PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI
BISING AKTIF PADA DSK TMS320C6713 MENGGUNAKAN
ALGORITMA ADJOINT-LMS
Muhammad Rizki Anggia
Sekolah Teknik Elektro dan Informatika, Institut Teknologi
Bandung
[email protected]
Abstraksi. Active Noise Control (ANC) didapatkan berdasarkan prinsip superposisi
bahwa derau dapat ditiadakan oleh derau lain yang memiliki amplitude yang sama namun berlawanan fase. Prinsip ini juga telah diimplementasikan untuk mereduksi vibrasi dan derau pada mesin. Algoritma FXLMS merupakan algoritma yang paling sering digunakan pada aplikasi Active Noise Control(ANC) karena memiliki bentuk dan komputasi yang paling sederhana. Algoritma FXLMS memiliki varian-varian lain yang ternyata memiliki komputasi yang lebih sederhana. Salah satu dari varian algoritma FXLMS adalah algoritma Adjoint LMS dimana sinyal referensi tidak perlu di filter, namun sinyal error yg di filter.
Kata kunci: Active Noise Control, Adaptive Filter, Adjoint LMS I. Pendahuluan
Permasalahan derau akustik saat ini sudah semakin besar karena berkembangnya keperluan industri seperti mesin, blowers, trafo dan kompresor. Usaha tradisional untuk mengontrol derau akustik dengan memberi barrier ataupun melapisi lingkungan dengan peredam suara sudah tidak efektif lagi digunakan karena biaya yang banyak dan mahal. Teknik ini juga hanya berfungsi untuk meredam suara dengan frekuensi tinggi, namun masih belum bisa digunakan untuk derau frekuensi rendah. Oleh karena itu, diciptakan metode Active Noise Control(ANC) untuk mengontrol derau pada frekuensi rendah namun dengan biaya yang lebih murah. Algoritma yang paling sering digunakan pada ANC adalah algoritma FXLMS karena penggunaannya yang mudah. Gambar 1 memperlihatkan sistem ANC dengan menggunakan
algoritma FXLMS. Biasanya jalur utama dan sekunder dari ANC diasumsikan linear. Algoritma FXLMS tetapi memiliki beberapa kekurangan berupa lambat dalam mencapai waktu konvergensi dan memiliki komputasi yang rumit jika menggunakan system multi input dan multi output. Pada paper ini, digunakan algoritma Adjoint LMS yang merupakan alternatif dari algoritma FXLMS dimana pada algoritma Adjoint LMS sinyal referensi tidak difilter, tetapi sinyal error nya yang difilter. Algoritma Adjoint LMS tidak menghasilkan konvergensi yang lebih cepat daripada algoritma FXLMS, tetapi pada system multi input dan multi output algoritma Adjoint LMS memiliki komputasi yang jauh lebih sederhana daripada algoritma FXLMS. Namun pada paper ini tidak akan dibahas mengenai system dengan multi input multi output, tetapi hanya membandingkan
hasil dari algoritma FXLMS dan Adjoint LMS pada sistem 1 kanal.
