SISTEM PENENTUAN POSISI AKUSTIK BAWAH LAUT
MAKALAH GEODESI KELAUTAN
Makalah tentang salah satu topik pembahasan yang dipelajari dalam Geodesi Kelautan
pada Program Studi Teknik Geodesi dan Geomatika
Oleh
Ramadhan Hidayaturrahman 15110094
PROGRAM STUDI TEKNIK GEODESI DAN GEOMATIKA FAKULTAS ILMU DAN TEKNOLOGI KEBUMIAN
1
Bab 1
Pendahuluan
Sistem penentuan posisi telah lama ditemukan dan dikembangkan. Dimulai dari
perkembangan sistem penentuan posisi menggunakan Global Positioning System
(GPS) lalu muncul berbagai sistem penentuan posisi lainnya seperti GLONASS,
GALILEO, COMPASS, dan lain-lain. Sistem penentuan posisi tersebut
memanfaatkan gelombang elektromagnetik yang dipancarkan dari satelit ke receiver
yang ada di permukaan bumi. Penentuan posisi menggunakan satelit sangat
membantu dalam melakukan survei atau navigasi di darat, laut, dan udara. Namun
karena perkembangan teknologi semakin cepat dan kebutuhan manusia semakin
banyak, sistem penentuan posisi sekarang tidak hanya dilakukan dari satelit ke
permukaan bumi tapi bisa juga dilakukan di bawah air terutama di bawah laut.
Sistem penentuan posisi di bawah air ini sangat berguna untuk kegiatan-kegiatan di
lepas pantai, seperti pengeboran, pemasangan pipa bawah laut, investigasi dasar laut
menggunakan ROV, dan lain-lain. Penentuan posisi bawah air ini memanfaatkan
gelombang akustik dalam penggunaannya karena gelombang elektromagnetik tidak
bagus ketika merambat di dalam air yang nantinya akan menyebabkan akurasi posisi
yang dihasilkan akan jelek. Penentuan posisi bawah air prinsipnya sama dengan
penentuan posisi dari satelit ke permukaan, yang membedakan hanyalah jenis
2
Bab 2
Pembahasan
2.1
Dasar Teori
Sistem penentuan posisi akustik bawah laut (Underwater Acoustic Positioning
Systems) adalah sistem penentuan posisi menggunakan metode gelombang akustik
untuk mendapatkan koordinat dari suatu objek yang ada di bawah air. Dalam
penggunaannya hampir sama dengan metode penentuan posisi dengan GPS. Namun
karena gelombang elektromagnetik tidak bagus digunakan di bawah air maka sistem
penentuan posisi ini menggunakan gelombang akustik. Adapun macam-macam
sistem penentuan posisi bawah laut dengan gelombang akustik ini ada 4, yaitu
USBL, SBL, LBL, dan kombinasi. Perbedaan dari macam-macam penentuan posisi
bawah air tersebut berdasarkan jumlah beacon yang dipakai, akurasi penentuan
posisi, kedalaman air, dan alat yang dipakai.
