BAB III
PERANCANGAN SISTEM
Pada bab ini akan dijelaskan perancangan dan realisasi dari perangkat keras dan perangkat lunak dari alat penggulung ulang kertas kasir untuk mini printer weighing indicator XK3190-A9 di CV Standard.
3.1. Gambaran Alat
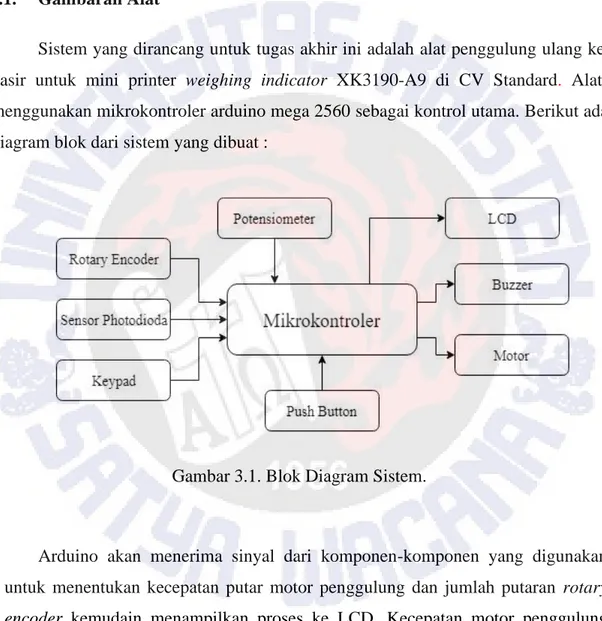
Sistem yang dirancang untuk tugas akhir ini adalah alat penggulung ulang kertas kasir untuk mini printer weighing indicator XK3190-A9 di CV Standard. Alat ini menggunakan mikrokontroler arduino mega 2560 sebagai kontrol utama. Berikut adalah diagram blok dari sistem yang dibuat :
Gambar 3.1. Blok Diagram Sistem.
Arduino akan menerima sinyal dari komponen-komponen yang digunakan untuk menentukan kecepatan putar motor penggulung dan jumlah putaran rotary encoder kemudain menampilkan proses ke LCD. Kecepatan motor penggulung sesuai dengan nilai yang diterima dari potensiometer. Sensor photodioda digunakan untuk mendeteksi apakah ada kertas yang akan digulung. Push button digunakan untuk memulai proses penggulungan dan emergency stop ketika terjadi kesalahan pada saat proses penggulungan kertas sedang berlangsung. Ketika sensor photodioda tidak mendeksi adanya kertas maka proses penggulungan kertas tidak dapat dimulai.
3.2. Perancangan Perangkat Keras
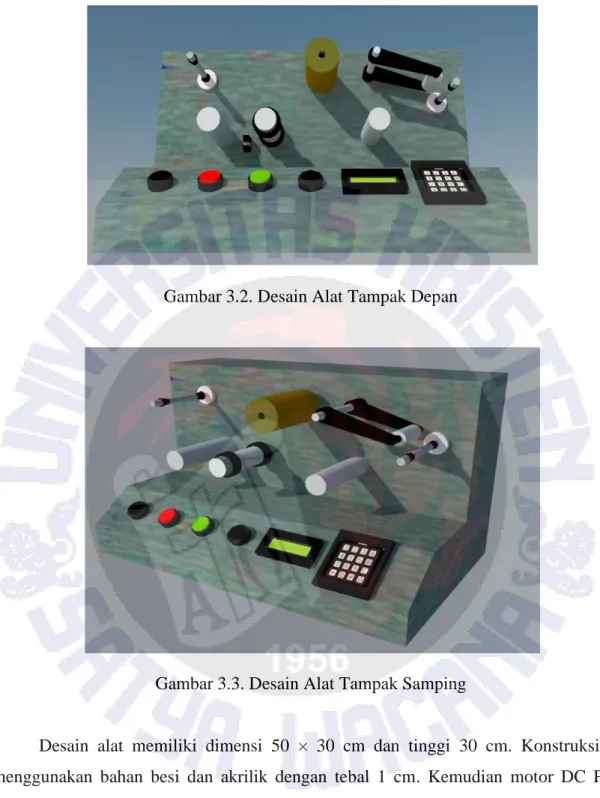
Gambar 3.2. Desain Alat Tampak Depan
Gambar 3.3. Desain Alat Tampak Samping
Desain alat memiliki dimensi 50 × 30 cm dan tinggi 30 cm. Konstruksi alat menggunakan bahan besi dan akrilik dengan tebal 1 cm. Kemudian motor DC PG28 sebagai penggulung kertas dan rotary encoder dengan roda berdiameter 6,7 cm untuk menghitung panjang kertas yang telah digulung. Kontroler utama alat penggulung kertas kasir menggunakan Arduino Mega 2560.