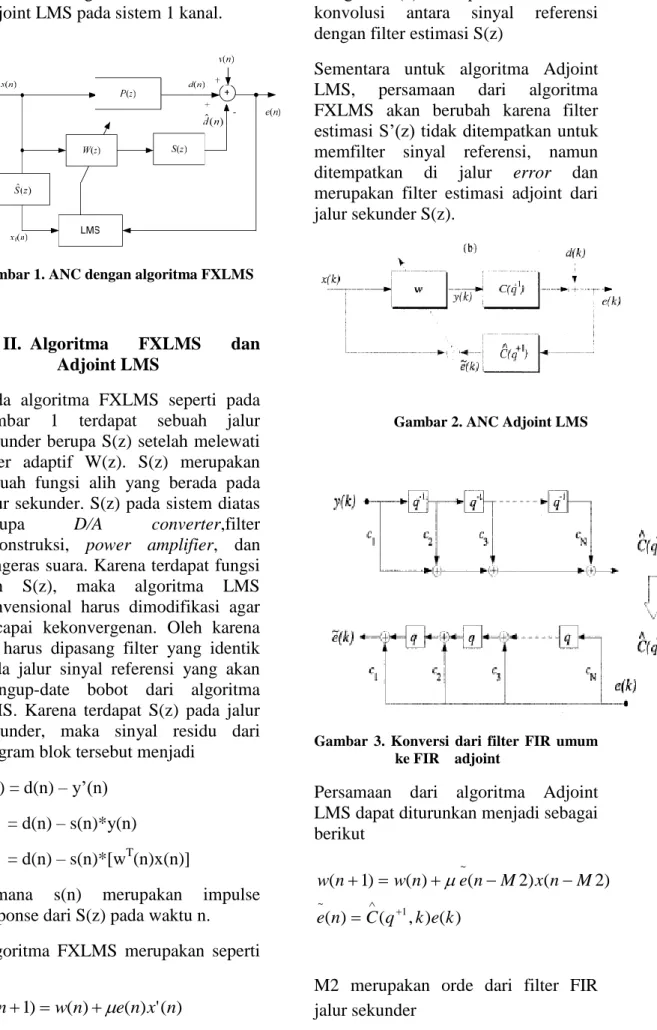
Gambar 1. ANC dengan algoritma FXLMS
II. Algoritma FXLMS dan Adjoint LMS
Pada algoritma FXLMS seperti pada gambar 1 terdapat sebuah jalur sekunder berupa S(z) setelah melewati filter adaptif W(z). S(z) merupakan sebuah fungsi alih yang berada pada jalur sekunder. S(z) pada sistem diatas berupa D/A converter,filter
rekonstruksi, power amplifier, dan pengeras suara. Karena terdapat fungsi alih S(z), maka algoritma LMS konvensional harus dimodifikasi agar tercapai kekonvergenan. Oleh karena itu harus dipasang filter yang identik pada jalur sinyal referensi yang akan mengup-date bobot dari algoritma LMS. Karena terdapat S(z) pada jalur sekunder, maka sinyal residu dari diagram blok tersebut menjadi
e(n) = d(n) – y’(n) = d(n) – s(n)*y(n)
= d(n) – s(n)*[wT(n)x(n)]
Dimana s(n) merupakan impulse response dari S(z) pada waktu n. Algoritma FXLMS merupakan seperti ini ) ( ' ) ( ) ( ) 1 (n wn e n x n w
Dengan x’(n) merupakan hasil dari konvolusi antara sinyal referensi dengan filter estimasi S(z)
Sementara untuk algoritma Adjoint LMS, persamaan dari algoritma FXLMS akan berubah karena filter estimasi S’(z) tidak ditempatkan untuk memfilter sinyal referensi, namun ditempatkan di jalur error dan merupakan filter estimasi adjoint dari jalur sekunder S(z).
Gambar 2. ANC Adjoint LMS
Gambar 3. Konversi dari filter FIR umum ke FIR adjoint
Persamaan dari algoritma Adjoint LMS dapat diturunkan menjadi sebagai berikut ) ( ) , ( ) ( ) 2 ( ) 2 ( ) ( ) 1 ( 1 ~ ~ k e k q C n e M n x M n e n w n w
M2 merupakan orde dari filter FIR jalur sekunder
III. Perangkat Percobaan
Pada tugas akhir ini digunakan prosesor DSP TMS320C6713 yang merupakan pengembangan dari DSP TMS320C6701 yang telah digunakan oleh rekan-rekan tugas akhir yang lalu. TMS320C6713 adalah prosesor DSP dari keluarga TMS320C6000 yang berjenis floating point, dengan frekuensi kerja clock hingga 225 MHz dan kecepatan komputasi 1 GFLOPS. Sebagai media sumber bising digunakan blower. Sementara sensor yang digunakan untuk menangkap sinyal dari blower dan menangkap sinyal residu menggunakan mikrofon merk Shure. Lalu sebagai sumber kendali digunakan speaker antinoise. Mikrofon dinamik produksi Shure merupakan tipe Prologue 14H-LC memiliki respon frekuensi 40-13000 Hz (respon flat pada 100-1000 Hz). Sinyal yang ditangkap oleh sensor referensi dan sensor galat dikuatkan terlebih dahulu menggunakan pre-amp baru diproses di dalam DSP. Sinyal kendali keluaran dari DSP juga harus terlebih dahulu dikuatkan dengan
power-amp sebelum dikeluarkan melalui speaker antinoise.
