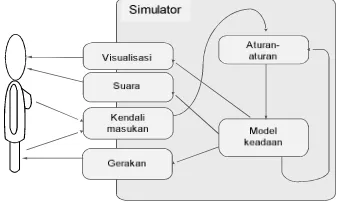
Dewasa ini simulator kendaraan seperti simulator pesawat terbang, helikopter, kereta api, tank atau mobil sudah dijual bebas di pasaran. Biasanya komponen-komponen alat kendali untuk simulator tersebut menyerupai atau meniru komponen dari kendaraan yang akan disimulasikan. Masukan-masukan dari simulator kendaraan tersebut diperoleh dari pengguna yang kemudian diumpankan ke perangkat keras simulator tersebut yang kemudian akan diambil oleh perangkat lunak simulator untuk menghitung model simulasi dari kendaraan tersebut dan lingkungannya. Perangkat lunak simulator ini menghitung keadaan model terbaru yang tergantung kepada tindakan pengguna misal menekan gas, belok kiri, belok kanan, mengerem dan lain-lain; keadaan kendaraan virtual terhadap lingkungan virtual; aturan-aturan simulasi yang dibuat oleh pengembang simulator kendaraan tersebut dan lain-lain. Akibat dari hal-hal tersebut akan mengakibatkan perubahan pada simulator kendaraan tersebut, perubahan visualisasi pada tampilan kendaraan virtual dan lingkungan virtual, suara, getar misal bertabrakan dengan dinding atau kendaraan lain di lingkungan virtual dan lain-lain.
Pengguna simulator kendaraan ini akan menginterpretasikan akibat yang ditimbulkan oleh simulator kendaraan tersebut dan merespon berdasarkan akibat-akibat tersebut. Penjelasan-penjelasan tersebut dapat digambarkan sebagai berikut:
Gambar 1: Arsitektur dari sebuah simulator kendaraan
Visualisasi merupakan bagian dari sebuah simulator yang pada kenyataannya dapat direalisasikan dengan memproyeksikan citra hasil pengolahan perangkat lunak simulator ke sebuah layar yang mengelilingi sebuah mock-up kendaraan. Simulator yang lebih maju dapat menggerakkan dan memutarkan kendaraan, sebagai contoh Stewart platform.
Simulator kendaraan harus dapat berinteraksi terhadap masukan pemakai dan meresponnya secara cepat. Penggunaan simulator kendaraan didasari oleh tiga alasan utama yaitu:
1. biaya
penggunaan simulator kendaraan lebih murah dibandingkan dengan penggunaan kendaraan yang sebenarnya karena pada simulator ini tidak dibutuhkan biaya untuk bahan bakar dan perawatan khususnya untuk kendaraan yang rumit seperti pesawat terbang.
2. keamanan
keadaan bahaya yang diperlukan untuk melatih pengendara dan instruktur dapat menyebabkan mereka berada dalam bahaya besar. Dengan adanya simulator, pengguna merasa aman walaupun kondisi lingkungan virtual berbahaya. 3. pembelajaran
sebenarnya.
Simulator sepeda merupakan salah satu simulator kendaraan yang cukup menarik dan agak berbeda dengan adalah simulator kendaraan yang lain. Secara garis besar simulator sepeda ini mensimulasikan kondisi-kondisi sepeda di dunia virtual berdasarkan informasi-informasi dari luar seperti torsi, sudut belok dan rem yang ditampilkan ke layar monitor PC/Notebook atau sejenisnya dengan posisi awal dan akhir sepeda virtual tersebut sudah ditentukan oleh simulator yang dibuat. Informasi-informasi dari luar tersebut dapat berasal dari sensor, keyboard dan lain-lain. Sebagai informasi, simulator sepeda ini telah dikembangkan oleh beberapa perguruan tinggi antara KAIST, Universitas Shanghai Jiao Tong[2] dll.
