i
PROTOTYPE SISTEM PENGENDALIAN TEMPERATUR DAN
PENGUKURAN KELEMBABAN PADA INKUBATOR BAYI
BERBASIS LOGIKA FUZZY
TUGAS AKHIR
Untuk memenuhi sebagian persyaratan untuk mencapai derajat Sarjana S-1
Program Studi Teknik Elektro
Disusun Oleh :
NOOR YULITA DWI SETYANINGSIH
E11.2010.00389
1.
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS DIAN NUSWANTORO
SEMARANG
MOTTO
♠ Tidak ada kata sia-sia dalam semua yang telah kita perjuangkan. ♠ Untuk mendapatkan sesuatu yang diinginkan harus ada perjuangan. ♠ Pengendalian diri begitu penting untuk menghadapi suatu rintangan
KATA PENGANTAR ﻢﻴﺣﺮﻟﺍ ﻦﻤﺣﺮﻟﺍ ﷲ ﻢﺴﺑ
Assalamu'alaikum Warahmatullahi Wabarakatuhu.
Puji syukur penulis panjatkan kehadirat Allah SWT yang telah melimpahkan segala rahmat hidayah-Nya sehinga penulis dapat menyelesaikan dan menyusun laporan tugas akhir yang dengan judul “Prototype Sistem Pengendalian Temperatur dan Pengukuran Kelembaban Pada Inkubator Bayi Berbasis Logika Fuzzy”.
Tugas Akhir ini disusun sebagai salah satu syarat untuk menyelesaikan pendidikan pada Program Studi S-1 Teknik Elektro Fakultas Teknik Universitas Dian Nuswantoro Semarang.
Terselesaikannya tugas akhir ini tidak lepas dari dukungan dan bantuan berbagai pihak. Untuk itu pada kesempatan ini penulis mengucapkan terima kasih kepada :
1. Bapak Dr. Ir. Edi Noersasongko, M.Kom selaku Rektor Universitas Dian Nuswantoro Semarang.
2. Bapak Dr.-Eng. Yuliman Purwanto, M.Eng selaku Dekan Fakultas Teknik Elektro.
3. Bapak M. Ary Heryanto, M.Eng selaku Sekretaris Dekan Fakultas Teknik Elektro.
4. Bapak Ir. Wisnu Adi P, M.Eng selaku Ketua Program Studi Teknik Elektro.
5. Bapak Ir. Wisnu Adi P, M.Eng selaku Dosen Pembimbing I Tugas Akhir. 6. Ibu Ir. Dian Retno Sawitri, M.T selaku Dosen Pembimbing II Tugas
Akhir.
7. Bapak dan Ibu Dosen Program Studi Studi S-1 Teknik Elektro Fakultas Teknik Universitas Dian Nuswantoro Semarang.
8. Papa mamaku tercinta yang selalu memberikan kasih sayang, do'a dan dukungan, baik spiritual maupun material.
9. Teman-teman transfer angkatan 2010 Teknik Elektro Universitas Dian Nuswantoro Semarang.
10. Semua pihak yang telah turut membantu terselesaikannya tugas akhir ini, yang tidak dapat penulis sebutkan satu persatu.
Semoga Allah SWT membalas segala budi baik dan amal mereka dengan pahala yang lebih besar dari apa yang telah mereka berikan kepada penulis.
Penulis menyadari bahwa dalam penulisan tugas akhir ini masih terdapat banyak kekurangan. Oleh karena itu, besar harapan penulis untuk menerima saran dan kritik dari para pembaca. Semoga tugas akhir ini dapat memberikan manfaat dan menambah pengetahuan bagi kita semua.
Wassalamu'alaikum Warahmatullahi Wabarakatuhu.
Semarang, Juli 2012
Penulis
ABSTRAKSI
Penelitian ini bertujuan untuk menghasilkan suatu “Prototype Sistem Pengendalian Temperatur dan Pengukuran Kelembaban Pada Inkubator Bayi Berbasis Logika Fuzzy”. Perangkat ini dibuat karena banyaknya inkubator yang masih memiliki sistem pengontrolan yang manual sehingga dalam penelitian ini membuat suatu sistem pengontrolan yang otomatis sesuai dengan kebutuhan bayi .
Dari permasalahan yang ada sehingga dibuat suatu sistem yang memodelkan kebutuhan temperatur inkubator bayi yang bersifat fuzzy dan mengaplikasikan metode fuzzy logic controller pada inkubator bayi sehingga temperaturnya dapat memenuhi kebutuhan bayi yang menggunakannya.
Pengendalian temperatur dan pengukuran kelembaban pada inkubator bayi ini memanfaatkan sensor SHT11, mikrokontroler ATMega8535, Lampu , Kipas, LCD dan Keypad. Data temperatur dan kelembaban yang terukur pada sensor akan diolah pada mikrokontroler untuk mengendalikan nyala lampu dan kipas dalam mempertahankan temperatur yang dibutuhkan dalam incubator bayi tersebut.
Dari penelitian yang dilakukan didapatkan bahwa sistem pengendalian temperatur menggunakan logika fuzzy mendapatkan data yang linier antara data Setting Point dan data hasil pengontrolan menggunakan metode fuzzy , dengan nilai eror 0.06.
Kata Kunci : inkubator bayi, sensor SHT11, Fuzzy Logic Tsukamoto , mikrokontroler ATMega 8535
.
DAFTAR ISI HALAMAN JUDUL ... i PERNYATAAN ... ii PENGESAHAN ... iii MOTTO ... iv KATA PENGANTAR ... v ABSTRAKSI ... vii
DAFTAR ISI ... viii
DAFTAR GAMBAR ... xi
DAFTAR TABEL ... xiii
DAFTAR LAMPIRAN ... xiv
BAB I PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Perumusan Masalah ... 2 1.3 Tujuan Penelitian ... 2 1.4 Batasan Masalah ... 3 1.5 Manfaat Penelitian ... 3 1.6 Sistematika Laporan ... 4
BAB II TINJAUAN PUSTAKA ... 5
2.1 Metode Fuzzy logic Controller ... 6
2.2 SHT11 ... 12
2.3 Mikrokontroler ATMega8535 ... 12
2.4 Keadaan Bayi ... 13
BAB III METODE PENELITIAN ... 16
BAB IV PERANCANGAN ... 19
4.1 Rancangan Penelitian ... 19
4.1.1 Perancangan Hardware ... 19
4.1.1.1 Perancangan LCD ... 20
4.1.1.2 Perancangan Keypad ... 20
4.1.1.3 Perancangan Driver Triac untul Lampu ... 22
4.1.1.4 Perancangan Dimmer untuk Kipas ... 23
4.1.1.5 Perancangan Sensor SHT11 ... 24
4.1.1.6 Perancangan Sistem Minimum Mikrokontroler .. 24
4.1.1.7 Dimensi Inkubator ... 25
4.1.2 Perancangan Software ... 26
4.1.3 Perancangan Fuzzy Logic ... 28
4.1.3.1 Unit Fuzzyfikasi ... 28
4.1.3.2 IF-THEN rule ... 32
4.1.3.3 Mekanisme Pertimbangan Fuzzy ... 32
4.2 Pengujian ... 34
4.2.1 Pengujian sensor SHT11 ... 34
4.2.2 Pengujian Sistem Keseluruhan ... 35
4.2.3 Pengujian Fuzzy Logic pada Sistem ... 36
BAB V HASIL DAN PEMBAHASAN ... 37
5.1 Pengujian Sensor SHT11 ... 37
5.2 Pengujian Sistem Secara Keseluruhan ... 41
5.3 Pengujian Fuzzy Logic pada Sistem ... 53
BAB VI PENUTUP ... 63 6.1 Kesimpulan ... 63 6.2 Saran ... 63 DAFTAR PUSTAKA ... 64 LAMPIRAN ix x
DAFTAR GAMBAR
Gambar 2.1 Representasi Linier Naik ... 7
Gambar 2.2 Representasi Linier Turun ... 8
Gambar 2.3 Kurva Segitiga ... 9
Gambar 2.4 Kurva Trapesium ... 9
Gambar 2.5 Fuzzy Controler ... 10
Gambar 2.6 Fungsi Implikasi MIN ... 11
Gambar 2.7 Inferensi dengan menggunakan Metode Tsukamoto ... 11
Gambar 4.1 Blok Diagram Sistem Keseluruhan ... 19
Gambar 4.2 Rangkaian LCD ... 21
Gambar 4.3 Bentuk Keypad 3x4 ... 21
Gambar 4.4 Driver TRIAC MOC3020 ... 22
Gambar 4.5 Rangkaian Kipas ... 23
Gambar 4.6 Sensor SHT11 ... 24
Gambar 4.7 Sistem Minimum Mikrokontroler ... 25
Gambar 4.8 Dimensi Inkubator ... 26
Gambar 4.9 flowchart prototype sistem pengendalian temperatur dan kelembaban pada inkubator bayi berbasis logika fuzzy………….27
Gambar 4.10 Fungsi keanggotaan eror ... 29
Gambar 4.11 Fungsi keanggotaan d_eror ... 30
Gambar 4.12 Fungsi keanggotaan lampu ... 31
Gambar 4.13 Fungsi keanggotaan kipas ... 32
Gambar 4.14 Matriks rule sistem ... 33
Gambar 4.15 Proses Defuzzyfikasi Metode Tsukamoto ... 34
Gambar 4.16 Diagram Blok Pengujian SHT11 ... 34
Gambar 4.17 Skema Pengujian Sistem Keseluruhan ... 35
Gambar 5.1 Diagram Blok Pengujian Sensor SHT11 ... 38
Gambar 5.2 Grafik Data Temperatur ... 39
Gambar 5.3 Grafik Data Kelembaban ... 40
Gambar 5.4 Skema Pengujian Sistem Keseluruhan ... 41
Gambar 5.5 Grafik Temperatur Pengujian 1 ... 44
Gambar 5.6 Grafik Temperatur Pengujian 2 ... 44
Gambar 5.7 Grafik Temperatur Pengujian 3 ... 45
Gambar 5.8 Grafik rata-rata Pengujian Temperatur ... 45
Gambar 5.9 Grafik Pengujian 1 {°C dan %RH} ... 47
Gambar 5.10 Grafik Pengujian 2 {°C dan %RH} ... 47
Gambar 5.11 Grafik Pengujian 3 {°C dan %RH} ... 48
Gambar 5.12 Grafik Pengujian rata-rata Temperatur dan Kelembaban ... 48
DAFTAR TABEL
Tabel 2.1 Pengaturan suhu inkubator ... 14
Tabel 4.1 Tabel Pengujian Temperatur ... 36
Tabel 4.2 Tabel Pengujian Temperatur dan Kelembaban ... 36
Tabel 5.1 Tabel Pengujian Temperatur ... 38
Tabel 5.2 Tabel Pengujian Kelembaban ... 40
Tabel 5.3 Data Pengujian Setting Point dan Present Value Temperatur ... 43
Tabel 5.4 Data Pengujian antara Temperatur dan Kelembaban ... 46
Tabel 5.5 Pengujian pagi dengan handuk dingin , suhu ruang = 28°C ... 50
Tabel 5.6 Pengujian pagi dengan handuk panas , suhu ruang = 28°C ... 50
Tabel 5.7 Pengujian pagi dengan handuk dingin , suhu ruang = 31°C ... 50
Tabel 5.8 Pengujian pagi dengan handuk panas , suhu ruang = 31°C ... 51
Tabel 5.9 Pengujian pagi dengan handuk dingin , suhu ruang = 29°C ... 51
Tabel 5.10 Pengujian pagi dengan handuk panas , suhu ruang = 29°C ... 51
Tabel 5.11 Data rata2 handuk dingin dari ke-3 kondisi ... 52
Tabel 5.12 Data rata2 handuk panas dari ke-3 kondisi ... 52
Tabel 5.13 Data pengujian sistem selama 60 menit... 53
Tabel 5.15 Keluaran Sistem Fuzzyfikasi ... 62
DAFTAR LAMPIRAN
1. Listing Program ... 65
BAB I
PENDAHULUAN
1.1 Latar Belakang
Bayi yang baru lahir membutuhkan waktu untuk beradaptasi dengan dunia luar, sedangkan saat paling rawan bagi bayi adalah saat setelah bayi baru lahir, karena membutuhkan perhatian khusus terutama lingkungan sekitar.