Jenis dari power-amp yang digunakan adalah power-amp jenis LM3876 produksi National Semiconductor. Berikut merupakan konfigurasi dari pemasangan dari DSK TMS320C6713:
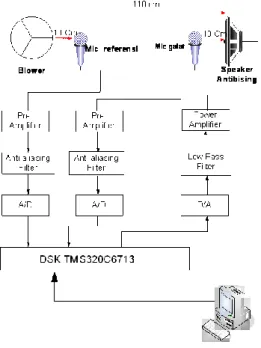
Gambar 4. Konfigurasi Pemakaian DSK TMS320C6713
IV. Simulasi
Untuk membandingkan hasil dari algoritma FXLMS dengan Adjoint LMS dilakukan simulasi menggunakan MATLAB dengan menggunakan imput berupa sinyal acak, fungsi alih jalur primer menggunakan filter FIR dengan jumlah orde 47, fungsi alih jalur skunder menggunakan filter FIR orde 10 didapat melalui hasil identifikasi algoritma LMS, jumlah orde dari filter adaptif adalah 32, dan rate konvergensi 0.008 .
Gambar dibawah merupakan hasil simulasi dari program MATLAB yang memperlihatkan hasil redaman dari sinyal awal dengan menggunakan 1000 iterasi pada algoritma FXLMS dan Adjoint LMS
Gambar 5. ANC dengan algoritma FXLMS
Gambar 6. ANC menggunakan algoritma Adjoint LMS
V. Data dan Analisis
Pertama akan ditentukan identifikasi jalur sekunder dari sistem ANC tersebut. Frekuensi sampling yang digunakan pada tugas akhir ini adalah 8000 Hz. Karakteristik yang cukup ideal adalah jika didapatkan nilai SNR yang cukup besar dan nilai MSE yang cukup kecil Ord e µ Waktu steady state(sam pel) MSE SNR 128 0.007 0.01 0.03 0.05 0.07 25000 23000 15000 17000 20000 2.44e-05 1.36e-05 1.76e-06 2.27e-06 3.25e-06 26.7148 29.2428 38.1409 37.0183 35.4772
Tabel 1 Data identifikasi jalur sekunder
(a)
(b)
Gbr. 7 (a) Perbandingan dari jalur sekunder dengan model dari jalur sekunder
µ = 0,007 (b) Galat identifikasi jalur sekunder µ = 0,007
Pengambilan data dilakukan dengan 2 sumber bising yang berbeda, pertama dengan menggunakan sinyal periodik hasil generasi dari generator sinyal yang direkam dengan frekuensi 125 Hz, dan yang kedua menggunakan sumber bising blower secara real-time.
