PENGONTROL ADAPTIVE DENGAN UMPAN BALIK TAK LINEAR UNTUK MOTOR INDUKSI 3 FASA
Slamet Wibawanto
Abstrak: Dengan menggabungkan hukum adaptasi parameter berdasarkan kesalahan penjejakan dan estimasi parameter berdasarkan kesalahan prediksi dapat diperoleh peningkatan untuk kerja hokum kontrol adaptif model acuan. Hukum adaptasi komposit ini memungkinkan penggunakan penguatan adaptasi yang tinggi guna memperoleh respon yang cepat tanpa menimbulkan osilasi maupun overshood. Hukum adaptasi komposit cocok digunakan pada sistem dimana parameter yang diadaptasi lebih dari satu. Implementasi pada motor iduksi untuk putaran rendah menunjukkan bahwa motor mempunyai rospon yang sangat cepat dan robust terhadap perubahan torsi beban.
Kata Kunci: Composite adaptive, motor induksi, putaran rendah Adaptasi parameter sistem dapat
diturun-kan berdasarditurun-kan kesalahan penjejaditurun-kan (tracking-error) maupun berdasarkan ke salahan prediksi (prediction-error)(Slotin ,1991). Hukum konrol komposit adaptif adalah hokum kontrol yang menggabung-kan hukum adaptasi parameter berdasarka kesalahan penjejakan dan hukum estimasi parameter bedasarkan kesalahan prediksi.
Hukum Kontrol Adaptif Model Acuan
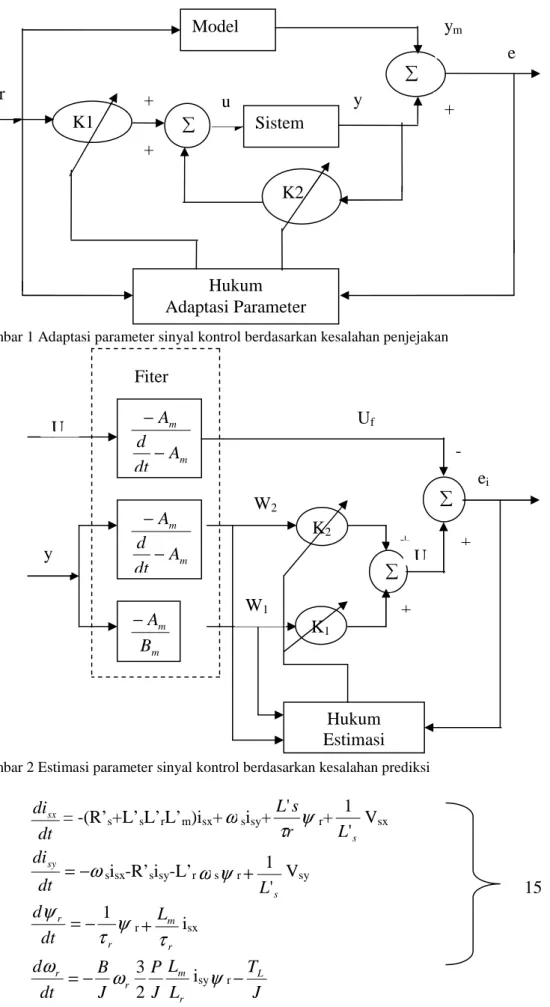
Obyektif sistem kontrol adaptif mo-del acuan adalah menurunkan hokum kon trol adaptif sedemikian rupa sehingga ke-salahan penjejakan konvergen menuju nol (sumber). Diagram blok sistem kontrol di tunjukkan pada Gambar 1.