Dalam hal ini inkubator bayi adalah salah satu alat yang bisa membantu bayi baru lahir untuk beradaptasi dengan lingkungan sekitar, sebab kondisi dalam kandungan sangat berbeda dengan kondisi lingkungan sekitar di luar kandungan. Selain itu juga berfungsi menjaga suhu ruang supaya tetap stabil. Bayi prematur pada umumnya perlu diletakkan di inkubator yang mempunyai kontrol suhu, sehingga bayi tetap berada pada suhu yang sesuai seperti saat bayi berada dalam kandungan. Faktor –faktor yang perlu diperhatikan pada inkubator adalah temperatur inkubator dan kelembaban pada ruang inkubator bayi. Untuk itu perlu dibuat suatu alat pengontrol temperatur ruangan inkubator, agar dapat mempertahankan temperatur dalam batas normal antara 36 ºC – 38 ºC [ 1 ].
Kurangnya jumlah inkubator bayi di puskesmas atau tempat bersalin yang berada di daerah-daerah karena harga inkubator yang cukup tinggi, menyebabkan turunnya kualitas pelayanan dalam perawatan bayi baru lahir. Oleh karena itu perlu direalisasikan adanya inkubator dengan harga terjangkau (tanpa mengurangi fungsi dasarnya), sehingga inkubator tersebut dapat digunakan untuk semua kalangan dan diharapkan turut mengurangi AKB (Angka Kematian Bayi) di Indonesia.
Aktivitas bayi antara bayi yang bergerak dan diam membutuhkan tingkat temperatur dan kelembaban yang berbeda. Misalkan pada bayi yang diam, akan membutuhkan temperatur yang lebih hangat di bandingkan dengan bayi yang banyak bergerak. Sehingga dalam inkubator bayi, naik turunnya temperatur disesuaikan dengan kebutuhan bayi. Berdasarkan kebutuhan tersebut inkubator bayi yang dapat disesuaikan dengan kebutuhan bayi dengan mengaplikasikan fuzzy logic controller untuk mengendalikannya.
Dalam sistem ini juga dikembangakan mengenai pengukuran kelembaban agar sistem pernafasan bayi tetap optimal. Dengan memanfaatkan sensor SHT 11 untuk pengukuran temperatur dan kelembaban yang memiliki tingkat kelinieran data yang baik serta mikrokontroler ATmega 8535 yang sangat fleksibel untuk berbagai aplikasi program dan harga yang terjangkau, maka dapat direalisasikan sebuah sistem pengendalian temperatur inkubator bayi.
1.2 Perumusan Masalah
Perumusan masalah dalam pembuatan alat ini yaitu :
• Bagaimana memodelkan kebutuhan temperatur pada inkubator bayi yang bersifat fuzzy (tidak tegas).
• Bagaimana mengaplikasikan metode fuzzy logic controller pada inkubator bayi sehingga temperatur dapat memenuhi kebutuhan bayi yang menggunakannya.
1.3 Tujuan Penelitian
Tujuan dari perancangan ini adalah :
• Memodelkan kebutuhan temperatur inkubator bayi yang bersifat fuzzy (tidak tegas).
• Mengaplikasikan metode fuzzy logic controller pada inkubator bayi sehingga temperaturnya dapat memenuhi kebutuhan bayi yang menggunakannya.
1.4 Batasan Masalah
Pada sistem yang akan dibuat nanti, kami membatasi dalam beberapa hal sebagai berikut:
• Menggunakan tampilan LCD agar hasil pengukuran suhu dan kelembaban mudah di baca.
• Menggunakan sensor SHT 11 untuk pengukuran suhu dan kelembaban.
• Mengunakan lampu sebagai pemanas.
• Menggunakan kipas DC untuk mengatur sirkulasi udara masuk dan keluar, juga untuk mengatur kelembaban dan udara panas yang dialirkan..
• Menggunakan mikrokontroller AVR ATMEGA8535 sebagai kontroler utama.
• Range kontrol temperatur ruang inkubator bayi 31o
C – 38o C • Kelembaban relative : 50% RH – 60% RH.
• Pemilihan bahan yang awet dan murah. 1.5 Manfaat Penelitian
1. Bagi Peneliti
Dapat digunakan sebagai penyalur ilmu-ilmu teori yang didapat selama bangku kuliah.
2. Bagi Instansi
Sebagai tambahan referensi akademik pada perpustakaan Universitas Dian Nuswantoro Semarang, serta dapat digunakan sebagai perbandingan untuk penelaah yang serupa bagi peneliti selanjutnya. 3. Bagi Pengguna
Mengembangkan peralatan inkubator bayi dengan pengontrolan yang lebih baik lagi.
1.6 Sistematika Laporan
Sistematika yang digunakan dalam laporan Tugas Akhir ini adalah sebagai berikut:
BAB I PENDAHULUAN
Berisi tentang latar belakang, perumusan masalah, tujuan penelitian, batasan masalah, manfaat penelitian dan sistematika penulisan laporan.
BAB II TINJAUAN PUSTAKA
Berisi tentang teori – teori yang diberkaitan dalam penelitian ini.
BAB III METODE PENELITIAN
Berisi tentang langkah- langkah melakukan penelitian.
BAB IV PERANCANGAN
Berisi tentang perancangan hardware dan Software dalam melakukan penelitian.
BAB V HASIL dan PEMBAHASAN
Berisi tentang hasil perancangan alat dan pengujian dari tiap bagian dan keselruhan sistem yang digunakan.
BAB VI PENUTUP
Berisi kesimpulan dan saran yang berkaitan dengan seluruh proses perancangan dan pembuatan tugas akhir ini serta penyelesaian laporannya.
DAFTAR PUSTAKA LAMPIRAN-LAMPIRAN
BAB II
TINJAUAN PUSTAKA
Perkembangan pada dunia kesehatan khususnya untuk inkubator bayi semakin canggih untuk memenuhi kebutuhan bayi sesuai dengan keadaan bayi sewaktu masih dalam kandungan. Perkembangan dari inkubator bayi ini tidak hanya dari segi bentuk, pelayanan yang disediakan, tapi juga dalam sistem pengontrolan temperatur yang ada dalam inkubator bayi.
Penelitian untuk tugas akhir ini mengacu pada penelitian sebelumnya yang terkait dengan inkubator bayi untuk dilakukan pengembangan. Adapun penelitian sebelumnya seperti pada [2] dan [3]. Dari penelitian yang sudah dilakukan oleh [2], sistem pengendalian pada inkubator itu menggunakan sensor LM35 untuk pendeteksian temperatur, sensor HSM 20G untuk pendeteksian dari kelembaban, menggunakan AT89S51 untuk pengolahan data dan lampu sebagai pemanas, serta kipas sebagai pendingin. Sedangkan penelitian yang dilakukan oleh [3] sistem pengendaliannya menggunakan metode fuzzy logic, dengan sensor LM335 untuk pendeteksi temperatur, AT89S51 untuk pengolahan data dan lampu sebagai pemanas, serta kipas sebagai pendingin.
Dari kedua penelitian yang sudah ada, penulis melakukan pengembangan dalam sistem inkubator bayi, dimana dalam sistem ini menggunakan sensor SHT 11 yang memiliki data linier antara temperatur dan kelembabannya, mikrokontroler ATmega8535 untuk pengolahan data, lampu sebagai pemanas dan
kipas sebagai pendingin sekaligus sebagai sirkulasi udara. Data hasil dari SP (Set Point) temperatur serta data hasil PV (Present Value) dari temperatur dan kelembaban akan ditampilkan pada LCD. Range temperatur yang digunakan dari 31ºC - 38ºC dan range kelembaban dari 50% RH – 60% RH. Pada penelitian tugas akhir ini ditekankan pada sistem kontrol temperatur pada inkubator bayi menggunakan metode fuzzy logic tsukamoto.
2.1 Metode Fuzzy Logic Controller
Pada tugas akhir ini metode pengontrolan yang digunakan adalah fuzzy logic tsukamoto. Fuzzy logic adalah suatu cara yang tepat untuk memetakan suatu ruang input ke dalam suatu ruang output.Beberapa alasan menggunakan Fuzzy logic yaitu:
1. logika fuzzy sangat fleksibel.
2. konsep logika fuzzy mudah dimengerti.
3. Mampu memodelkan fungsi-fungsi nonlinier yang sangat kompleks. 4. Dapat bekerjasama dengan teknik-teknik kendali secara konvensional. 5. memiliki toleransi terhadap data-data yang tidak tepat [4].
Pemilihan menggunakan metode fuzzy logic tsukamoto ini karena memiliki aturan yang cukup sederhana untuk mendapatkan hasil akhir. Pada metode tsukamoto, setiap konsekuen pada aturan yang berbentuk IF-Then harus direpresentasikan dengan suatu himpunan fuzzy dengan fungsi keanggotaan yang monoton. Sebagai hasilnya, output hasil inferensi dari tiap-tiap aturan diberikan
secara tegas (crisp) berdasarkan α-predikat. Hasil akhirnya diperoleh dengan menggunakan rata-rata terbobot [4].
Dalam metode fuzzy tsukamoto yang dilakukan pertama adalah menentukan fungsi keanggotaan (membership function), dimana fungsi keanggotaan ini merupakan kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaanya yang memiliki interval antara 0 sampai 1. Salah satu cara yang dapat digunakan untuk mendapatkan nilai keanggotaan adalah dengan melalui pendekatan fungsi. Adapun beberapa fungsi yang dapat digunakan yaitu :
1. Representasi linier
Dimana pada representasi linier, pemetaan input ke derajat keanggotaanya digambarkan sebagai suatu garis lurus. Bentuk ini paling sederhana dan menjadi pilihan yang baik untuk mendekati suatu konsep yang kurang jelas. Ada 2 keadaan himunan fuzzy yang linier yaitu representasi linier naik yang bisa di lihat pada gambar 2.1 dan representasi linier turun yang bisa di lihat pada gambar 2.2.
