6
BAB II
LANDASAN TEORI
2.1. Sistem Kontrol
Sistem kendali atau sistem kontrol adalah suatu alat (kumpulan alat) untuk mengendalikan, memerintah, dan mengatur keadaan dari suatu sistem. Sesuai dengan fungsi pengontrolan secara menyeluruh, maka komponen sistem pengontrolan dapat dibagi atas 4 bagian yaitu : sensor (Transducer), pemproses, penggerak dan penguat. Sistem kontrol berdasarkan cara kerjanya dapat dibagi menjadi dua bagian, yaitu sistem kontrol loop terbuka dan tertutup.
2.1.1. Sistem Loop terbuka
Sistem kontrol Loop terbuka adalah suatu sistem kontrol dimana keluarannya tidak berpengaruh pada aksi pengaturan. Jadi pada sistem kontrol Loop terbuka ini keluaran tidak diukur ataupun di umpan balikkan untuk dibandingkan dengan masukan acuan. Untuk lebih jelasnya dapat dilihat pada diagram blok dari sistem pengendalian Loop terbuka pada gambar 2.1
Gambar 2.1 Diagram kendali Loop terbuka
Pada kendali Loop terbuka keluarannya tidak dapat dipergunakan sebagai perbandingan umpan balik dengan masukan, jadi untuk setiap masukan acuan berhubungan dengan kondisi operasi tertentu.
2.1.2. Sistem Loop tertutup
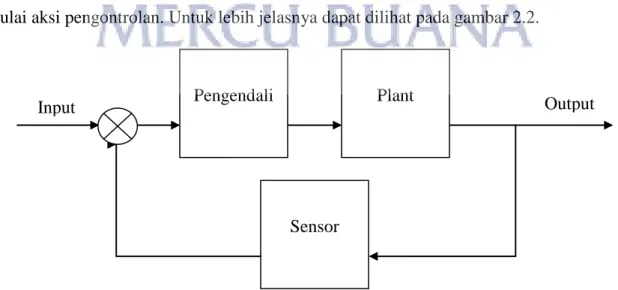
Sistem kontrol Loop tertutup adalah suatu sistem kontrol yang sinyal keluarannya berpengaruh secara langsung pada aksi pengontrolan.Jadi sistem kontrol Loop tertutup ini adalah merupakan sistem kontrol dengan menggunakan umpan balik. Pada dasarnya umpan balik ini merupakan hasil proses yang terjadi.
Namun karena terjadinya beberapa gangguan yang bersifat merugikan sehingga hasil keluaran tidak sesuai dengan apa yang dikehendaki, maka perlu dibandingkan kembali untuk memulai aksi pengontrolan. Untuk lebih jelasnya dapat dilihat pada gambar 2.2.
Gambar 2.2 Diagram kendali Loop tertutup Sensor Plant Pengendali Sistem Proses Pengendali Input Output Input Output
Hasil keluaran pada sistem kendali Loop terbuka tidak dapat dipergunakan sebagai perbandingan umpan balik dengan masukan, jadi untuk setiap masukan acuan berhubungan dengan kondisi operasi tertentu.
2.2 Dasar Arduino
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Mikrokontroler itu sendiri adalah chip atau IC (integrated Circuit) yang bisa diprogram menggunakan komputer. Tujuan menanamkan program pada mikrokontroler adalah agar rangkaian elektronik dapat membaca input, proses, dan output sebuah rangkaian elektronik.
Arduino adalah inovasi dibidang elektronika yang telah membuat perubahan besar dalam dunia mikrokontroler sehingga seorang yang awam amatiran bisa membuat proyek-proyek elektronika atau robotika dengan relatif mudah dan cepat.Arduino lahir dari lingkungan mahasiswa dan dosen yang merasakan sulitnya mempelajari mikrokontroler.Kemudian mereka mengembangkan sebuah sistem minimum berbasis AVR yang dilengkapi dengan bootloader dan
software yang user friendly.Hasilnya adalah sebuah board mikrokontroler yang bersifat open source yang bisa dipelajari atau dikembangkan oleh mahasiswa, profesional, atau penggemar
mikrokontroler di seluruh dunia. Konon Arduino sudah lebih popular dibandingkan Basic Stamp yang lahir lebih awal yang harganya relatif mahal dan close source. Penjualan board Arduino bisa menghasilkan milyaran Rupiah pada penjualan kit online seperti Sparkfun.