Bu Ay dt dy + − = (1) r B Y A dt dy m m m m =− + (2) dt dy dt dy dt de = − m (3) Tinjau sistem orde satu pada maan (1) dan model acuannya pada persa-maan (2) dimana A, Am, B dan Bm adalah parameter model, y dan ym menyatakan keluran dan r menyatakan set-poin. Error tracking dapat didefinisikan pada persa-maan (3). Jika K=[k1k2]T adalah parame-ter yang harus diadaptasi dan λ = [y]T me-nyatakan sinyal informasi kemudian dipi-lih hokum kontrol u = KTλ, maka dinami ka sistem kontrol akan sama dengan
dina-mika model acauan jika diperoleh parame ter ideal pada persamaan (4). Sedangkan definisi kesalahan parameter
θ
= K−
K*, maka kondisi konvergn dapat tercapai jika ruas kanan sama denga ruas kiri pada persamaan (5) T m m B B A B B K − = * (4) θλ m A B e= (5) λ γ θ γ θ e e e dt d ' − = ∂ ∂ − = (6) dimana: m A B γ γ'= . dt d dt dk = θ (7)Hukum adaptasi parameter selanjutnya da pat ditentukan menggunakan MIT Rule (Astrom,1989) pada persaman (6) dimana
γ adalah konstanta positif, dikenal sebagai
adaptation gain. Dalam hal ini harga B
ti-dak perlu diketahui. Mengingat bahwa pa-rameter ideal K* adalah konstanta maka da ri definisi kesalahan parameter dinyatakan pada persamaan (7).
Estimasi Parameter Berdasarkan Kasalahan Prediksi
Jika didefinisikan parameter baru pada persamaan (8). Dengan menggunaka definisi parameter ideal (4) maka persama an (8) dapat ditulis dalam bentuk lain, per Slamet Wibawanto adalah dosen Jurusan Teknik Elektro Fakultas Teknik Universitas Negeri Malang
samaan (10). u A dt d A u m m f − − = (8) Τ − − − = y A dt d A y B A w m m m m (9) Uf = K* W (10) ei = Uf - Uf (11) Maka kesalahan prediksi dapat didefinisi-kan pada persamaan (11). Dimana Uf = K W. Dengan menggunakan definisi kesala-han parameter yang dinyatakan dalam (7), maka diperoleh:
ei = (K – K*)W = θTW (12) Dengan mengunakan MIT Rule diperoleh hukum estimasi parameter sinyal kontrol:
α θ =− dt d i α θ =− ∂ ∂ei eiW (13)
dimana
α
adalah konstanta positip. Gam-bar 2 menunjukkan diagram blok estimasi parameter bedasarkan kesalahan prediksi.Algoritma Kontrol Adaptif Koposit
Dengan menggabungkan hukum adaptasi yang didasarkan pada kesalahan penjeja-kan (6) dan hukum estimasi parameter ya-ng didasarkan pada kesalahan prediksi (13) hukum adaptasi komposit:
α λ γ + − = e dt dk ' ( eiW ) (14)
Implementasi Kontrol Adaptif Komposit Dalam pengontrolan Motor Induksi Putaran Rendah
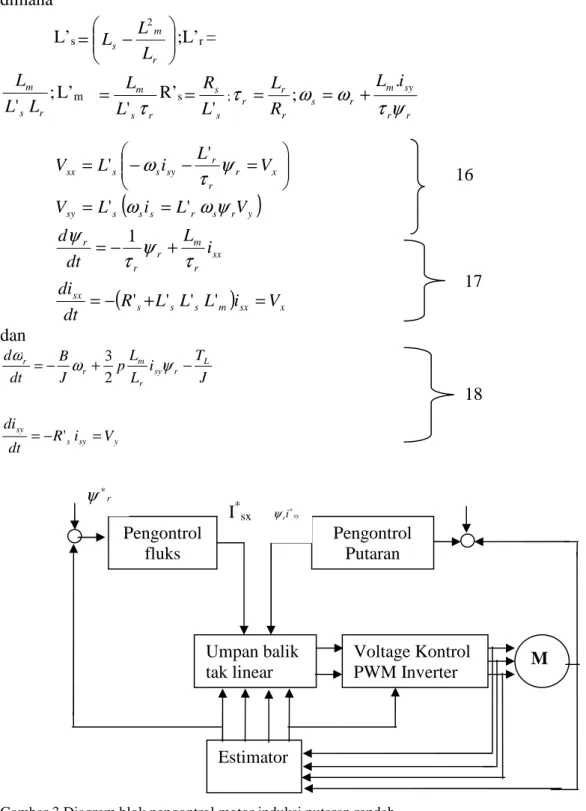
Dengan menggunakan konsep vector kon-trol yang mentransformasikan arus dan te-gangan tiga fasa mejadi arus dan teganan dua fasa dapat diturunkan model motor in duksi yang dinyatakan pada persamaan (1 5) (Wibawanto;1999).