2.1.1 Ultra Short BaseLine (USBL)
Ultra Short BaseLine adalah sistem penentuan posisi bawah air yang menggunakan
transduserterpasang di bawah lambung kapal untuk mendeteksi jarak dan sudut pada
target menggunakan sinyal akustik. Pada metode USBL terdapat 2 bagian penting,
yaitu sistem USBL yang dipasang pada kapal, seperti transceiver, bagian pemroses
data, dan sensor-sensor lainnya. Dan yang kedua adalah bagian transponder akustik
yang digunakan untuk tracking pada target di bawah air atau penentuan posisi secara
relatif terhadap kapal. Jarak baseline antara transduser yang digunakan berkisar 2-10
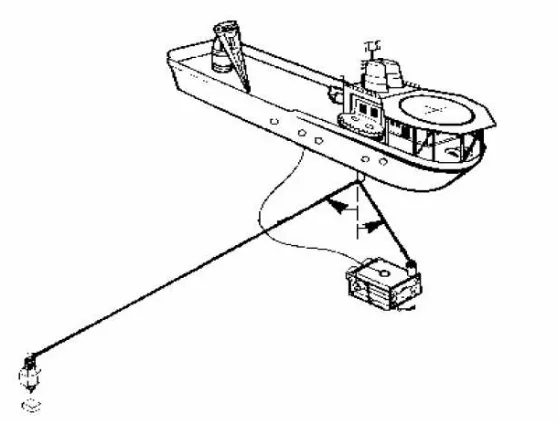
3 Gambar 2.1 Ilustrasi Penentuan Posisi Dengan Metode USBL (Macleod, 2003)
Dalam memperoleh posisi beacon yang ada di dasar laut dengan metode USBL
menggunakan prinsip pengukuran jarak secara akustik dan arah. Dalam memperoleh
jarak secara akustik, prinsipnya adalah menghitung waktu perjalanan gelombang
akustik yang ditembakan dari transduser yang ada di permukaan laut ke beacon yang
ada di dasar laut dan kembali lagi ke transduser yang ada di permukaan laut. Dalam
menghitung waktu perjalanan sangatlah mudah, karena suda ada alat yang dapat
mengukur kecepatan gelombang akustik di dalam air seperti Sound Velocity Profiler
(SVP).
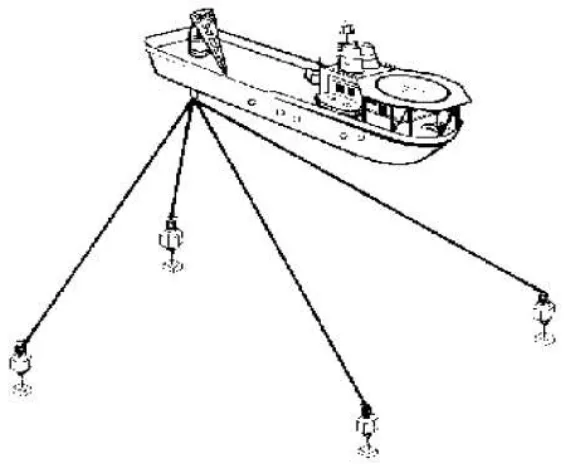
2.1.2 Short BaseLine (SBL)
Metode SBL biasanya digunakan pada kapal seperti barge, semi-submersible atau
kapal pengeboran yang besar. Jumlah transducer yang dipasang pada bagian bawah
kapal minimal 3 atau 4 dan dipasang membentuk segitiga atau segi empat. Jarak
antara baseline minimal 10 meter. Posisi dari tiap-tiap transducer berdasarkan
kerangka koordinat kapal yang ditentukan dari survei as built. Pada Gambar 2.2
4 Gambar 2.2 Ilustrasi Metode Penentuan Posisi Bawah Laut Dengan SBL (Macleod,
2003)
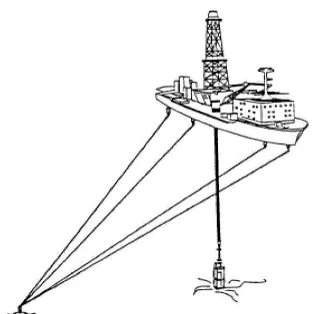
2.1.3 Long BaseLine (LBL)
Short BaseLine adalah teknik penentuan posisi bawah air yang menggunakan
sekumpulan transponder yang dipasang pada lokasi yang fiks dan sudah diketahui
posisinya di dasar laut. Jarak antara transponder biasanya antara 10 – 10.000 m,
lebih panjang daripada metode penentuan posisi bawah laut lainnya. Posisi dari suatu
target dapat ditentukan dengan menghitung jarak antara target dan masing-masig
transponder yang ada di dasar laut. Pada Gambar 2.3 berikut mengilustrasikan
5 Gambar 2.3 Ilustrasi Penentuan Posisi Bawah Laut Dengan Metode LBL (Macleod,
2003)
Ada 2 elemen dalam metode penentuan posisi bawah laut dengan LBL, yang pertama
adalah jumlah transponder yang dipasang pada permukaan dasar laut. Posisi dari
tiap-tiap transponder dideskripsikan dalam kerangka koordinat fiks baik itu secara
absolut atau relatif di dasar laut. Dan yang kedua adalah transceiver akustik yang
biasanya dipasang pada kapal atau peralatan bawah laut seperti ROV yang terhubung
dengan transduser yang dikendalikan dari kapal.