Gambar 3.4. Mekanik Rotary Encoder
Keterangan :
1. Stopper core gulungan kertas. 2. Sensor photodioda.
3. Stopper kertas. 4. Rotary encoder. 5. Saklar.
6. Push button stop. 7. Push button start. 8. Potensiometer. 9. LCD.
10. Keypad.
3.2.1. Kontrol Panel Alat
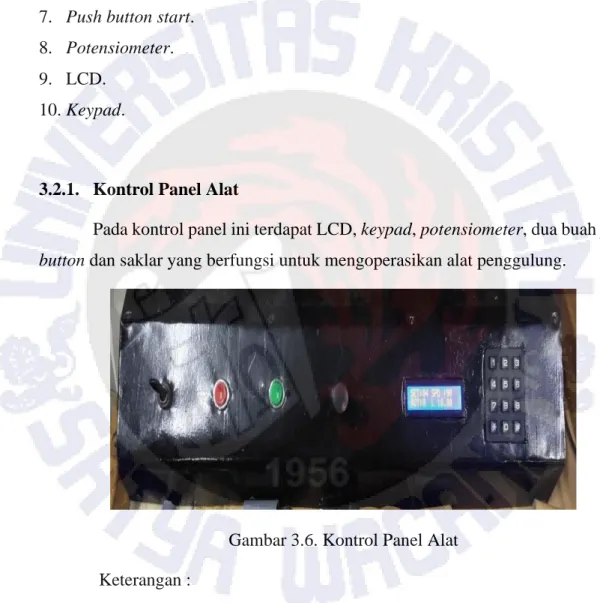
Pada kontrol panel ini terdapat LCD, keypad, potensiometer, dua buah push button dan saklar yang berfungsi untuk mengoperasikan alat penggulung.
Gambar 3.6. Kontrol Panel Alat Keterangan :
1. Push Button hijau berfungsi untuk memulai proses penggulungan kertas. 2. Push Button merah berfungsi untuk emergency stop ketika terdapat
kerusakan pada gulungan.
3. Potensiometer berfungsi untuk mengatur kecepatan motor penggulung. 4. Keypad berfungsi untuk memasukkan nilai setpoint.
5. LCD benfungsi untuk menampilkan nilai setpoint dan ukuran panjang kertas yang sudah digulung pada saat proses penggulungan sedang berlangsung.