Mikrokontroler ada pada perangkat elektronik di sekelililng kita. Misalnya Handphone, MP3 player, DVD, televisi, AC, dll. Mikrokontroler juga dipakai untuk keperluan mengendalikan robot.
Karena komponen utama Arduino adalah mikrokontroler, maka Arduino pun dapat diprogram menggunakan komputer sesuai dengan kebutuhan kita. Adapun data teknis board Arduino UNO sebagai berikut :
• Mikrokontroler : Arduino UNO • Tegangan Operasi : 5 V
• Tegangan Input (recommended) : 7 - 12 V • Tegangan Input (limit) : 6 - 20 V
• Pin digital I/O : 14 ( 6 diantaranya pin PWM ) • Pin analog input : 6
• Arus DC per pin I/O : 40 mA • Arus DC untuk pin 3.3 V : 150 mA
• Flash Memory : 32 KB dengan 0.5 KB digunakan untuk bootloader • SRAM : 2 KB
• EEPROM : 1 KB
• Kecepatan Pewaktu : 16 MHz
Dapat dibawa kemana-mana bersama laptop atau dimasukkan ke dalam saku.Walaupun bahasa pemrograman Arduino adalah bahasa C/C++, tetapi dengan penambahan library dan fungsi-fungsi standar membuat pemrograman Arduino lebih mudah dipelajari dan manusiawi. Contoh, untuk mengirimkan nilai HIGH pada pin 10 Arduino, cukup menggunakan fungsi digitalWrite (10, HIGH), sedangkan kalau menggunakan bahasa C aslinya adalah PORTB I=(1<<2).
Tersedia library yang sangat banyak untuk menghubungkan Arduino dengan macam-macam sensor, actuator maupun modul komunikasi.Misalnya library untuk mouse, keyboard, servo, GPS, dsb.Berhubung Arduino adalah open source, maka library-library ini juga open
source dan dapat di-download secara gratis di website Arduino.Dengan bahasa yang lebih mudah
dan adanya library dasar yang lengkap, maka mengembangkan aplikasi elektronik relatif lebih mudah.Contoh, kalau kita ingin membuat robot wireless, cukup membeli sebuah modul
Bluetooth dan menyambungkan ke Arduino.
Arduino tidak membuat bahasa pemrograman khusus, melainkan menggunakan bahasa C yang sudah ada, lebih tepatnya menggunakan bahasa C yang menggunakan compiler AVG – GCC (AVR GNU C – Compiler).Bahasa C adalah bahasa yang sangat lazim dipakai sejak awal-awal komputer diciptakan dan sangat berperan dalam perkembangan software. Bahasa C telah banyak membuat bermacam-macam sistem operasi Unix, linux, dsb. Bahasa C juga biasanya digunakan di akademi dan perguruan tinggi selain bahasa pemrograman basic atau
pascal.Bahasa C adalah bahasa pemrograman yang sangat ampuhyang kekuatannya mendekati
bahasa assembler.
Bahasa C menghasilkan file kode objek yang sangat kecil dan dieksekusi dengan sangat cepat. Karena itu bahasa C sering digunakan pada sistem operasi dan pemrograman
mikrokontroler. Bahasa C adalah multi-platform, bahasa C bisa diterapkan pada lingkungan windows, Unix, Linux, atau sistem operasi lain tanpa mengalami perubahan source code ( kalaupun ada perubahan, biasanya sangat minim). Karena Arduino menggunakan bahasa C yang
multi-platform, maka software Ardunio pun bisa dijalankan pada semua sistem operasi yang
umum, misalnya : Windows, Linux, MacOs. Bahasa C mudah dipelajari.Maksud kata mudah di sini adalah relatif, tergantung kemampuan dari tiap user. Kalau anda sudah mengerti bahasa C, anda dapat melakukan pengembangan dengan board lain atau mikrokontroler lain dengan lebih mudah. Diinternet banyak library bahasa C untuk Arduino yang bias di-download secara gratis.Setiap library Arduino biasanya disertai dengan contoh pemakaiannya.Keberadaan
library-library ini bukan hanya membantu kita membuat proyek mikrokontroler. Tetapi bias
dijadikan sarana untuk mendalami pemrograman bahasa C pada mikrokontroler.
2.2.1 Soket USB
Soket USB adalah soket untuk kabel USB yang disambungkan ke komputer atau laptop.Berfungsi untuk mengirimkan program ke Arduino dan juga sebagai port komunikasi serial.