Terlihat bahwa model motor tesebut tak-linear dan ada penyatuan antara arus pembangkit fluks isxdan arus pembangkit torsi isy.Hal ini menyulitkan pengontrolan
putarn moto induksi secara konvensional. Untul mendapatkan model motor yang
linear sekaligus memisahkan komponen arus pembangkit tosi diusulkan umpan ba-lik tak-linear pada persamaan (16).
Persamaan (17) menyatakan model fluks rotor dan (18) menyatakan model pu taran rotor. Agar model putaran rotor me-ndekati linear maka ψr harus dapat
dikon-trol dengan cepat. Atinya ini adalah pengo ntrol fluks rotor harus mempunyai respon yang cepat. Pengontrol yang cocok untuk keperluan ini adalah pengontrol adaptif ko mposit. Sementara itu putaran rotor dikon trol menggunakan pengontrol adaptif mo-del acuan.
METODE
Perancang pengotrol adaptif kompo-sit untuk fluks dilakukan sbb:
1. Pilih keluaran yang dikontrol adalah fluks rotor ψr sinyal kontrol u= isx, pa
rameter A=-1/
τr
dan B=-Lm/τr
.2. Tetapkan parameter modul acuan Am= 60 dan Bm = 60, harga fluks set-poin
ψ*r=0.5Webser.
3. Tetapkan sinyal informasi λ=[ψ*r ψr]
dan kesalahan penjejakan e =ψr -ψr :ei
4. Implementasikan hukum adaptasi para meter dk/dt =-(
γ
’eλ
=α
eiWI).5. Hitung sinyal kontrol u=K
λ
dan isx*= u.Perancang pegontrol adaptif model acuan untuk pengontrol putaran rotor adalah sebagai berikut:
1. Pilih keluaran yang dikontrol adalah putaran rotor ψr sinyal kontrol u=ψr
isy.
2. Tetapkan parameter model acauan Am
= 60 dan Bm=60 sesuai dengan respon
putaan yang diinginkan.Tetapkan pula harga yang diinginkan ψ*r.
3. Rekonstruksi sinyal informasi , . T L r r c J T − = ω∗ ω λ dan parameter − = c J T J L PL j B K L r m . 2 3
4. Implementasikan hukum adaptasi parameter DK/dt =-
γ
’eλ
5. Hitung sinyal kontrol u=K
λ
dan isx*= u/ψr.Diagram blok pengotrol selengkapnya di-tunjukkan pada Gambar 3.
HASIL
Hukum kontrol yang telah diturun kan kemudian diimplementasikan pada motor induksi 3 Hp. Spesifikasi dan para-meter motor ditunjukkan pada Tabel 1. Si mulasi dilakukan untuk putaran set-poin sebesar 20 ppm (putaran per menit ), hasil simulasi diperlihatkan pada Gambar 4 dan Gambar 5.
Tabel 1. Spesifikasi dan Parameter Motor Induksi Motor : 3 Hp, 4 poles, 60 Hz, 208 V, 10 A (rms) Rs : 0,6 Hp ohm ; Rr :0,4 ohm Ls, Lr : 0,0611 H ; Lm : 0,590 H J : o,0175 kg.m2 ; B :0,00187 N.m/rad/s (Ho,E.: 1993 : 212) PEMBAHASAN
Berdasarkan hasil pengujian atau si-mulasi pada Gambar 4, maka dapat dije-laskan bahwa perubahan torsi beban dari 12 N.m menjadi 0 N.m padat t = 0,3 detik dan dari 0 N.m menjadi 12 N.m padat t = 0,6 detik, pada putaran acuan 20 ppm me-nyebab kan kejutan putaran sebesar 0,6 p pm (3%) dan kembali pada putaran set-po int dalam waktu 5 mdetik. Hal ini menun jukkan bahwa pengontrol yang dirancang ini robust terhadap perubahan torsi beban.