6. Saklar berfungsi untuk on/off alat penggulung.
3.2.2. Jalur Kertas
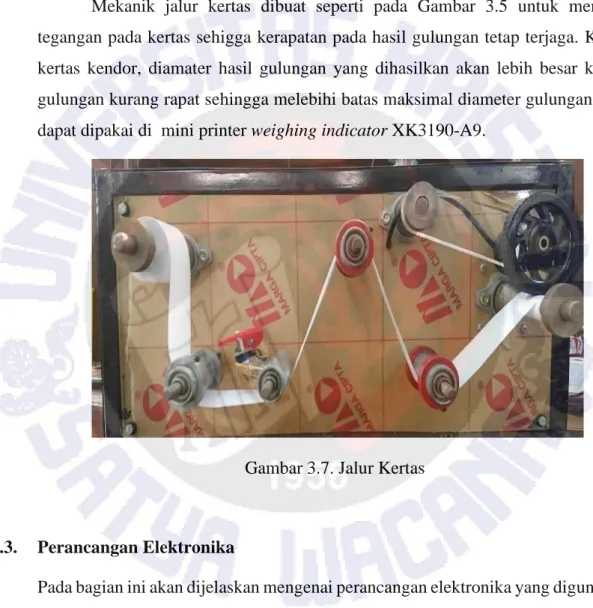
Mekanik jalur kertas dibuat seperti pada Gambar 3.5 untuk memberi tegangan pada kertas sehigga kerapatan pada hasil gulungan tetap terjaga. Ketika kertas kendor, diamater hasil gulungan yang dihasilkan akan lebih besar karena gulungan kurang rapat sehingga melebihi batas maksimal diameter gulungan yang dapat dipakai di mini printer weighing indicator XK3190-A9.
Gambar 3.7. Jalur Kertas
3.3. Perancangan Elektronika
Pada bagian ini akan dijelaskan mengenai perancangan elektronika yang digunakan dalam sistem yang akan dibuat. Perancangan elektronika dalam pembuatan skripsi ini terdiri dari bagian-bagian utama sebagai berikut:
1. Arduino Mega 2560. 2. Supply.
3. Rotary Encoder. 4. Potensiometer.
5. Photodioda. 6. Motor DC PG28.
3.3.1. Pengendali Utama
Pengendali Utama untuk sistem alat menggunakan Arduino mega 2560 sebagai pengendali utama pada sistem alat. Tugas dari mikrokontroler yaitu:
1. Mengolah data yang didapat dari komponen-komponen yang digunakan.
2. Menampilkan proses pada LCD.
3. Memberikan sinyal pada motor penggulung.
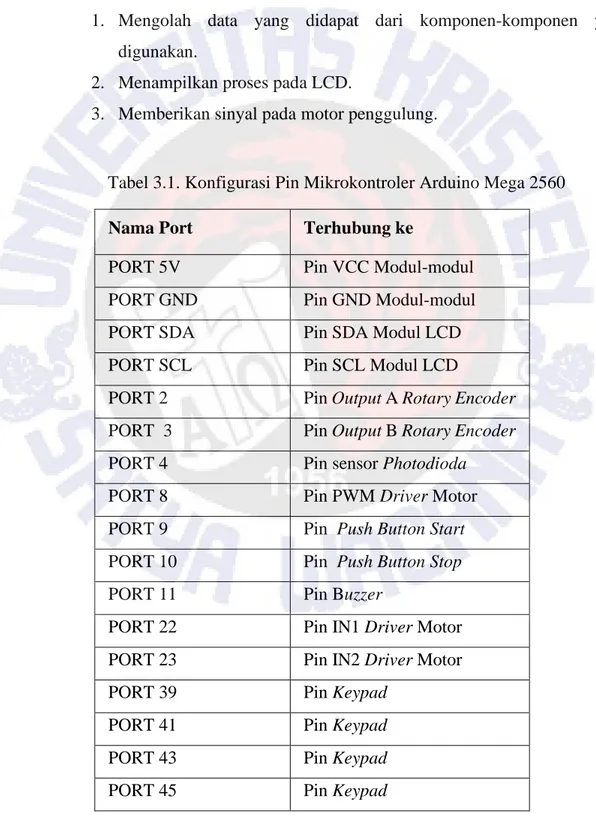