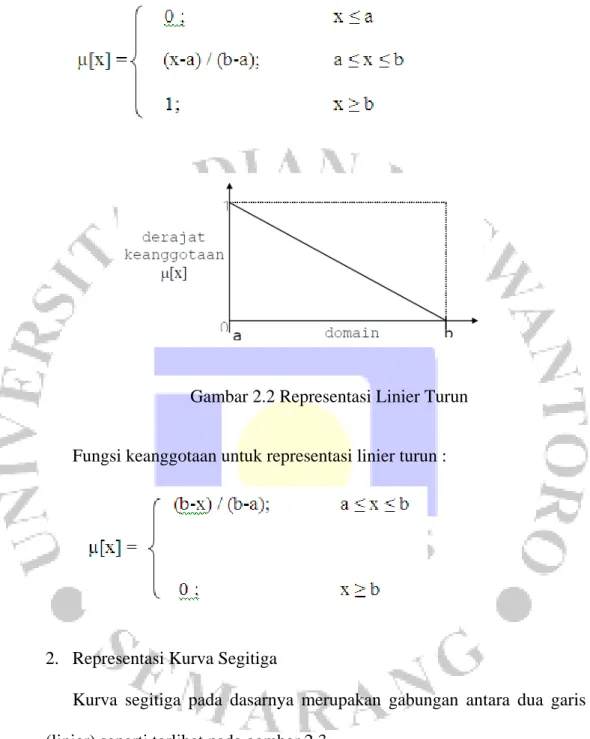
Fungsi keanggotaan untuk representasi linier naik :
Gambar 2.2 Representasi Linier Turun
Fungsi keanggotaan untuk representasi linier turun :
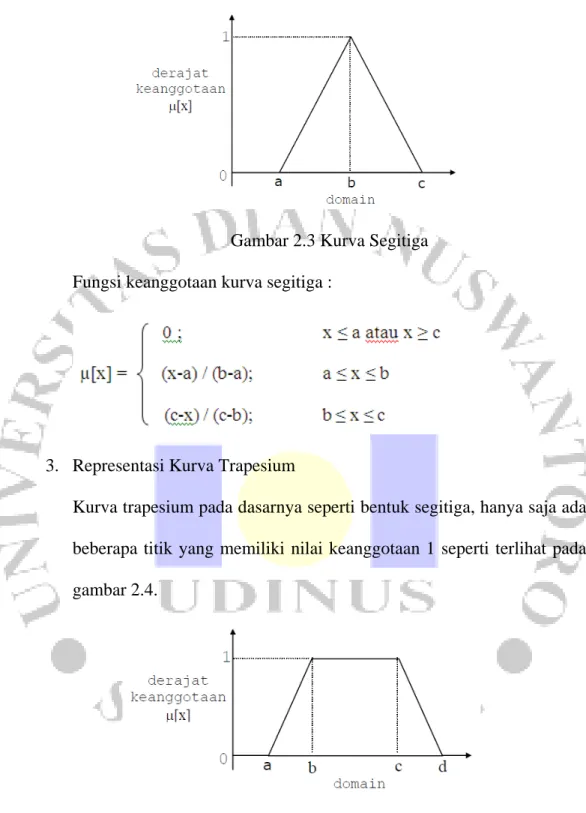
2. Representasi Kurva Segitiga
Kurva segitiga pada dasarnya merupakan gabungan antara dua garis (linier) seperti terlihat pada gambar 2.3.
Gambar 2.3 Kurva Segitiga Fungsi keanggotaan kurva segitiga :
3. Representasi Kurva Trapesium
Kurva trapesium pada dasarnya seperti bentuk segitiga, hanya saja ada beberapa titik yang memiliki nilai keanggotaan 1 seperti terlihat pada gambar 2.4.
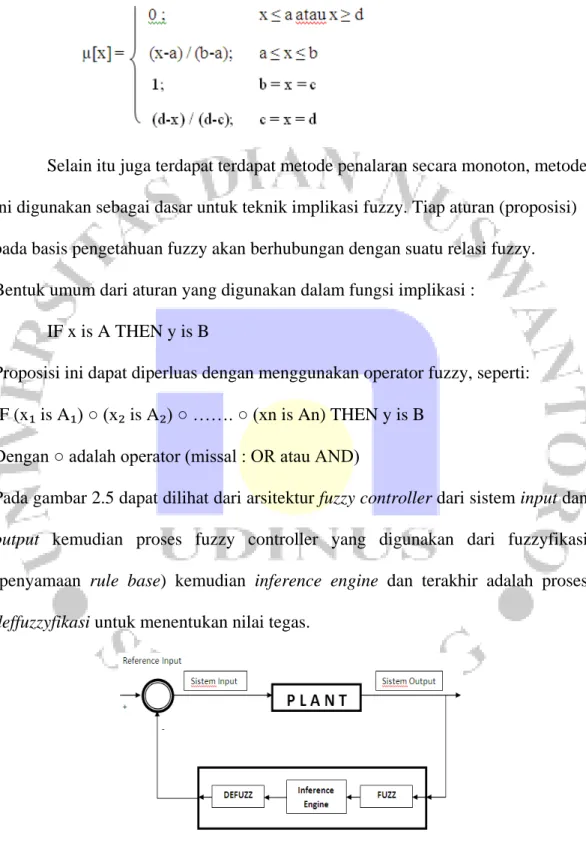
Fungsi keanggotaan kurva trapesium:
Selain itu juga terdapat terdapat metode penalaran secara monoton, metode ini digunakan sebagai dasar untuk teknik implikasi fuzzy. Tiap aturan (proposisi) pada basis pengetahuan fuzzy akan berhubungan dengan suatu relasi fuzzy. Bentuk umum dari aturan yang digunakan dalam fungsi implikasi :
IF x is A THEN y is B
Proposisi ini dapat diperluas dengan menggunakan operator fuzzy, seperti: IF (x₁ is A₁) ○ (x₂ is A₂) ○ ……. ○ (xn is An) THEN y is B
Dengan ○ adalah operator (missal : OR atau AND)
Pada gambar 2.5 dapat dilihat dari arsitektur fuzzy controller dari sistem input dan output kemudian proses fuzzy controller yang digunakan dari fuzzyfikasi (penyamaan rule base) kemudian inference engine dan terakhir adalah proses deffuzzyfikasi untuk menentukan nilai tegas.
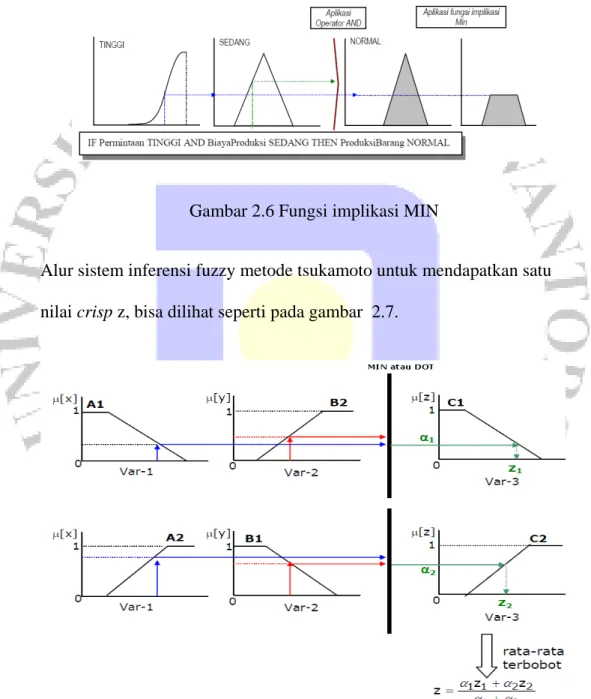
Fungsi implikasi yang digunakan pada metode tsukamoto adalah fungsi Min (minimum). Fungsi ini akan memotong output himpunan fuzzy. Gambar 2.6 menunjukkan salah satu contoh penggunaan fungsi min.
Gambar 2.6 Fungsi implikasi MIN
Alur sistem inferensi fuzzy metode tsukamoto untuk mendapatkan satu nilai crisp z, bisa dilihat seperti pada gambar 2.7.
2.2 SHT11
Pada tugas akhir ini menggunakan sensor SHT 11, karena sensor ini merupakan sensor digital untuk temperatur sekaligus kelembaban. Modul sensor ini sudah memiliki keluaran digital dan sudah terkalibrasi, sehingga tidak perlu lagi melakukan konversi A/D. penggunaan daya yang rendah, sangat baik untuk stabilitas jangka panjang.
2.3 Mikrokontroler ATmega8535
Penggunaan mikrokontroler ATmega 8535 pada sistem karena memiliki beberapa kelebihan dibandingkan dengan mikrokontroler AT89S51, dimana kecepatan AVR dua belas kali lebih cepat disbanding kecepatan MCS51. Adapun kelebihan dari ATmega 8535 diantaranya :
1. 8 bit VR berbasis RISC dengan performa tinggi dan konsumsi daya rendah.
2. Kecepatan maksimal 16MHz.
3. Terdapat 3 memori didalamnya diantaranya: a. 8KB Flash.
b. 512 byte SRAM. c. 512 byte EEPROM. 4. Timer/counter:
a. 2 buah 8 bit timer/counter. b. 1 buah 16 bit timer/counter. c. 4 kanal PWM.
5. 8 kanal 10/8 bit ADC.
6. Programmable Serial USART. 7. Memiliki komparator analog.
9. Memiliki 32 jalur I/O yang bias di program [5]. 2.4 Keadaan Bayi
Setelah bayi lahir ia akan berada di tempat yang suhunya lebih rendah dari dalam kandungan dan dalam keadaan basah. Apabila bayi tersebut dibiarkan dalam suhu kamar 25 °C, maka bayi akan kehilangan panas melalui radiasi, konveksi dan evaporasi. Dalam waktu yang bersamaan pembentukan panas yang bisa dihasilkan hanya sepersepuluh dari panas yang hilang, keadaan ini akan menyebabkan penurunan suhu tubuh bayi tersebut. Apabila keadaan ini tidak ditangani secara baik maka akan terjadi perubahan-perubahan pada bayi tersebut terutama bayi dengan berat bayi lahir rendah. Dalam keadaan normal suhu bayi dipertahankan 36- 37,5°C.
Kesanggupan untuk pembentukan panas dan kemampuan untuk mempertahankan panas sangat terbatas terutama pada bayi prematur. Keadaan ini dapat dihindari dengan segera mengeringkan bayi agar kehilangan panas secara evaporasi dapat dikurangi. Dalam perawatan selanjutnya usaha untuk mempertahankan suhu tubuh dalam Neutral thermal zone adalah salah satu cara yang paling efektif untuk menekan mortalitas bayi prematur.
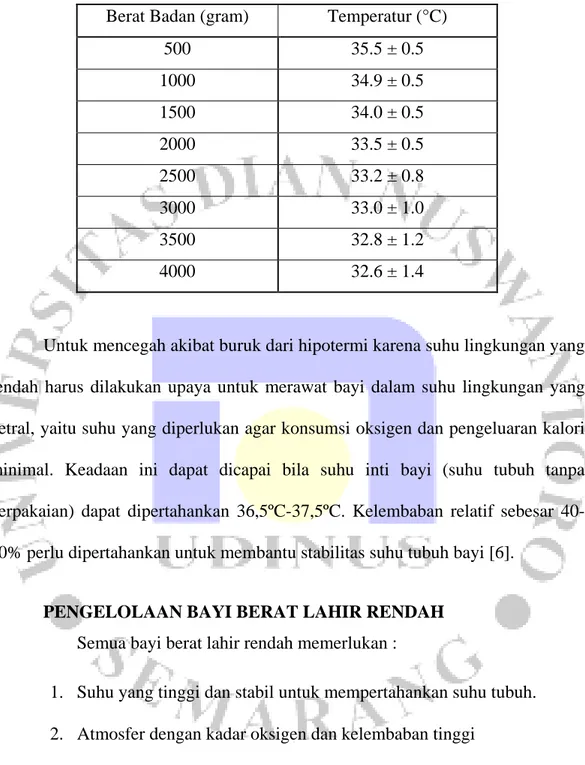
Dengan kata lain kita mengusahakan mempertahankan suhu rectal bayi menetap pada 37°C dengan merubah suhu sekitarnya dengan cara memberi pakaian lebih tebal, memberi heater dan kalau fasilitas memungkinkan adalah penggunaan inkubator . pengaturan suhu inkubator terlihat pada tabel 2.1[1].