Dari bermacam-macam simulator sepeda terutama di bagian visualisasinya kebanyakan menggunakan perangkat lunak yang berbayar terutama untuk membuat lingkungan virtual seperti kota dll. sehingga biaya yang dikeluarkan untuk membuat perangkat lunak visualisasi untuk simulator sepeda ini cukup besar. Untuk mengatasi hal tersebut, penelitian ini memfokuskan pada penggunaan perangkat lunak open source dan gratis untuk bagian render, physic engine serta pembuatan lingkungan virtualnya.
Keunggulan teknologi game dan media digital memungkinkan perancangan perangkat lunak visualisasi sepeda yang mampu menghadirkan tampilan di layar monitor PC/Notebook atau layar lebar yang cukup realistis.
2. MODEL DINAMIKA SEPEDA
Dinamika sepeda menjelaskan bagaimana sebuah sepeda bereaksi terhadap gaya yang dimasukkan kepada sepeda tersebut.
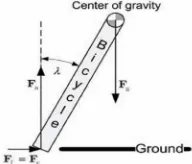
2.1. Model dan Persamaan Kinematika Sepeda Anggaplah sepeda sebagai sebuah badan tegar tunggal[2],[3] sehingga analisis model matematis sepeda tersebut akan lebih sederhana. Gaya-gaya yang ada pada saat membelok, Fg yaitu gaya gravitasi yang
mengarah ke bawah yang tergantung kepada massa sepeda, m dan vektor gravitasi, g. Gaya-gaya ini ditunjukkan pada berikut:
.
Gambar 2: Gaya-gaya yang ada pada saat sepeda membelok
Tanah menghasilkan gaya reaksi, Fn ke sepeda yang
arahnya ke atas dan besarnya sama dengan gaya Fg.
Sebagai tambahan, tidak ada gaya gesekan, Ff yang
arahnya jauh dari pusat belokan. Jika sepeda tegak lurus sepenuhnya, berarti λ = 0 , makaFf= 0. Untuk menjaga
sepeda mengikuti lintasan sirkular belokan, gaya sentripetal, Fcharus dimasukkan dan arahnya menuju
pusat belokan yang besarnya tergantung terhadap radius kurva, r; massa sepeda, m serta kecepatan sepeda, v.
(1) Gaya gesekan yang ada ini menghasilkan gaya sentripetal yang diperlukan, jadi Fc= Ff. Gaya Fndan Ff
ini menghasilkan torsi pada sepeda dengan besar masing-masing, τn dan τf:
(2) Berdasarkan kepada sistem sepeda dan pengendara secara keseluruhan, persamaan Newton memberikan:
(3)
Gaya-gaya luar disebelah kanan dari persamaan (3) dibagi menjadi tiga bagian utama,
1. gaya gravitasi 2. gaya resistansi udara
Pada kecepatan rendah, resistansi udara sangat rendah sehingga dapat diabaikan. Pada kecepatan tinggi, resistansi udara meningkat dengan cepat dan menjadi faktor luar yang utama. Jika drag friction coefficient [1] dihilangkan, resistansi udaranya menjadi:
(4) dengan
CD= drag coefficient,
Ar = luas frontal sistem sepeda-pengendara (m2), = Rapat udara (Kg/m3),
v = kecepatan udara terhadap sepeda (m/detik)
3. gaya rolling resistance
Rolling resistance adalah gaya yang bertindak sebagai gaya lawan yang berdasarkan kepada rolling resistance dari ban-ban sepeda. Nilai Rolling resistance proporsional terhadap gaya gravitasi yang tegak lurus terhadap lintasan pengendara dan rolling coefficient dari ban-ban, CRoll. Gaya rolling resistance
ini ditunjukkan pada persamaan berikut:
3. PERANCANGAN PERANGKAT LUNAK VISUALISASI MODEL SEPEDA
3.1. Tujuan Penelitian
Pada umumnya sepeda digunakan sebagai alat transportasi, pengangkut barang-barang dan sarana latihan. Sebagai sarana latihan, sepeda merupakan pilihan yang baik untuk meningkatkan kebugaran tubuh orang yang melakukan latihan tersebut. Kendala-kendala yang dihadapi dalam melakukan olah raga bersepeda khususnya di negara-negara dengan iklim yang ekstrim misalnya selalu hujan, panas yang sangat terik, salju dan lain-lain sehingga olah raga bersepeda ini tidak dilakukan setiap saat yang berakibat sedikit orang untuk melakukan olah raga ini.