Tabel 3.1. Konfigurasi Pin Mikrokontroler Arduino Mega 2560
Nama Port Terhubung ke
PORT 5V Pin VCC Modul-modul
PORT GND Pin GND Modul-modul
PORT SDA Pin SDA Modul LCD
PORT SCL Pin SCL Modul LCD
PORT 2 Pin Output A Rotary Encoder PORT 3 Pin Output B Rotary Encoder
PORT 4 Pin sensor Photodioda
PORT 8 Pin PWM Driver Motor
PORT 9 Pin Push Button Start
PORT 10 Pin Push Button Stop
PORT 11 Pin Buzzer
PORT 22 Pin IN1 Driver Motor
PORT 23 Pin IN2 Driver Motor
PORT 39 Pin Keypad
PORT 41 Pin Keypad
PORT 43 Pin Keypad
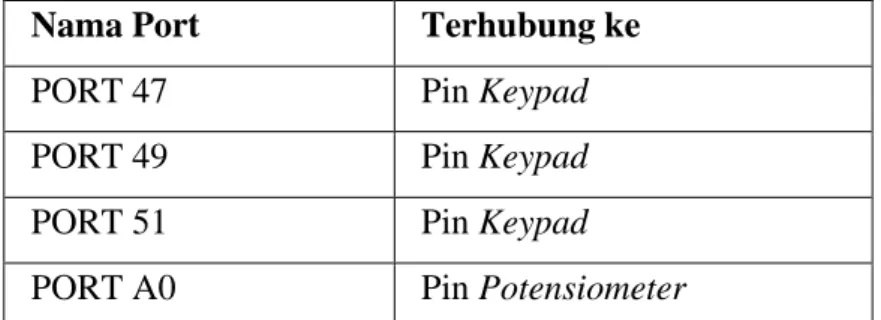
Nama Port Terhubung ke
PORT 47 Pin Keypad
PORT 49 Pin Keypad
PORT 51 Pin Keypad
PORT A0 Pin Potensiometer
3.3.2. Konfigurasi Arduino, LCD, Keypad, Push Button
Keypad digunakan untuk memasukkan nilai setpoint atau jumlah gulungan yang diinginkan, kemudian arduino akan membaca dan melakukan kondisi yang telah ditentukan. Proses penggulungan akan terlihat pada LCD. Push button digunakan untuk memulai dan mematikan proses penggulungan.
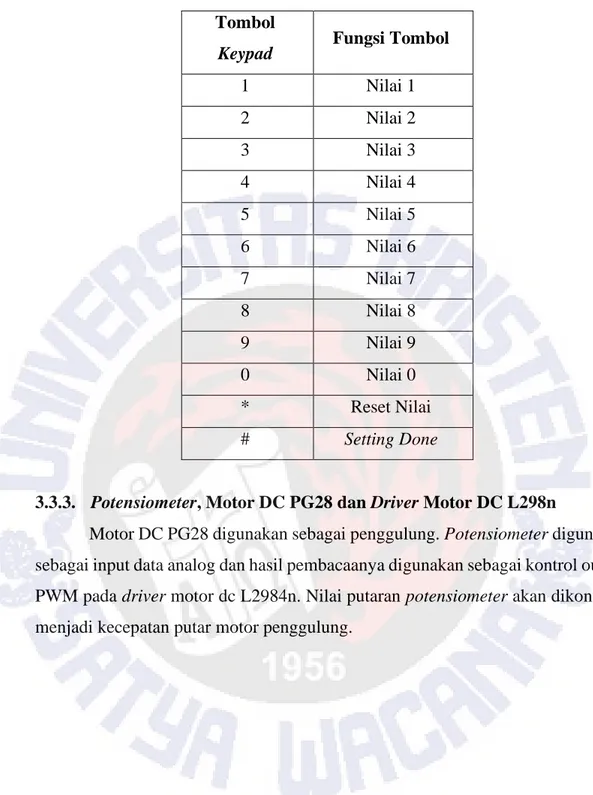
Tabel 3.2. Fungsi Tombol Keypad
Tombol
Keypad Fungsi Tombol
1 Nilai 1 2 Nilai 2 3 Nilai 3 4 Nilai 4 5 Nilai 5 6 Nilai 6 7 Nilai 7 8 Nilai 8 9 Nilai 9 0 Nilai 0 * Reset Nilai # Setting Done