Tabel 2.1 Pengaturan suhu inkubator Berat Badan (gram) Temperatur (°C)
500 35.5 ± 0.5 1000 34.9 ± 0.5 1500 34.0 ± 0.5 2000 33.5 ± 0.5 2500 33.2 ± 0.8 3000 33.0 ± 1.0 3500 32.8 ± 1.2 4000 32.6 ± 1.4
Untuk mencegah akibat buruk dari hipotermi karena suhu lingkungan yang rendah harus dilakukan upaya untuk merawat bayi dalam suhu lingkungan yang netral, yaitu suhu yang diperlukan agar konsumsi oksigen dan pengeluaran kalori minimal. Keadaan ini dapat dicapai bila suhu inti bayi (suhu tubuh tanpa berpakaian) dapat dipertahankan 36,5ºC-37,5ºC. Kelembaban relatif sebesar 40-60% perlu dipertahankan untuk membantu stabilitas suhu tubuh bayi [6].
PENGELOLAAN BAYI BERAT LAHIR RENDAH Semua bayi berat lahir rendah memerlukan :
1. Suhu yang tinggi dan stabil untuk mempertahankan suhu tubuh. 2. Atmosfer dengan kadar oksigen dan kelembaban tinggi
3. Pemberian minum secara hati-hati karena ada kecenderungan terisapnya susu ke paru.
4. Perlindungan terhadap infeksi
Dengan persyaratan seperti diatas maka bayi harus di rawat di unit khusus Rumah Sakit yang memiliki peralatan lengkap, dirawat oleh staf perawatan yang telah dilatih dalam bidang ini. Bayi paling kecil yang beratnya kurang dari 2000 gram di rawat telanjang dalam inkubator pada suhu 32-35 °C ( 90-95°F ) dengan kelembaban tinggi, tetapi bayi yang lebih besar dirawat di boks pada suhu 27°C ( 80°F ) [7].
BAB III
METODE PENELITIAN
Metodologi yang digunakan untuk menyelesaikan penelitian ini yaitu : 1. Metode Studi Literatur
Metode ini dilakukan dengan cara melihat dan mencari literatur yang sudah ada untuk memperoleh data serta informasi yang berhubungan dengan pengendalian temperatur pada inkubator bayi.
Dalam hal ini penulis mencari literatur yang berhubungan tentang penelitian terdahulu yang sejenis diantaranya, driver TRIAC, sensor SHT11, mikrokontroler ATmega 8535, LCD, keypad, kebutuhan bayi, metode fuzzy logic tsukamoto.
2. Metode Observasi
Metode ini dilakukan dengan melakukan penelitian dan mempelajari peralatan yang sudah ada untuk memberikan gambaran yang jelas sehingga dapat dipakai sebagai acuan dalam perencanaan dan pembuatan alat.
3. Metode Rekayasa Prototype
Metode ini digunakan sebagai sumber data dalam menganalisa dan mengambil data. Adapun perancangan hardware meliputi perancangan LCD, keypad, kipas, lampu, sensor SHT11, sistem minimum mikrokontroler ATmega 8535.
Dan perancangan software menggunakan fuzzy logic yang direalisasikan dalam program bahasa BASIC.
4. Metode Pembuatan Perangkat Keras dan Perangkat Lunak
Metode ini digunakan untuk membuat dan merealisasikan perancangan hardware dan software yang mendukung penyelesaian tugas akhir ini yaitu prototype sistem pengendalian temperatur dan pengukuran kelembaban pada inkubator bayi berbasis logika fuzzy.
5. Metode Pengujian dan Analisis
Metode ini digunakan untuk melakukan pengujian peralatan yang telah dibuat dan menganalisa hasil yang didapat dengan membandingkan antara rancangan dengan hasil yang telah didapat.
Pengujian yang dilakukan pada penelitian ini yaitu: • Pengujian sensor SHT11
Pengujian kali ini dilakukan dengan cara membandingkan hasil temperatur yang terbaca oleh sensor SHT 11 dengan alat terukur Thermo-Hygrometer.
• Pengujian sistem secara keseluruhan
Pengujian ini dilakukan dengan cara menghubungkan semua rangkaian yang dibutuhkan pada penelitian menjadi satu, yaitu rangkaian sensor SHT11, rangkaian catu daya, rangkaian sistem minimum mikrokontroler ATMega 8535, rangkaian lampu, rangkaian kipas dan rangkaian LCD.
Pengujjian dilakukan dengan menentukan nilai eror pada sistem dari nilai Setting Point dan nilai Present Value. Serta melakukan pengujian menggunakan handuk dengan kondisi panas dan dingin dan menguji sistem secara keseluruhan dalam waktu yang lama.
Cara pengujian dilakukan dengan cara menghidupkan tombol on, kemudian memasukkan nilai Setting Point temperatur. yang ditentukan, setelah itu sistem akan bekerja untuk mempertahankan temperatur pada ruang inkubator bayi sesuai dengan nilai Setting Point.
BAB IV
PERANCANGAN
4.1 Rancangan Penelitian
Pada rancangan penelitian ini terdapat dua tahap perancangan, yaitu perancangan hardware yang berisi rancangan rangkaian yang dibutuhkan dalam sistem, dan rancangan software yang berisi rancangan alur program pada mikrokontroler untuk melakukan pengontrolan pada sistem.
4.1.1 Perancangan Hardware
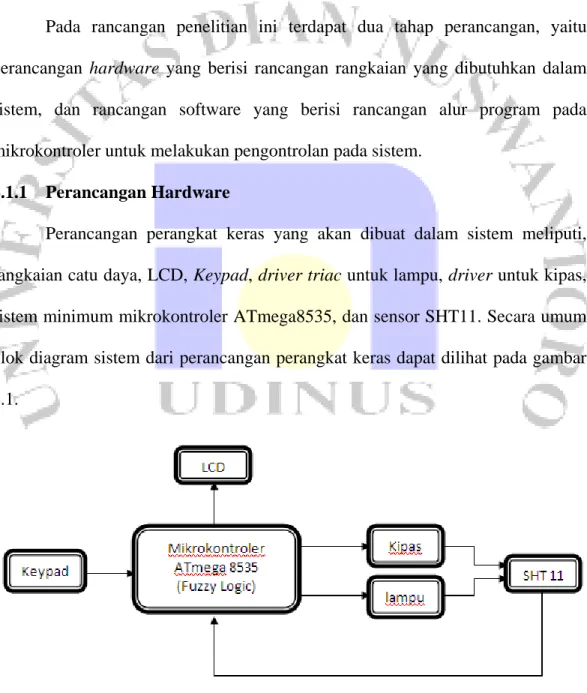
Perancangan perangkat keras yang akan dibuat dalam sistem meliputi, rangkaian catu daya, LCD, Keypad, driver triac untuk lampu, driver untuk kipas, sistem minimum mikrokontroler ATmega8535, dan sensor SHT11. Secara umum blok diagram sistem dari perancangan perangkat keras dapat dilihat pada gambar 4.1.
Gambar 4.1 Blok Diagram Sistem Keseluruhan
Dimana alur kerja dari blok diagram sistem secara keseluruhan yaitu, pertama memasukkan nilai set point temperatur dan kelembaban dari keypad, setelah itu mikrokontroler akan membaca data temperatur dan kelembaban yang keluar dari sensor SHT 11. Kemudian mikrokontroler akan mengolah data sensor menggunakan metode fuzzy ( fuzzyfikasi, inferensi system, defuzzyfikasi), dan keluaran dari mikrokontroler akan mempengaruhi nyala atau mati dari lampu dan kipas, serta nilai temperatur dan kelembaban akan ditampilkan pada LCD. Data hasil pengontrolan akan diumpanbalikkan untuk melakukan pengontrolan berikutnya, jika hasil Present Value belum sesuai dengan Set Point maka nilai PV saat itu akan menjadi input.
4.1.1.1 Perancangan LCD
Dalam sistem modul LCD ini digunakan untuk menampilkan nilai SP (Set Point) dari temperatur dan kelembaban serta menampilkan nilai PV (Present Value) dari temperatur dan kelembaban pada ruang inkubator bayi. Modul ini menggunakan LCD jenis M1632 yang mempunyai ukuran 2x16, maksudnya bahwa tampilan LCD mampu menampilkan 16 karakter dalam dua baris tampilan, sehingga tampilan yang dihasilkan sejumlah 32 karakter. Rangkaian Modul LCD diperlihatkan pada Gambar 4.2.
4.1.1.2 Perancangan Keypad
Dalam penelitian ini, keypad digunakan untuk memasukkan data SP (Set Point) yang selanjutnya akan di respon oleh mikrokontroler. Keypad yang digunakan menggunakan metode matrik. Dimana keluaran yang dihasilkan
merupakan kombinasi baris dan kolom tombol yang ditekan. Bentuk keypad dapat dilihat seperti gambar 4.3
Gambar 4.2 Rangkaian LCD
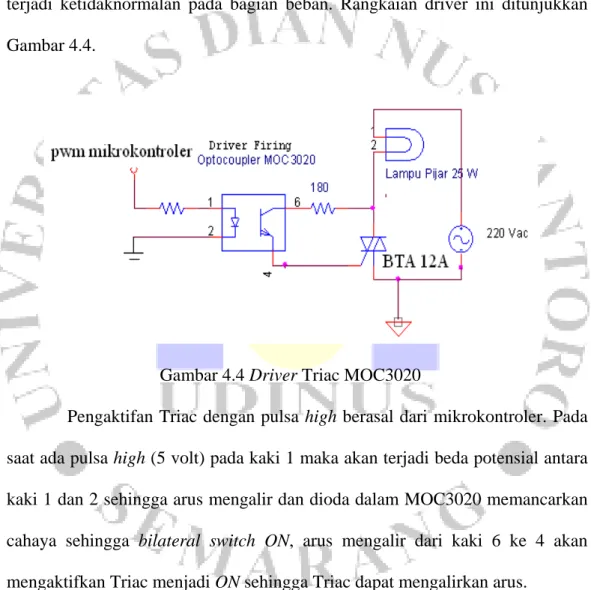
4.1.1.3 Perancangan Driver Triac untuk Lampu
Driver triac pada penelitian ini digunakan untuk menyalakan dan mematikan lampu pada inkubator bayi. Jenis driver triac yang digunakan yaitu tipe MOC3020. Driver ini termasuk jenis optocoupler sehingga relatif aman jika terjadi ketidaknormalan pada bagian beban. Rangkaian driver ini ditunjukkan Gambar 4.4.
Gambar 4.4 Driver Triac MOC3020
Pengaktifan Triac dengan pulsa high berasal dari mikrokontroler. Pada saat ada pulsa high (5 volt) pada kaki 1 maka akan terjadi beda potensial antara kaki 1 dan 2 sehingga arus mengalir dan dioda dalam MOC3020 memancarkan cahaya sehingga bilateral switch ON, arus mengalir dari kaki 6 ke 4 akan mengaktifkan Triac menjadi ON sehingga Triac dapat mengalirkan arus.