2.2.2 Input / Output Digital
Input/output digital atau digital pin adalah pin-pin untuk menghubungkan Arduino dengan komponen atau rangkaian digital. Misalnya, kalau igin membuat LED berkelip, LED tersebut dapat dipasang pada salah satu pin I/O digital dan ground. Komponen lain yang menghasilkan output digital atau menerima input digital bisa disambungkan ke pin-pin ini.
2.2.3 Input Analog
Input Analog atau analog pin adalah pin-pin yang berfungsi untuk menerima sinyal dari komponen atau rangkaian analog. Misalnya dari potensiometer, sensor suhu, sensor cahaya, dsb.
2.2.4 Accu
Accu adalah suatu alat yang menyimpan tegangan 12 VDC sesuai keperluan yang akan dibutuhkan, accu menyuplai tegangan ke motor shield dengan tegangan 12 VDC untuk menggerakan motor dc pada robot.
2.2.5 Baterai / Adaptor
Soket baterai atau adaptor digunakan untuk menyuplai Arduino dengan tegangan dari baterai / adaptor 12 V pada saat Arduino sedang tidak disambungkan ke komputer.Kalau Arduino sedang disambungkan ke komputer melalui USB, Arduino mendapatkan suplai tegangan dari USB, jadi tidak perlu memasang baterai atau adaptor saat memprogram Arduino. 2.3 Motor DC
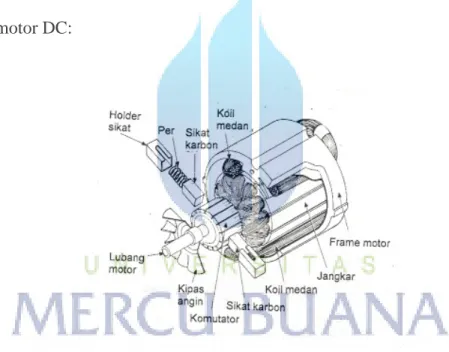
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar).
Motor DC berfungsi untuk mengubah tenaga listrik arus searah menjadi tenaga gerak.Tenaga gerak tersebut berupa putaran dari rotor. Jadi motor DC menerima arus DC dari jala-jala dirubah menjadi energi mekanik berupa putaran yang nantinya akan dipakai oleh peralatan lain.
2.3.1 Prinsip Kerja Motor DC
Prinsip kerja pada motor DC adalah :
• Adanya garis-garis gaya medan magnet (fluks) antara kutub yang berada pada stator. • Penghantar yang dialiri arus ditempatkan pada jangkar yang berada dalam medan magnet. • Pada penghantar timbul gaya yang menghasilkan torsi.
Konstruksi motor DC:
Gambar 2.4 Konstruksi Motor DC
2.4. Motor Driver
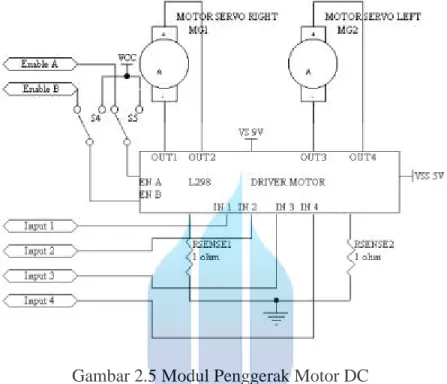
Untuk menggerakkan motor DC pada robot digunakan IC driver L298 yang memiliki kemampuan menggerakkan motor DC sampai arus 2A dan tegangan maksimum 40 volt DC
untuk satu kanalnya. Pin EnableA dan B untuk mengendalikan jalan atau kecepatan motor, pin Input 1 sampai 4 untuk mengendalikan arah putaran. Pin Enable diberi VCC 5 Volt untuk kecepatan penuh.
PWM (
Gambar 2.5 Modul Penggerak Motor DC
Pulse Width Modulation) untuk kecepatan rotasi yang bervariasi tergantung dari level highnya.Ilustrasinya ditunjukkan pada gambar 2.6.