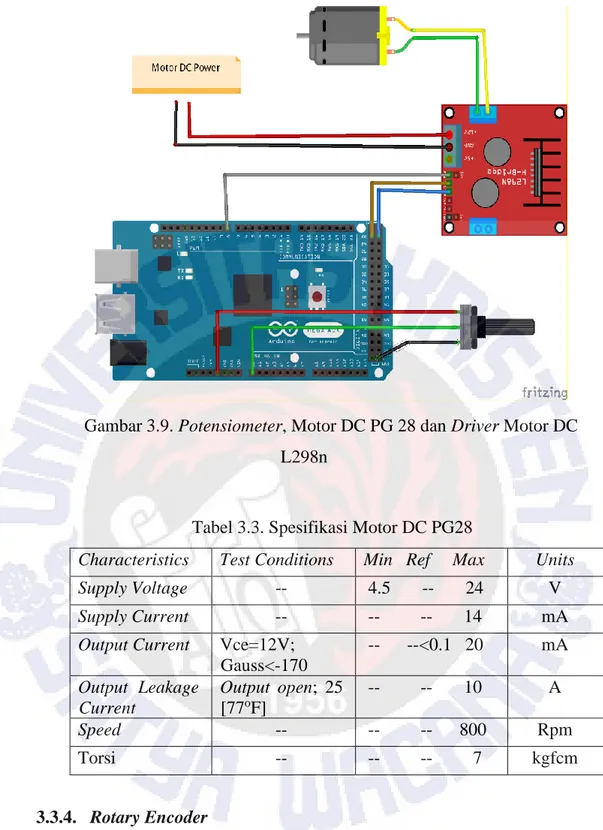
3.3.3. Potensiometer, Motor DC PG28 dan Driver Motor DC L298n
Motor DC PG28 digunakan sebagai penggulung. Potensiometer digunakan sebagai input data analog dan hasil pembacaanya digunakan sebagai kontrol output PWM pada driver motor dc L2984n. Nilai putaran potensiometer akan dikonversi menjadi kecepatan putar motor penggulung.
Gambar 3.9. Potensiometer, Motor DC PG 28 dan Driver Motor DC L298n
Tabel 3.3. Spesifikasi Motor DC PG28
Characteristics Test Conditions Min Ref Max Units Supply Voltage -- 4.5 -- 24 V Supply Current -- -- -- 14 mA Output Current Vce=12V;
Gauss<-170 -- --<0.1 20 mA Output Leakage Current Output open; 25 [77oF] -- -- 10 A Speed -- -- -- 800 Rpm Torsi -- -- -- 7 kgfcm 3.3.4. Rotary Encoder
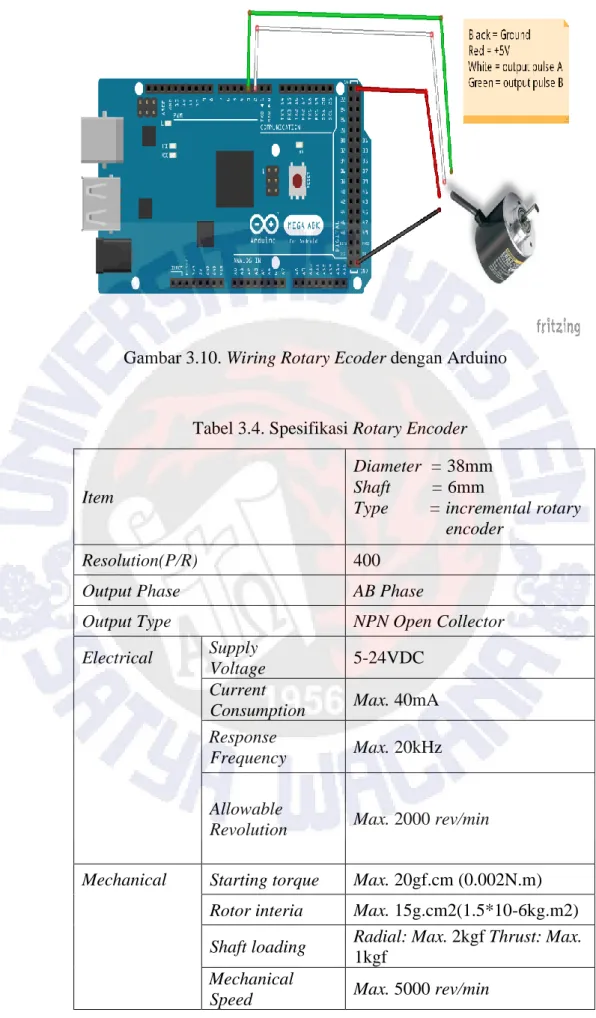
Rotary encoder berfungsi untuk mengirim sinyal ke arduino yang kemudian diterima dan diolah oleh arduino untuk menghitung panjang gulungan kertas atau jumlah putaran pada saat proses penggulungan kertas sedang berlangsung. Ketika jumlah putaran rotary encoder sudah sama dengan nilai setpoint maka proses penggulungan telah selesai.