Fungsi resistor 180 ohm adalah untuk membatasi arus yang mengalir melalui dioda. Untuk bagian tegangan rendah (sebelah kiri) arus yang mengalir maksimum 30 mA. Apabila hambatan dioda dalam MOC3020 diabaikan maka
arus yang mengalir dapat dihitung sebagai berikut. I = 5/180 = 0,02778 A = 27,78 mA (masih di bawah nilai yang diizinkan) Arus 27,78 mA bagi mikrokontroler sudah dianggap besar, sehingga pengaktifan MOC3020 dengan aktif low agar mikrokontroler tidak melakukan sourcing.
4.1.1.4 Perancangan Dimmer untuk Kipas
Kipas disini digunakan untuk mengendalikan dari temperatur dan kelembaban pada ruang inkubator bayi. Ketika temperatur yang terukur lebih tinggi dari temperatur yang diinginkan (setpoint) maka kipas ini akan menyala dengan maksud untuk mengalirkan udara keluar sehingga terjadi perpindahan kalor. Begitupun untuk keadaan sebaliknya. Kinerja kipas akan sesuai dengan keadaan yang ada dalam ruang inkubator bayi tersebut. Pada rangkaian pengendalian untuk kipas memanfaatkan keluaran PWM dari mikrokontroler. Adapun untuk rangkain pengendali kipas dapat dilihat seperti pada gambar 4.5.
4.1.1.5 Perancangan Sensor SHT11
SHT11 merupakan sensor digital untuk temperatur sekaligus kelembaban. Modul sensor ini sudah memiliki keluaran digital dan sudah terkalibrasi, sehingga tidak perlu lagi melakukan konversi A/D. penggunaan daya yang rendah, sangat baik untuk stabilitas jangka panjang. Perancangan sensor SHT11 terlihat seperti Gambar 4.6.
Gambar 4.6 sensor SHT11
4.1.1.6 Perancangan Sistem Minimum Mikrokontroler ATmega8535
Sistem minimum ATmega8535 digunakan untuk pengendali utama dari sistem pengendalian temperatur dan kelembaban pada inkubator bayi. Mikrokontroler ini dipilih karena memiliki fitur yang cukup lengkap seperti timer dengan kemampuan mengeluarkan gelombang PWM, EEPROM internal, flash memori 8Kb dan masih banyak fitur yang lain. Logika fuzzy yang digunakan dalam pengendalian ini akan ditanamkan pada sistem minimum
mikrokontroler ATmega8535 dengan menggunakan bahasa pemrograman bahasa C.
Mikrokontroler akan mengolah data temperatur dan kelembaban dari sensor SHT11 yang akan digunakan untuk mengendalikan temperatur dan kelembaban dalam plant inkubator itu dengan mempengaruhi nyala atau mati dari lampu dan kipas. Adapun pemanfaatan sistem minimum mikrokontroler dalam sistem dapat dilihat pada Gambar 4.7.
Gambar 4.7 Sistem Minimum Mikrokontroler
4.1.1.7 Dimensi Inkubator
Desain inkubator dibuat dua tingkat, dimana untuk box atas difungsikan untuk tempat bayi, dan untuk box bawah difungsikan untuk peletakan dari semua sistem kontrol untuk pengendalian inkubator bayi ini. Ukuran dari inkubator bayi yang digunakan pada sistem ini yaitu 60 x 40 x40 cm seperti yang terlihat pada Gambar 4.8. Ukuran ini didesain dengan menyesuaikan ukuran bayi prematur. Dimana panjang dari bayi prematur sekitar 48 - 52 cm.
Gambar 4.8 Dimensi Inkubator
4.1.2 Perancangan Software
Software yang digunakan untuk bisa melakukan pengolahan data dan melakukan pengoperasian yang lain untuk mengendalikan temperatur dan pengukuran kelembaban pada inkubator bayi yaitu menggunakan mikrokontroler ATmega8535 dengan menggunakan bahasa pemrogaman bahasa C. program bahasa basic dituliskan dalam Software Compiler CV AVR yang kemudian didownload ke mikrokontroller ATMega8535. Berikut adalah garis besar flowchart dari prototype sistem pengendalian temperatur dan pengukuran kelembaban pada inkubator bayi berbasis logika fuzzy yang ditunjukkan pada Gambar 4.9.
Gambar 4.9 Alur kerja prototype sistem pengendalian temperatur dan Pengukuran kelembaban pada inkubator bayi berbasis logika fuzzy
Keterangan flowchart :
Saat sistem dinyalakan kemudian sistem akan melakukan deklarasi variable, kemudian melakukan inisialisasi port pada mikrokontroler. Setelah itu memasukkan nilai SP (Set Point) temperatur, setelah nilai Set Point disimpan dalam mikrokontroler, mikrokontroler akan membaca data PV (Present Value) temperatur dan kelembaban dari sensor. Antara data Set Point dan Present Value temperatur untuk mendapatkan nilai eror. (nilai eror = PV-SP). Dan menentukan nilai d_eror (nilai d_eror = eror(n) – eror(n-1), Setelah itu akan masuk untuk input fuzzyfikasi, kemudian dilakukan evaluasi rule untuk data input. Setelah itu akan masuk pada tahap Defuzzyfikasi untuk mendapatkan nilai tegas dari keluaran
fuzzy. Nilai Crisp Output dari sistem ini berupa PWM untuk mengontrol pendingin yaitu kipas, dan pemanas yaitu lampu. Nilai data temperatur dan kelembaban akan ditampilkan pada LCD, kemudian sistem akan mengulang proses yang sama.
4.1.3 Perancangan Fuzzy Logic
Fuzzy logic yang digunakan mempunyai 2 input (eror, d-eror), dimana nilai eror merupakan nilai selisih temperatur actual dengan temperatur setting, dan nilai d_eror merupakan selisih dari eror saat ini dengan eror sebelumnya, dan 2 output (lampu, kipas). Membership function masukan mempunyai 3 label linguistik dengan 9 IF-THEN rule. Langkah logika fuzzy yang digunakan yaitu proses fuzzyfikasi, inferensi engine dan defuzzyfikasi.
4.1.3.1 Unit Fuzzyfikasi
Fungsi keanggotaan yang digunakan dalam system dibagi menjadi 4, yaitu :
1. Fungsi keanggotaan eror.
2. Fungsi keanggotaan d-eror.
3. Fungsi keanggotaan lampu.
Berikut ini adalah gambar dan fungsi- fungsi keanggotaan diatas :
1. Fungsi keanggotaan eror
Untuk fungsi keanggotaan temperature memiliki 3 variabel linguistik yaitu rendah,sedang dan tinggi dapat dilihat pada Gambar 4.10.
Gambar 4.10 Fungsi Keanggotaan eror
6. µ rendah (x) = 1 ; x ≤ -1 (-x) / 1 ; -1 ≤ x ≤ 0 0 ; x ≥ 0 7. µ sedang (x) = 0 ; x ≤ -1 atau x ≥ 1 (x+1) / 1 ; -1 ≤ x ≤ 0 (1-x) / 1 ; 0 ≤ x ≤ 1 8. µ tinggi (x) = 0 ; x ≤ 0 (x) / 1 ; 0 ≤ x ≤ 1 1 ; x ≥ 1
2. Fungsi Keanggotaan d-eror
Untuk fungsi keanggotaan kelembaban memiliki 3 variabel linguistik yaitu rendah,sedang dan tinggi dapat dilihat pada gambar 4.11.
Gambar 4.11 Fungsi Keanggotaan d_eror
a. µ rendah (x) = 1 ; x ≤ -1 (-x) / 1 ; -1 ≤ x ≤ 0 0 ; x ≥ 0 b. µ sedang (x) = 0 ; x ≤ -1 atau x ≥ 1 (x+1) / 1 ; -1 ≤ x ≤ 0 (1-x) / 1 ; 0 ≤ x ≤ 1 c. µ tinggi (x) = 0 ; x ≤ 0 (x) / 1 ; 0 ≤ x ≤ 1 1 ; x ≥ 1
3. Fungsi keanggotaan lampu
Untuk fungsi keanggotaan lampu memiliki 3 variabel linguistik yaitu mati,tetap dan nyala dapat dilihat pada gambar 4.12.
Gambar 4.12 Fungsi Keanggotaan Lampu a. µ rendah (x) = 1 ; x ≤ 2 (3-x)/1 ; 2 ≤ x ≤ 3 0 ; x ≥ 3 b. µ sedang (x) = 0 ; x ≤ 2 atau x ≥ 5 (x-2) / 1 ; 2 ≤ x ≤ 3 (5-x)/2 ; 3≤ x ≤ 5 c. µ tinggi (x) = 0 ; x ≤ 3 (x-3) / 2 ; 3 ≤ x ≤ 5 1 ; x ≥ 5
4. Fungsi keanggotaan kipas
Untuk fungsi keanggotaan kipas memiliki 3 variabel linguistik yaitu rendah,sedang dan tinggi dapat dilihat pada Gambar 4.13.
Gambar 4.13 Fungsi Keanggotaan Kipas a. µ rendah (x) = 1 ; x ≤ 2 (3-x)/1 ; 2 ≤ x ≤ 3 0 ; x ≥ 3 b. µ sedang (x) = 0 ; x ≤ 2 atau x ≥ 5 (x-2) / 1 ; 2 ≤ x ≤ 3 (5-x)/2 ; 3≤ x ≤ 5 c. µ tinggi (x) = 0 ; x ≤ 3 (x-3) / 2 ; 3 ≤ x ≤ 5 1 ; x ≥ 5 4.1.3.2 IF-THEN Rule
Aturan – aturan yang digunakan dalam sistem ini yaitu :
1. [R1] IF Eror RENDAH And D-eror RENDAH THEN Lampu TINGGI And Kipas RENDAH
2. [R2] IF Eror RENDAH And D-eror SEDANG THEN Lampu TINGGI And Kipas RENDAH
3. [R3] IF Eror RENDAH And D-eror TINGGI THEN Lampu TINGGI And Kipas SEDANG
4. [R4] IF Eror SEDANG And D-eror RENDAH THEN Lampu SEDANG And Kipas RENDAH
5. [R5] IF Eror SEDANG And D-eror SEDANG THEN Lampu SEDANG And Kipas RENDAH
6. [R6] IF Eror SEDANG And D-eror TINGGI THEN Lampu SEDANG And Kipas SEDANG
7. [R7] IF Eror TINGGI And D-eror RENDAH THEN Lampu RENDAH And Kipas SEDANG
8. [R8] IF Eror TINGGI And D-eror SEDANG THEN Lampu RENDAH And Kipas TINGGI
9. [R9] IF Eror TINGGI And D-eror TINGGI THEN Lampu RENDAH And Kipas TINGGI
Dibawah ini adalah matriks dari ke-9 rule diatas yang terlihat seperti Gambar 4.14.
Gambar 4.14 Matriks rule sistem 4.1.3.3 Mekanisme Pertimbangan Fuzzy
Tahap terakhir dari inferensi fuzzy adalah defuzzifikasi, yang menggunakan rata-rata terbobot, dapat dilihat pada Gambar 4.15. Defuzzifkasi
merupakan kebalikan dari proses fuzzifikasi, yaitu mengubah himpunan fuzzy keluaran menjadi keluaran tegas ( crisp). Pengubahan ini dilakukan karena plant hanya mengenal nilai tegas sebagai variable kendali.