Tujuan yang ingin dicapai dalam penelitian ini yaitu merancang dan mengimplementasikan perangkat lunak visualisasi untuk simulator sepeda yang dapat digunakan di rumah, pusat latihan atau pusat kebugaran yang menawarkan pengalaman visual dalam olah raga bersepeda seperti mengendarai sepeda yang sebenarnya sehingga latihan bersepeda menggunakan simulator sepeda yang ada perangkat lunak visualisasi ini akan paling tidak dua hal yang didapat yaitu kesenangan dan kebugaran.
3.2. Persyaratan Sistem
Agar perangkat lunak visualisasi model dinamika sepeda ini sesuai dengan yang dikehendaki, maka diperlukan beberapa persyaratan yang harus dipenuhi yaitu:
1. pergerakan sepeda dapat ditiru di lingkungan virtual,
2. perubahan lingkungan virtual mengikuti pergerakan sepeda secara dinamis,
3. pengubahan lingkungan virtual dan penambahan obyek seperti rumah, gedung dan lain-lain dapat dilakukan sesuai dengan keinginan pengguna, 4. mode-mode yang digunakan pada sistem ini yaitu
mode keyboard yaitu mode yang menerima masukan dari penekanan keyboard dan mode port serial yaitu mode yang menerima data dari port serial,
5. adanya modul komunikasi yang mampu berkomunikasi dengan sistem akuisisi data melalui RS232 untuk menerima besaran sensor sepeda (torsi motor, torsi rem, kecepatan dan sudut setang ban/roda sepeda) untuk keperluan dinamika sepeda bila menggunakan mode port serial.
3.3. Desain Sistem
Desain sistem ini merupakan desain yang didasarkan kepada analisis dari model matematis kinematika dan dinamika sepeda serta spesifikasi sistem sebagaimana
yang telah dijelaskan sebelumnya serta modifikasi dari desain simulator mobil[4]. Diagram blok - diagram blok dari desain sistem simulator sepeda secara keseluruhan
disajikan pada gambar berikut:
Gambar 3: Diagram blok simulator sepeda
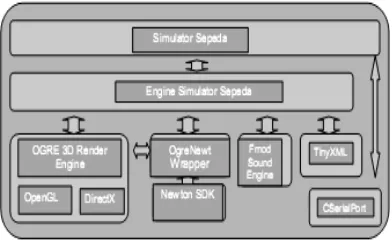
Gambar 4: Arsitektur perangkat lunak visualisasi model dinamik sepeda
Gambar 6: UML deployment diagram perangkat keras dan lunak komputer
Gambar 7: Diagram kelas perangkat lunak visualisasi untuk sepeda
Informasi kelas-kelas yang terdapat pada aplikasi visualisasi untuk simulator sepeda ini yaitu:
1. ActorController, kelas yang menangani pergerakan kendaraan secara otomatis.
2. CameraController, kelas yang menangani pengaturan kamera.
3. IAVehicleController, kelas yang menangani logika pergerakan kendaraan.
4. MySceneController, kelas yang menangani menu pada simulator visual.
5. MySceneListener, kelas yang menangani pendeteksian perubahan posisi kamera dan perubahan lingkungan virtual.
6. PlayerVehicleController, kelas yang menangani pembacaan data-data sensor dari sepeda dan memberikan torsi kepada ban sepeda di lingkungan virtual.
7. VehicleController, kelas yang menangani pengaturan sepeda di lingkungan virtual. 8. GameEngineTestMain, kelas utama yang
memanggil kelas-kelas yang lain untuk menjalankan simulator visual ini.