Gambar 3.10. Wiring Rotary Ecoder dengan Arduino
Tabel 3.4. Spesifikasi Rotary Encoder
Item
Diameter = 38mm Shaft = 6mm
Type = incremental rotary encoder
Resolution(P/R) 400
Output Phase AB Phase
Output Type NPN Open Collector
Electrical Supply
Voltage 5-24VDC
Current
Consumption Max. 40mA Response
Frequency Max. 20kHz
Allowable
Revolution Max. 2000 rev/min
Mechanical Starting torque Max. 20gf.cm (0.002N.m) Rotor interia Max. 15g.cm2(1.5*10-6kg.m2) Shaft loading Radial: Max. 2kgf Thrust: Max.
1kgf Mechanical
3.3.5. Photodioda dan Buzzer
Photodioda berfungsi untuk mengirim sinyal ke arduino ketika ada kertas yang akan digulung. Ketika kertas yang akan digulung sudah habis, maka alat penggulung akan berhenti secara otomatis dan buzzer akan berbunyi. Buzzer juga akan berbunyi ketika proses penggulungan telah selesai dilakukan.
Gambar 3.11. Wiring Photodioda dan Buzzer
3.4. Perancangan Perangkat Lunak
Pada bagian ini dijelaskan mengenai perancangan perangkat lunak. Perancangan perangkat lunak yang dijelaskan adalah perangkat lunak mikrokontroler Arduino mega2560 serta pengolahan data dari sensor yang digunakan. Mikrokontroler Arduino mega 2560 diprogram agar bekerja sebagai pengendali sistem yang berfungsi melakukan komunikasi dengan rotary encoder, sensor photodioda, dan potensiometer untuk membaca data dan mengirimkan sinyal untuk menyalakan motor penggulung.
Berikut merupakan gambar dari diagram alir perangkat lunak pada skripsi yang dirancang oleh penulis ini :
Program dimulai dengan inisialisasi variabel – variabel, kemudian mikrokontroler membaca nilai setpoint yang dimasukkan menggunakan keypad, nilai rotary encoder, nilai sensor photodioda dan petensiometer lalu menampilkannya ke LCD.
Gambar 3.13. Source Tampilan Awal LCD
Tampilan LCD pada Saat Pengujian Rotary Encoder dapat dilihat pada Gambar 4.1, LCD menampilkan nilai setpoint, nilai putaran rotary encoder, speed, dan panjang kertas yang sudah tergulung.
Gambar 3.13. Source Rotary Encoder
Arduino menggerakkan motor sesuai dengan nilai data yang diterima. Pada saat putaran rotary encoder sudah sama dengan setpoint yang ditentukan maka motor penggulung akan berhenti dan buzzer akan berbunyi. Pada LCD akan tertampil proses selesai, setpoint dan nilai rotary encoder kembali menjadi nol.