Gambar 4.15 Proses Defuzzyfikasi Metode Tsukamoto
4.2 Pengujian
4.2.1 Pengujian Sensor SHT 11
Pengujian sensor dilakukan dengan membuat program untuk membaca data temperatur dan kelembaban pada mikrokontroler, kemudian data akan ditampilkan pada LCD, selain itu juga menggunakan thermometer untuk data pembanding temperatur. Adapun diagram blok pengujian sensor SHT11 dapat dilihat pada Gambar 4.16
4.2.2 Pengujian Sistem Keseluruhan
Pengujian sistem secara keseluruhan dilakukan dengan menyatukan semua rangkaian yang ada pada sistem, yang dapat dilihat pada Gambar 4.17.
Gambar 4.17 Skema Pengujian Sistem Keseluruhan
Dalam pengujian ini, dilakukan dengan membandingkan nilai SP dan PV temperatur pada kondisi pengujian yg berbeda, yaitu kondisi pagi,siang dan malam yang datanya dimasukkan seperti pada Tabel 4.1. Selain itu juga melakukan pengujian data temperatur dan kelembaban pada tiga kondisi yang berbeda juga, data dimasukkan pada Tabel 4.2.
Tabel 4.1 Tabel Pengujian Temperatur Pengujian Temperatur NO Pengujian 1 Eror Pengujian 2 Eror Pengujian 3 Eror Rata2 Eror Rata-rata Pengujian SP (°C) PV (°C) SP (°C) PV (°C) SP (°C) PV (°C) SP (°C) PV (°C) 1 2 3 4 5 6 7 8 9 10
Tabel 4.2 Tabel Pengujian Temperatur dan Kelembaban Pengujian Temperatur dan kelembaban
NO
Pengujian 1 Pengujian 2 Pengujian 3
Rata-rata Pengujian (°C) (%RH) (°C) (%RH) (°C) (%RH) (°C) (%RH) 1 2 3 4 5 6 7 8 9 10
4.2.3 Pengujian Fuzzy logic pada Sistem
Pengujian dilakukan dengan cara membandingkan nilai defuzzyfikasi antara hasil pengukuran dan teori.
BAB V
HASIL DAN PEMBAHASAN
Pada hasil dan pembahasan dilakukan pengujian untuk mengetahui apakah sistem yang dibuat telah berfungsi dengan baik dan sesuai dengan perancangannya.
Adapun pengujian yang dilakukan meliputi : 1. Pengujian untuk sensor SHT11
2. Pengujian sistem secara keseluruhan 3. Pengujian Fuzzy Logic pada sistem 5.1 Pengujian sensor SHT11
Sensor yang digunakan pada sistem ini adalah SHT11, dimana keluaran dari sensor ini yaitu temperatur dan kelembaban sudah terkalibrasi sehingga tidak perlu dilakukan pengkalibrasian. Pengujian dilakukan dengan membandingkan data yang terbaca oleh sensor dengan data yang terukur menggunakan THERMO-HYGROMETER (alat untuk mengukur temperatur dan kelembaban). Perbandingan data ini dimaksutkan untuk mengetahui apakah sensor dalam keadaan yang baik atau tidak. Untuk diagram blok pengujian sensor SHT11 dapat dilihat pada gambar 5.1.
Gambar 5.1 Diagram Blok Pengujian sensor SHT11
Pengujian dilakukan sebanyak 3 kali untuk data yang terbaca pada mikrokontroler pada keadaan 29°C sampai 38°C kemudian pada kondisi itu juga dilakukan pengukuran dengan HYGROMETER untuk melihat data yang terukur , hal ini bertujuan untuk melihat perbandingan bahwa sensor melakukan pengukuran temperatur dan kelembaban yang sama untuk kondisi yang sama, dengan tiap pengujian diambil 10 data. Dapat dilihat pada Tabel 5.1 untuk data temperatur dan Tabel 5.2 untuk data kelembaban.
Tabel 5.1 Tabel Pengujian Temperatur
Tabel Data Pengujian Temperatur No Pengujian 1 Pengujian 2 Pengujian3
Rata-Rata Pengujian Terbaca (°C) Terukur (°C) Terbaca (°C) Terukur (°C) Terbaca (°C) Terukur (°C) Terbaca (°C) Terukur (°C) 1 29 29 29 29 29 29 29 29 2 30 30 30.01 29 30 30 30.03 29.67 3 31 31 31 31 31 31 31 31 4 32 32 32 32 32 32 32 32 5 33 33 33 33 33 33 33 33 6 34 34 34 34 34 34 34 34 7 35 35 35 35 35 35 35 35 8 36 36 36 36 36 36 36 36 9 37 37 37 37 37 37 37 37 10 38 38 38 38 38 38 38 38
Dari data rata-rata diatas dapat dilihat antara data terbaca dengan data terukur mempunyai data yang sama, untuk melihat grafik perbandingan antara kedua data rata-rata pengujian dapat dilihat seperti Gambar 5.2 :
Gambar 5.2 Grafik Data Temperatur
Dari pengujian data temperatur ini dapat disimpulkan bahwa sensor SHT11 dalam mendeteksi temperatur bekerja dengan baik. Hal ini dapat dibuktikan bahwa antara temperatur yang terbaca sebanding dengan data yang terukur, serta melihat hasil grafik yang berpola linier dengan persamaan yang didapatkan yaitu y = 1.015x-0.545 dengan nilai regresi 0.998.
Tabel 5.2 Tabel Pengujian Kelembaban Tabel Data Pengujian Kelembaban
No Pengujian 1 Pengujian 2 Pengujian3
Rata-Rata Pengujian Terbaca (%RH) Terukur (%RH) Terbaca(%RH) Terukur (%RH) Terbaca (%RH) Terukur (%RH) Terbaca (%RH) Terukur (%RH) 1 50.12 50 50.32 50 50.01 50 50.15 50 2 51.02 51 51.23 51 51.22 51 51.19 51 3 52.23 51 52.02 52 52 52 52.08 51.67 4 53.01 52 53.28 53 53.01 53 53.1 52.67 5 54.02 54 54.01 53 54.03 54 54.02 53.67 6 55 55 55.38 54 55.1 55 55.16 54.67 7 56 56 56.12 56 56 56 56.04 56 8 57 57 57.04 57 57 57 57.01 57 9 58.33 57 58 57 58 58 58.11 57.67 10 59 59 59 59 59.21 59 59.07 59
Dari data diatas dapat dilihat antara data terbaca dengan data terukur mempunyai data yang hampir sama, untuk melihat grafik perbandingan antara kedua data rata-rata pengujian dapat dilihat seperti gambar 5.3 :
Gambar 5.3 Grafik Data Kelembaban
Dari pengujian data kelembaban ini dapat disimpulkan bahwa sensor SHT11 dalam mendeteksi kelembaban bekerja dengan baik. Hal ini dapat
dibuktikan bahwa antara kelembaban yang terbaca sebanding dengan data yang terukur, serta melihat hasil grafik yang berpola linier dengan persamaan yang didapatkan yaitu y = 1.011x-0.909 dengan nilai regresi 0.996.
Dari kedua hasil data pengujian diatas dapat disimpulkan bahwa sensor SHT11 yang digunakan dalam sistem dapat bekerja dengan baik dalam mendeteksi temperatur dan kelembaban.
5.2 Pengujian sistem secara keseluruhan
Pengujian sistem secara keseluruhan dilakukan dengan cara menghubungkan semua rangkaian menjadi satu, yaitu rangkaian sensor SHT11, rangkaian catu daya, rangkaian sistim minimum mikrokontroler ATMega 8535, rangkaian lampu, rangkaian kipas, dan rangkaian lcd. Skema hubungan antar rangkaian dapat dilihat pada Gambar 5.4.
Gambar 5.4 Skema Pengujian Sistem Keseluruhan Langkah melakukan pengujian pada sistem kali ini yaitu : 1. Menyalakan power on pada sistem.
3. Mikokontroler membaca nilai Present Value temperatur dan kelembaban dari sensor SHT11.
4. Mikrokontroler akan membandingkan nilai Present Value dengan nilai Setting Point untuk mendapatkan nilai eror dan d_eror temperatur.
5. Mikrokontroler akan memasukkan nilai eror dan d_eror pada proses fuzzyfikasi, setelah itu masuk pada proses pengidintifikasian rule, dan proses defuzzyfikasi.
6. Nilai defuzzyfikasi yang dihasilkan akan digunakan untuk mengendalikan lampu dan kipas.
7. Nilai temperatur dan kelembaban akan ditampilkan pada LCD.
Pengujian sistem keseluruhan dilakukan dengan membandingkan nilai dari Setting Point dengan nilai Present Value , untuk mengetahui pengontrolan yang ada pada sistem bekerja dengan baik atau tidak. Karena pengontrolan yang dilakukan pada sistem ini yaitu mengendalikan dan mempertahankan keadaan temperatur pada kondisi ruang inkubator bayi pada nilai Setting Point yang telah ditentukan. Untuk nilai kelembaban mengikuti temperatur yang ada, sehingga kelembaban tidak perlu untuk dilakukan pengontrolan. Antara data temperatur dan kelembaban memiliki perbandingan data yang linier.
Pengujian dilakukan sebanyak 3 kali untuk keadaan pengujian yang berbeda, dimana pengujian yang pertama adalah untuk kondisi pagi pengujian kedua adalah untuk kondisi siang dan pengujian ketiga adalah pengujian malam, dengan kondisi tempeatur ruang sekitar inkubator antara 26°C sampai 32 °C dan
kondisi kelembabannya sekitar 54%RH sampai 61%RH, dengan pengambilan data tiap pengujian yaitu 10 data. Data pengujian temperatur dapat dilihat pada Tabel 5.3.
Tabel 5.3 Data pengujian Setting Point dan Present Value Temperatur
Pengujian Temperatur
NO Pengujian 1 Pengujian 2 Pengujian 3
Rata-rata Pengujian SP (°C) PV (°C) Eror SP (°C) PV(°C) Eror SP (°C) PV (°C) Eror Rata2 Eror SP(°C) PV (°C) 1 35 35 0 35 35.02 0.02 35 35.05 0.05 0.023333 35 35.02 2 36 36.13 0.13 36 36.23 0.23 36 36.04 0.04 0.133333 36 36.13 3 37 37.34 0.34 37 37.12 0.12 37 37.02 0.02 0.16 37 37.16 4 38 38.04 0.04 38 38.02 0.02 38 38.01 0.01 0.023333 38 38.02 5 39 39.02 0.02 39 39.01 0.01 39 39.02 0.02 0.016667 39 39.02 6 40 40 0 40 40.02 0.02 40 40.02 0.02 0.013333 40 40.01 0.061667 Keterangan tabel :
Pengujian 1 = pengujian pada kondisi pagi Pengujian 2 = pengujian pada kondisi siang Pengujian 3 = pengujian pada kondisi malam
Dari ketiga hasil diatas, untuk tiga kondisi yag berbeda dapat disimpulkan bahwa, dalam keadaan apapun sistem masih bisa melakukan pengontrolan yang baik. Dengan nilai eror pada sistem adalah 0.18. Grafik dari tiap pengujian data temperatur dapat dilihat pada Gambar 5.5 untuk pengujian 1, Gambar 5.6 untuk pengujian 2, Gambar 5.7 untuk pengujian 3 dan Gambar 5.8 untuk rata-rata pengujian.