Dari gambar 2.6 dapat dijelaskan jika dikehendaki kecepatan penuh maka diberikan 5 Volt konstan, jika dikehendaki kecepatan bervariasi maka diberikan pulsa yang lebar
Gambar 2.6Ilustrasi Pulse Width Modulation
high dan low-nya bervariasi. Satu periode pulsa memiliki waktu yang sama sehingga dalam contoh diatas,
kecepatan motor akan berubah dari setengah kecepatan penuh menjadi mendekati kecepatan penuh. Biasanya digunakan lebar pulsa dalam beberapa milisekon misalnya 2 ms. Input untuk motor servo kanan adalah input 1 (C) dan 2 (D), direction
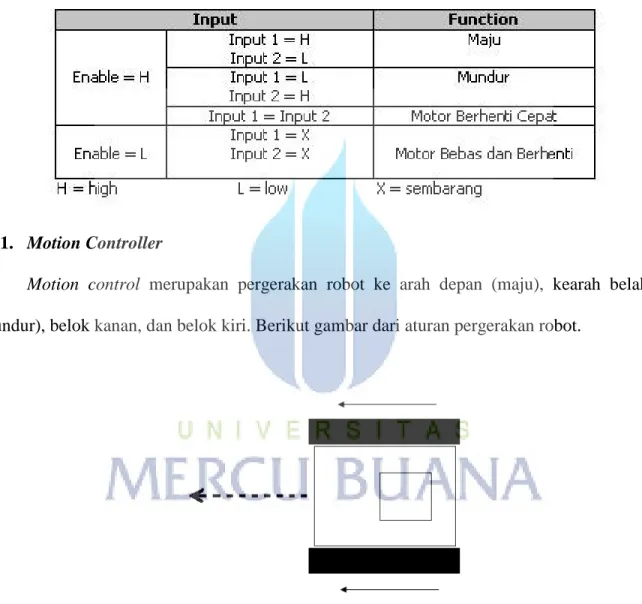
Tabel 2.1. Pengaturan IC Driver Motor
-nya dapat dilihat pada tabel 1.
2.4.1. Motion Controller
Motion control merupakan pergerakan robot ke arah depan (maju), kearah belakang
(mundur), belok kanan, dan belok kiri. Berikut gambar dari aturan pergerakan robot.
Gambar 2.8Aturan Pergerakan Mundur
Gambar 2.9 Aturan Pergerakan Belok Kanan
2.5. SENSOR
Sensor adalah sesuatu yang digunakan untuk mendeteksi adanya perubahan lingkungan fisik atau kimia.Variabel keluaran dari sensor yang diubah menjadi besaran listrik disebut Transduser.Pada saat ini, sensor tersebut telah dibuat dengan ukuran sangat kecil dengan ordenanometer.Ukuran yang sangat kecil ini sangat memudahkan pemakaian dan penghematan energy.
2.5.1. Range Finder Sensor
Range finder sensor merupakan sensor jarak yang digunakan untuk mengetahui posisi robot terhadap dinding kanan, dinding kiri, dinding depan, dan furniture-furniture yang terdapat di dalam ruangan. Dengan diketahuinya posisi ini maka robot dapat memberikan keputusan
gerakan apa yang akan dilakukan. Pada robot ini digunakan 6 buah sensor pengukur jarak yang dipasang pada sisi kiri, kanan, depan, dan belakang robot. Sensor kanan dan sensor kiri dipasang mengarah ke samping dengan sudut sebesar 90º dari arah depan. Hal ini dimaksudkan agar pembacaan jarak lebih sensitif dan range yang lebih luas, karena dengan perubahan sedikit saja arah robot maka akan mengakibatkan perubahan jarak yang besar antara robot dengan dinding yang diukur.
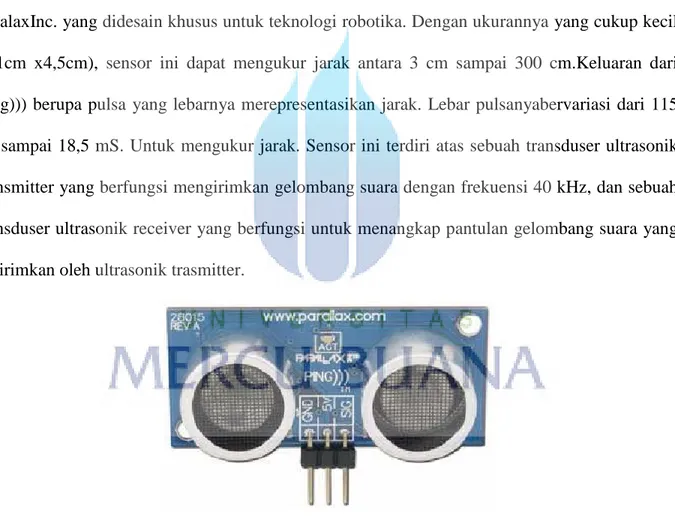
Sensor yang digunakan adalah modul pengukur jarak dengan ultrasonic buatan ParalaxInc. yang didesain khusus untuk teknologi robotika. Dengan ukurannya yang cukup kecil (2,1cm x4,5cm), sensor ini dapat mengukur jarak antara 3 cm sampai 300 cm.Keluaran dari Ping))) berupa pulsa yang lebarnya merepresentasikan jarak. Lebar pulsanyabervariasi dari 115 uS sampai 18,5 mS. Untuk mengukur jarak. Sensor ini terdiri atas sebuah transduser ultrasonik transmitter yang berfungsi mengirimkan gelombang suara dengan frekuensi 40 kHz, dan sebuah transduser ultrasonik receiver yang berfungsi untuk menangkap pantulan gelombang suara yang dikirimkan oleh ultrasonik trasmitter.