Perangkat lunak ini dibuat dengan menggunakan Microsoft Visual C++ 2003, Ogre3D[5], Newton SDK. Tampilan dari perangkat lunak visualisasi model sepeda ditunjukkan pada gambar 8 dan 9:
Gambar 8: Tampilan awal program saat dijalankan
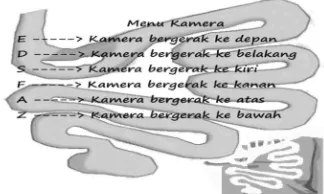
Gambar 9: Menu kamera program visualisasi model sepeda
4. HASIL PENGUJIAN
Pengujian ini bertujuan untuk menguji kinerja perangkat lunak visualisasi model sepeda apakah sesuai dengan spesifikasi yang telah ditentukan atau tidak. Platform perangkat keras yang digunakan untuk pengujian perangkat lunak visualisasi ini berupa Notebook Acer tipe Aspire 4520 dengan spesifikasi sebagai berikut:
1. CPU : AMD Turion64 X2 TL-58, 1,9GHz dual core,
2. RAM: 1,5 GB (shared),
3. Video Card: NVIDIA GeForce 7100M yang kompatibel dengan OpenGL dan DirectX 9.0c, 4. VRAM: 64MB dari Memori Kartu VGA, 5. Sound Card: Realtek High Definition Audio
yang kompatibel dengan DirectSound, 6. OpenGL 2.1dan DirectX 9.0c,
7. Ruang kosong di harddisk sekitar 100MB untuk file-file binari dan 600MB untuk file-file source code dan pendukungnya,
8. Keyboard dan mouse,
9. Tampilan berupa layar monitor bawaan Notebook dan proyektor multimedia dengan resolusi layar minimal 1024 x 768 piksel dengan kedalaman warna minimal 16 bit.
4.1 Pengujian Parameter Fisik Sepeda di Simulator Visual
Gambar 10: Diagram blok pengujian pergerakan sepeda di
lingkungan virtual
Pengujian ini menggunakan skenario-skenario sebagai berikut:
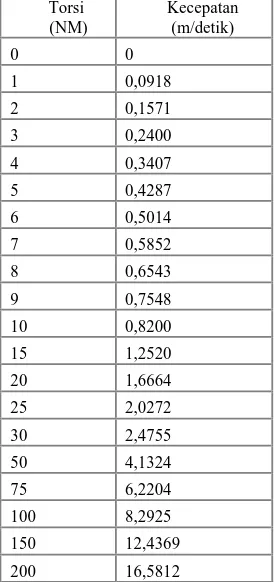
Skenario 1: Pengujian pengukuran kecepatan sepeda di dunia virtual dengan pemberian torsi tertentu yang diperoleh dari penekanan keyboard dan diberikan ke ban sepeda pada kondisi jalan datar
Tabel 1. Perubahan Nilai Kecepatan Sepeda Terhadap Nilai Torsi
Torsi (NM)
Kecepatan (m/detik)
0 0
1 0,0918
2 0,1571
3 0,2400
4 0,3407
5 0,4287
6 0,5014
7 0,5852
8 0,6543
9 0,7548
10 0,8200
15 1,2520
20 1,6664
25 2,0272
30 2,4755
50 4,1324
75 6,2204
100 8,2925
150 12,4369
200 16,5812
Skenario 2: Pengujian pengukuran kecepatan sepeda di dunia virtual tanpa pemberian torsi ke ban sepeda pada kondisi jalan menurun dan sudut kemiringan jalan virtual bervariasi
Tabel 2. Perubahan Nilai Torsi Sepeda Pada Saat Sepeda Menurun
Waktu (detik)
Kecepatan (m/detik)
0 0,12
1 0,19
2 0,18
3 0,29
4 0,77
5 1,42
6 2,08
7 3,70
8 3,80
9 4,44
10 4,54
Skenario 3: Pengujian kecepatan sepeda dan torsi yang diberikan pada kondisi jalan menanjak dan hasilnya adalah sebagai berikut:
Gambar 10: Kecepatan awal sepeda pada saat diam
Gambar 11: Kenaikan Kecepatan pada saat Sepeda diberi torsi tambahan
Dari gambar 10 dan 11 didapat bahwa perangkat lunak ini telah bekerja dengan baik pada saat sepeda virtual di jalan menanjak di lingkungan virtual tersebut karena agar sepeda dapat maju harus diberi torsi yang sesuai.