Gambar 5.5 Grafik Temperatur Pengujian 1
Gambar 5.7 Grafik Temperatur Pengujian3
Gambar 5.8 Grafik rata-rata Pengujian Temperatur
Dari hasil grafik diatas, dapat disimpulkan bahwa dalam kondisi yang berbeda pengontrolan pada sistem ini berjalan dengan baik, hal ini dapat dibuktikan dari hasil grafik rata-rata pengujian temperatur yang membentuk pola linier dengan persamaan y = 0.997x + 0.260 dengan nilai regresi 0.999.
dan data perbandingan temperatur dengan kelembaban dapat dilihat pada Tabel 5.4. Pengujian ini juga dilakukan sebanyak 3 kali dalam kondisi yang berbeda, untuk melihat perbandingan kelinieran dari data temperatur dan
kelembaban yang terukur oleh sensor. Pengujian dilakukan dari temperatur 34°C sampai 40°C.
Tabel 5.4 Data pengujian antara temperatur dan kelembaban Pengujian Temperatur
NO
Pengujian 1 Pengujian 2 Pengujian 3 Rata2Pengujian (°C) (%RH) (°C) (%RH) (°C) (%RH) (°C) (%RH) 1 34 59.35 34 34.01 34 34.03 34 34.03 2 35 59.2 35 35.02 35 35.05 35 35.02 3 36 60.21 36 36.23 36 36.04 36 36.13 4 37 61.09 37 37.12 37 37.02 37 37.16 5 38 60.22 38 38.02 38 38.01 38 38.02 6 39 61.12 39 39.01 39 39.02 39 39.02 7 40 62.03 40 40.02 40 40.02 40 40.01 Keterangan tabel :
Pengujian 1 = kondisi pagi Pengujian 2 = kondisi siang Pengujian 3 = kondisi malam
Dapat dilihat dari tabel antara data temperatur dan kelembaban mendapatkan hasil yang linier dengan kondisi keadaan pengujian yang berbeda . Grafik dari tiap pengujian dapat dilahat pada Gambar 5.9 untuk pengujian satu, Gambar 5.10 untuk pengujian 2, Gambar 5.11 untuk pengujian 3 dan Gambar 5.12 untuk data rata-rata.
Gambar 5.9 Grafik Pengujian 1 {°C dan %RH}
Gambar 5.11 Grafik Pengujian 3 {°C dan %RH}
Gambar 5.12 Grafik Pengujian rata-rata Temperatur dan Kelembaban Dari hasil grafik diatas, dapat disimpulkan bahwa hasil temperatur dan kelembaban berbanding lurus, kelembaban mengikuti pergerakan dari temperatur yang ada. Untuk temperatur yang dibutuhkan oleh bayi yaitu antara 31°C sampai 37°C, sedangkan kelembaban yang dibutuhkan antara 50%RH sampai 60 %RH. Dari data diatas kondisi temperatur sudah memenuhi dengan kebutuhan bayi,
sedangkan untuk kelembaban pada kondisi temperatur 35°C adalah 60%RH hal ini menunjukkan bahwa kelembaban sudah melebihi batas kebutuhan bayi, sehingga dalam sistem ini untuk kelembaban belum bisa dilakukan pengontrolan secara baik. Untuk mendapatkan pengontrolan kelembaban yang baik dalam sistem harus ditambah reservoir air untuk sirkulasi uap air.
Pengujian risetime pada sistem inkubator bayi dilakukan dengan menghitung waktu yang dibutuhkan dari keadaan suhu ruang untuk mencapai nilai setting point yang ditentukan. Pengujian dilakukan dengan memanfaatkan handuk panas dan dingin dengan waktu pengujian dilakukan pada pagi hari dengan kondisi temperatur ruang disekitar inkubator adalah 28°C, siang hari dengan kondisi temperatur ruang disekitar inkubator adalah 31°C dan malam hari dengan kondisi temperatur ruang disekitar inkubator adalah 29°C. Untuk data handuk dingin saat pengujian pagi hari dapat dilihat pada Tabel 4.5 dan Tabel 5.6 untuk data handuk panas, sedangkan untuk data handuk dingin saat pengujian siang hari dapat dilihat pada Tabel 5.7 dan Tabel 5.8 untuk data handuk panas, dan untuk data handuk dingin saat pengujian malam hari dapat dilihat pada Tabel 5.9 dan Tabel 5.10 untuk data handuk panas serta Tabel 5.11 untuk hasil data rata-rata percobaan handuk dingin dan Tabel 5.12 untuk hasil data rata-rata percobaan handuk panas.
Tabel 5.5 Pengujian pagi dengan handuk dingin , suhu ruang = 28°C Pengujian pagi dengan handuk dingin , suhu ruang = 28°C No SP Suhu Inkubator Suhu bayi awal Suhu bayi PV waktu 1 32 °C 30 °C 19.9 °C 24.4 °C 1m 2dt 2 33 °C 31 °C 19.8 °C 26.6 °C 1m 57 dt 3 34 °C 31 °C 20 °C 26.9 °C 3m 34dt 4 35 °C 31 °C 19.8 °C 29.1 °C 3m 47dt 5 36 °C 31 °C 20.1 °C 29.3 °C 4m 55dt Tabel 5.6 Pengujian pagi dengan handuk panas , suhu ruang = 28°C
Pengujian pagi dengan handuk panas , suhu ruang = 28°C No SP Suhu Inkubator Suhu bayi awal Suhu bayi PV waktu 1 32 °C 30 °C 34.4 °C 29.6 °C 1m 2 33 °C 30 °C 33.4 °C 29.1 °C 1m 43 dt 3 34 °C 30 °C 33.8 °C 30 °C 2m 4 35 °C 30 °C 33.3 °C 29.7 °C 3m 13dt 5 36 °C 30 °C 32.8 °C 30.1 °C 4m 12dt Tabel 5.7 Pengujian pagi dengan handuk dingin , suhu ruang = 31°C
Pengujian pagi dengan handuk dingin , suhu ruang = 31°C No SP Suhu Inkubator Suhu bayi awal Suhu bayi PV waktu 1 33 °C 32 °C 20.1 °C 25.3 °C 59dt 2 34 °C 32 °C 19.9°C 26 °C 1m 5 dt 3 35 °C 32 °C 20.2 °C 25.6 °C 2m 2dt 4 36 °C 32 °C 20.1 °C 26.6 °C 2m 52dt
Tabel 5.8 Pengujian pagi dengan handuk panas , suhu ruang = 31°C Pengujian pagi dengan handuk panas , suhu ruang = 31°C No SP Suhu Inkubator Suhu bayi awal
Suhu bayi PV waktu 1 33 °C 32 °C 34 °C 29.9 °C 55sdt 2 34 °C 32 °C 34.3°C 30.1 °C 1m 25 dt 3 35 °C 32 °C 33.4 °C 30.9 °C 2m 34dt 4 36 °C 32 °C 34.6 °C 31.1 °C 3m 25dt Tabel 5.9 Pengujian pagi dengan handuk dingin , suhu ruang = 29°C
Pengujian pagi dengan handuk dingin , suhu ruang = 29°C No SP Suhu Inkubator Suhu bayi awal
Suhu bayi PV waktu 1 32 °C 31 °C 20.1 °C 26.2 °C 1m 3dt 2 33 °C 31 °C 21.2 °C 26.6 °C 1m 40 dt 3 34 °C 31 °C 21.8 °C 26.8 °C 2m 2dt 4 35 °C 31 °C 21.6 °C 27.2 °C 2m 16dt 5 36 °C 31 °C 22.1 °C 27 °C 2m 54dt
Tabel 5.10 Pengujian pagi dengan handuk panas , suhu ruang = 29°C Pengujian pagi dengan handuk panas , suhu ruang = 29°C No SP Suhu Inkubator Suhu bayi awal
Suhu bayi PV waktu 1 32 °C 31 °C 35.3 °C 31.4 °C 34dt 2 33 °C 31 °C 35.8 °C 31.9 °C 59dt 3 34 °C 31 °C 35.3 °C 31.2 °C 1m 15dt 4 35 °C 31 °C 35.6 °C 32 °C 1m 20dt 5 36 °C 31 °C 34 °C 30.8 °C 2m 10dt
Tabel 5.11 Data rata2 handuk dingin dari ke-3 kondisi data rata2 handuk dingin dari ke-3 kondisi
No SP Suhu Inkubator Suhu bayi awal Suhu bayi PV time 1 32 °C 30.5 °C 20 °C 25.3 °C 1m 12s 2 33 °C 31.33 °C 20.4 °C 26.2 °C 1m 32 s 3 34 °C 31.33 °C 20.6 °C 26.6 °C 2m 14s 4 35 °C 31.33 °C 20.5°C 27.3 °C 2m 42s 5 36 °C 31.33 °C 20.8 °C 27.6 °C 3m 34s
Tabel 5.12 Data rata2 handuk panas dari ke-3 kondisi data rata2 handuk panas dari ke-3 kondisi
No SP Suhu Inkubator Suhu bayi awal Suhu bayi PV time 1 32 °C 30.5 °C 34.8 °C 30.5 °C 47s 2 33 °C 31.33 °C 34.2 °C 30.3 °C 1m 12 s 3 34 °C 31.33 °C 34.5 °C 30.4 °C 1m 30s 4 35 °C 31.33 °C 34.1°C 30.8 °C 2m 22s 5 36 °C 31.33 °C 33.8 °C 30.7 °C 3m 15s
Dari tabel 5.11 dan 5.12 risetime yang dibutuhkan untuk mencapai nilai setting point yang ditentukan lebih cepat pada saat inkubator diberikan handuk panas dari pada saat diberikan handuk dingin.
Untuk pengujian sistem secara keseluruhan mengetahui tingkat kestabilan dalam mempertahankan nilai SettingPoint yang ditentukan, data diambil selama 60 menit dapat dilihat pada Tabel 5.13.
Tabel 5.13 Data Pengujian sistem selama 60 menit Pengujian sistem selama 60 menit
No SP PV time 1 34 °C 34.02 °C 5 menit 2 34 °C 34.72 °C 10 menit 3 34 °C 34.80 °C 15 menit 4 34 °C 34.81 °C 20 menit 5 34 °C 34.8 °C 25 menit 6 34 °C 34.79 °C 30 menit 7 34 °C 34. 8°C 35 menit 8 34 °C 34.78 °C 40 menit 9 34 °C 34.81 °C 45 menit 10 34 °C 34. 81°C 50 menit 11 34 °C 34.79 °C 55 menit 12 34 °C 34.8 °C 60 menit
Dari Tabel 5.13 dapat dilihat bahwa dalam waktu percobaan sistem inkubator bayi selama 60 menit dengan nilai SettingPoint yang ditentukan adalah 34°C. Dengan pengambilan data dilakukan setiap 5 menit sekali dapat diamati bahwa nilai hasil pengendalian temperatur menggunakan metode fuzzy logic bisa mempertahankan kondisi sesuai dengan
5.3 Pengujian fuzzy logic pada sistem
Pada pengujian fuzzy logic pada sistem kali ini dilakukan sebanyak 5 kali dengan langkah defuzzyfikasi input, pengecekan rule base, dan defuzzyfikasi.