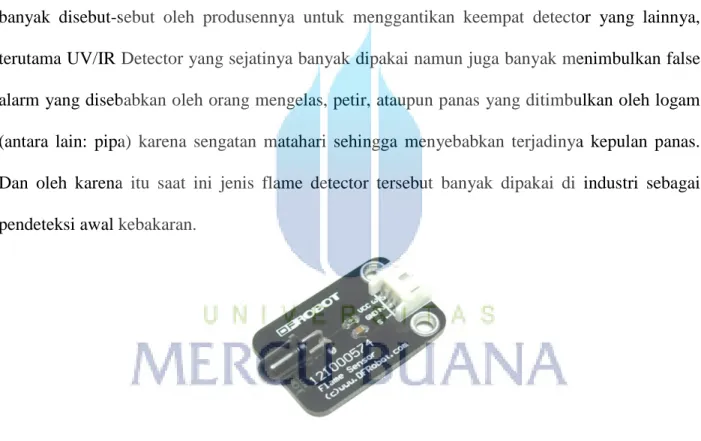
2.5.2. Flame Detector
Flame detector merupakan sebuah alat pendeteksi api yang menggunakan sensor optic untuk mendeteksinya. Di sini ditegaskan bahwa flame detector digunakan untuk mendeteksi keberadaan api, bukan panas. Prinsip kerja flame detector adalah dimulai dari api akan bisa dideteksi oleh keberadaan spectrum cahaya infrared maupun ultraviolet, dan dari situ semacam microprocessor dalam flame detector akan bekerja untuk membedakan spectrum cahaya yang terdapat pada api yang terdeteksi tersebut.
Namun pada implementasinya , terdapat sumber-sumber cahaya lain yang ternyata bukan api dan ikut menyumbang emisi cahaya pada gelombang infra red maupun ultraviolet dimana sumber-sumber cahaya ini juga mempengaruhi kinerja flame detector yang berakibat pada timbulnya false alarm. Contoh sumber-sumber cahaya ini adalah kilatan petir, welding arc, metal grinding, hot turbine, reactor, dan masih banyak lagi.
Berikut ini adalah beberapa tipe flame detector yang ada dipasaran ; 1. Infrared (IR) Detector
Infrared flame detector bekerja pada pita spectral inframerah. Gas panas akan mengeluarkan sebuah pola spectral spesifik didaerah inframerah, dimana ini akan disensor oleh sebuah Thermal Imaging Camera (ITC), sebuah tipe kamera thermograpic.False alarm bisa disebabkan oleh permukaan panas lain dan radiasi thermal di area yang terkaburkan oleh air dan energi matahari. Frenkuensi dalam single IR Flame Detector memiliki sensitivitas pada range 4,4 micrometer dengan respon waktu sebesar 3-5 detik.
2. Ultra violet (UV) Detector
Ultra violet detector bekerja pada panjang gelombang dibawah 300 nm. Detector ini mendeteksi kebakaran dan ledakan diantara 3-4 milidetik melalui radiasi UV yang dipancarkan saat
penyalaan.False alarm akan dipicu oleh sumber-sumber UV seperti petir, arc welding,radiasi, dan cahaya matahari. Dan dalam desain implementasi UV Flame Detector ini , sering digunakan time-delay selama 2-3 detik untuk mengurangi intenitas false alarm.