Skenario 4: Pengujian sudut setang sepeda
Gambar 12: Posisi setang sepeda pada sudut 0o (ditengah-tengah)
Gambar 13: Posisi setang sepeda pada sudut 30oke kiri dari
arah kamera
Gambar 14: Posisi setang sepeda pada sudut 30o ke kanan dari arah kamera
Dari gambar-gambar 12 sampai 14 didapat bahwa rutin pengubahan sudut setang pada perangkat lunak ini sesuai dengan yang diharapkan.
Skenario 5: Pengujian Pengereman Sepeda Virtual Untuk melakukan pengujian rem sepeda dilakukan dengan penekanan tombol spasi dan bersifat on-off dan hasilnya adalah sebagai berikut
Gambar 15: Kecepatan sepeda tanpa direm
Gambar 16: Kecepatan sepeda pada saat direm penuh.
Dari gambar 15 dan 16 didapat bahwa rutin
pengereman sepeda di perangkat lunak ini sesuai dengan yang diharapkan.
4.2 Pengujian Parameter Fisik Sepeda di Simulator Visual
Pengujian lingkungan virtual ini bertujuan untuk mengukur kinerja dari simulator visual untuk berbagai macam 3D engine dengan parameter-parameter yang diukur adalah FPS dan jumlah segitiga.
Tabel 3. Kinerja Komputer dalam melakukan Visualisasi Lingkungan
Nama lingkungan
3D Engine
OpenGL DirectX 9.0c
FPS Jumlah
segitiga
FPS Jumlah
segitiga Lintasan
balap sepeda
50 20550 67 20550
Gurun pasir 24 29924 33 29924
Berdasarkan tabel 3 menunjukkan bahwa kinerja komputer dalam melakukan visualisasi simulator sepeda ini cukup baik ini karena sudah memenuhi persyaratan FPS untuk lingkungan virtual yang berbeda sebagaimana yang telah dipersyaratkan.
5. KESIMPULAN
Dari hasil penelitian dan pengujian yang dilakukan terhadap perangkat lunak visualisasi model dinamika sepeda, dapat ditarik kesimpulan sebagai berikut: 1. hasil-hasil pengujian perangkat lunak visualisasi
yang dilakukan mendekatu dengan spesifikasi dan persyaratan sistem visual yang harus dipenuhi.
2. mesin-mesin dan pustaka yang dipilih untuk membangun prototipe sistem mampu melaksanakan fungsinya dengan baik.
3. prototipe perangkat lunak visualisasi untuk simulator sepeda yang dibangun ini mampu melakukan interaksi antara komputer yang dipasang perangkat lunak visualisasi model sepeda dengan manusia yang dibekali dengan keyboard sebagai antarmuka pemakai dengan waktu respon dan pengolahan yang cepat, sehingga tampilan pada layar monitor PC, notebook atau layar lebar cukup baik dari segi kenyamanan penglihatan dan perubahan keadaan lingkungan virtual.
DAFTAR REFERENSI
[1] Chung, Eric et. al., ”From Vision to Prototype -Virtual Road Racing, Master Theses”, Institutionen for Systemteknik Lingkoping Universitet, Lingkoping, 2005.
Bicycle Simulator”, Department of Mechanical Engineering and Department of Computer Science of KAIST, Daejeon, 2002.
[3] Yin, Song ,”Study on virtual force sensing and force display device for interactive bicycle simulator”, ScienceDirect, USA, 2007.
[4] Proyek Crazy Cars, dapat diakses secara online di http://sourceforge.net/projects/crazycars. [5] P r o ye k Ogre3D, dapat diakses secara online di