1. Data eror = -2 dan data d_eror =-2 Menentukan fungsi keanggotaan eror
µ rendah (-2) = 1
Menentukan fungsi keanggotaan d_eror
µ rendah (-2) = 1
Dari fungsi keanggotaan diatas ada 1 rule yang memenuhi yaitu :
a. [R1] IF Eror RENDAH And D-eror RENDAH THEN Lampu TINGGI And Kipas RENDAH
α-predikat1 = µeror rendah ∩ µd_eror rendah
= min (µeror rendah [-4] , µd_eror rendah [-4])
= min (1, 1)
= 1
Lihat himpunan output lampu TINGGI,
Lihat himpunan output kipas RENDAH, 3-Y = 1 y1 = 2 Mencari nilai defuzzyfikasi X:
Z = 5
Mencari nilai defuzzyfikasi Y :
Y = 2
Sehingga untuk nilai eror = -2 dan d_eror = -2, hasil defuzzyfikasi lampu = 5 dan kipas = 2.
2. Nilai eror = -1 dan nilai d_eror = -1 Menentukan fungsi keanggotaan eror
µ rendah (-1) = 1
Menentukan fungsi keanggotaan d_eror
µ rendah (-1) = 1
Dari fungsi diatas ada 1 rule yang memenuhi, yaitu :
a. [R1] IF Eror RENDAH And D-eror RENDAH THEN Lampu TINGGI And Kipas RENDAH
α-predikat1 = µeror rendah ∩ µd_eror rendah
= min (µeror rendah [-4] , µd_eror rendah [-4])
= min (1, 1)
= 1
Lihat himpunan output lampu TINGGI,
Lihat himpunan output kipas RENDAH, 3-Y = 1 y1 = 2 Mencari nilai defuzzyfikasi X:
Z = 5
Mencari nilai defuzzyfikasi Y :
Y = 2
Sehingga untuk nilai eror = -1 dan d_eror = -1, hasil defuzzyfikasi lampu = 5 dan kipas = 2.
3. Nilai eror = -1 dan nilai d_eror = -0.5
Menentukan fungsi keanggotaan eror
µ rendah (-1) => 1
Menentukan fungsi keanggotaan d_eror
µ rendah (-0.5) => (0.5) / 1 = 0.5 µ sedang (-0.5) => (-0.5+1) / 1 = 0.5
Dari fungsi keanggotaan tersebut, ada 2 rule yang memenuhi, yaitu : a. [R2] IF Eror RENDAH And D-eror SEDANG THEN Lampu TINGGI
And Kipas RENDAH
α-predikat1 = µeror rendah ∩ µd_eror sedang
= min (µeror rendah [-1] , µd_eror sedang [-0.5])
= min (1, 0.5)
Lihat himpunan output lampu TINGGI, (Z-3) / 2 = 0.5 Z1 = 4 Lihat himpunan output kipas RENDAH,
3-Y = 0.5 Y1 = 2.5
b. [R1] IF Eror RENDAH And D-eror RENDAH THEN Lampu TINGGI And Kipas RENDAH
α-predikat2 = µeror rendah ∩ µd_eror rendah
= min (µeror rendah [-1] , µd_eror rendah [-0.5])
= min (1, 0.5)
= 0.5
Lihat himpunan output lampu TINGGI, (Z-3) / 2 = 0.5 Z2 = 4 Lihat himpunan output kipas RENDAH,
3-Y = 0.5 Y1 = 2.5 Mencari nilai defuzzyfikasi Z:
Mencari nilai defuzzyfikasi Y :
Y = 2.5
Sehingga untuk nilai eror = -1 dan d_eror = -0.5, hasil defuzzyfikasi lampu = 4 dan kipas = 2.5.
4. Nilai eror = 1 dan nilai d_eror = 2
Menentukan fungsi keanggotaan eror
µ tinggi (1) => 1
Menentukan fungsi keanggotaan d_eror
µ tinggi (2) => 1
Dari fungsi keanggotaan diatas, ada 1 rule yang memenuhi, yaitu : a. [R9] IF Eror TINGGI And D-eror TINGGI THEN Lampu
RENDAH And Kipas TINGGI
α-predikat4 = µeror tinggi ∩ µd_eror tinggi
= min (µeror tinggi [1] , µd_eror tinggi [2])
= min (1,1)
= 1
Lihat himpunan output lampu RENDAH, 3 - Z = 1 Z1 = 2 Lihat himpunan output kipas TINGGI, (Y-3) / 2 = 1 Y1 = 5 Mencari nilai defuzzyfikasi Z:
Z = 2
Mencari nilai defuzzyfikasi Y :
Sehingga untuk nilai eror = 1 dan d_eror = 2, hasil defuzzyfikasi lampu = 2 dan kipas = 5.
Nilai Z merupakan hasil defuzzyfikasi untuk lampu dan nilai Y merupakan hasil defuzzyfikasi untuk kipas. Keluaran dari defuzzyfikasi ini adalah berupa tegangan untuk mengontrol lampu dan kipas dalam sistem. Dari ke-empat data diatas dapat dilihat pada Tabel 5.15.
Tabel 5.15 Keluaran Sistem Fuzzyfikasi
No Eror D_Eror Lampu (Z) V Kipas(Y) V 1 -2 -2 5 2 2 -1 -1 5 2 3 -1 -0.5 4 2.5 4 1 2 2 5
Dari tabel diatas dapat diambil kesimpulan bahwa, jika temperatur yang terukur dibawah nilai Setting Point yang ditentukan maka lampu memiliki keluaran tegangan tinggi dengan nilai maksimal tegangan adalah 5 V dan kipas memiliki keluaran tegangan rendah , dan jika temperatur yang terukur diatas nilai Setting Point maka kondisinya berkebalikan yaitu lampu memiliki keluaran tegangan rendah dan kipas memiliki keluaran tegangan tinggi.
BAB VI
PENUTUP
6.1 Kesimpulan
Dari penelitian yang telah dilakukan maka dapat diambil kesimpulan sebagai berikut :
1. Telah berhasil dibuat sistem pengendalian temperatur dan pengukuran kelembaban pada inkubator bayi berbasis logika fuzzy.
2. Sistem pengendalian temperatur menggunakan logika fuzzy mendapatkan data dengan nilai eror 0.06.
6.2 Saran
1. Menambahkan sistem humidity fire untuk melakukan pengontrolan kelembaban yang baik.
2. Menggunakan metode yang lebih bagus dari Fuzzy Logic, missal PID untuk lebih mempercepat nilai rise time.
DAFTAR PUSTAKA
[1] Setiati, T.E. Atmojo,D.Winarno. Hardjojuwono A.G.S, 1991, Penatalaksanaan Kegawatan Neonatus, Semarang : Badan Penerbit Undip.
[2] Iguh Sasmito, Adityan., 2010, “Rancang Bangun Sistem Monitoring Pengendalian Temperatur Dan Pengukuran Kelembaban Pada Inkubator Bayi Berbasis Mikrokontroler AT89S51”, http://eprints.undip.ac.id/1/Adityan_Iguh_Sasmito_(J0D007005)_pdf [3] Hannawati, Annies, Thiang, Resmana, “Prototipe Sistem Kendali
Temperatur Berbasis Fuzzy Logic Pada Sebuah Inkubator”, http://faculty.petra.ac.id/thiang/download/paper/inkubator.pdf
[4] Kusumadewi, Sri & Purnomo, Hari. Aplikasi Logika Fuzzy untuk Pendukung Keputusan.Yogyakarta: Graha Ilmu, 2004.
[5] Heryanto,Ari.M & Adi . P. Wisnu, Pemrograman Bahasa C untuk Mikrokontroler ATMEGA8535. Yogyakarta : Andi,2008.
[6] Surasmi,Asrining dkk, 2003, Perawatan Bayi Resiko Tinggi,EGC, Jakarta.
[7] Speirs,AI, 1981, Ilmu Kesehatan Anak untuk Perawat, edisi 2, Semarang : IKIP Semarang Press.
1. LISTING PROGRAM #include <mega8535.h> #include <delay.h> #include <stdio.h> #include <stdlib.h> #include <math.h>
#define fanOn PORTB.4=1 #define fanOff PORTB.4=0
// Alphanumeric LCD Module functions #asm
.equ __lcd_port=0x15 ;PORTC #endasm
#include <lcd.h>
#define ShtData PORTD.5 //7 #define ShtDin PIND.5
#define ShtClock PORTD.4 //6 #define sdel 25 #define noACK 0 #defineACK 1 //adr command r/w #define STATUS_REG_W 0x06 //000 0011 0 #define STATUS_REG_R 0x07 //000 0011 1 #define MEASURE_TEMP 0x03 //000 0001 1 #define MEASURE_HUMI 0x05 //000 0010 1 #define RESET 0x1e //000 1111 0
// Declare your global variables here unsigned int tick,set;
//char status_data;
float suhu,deltasuhu,deltasuhuawal,deError; float Humi;
bit TimeOut,Ackbit,err,fuzz,tampilan; //Ackbit : '0' (ACK), '1' (NOACK) unsigned char lcd_buf[16];
unsigned char datatombol,pwmlampu,i,suhuset; unsigned char lcd_buff[16];
void data_input(void) { DDRD=0xD0;//1101 0000 ShtData=1; } 65
void data_output(void) {
DDRD=0xF0;//1111 0000 ShtData=0;
}
void SHT_Start (void) {
data_input();//ShtData=1; //Pin ShtData sebagai input, sehingga berlogika '1'
ShtClock=0; delay_us(sdel); delay_us(sdel);
ShtClock=1; //Clock pertama delay_us(sdel);
data_output();//ShtData=0; //Pin ShtData = '0' delay_us(sdel);
ShtClock=0;
delay_us(sdel);delay_us(sdel); ShtClock=1; //Clock kedua delay_us(sdel);
data_input();//ShtData=1; //Pin ShtData = '1' (input) delay_us(sdel);
ShtClock=0; //Pin ShtClock = '0' delay_us(sdel);
}
//--- Reset komunikasi: 9 clock cyle dengan ShtData '1', lalu kondisi start --- void SHT_Connection_Reset (void)
{
unsigned char i;
data_input();//ShtData=1; //input ShtClock=0;
for (i=0; i<9; i++) {
ShtClock=1; //Kirim Data (ShtClock rising edge), 9 kali delay_us(sdel);
ShtClock=0; delay_us(sdel); }
SHT_Start(); //Transmission Start }
//Tunggu sampai SHT11 selesai melakukan pengukuran (pin Data = '0') //Timeout pengukuran sekitar 1/4 detik (TimeOut = '0' --> measure OK) void SHT_Wait (void)
{
unsigned int i;
data_input();//ShtData=1; //Pin ShtData sebagai input
for (i=0; i<2500; i++) {
TimeOut=ShtDin; //Jika pin ShtData = '0' --> pengukuran selesai if (TimeOut==0) break;
delay_ms(1);
if(i>=2400){err=1;} }
}
//Transmit Data dan ambil bit Acknowledge void SHT_Write_Byte (unsigned char data) {
unsigned char i; for (i=0; i<8; i++) {
if ((data>>7)==1) data_input();//ShtData=1; //Kirim MSB first else data_output();//ShtData=0;
ShtClock=1; //Kirim Data (ShtClock rising edge) delay_us(sdel);delay_us(sdel);
ShtClock=0; delay_us(sdel); data<<=1; }
data_input();//ShtData=1; //Pin ShtData sebagai input ShtClock=1;
Ackbit=ShtDin; //Ambil sinyal acknowledge delay_us(sdel);
ShtClock=0;
}
//Receive Data dan kirim bit "AckBit" ('0' untuk ACK atau '1' untuk NACK) unsigned char SHT_Read_Byte (void)
{
unsigned char i,data; data=0;
data_input();//ShtData=1; //Pin ShtData sebagai input for (i=0; i<8; i++)