Sementara itu jika motor hanya me-ngunakan pengontrol putaran saja, akibat nya motor tidak robust terhadap peubahan torsi beban seperti ditunjukan pada Gam-bar 5. Perubahan torsi beban dari 12 N.m menjadi 0 N.m mengakibatkan kejutan pu taran 1 ppm (5%) dan memerlukan waktu 100 mdetik untuk kembali ke putaran set-point. Kelemahan lainnya adalah adanya unstabil zero yang ditunjukkan dengan
respon putaran negative yang cukup besar pada saat start.
KESIMPULAN
1. Pengontrol adaptif komposit pada prinsipnya adalah pengontrol adaptif model acouan yang dilengkapi den gan estimasi parameter berdasar kan kesalahan prediksi
2. Pengontrol adaptif cocok untuk sis-tem denan lebih dari satu parameter yang tidak diketahui dan dimungkin kan mengunakan gain adaptasi yang tingi untuk mencapai konvergansial yang cepat tanpa mengakibatkan osi lasi.
3. Implementasi pengontrol adaptif ko-mposit pada motor induksi untuk pu taran rendah menunjukkan bahwa motor robust terhadap perubahan torsi beban.
DAFTAR RUJUKAN
Astrom, K.J., & Wittenmark, B., (1989), Adaptife Kontrol, Addison Wesley Pu blishing
Ho, E., & Sen P.C. (1993), High-Perfor-mance Decopling Kontrol Techniqu es for Various Rotating FiEld Machi nes,IEEE Trans. On Ind E., Vol.38, No.2, pp 208-212.
Slotine,J.J.E., & Wang C.C., (1991), Applied Nonliniar Kontrol, PreNtice Hall International Inc.
Wang, W.J., & Wang C.C., (1997), A Rotor-Fluks-Observer-Base Compo-site Adaptive Speed Kontroller for an Induction Motor, IEEE Trans. On E.C., Vol.12, No.4,pp. 323-329 Wibawanto,S. (1999), Pengontrolan
Motor Induksi Putaran Rendah Me-nggunakan Algoritma Komposit Ada ptif, Tesis Magister-Institut Tekno-logi Bandung
Gambar 1 Adaptasi parameter sinyal kontrol berdasarkan kesalahan penjejakan
Gambar 2 Estimasi parameter sinyal kontrol berdasarkan kesalahan prediksi
dt disx = -(R’s+L’sL’rL’m)isx+
ω
sisy+ ψ τr s L' r+ s L' 1 Vsxω
− = dt disy sisx-R’sisy-L’rω
sψ r s L' 1 + Vsyψ
τ
ψ
r r dt d =− 1 r r m Lτ
+ isx r m r r L L J P J B dt d 2 3ω
ω
=− isyψ r J TL − Model e Hukum Adaptasi Parameter Sistem K1 ∑ ∑ K2 r + + y u _ + ym m m A dt d A − − Fiter m m A dt d A − − m m B A − K2 ∑ K1 Hukum Estimasi W2 W1 Uf ei ∑ U y + + + - U 15dimana L’s − = r m s L L L 2 ;L’r = ; 's r m L L L L’m r s m L L
τ
' = R’s s s L R ' = ; r r sy m r s r r r i L R Lψ
τ
ω
ω
τ
= ; = + . = − − = r x r r sy s s sx V L i L Vψ
τ
ω
' '(
s s r s r y)
s sy L i L V V = ' ω = ' ωψ(
s s s m)
sx x sx sx r m r r r V i L L L R dt di i L dt d = + − = + − = ' ' ' ' 1 τ ψ τ ψ dan y sy s sy L r sy r m r r V i R dt di J T i L L p J B dt d = − = − + − = ' 2 3 ψ ω ωGambar 3 Diagram blok pengontrol motor induksi putaran rendah Pengontrol fluks Umpan balik tak linear Pengontrol Putaran Voltage Kontrol PWM Inverter M Estimator r ∗ ψ sy ri ∗ ψ I*sx 16 17 18
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0 5 10 15 20 25 K e c e p a ta n ( p p m ) Waktu (detik)
Gambar 4. Pengaruh perubahan torsi beban pada putaran rotor 20 ppm pada motor dengan pengontrol yang diusulkan
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0 5 10 15 20 25 K e c e p a ta n ( p p m ) Waktu (detik)
Gambar 5. Pengaruh perubahan torsi beban pada motor dimana fluks rotor tidak dikontrol