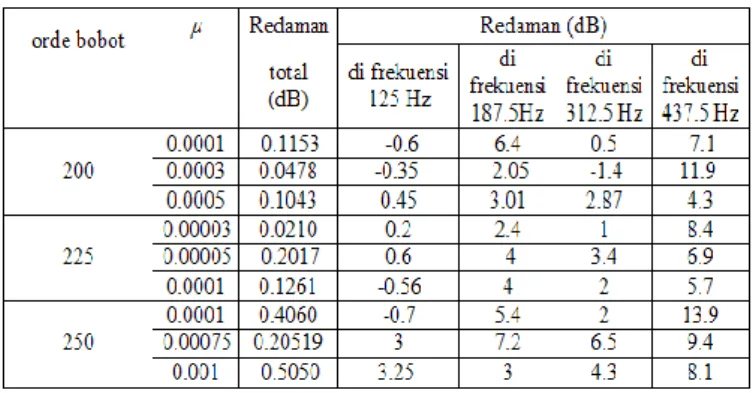
Tabel 2. Hasil percobaan sistem kendali bising aktif menggunakan sinyal periodik 125 Hz
(a)
(b)
Gbr. 8 (a) PSD perbandingan sinyal residu untuk µ = 0,00005 (b) Perkembangan residu superposisi untuk µ = 0,00005
Tabel 3. Hasil percobaan sistem kendalibising aktif menggunakan sinyal blower
(a)
(b)
Gbr. 5.26. (a) PSD perbandingan sinyal residu untuk µ = 0,00005 dan orde bobot 225 (b) Perkembangan residu superposisi untuk µ = 0,00005 dan orde bobot 225 orde bobot µ Redaman(dB) 150 0.00004 22.9693 0.00005 27.5077 0.000075 25.4118
Hasil peredaman dengan menggunakan sumber bising dengan sinyal periodik yang sudah direkam menghasilkan redaman yang sangat baik. Dapat dilihat dari grafik psd pada sistem kendali bising aktif menggunakan sumber bising sinyal periodik dengan frekuensi 125 Hz, redaman yang terjadi pada frekuensi 125 Hz cukup signifikan dengan mencapai redaman melebihi 20 dB, peristiwa ini membuktikan bahwa ANC sangat berguna untuk meredam frekuensi rendah namun pada frekuensi tinggi redaman dari ANC tidak begitu berpengaruh.
Sementara jika menggunakan sumber bising blower, redaman yang didapat sangat kecil. Dapat dilihat pada kurva sistem kendali bising aktif dengan menggunakan sumber bising berupa
blower, ternyata pada frekuensi dominan blower terdapat penurunan tingkat dB yang cukup lumayan namun tidak sebaik jika menggunakan sinyal periodik. Namun untuk frekuensi diatas dari 550 Hz, efek dari ANC semakin tidak terlihat.
Dari tabel terlihat bahwa nilai peredaman mengalami penurunan dibandingkan dengan peredaman yang dilakukan terhadap sinyal bising periodik yang telah direkam terlebih dahulu, hal ini disebabkan banyak variabel yang ikut mempengaruhi ketika bising diredam secara real time misalnya turbulensi udara ataupun getaran rangka besi pada blower yang turut memperkompleks karakteristik dari sinyal bising utama.
VI. Kesimpulan
Algoritma Adjoint LMS dan FXLMS tidak memiliki perbedaan hasil yang cukup besar jika hanya ditinjau dari kecepatan mencapai konvergensi pada sistem 1 kanal.
hasil redaman dari sinyal blower tidak menghasilkan redaman yang baik karena redaman yang di dapat terlalu kecil. Hal ini bisa terjadi karena posisi dari speaker antinoise yang berjauhan dari sumber bising, padahal pada ruangan bebas sebaiknya posisi dari sumber kendali sebaik mungkin diletakkan di dekat sumber bising. Selain itu kesalahan juga dapat terjadi dari penempatan posisi mikrofon galat yang tidak sesuai sehingga tidak menghasilkan kendali yang optimal. Masalah koherensi dan korelasi juga sangat penting untuk di perhatikan karena bisa jadi sinyal dari sumber bising tidak sama dengan sumber kendali sehingga sewaktu terjadi superposisi malah memperkuat bising.
VII. Referensi
S.M. Kuo and D.R.Morgan, Active Noise Control Systems:Algorithm and DSP Implementations. New York:Wiley, 1996
Kuo, Sen M., Design of Active Noise Control Systems with TMS320 Family, Texas Instrument, Application Report, 1996.
Eric. A Wan. “Adjoint LMS: An efficient alternative to the Filtered-X LMS and Multiple Error LMS algorithms” in Proc. IEEE ICASSP, 1996, pp.1842-1845
Proakis, John G., Manolakis, Dimitris G., Digital Signal Processing:
Princi-ples, Algorithms, and Applications,
Prentice-Hall, Englewood Cliffs, NJ, 1996.