2.1.4 Metode Kombinasi
Metode kombinasi adalah metode penentuan posisi bawah air yang
mengkombinasikan metode-metode yang sudah dijelaskan sebelumnya. Contoh dari
metode kombinasi yang sering dipakai adalah Long and Short BaseLine (LSBL) dan
Long and Ultra Short BaseLine (LUSBL). Pada Gambar 2.4 berikut
6 Gambar 2.4 Ilustrasi Penggunaan Metode LUSBL (Macleod, 2003)
2.2
Peralatan Yang Digunakan
2.2.1 Transducer Akustik
Ada berbagai macam trasducer akustik yang dipakai berdasarkan aplikasi
penggunaannya untuk menentukan posisi bawah air. Transducer biasanya dipasang
dengan suatu tiang penyangga (pole) pada kapal. Dan pole tersebut dipasang di
bagian bawah lambung kapal atau bagian sisi-sisi kapal. Gambar 2.5 di bawah ini
menunjukkan salah satu contoh transducer yang dipakai pada metode USBL.
7 2.2.2 Beacon
Ada berbagai macam beacon yang dipakai dalam penentuan posisi bawah air, yaitu :
1. Pingers
Pingers adalah beacon yang dipasang di permukaan dasar laut yang
diprogram untuk mengirimkan sinyal (ping) dengan frekuensi dan perulangan
tertentu. Beberapa pinger dapat dimatikan dengan sistem mekanik atau
dengan perintah melalui gelombang akustik. Sistem USBL dan SBL yang
lama sering memakai pinger dalam pengoperasiannya.
2. Transponder
Transponder adalah alat yang dapat mengirimkan sinyal akustik ketika proses
penentuan posisi bawah air berlangsung. Transponder yang bagus memiliki
microprocessor sehingga dapat berkomunikasi melalui telemetri akustik.
Transponder yang bagus tersebut dapat mengatur akustik dari transponder
tersebut dan biasanya terdapat sensor-sensor tambahan, seperti sensor
kedalaman, suhu, dan salinitas.
8
3. Responder
Responder adalah suatu beacon yang terhubung melalui kabel terhadap suatu
unit pengontrol. Beacon ini diatur secara elektrik dan mengirimkan sinyal
akustik dalam merespon pemicu akustik lainnya.
2.3
Tingkat Akurasi
2.3.1 Ultra Short BaseLine (USBL)
Tingkat akurasi sistem USBL yang sudah modern dapat mencapai 1% lebih baik
pada jarak miring antara transducer yang ada di kapal terhadap beacon yang ada di
permukaan dasar laut. Biasanya 20 m pada kedalaman 2.000 m. Adapun tingkat
akurasi dari metode USBL dipengaruhi oleh beberapa faktor, yaitu jumlah sinyal
akustik yang diterima transponder dan posisi dari beacon yang ditempatkan di
permukaan dasar laut.
2.3.2 Short BaseLine (SBL)
Tingkat akurasi dari SBL dipengaruhi oleh jarak antara transducer yang ada di kapal
dengan kualitas dari sensor-sensor tambahan, seperti gyrocompass dan Vertical
Reference Unit (VRU). Sistem pada SBL akan memberikan akurasi yang tinggi
apabila kapal yang digunakan berada tepat di atas beacon-beacon yang ada di
permukaan dasar laut. Sistem SBL ini biasanya digunakan pada kapal pengeboran
(drillship) agar kapal tersebut tetap berada tepat di atas lokasi wellhead.