3. Dual IR (IR/IR) Detector
Dual IR flame detector membandingkan sinyal mula di dua infrared range.Dalam hal ini, satu sensor bekerja pada range 4.4 micrometer dan sensor lainnya pada sebuah frekuensi referensi. 4. UV/IR Detector
UV/IR flame detector membandingkan sinyal mula di dua infrared range, yaitu pada konfigurasi “AND” dan rasionya secara berhubungan satu sama lain untuk memastikan fire signal dan meminimalisasi false alarm.
5. UV/IR and Visible Detector
Pada beberapa detector, sensor untuk radiasi terlihat akan ditambahkan pada desain dengan tujuan untuk mampu mengatasi false alarm secara lebih baik atau memperbaiki range deteksi. 6. Triple IR (IR/IR/IR) Detector
Triple IR flame detectors membadingkan tiga pita panjang gelombang spesifik dalam daerah spektral Inframerah dan rasionya secara berhubungan satu sama lain untuk pendeteksian api yang dapat diandalkan keakuratannya dalam usahanya mengurangi false alarm. Dalam hal ini, satu sensor akan bekerja pada range 4.4 micrometer dan sensor lainnya pada frekuensi referensi. Triple IR detector juga beresiko pada pengaburan yang disebabkan oleh air dan pengurangan sensitivitas oleh sinar matahari.
7. CCTV (Video) Flame Detector
Closed-circuit television (CCTV) atau web camera bisa digunakan untuk deteksi video (panjang gelombang antara 0.4 dan 0.7 µm).seperti manusia, kamera juga bisa dibutakan oleh asap dan kabut.
Dalam perkembangan ketujuh jenis detector tersebut, tiga jenis flame detector yang terakhir (UV/IR and Visible Detector, Triple IR Detector, dan CCTV Flame Detector) paling banyak disebut-sebut oleh produsennya untuk menggantikan keempat detector yang lainnya, terutama UV/IR Detector yang sejatinya banyak dipakai namun juga banyak menimbulkan false alarm yang disebabkan oleh orang mengelas, petir, ataupun panas yang ditimbulkan oleh logam (antara lain: pipa) karena sengatan matahari sehingga menyebabkan terjadinya kepulan panas. Dan oleh karena itu saat ini jenis flame detector tersebut banyak dipakai di industri sebagai pendeteksi awal kebakaran.
Gambar 2.11 Photodiode
Sensor photodiode adalah salah satu jenis sensor peka cahaya (photodetector). Photodiode akan mengalirkan arus yang membentuk fungsi linear terhadap intensitas cahaya yang diterima. Arus ini umumnya teratur terhadap power density (Dp). Perbandingan antara arus keluaran dengan power density disebut sebagai current responsitivity.Arus yang dimaksud adalah arus bocor ketika photodiode tersebut disinari dan dalam keadaan dipanjar mundur.
Hubungan antara keluaran sensor photodiode dengan intensitas cahaya yang diterimanya ketika dipanjar mundur adalah membentuk suatu fungsi yang linier.Hubungan antara keluaran sensor photodiode dengan intensitas cahaya ditunjukkan pada Gambar berikut.
Gambar 2.12 Hubungan keluaran photodiode dengan intensitas cahaya
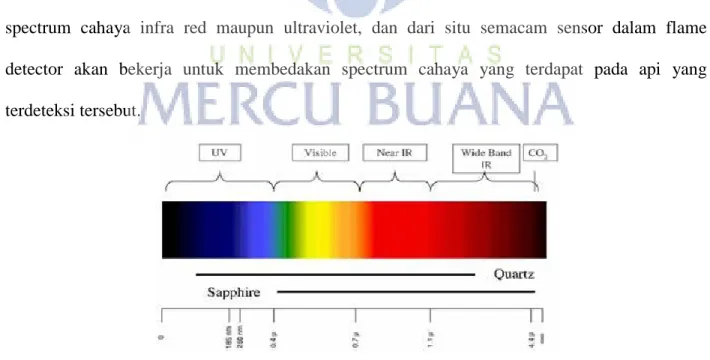
Prinsip kerja flame detector adalah dimulai dari bahwa api akan bisa dideteksi oleh keberadaan spectrum cahaya infra red maupun ultraviolet, dan dari situ semacam sensor dalam flame detector akan bekerja untuk membedakan spectrum cahaya yang terdapat pada api yang terdeteksi tersebut.
Photo diode merupakan komponen utama yang dapat menangkap intensitas dan frekuensi api yang terdapat dalam cahaya api. Jenis photo diode yang digunakan adalah VTB5041 yang mana sensor ini sangat peka pada cahaya berwarna biru (datasheet terlampir).