tqFpCB9tj0h9xpCjsk1EeD247EknAg2k1ugM1i4m
Teks penuh
Gambar

Garis besar
Dokumen terkait
Mesin mobil yang menggunakan sistem pendingin air menggunakan thermostat sebagai pengatur suhu. Thermostat berfungsi sebagai katub/keran aliran air dari mesin ke radiator.
3. Katup isap pada sistem EFI berfungsi untuk ....A. mengatur pemasukan udara B. mengatur pemasukan bahan bakar C. mengatur pemasukan campuran bahan bakar dan udara D. mengatur jumlah udara
2) Control Valve, berfungsi sebagai elemen kontrol akhir dalam sistem pengendalian. Besarnya bukaan valve diatur pada controller. Berfungsi untuk mengatur laju alir
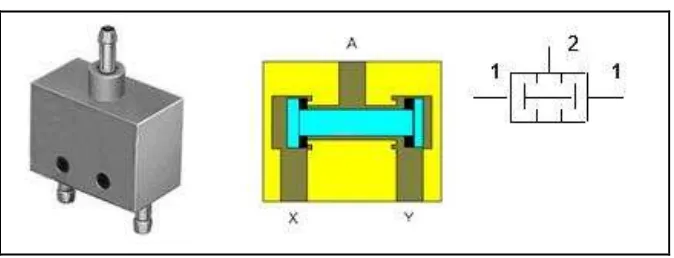
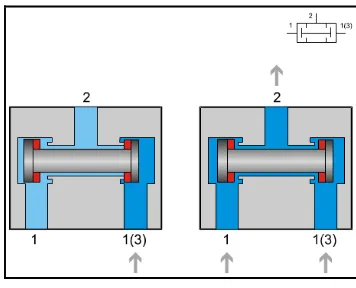
Katup kontrol balik fungsi arah aliran/fungsi ATAU (shuttle valve) berfungsi untuk mengontrol arah aliran satu arah atau dua sumber tekanan yang masuk.. Gambar 1.2
Secrup ini berfungsi untuk mengatur jumlah aliran udara yang masuk ke ruang silinder sehingga diperoleh campuran yang tepat pada saat engine putaran langsam..
WILMAR NABATI INDONESIA 4.1 Pengertian dan Jenis-Jenis Valve 4.1.1 Pengertian Valve Valve katup adalah suatu perangkat yang berfungsi untuk mengatur dan mengarahkan serta
BAB 4 MAINTENANCE BUTTERFLY VALVE NIAGARA FILTER 4.1 Pengertian dan Jenis-Jenis Valve 4.1.1 Pengertian Valve Valve katup adalah suatu perangkat yang berfungsi untuk mengatur dan
Ada beberapa faktor yang menyebabkan terjadinya kerusakan pada Ring Piston tengah,ruang Katub hisap section valve adalah: a Kurangnya Pelumasan Penyebab menurunnya produksi udara