2.3.3 Long BaseLine (LBL)
Tingkat akurasi pada sistem Long BaseLine (LBL) dijabarkan pada tabel berikut.
Tabel 2.1 Tingkat Akurasi Sistem LBL
Frequency LF (8 to 16 kHz) MF (18 to 36 kHz) EHF (50 to 110 kHz) Standard Range 1,000 to 3,500m 300 to 800m 50 to 500m
Maximum Range 10,000m 2,500m 1,000m
9
2.4
Kalibrasi
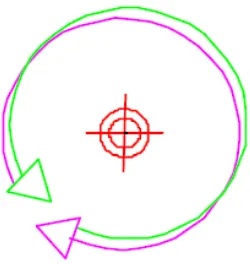
2.4.1 Ultra Short BaseLine (USBL)
Pada sistem USBL memerlukan data masukan dari gyrocompass dan VRU.
Sensor-sensor tersebut memungkinkan sistem USBL memproses nilai suatu posisi secara
absolut pada transponder yang ada di permukaan dasar laut. Gyrocompass dan
vertical reference unit akan dipasang pada lokasi yang berbeda dengan transceiver
USBL. Proses kalibrasi USBL dilakukan agar mendapatkan nilai error dari orientasi
pitch, roll, dan heading.
Gambar 2.7 Pergerakan Kapal Ketika Kalibrasi USBL (Macleod, 2003)
2.4.2 Short BaseLine (SBL)
Pada sistem SBL, kalibrasi yang dilakukan meliputi pengukuran teliti secara offset
antar kapal yang sudah dipasang transducer.
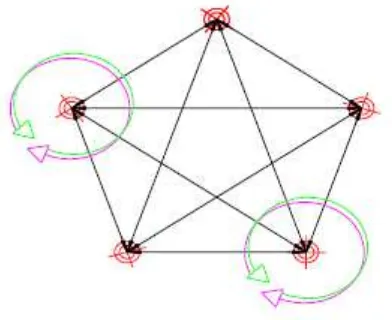
2.4.3 Long BaseLine (LBL)
Kalibrasi yang dilakukan dengan metode LBL ada 2, yaitu kalibrasi relatif dan
kalibrasi absolut. Kalibrasi LBL secara relatif bertujuan untuk menentukan posisi
relatif semua transponder yang sudah dipasang di permukaan dasar laut, dengan cara
pengukuran baseline secara akustik antar transponder. Pada Gambar 2.8 berikut
10 Gambar 2.8 Ilustrasi Kalibrasi LBL Secara Relatif (Macleod, 2003)
Dan yang kedua adalah kalibras LBL secara absolut. Transponder yang ada di
permukaan dasar laut dikalibrasi dengan koordinat absolut melalui pengukuran
DGPS fiks dan jarak akustik ke transponder lain secara bersama-sama. Cara yang
paling mudah dalam menentukan posisi transponder secara absolut adalah dengan
meletakannya pada sumur (wellhead) atau manifold. Pada Gambar 2.9 berikut
mengilustrasikan tentang kalibrasi LBL secara absolut.
11
Bab 3
Kesimpulan
Dari penjelasan pada bab sebelumnya, dapat disimpulkan bahwa sistem penentuan
posisi bawah air secara akustik ada 4 metode, yaitu USBL, SBL, LBL, dan metode
kombinasi. Penggunaan dari keempat metode tersebut harus disesuaikan dengan
kebutuhan karena setiap metode mempunyai kelebihan dan kekurangan. Akurasi dan
12
Daftar Pustaka
Macleod, J. 2003. Underwater Acoustic Positioning Systems. Hydrographic Society,
Scotland.
Lekkerkerk, H., Theijs, M. J. 2011. Handbook of Offshore Surveying : Volume Two