BAB 2
TINJAUAN PUSTAKA
Dalam sistem tenaga listrik dikenal dua jenis beban yaitu beban linier dan
beban non linier. Beban linier adalah beban yang memberikan bentuk gelombang
keluaran yang linier artinya arus yang mengalir sebanding dengan impedansi dan
perubahan tegangan. Sedangkan beban non linier adalah bentuk gelombang keluaran
yang tidak sebanding dengan impedansi tegangan masuk dalam setiap setengah
putarannya sehingga bentuk gelombang arus maupun tegangan keluarannya tidak
sama dengan gelombang masukannya ( mengalami distorsi).
Beban non linier dibangkitkan oleh komponen semikonduktor pada peralatan
elektronik seperti televisi, komputer, lampu hemat energi,mixer, AC, dan peralatan
rumah tangga lainnya, dalam proses kerja peralatan elektronik ini berlaku sebagai
saklar yang bekerja pada setiap siklus gelombang dari tegangan [1].
2.1. Juicer
Juicer adalah suatu alat rumah tangga yang digunakan untuk menghancurkan
buah menjadi minuman yang bernama jus atau dalam bahasa inggrisnya juice. Beban
juicer menghasilkan sumber arus harmonisa (IHDi) pada orde ke-3 yang
dibangkitkan dari motor universal satu fasa pada juicer. Peralatan juicer terdiri dari
parutan yang terbuat dari logam besi, prinsip kerjanya sama dengan motor induksi,
kemudian di pangkal atau dibawahnya tersedia mangkuk untuk menampung sari buah
Gambar 2.1. Juicer
Perabotan rumah tangga ini biasanya digunakan oleh ibu rumah tangga
disaat menyiapkan hidangan makanan dengan membuat jus sebagai pelengkap
makanan sehingga jus buah tersebut sangat berguna bagi kesehatan khususnya bagi
anak – anak atau orang tua sehingga daya tahan tubuh meningkat. Sistem kerja juicer
dengan menggunakan motor universal yang digunakan satu fasa.
2.1.1. Motor universal
Motor universal sama dengan motor satu fasa. Motor ini terdiri dari
kumparan stator dan kumparan rotor. Stator adalah bagian dari motor yang tidak
bergerak dan rotor adalah bagian yang bergerak yang bertumpu pada bantalan poros
L
R
VAC
220-230V
50-60Hz
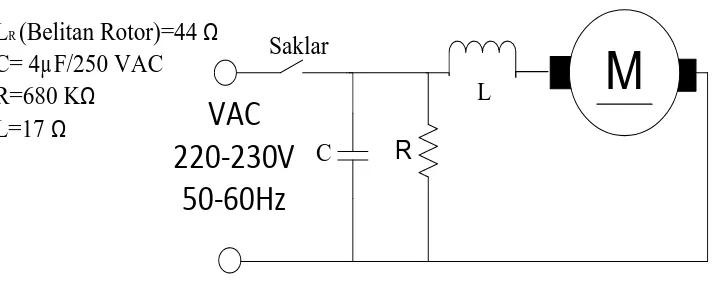
C Saklar LR (Belitan Rotor)=44 Ω
C= 4µF/250 VAC R=680 KΩ L=17 Ω
M
Gambar 2.2. Rangkaian Juicer
Motor universal terdiri atas kumparan – kumparan stator dan rotor yang
berfungsi membangkitkan gaya gerak listrik akibat dari adanya arus listrik bolak –
balik satu fasa yang melewati kumparan – kumparan tersebut sehingga terjadi suatu
interaksi induksi medan magnet antara stator dan rotor.
Dari peralatan satu fasa yang terdapat motor universal menimbulkan
harmonisa ketiga akibat induksi motor antara belitan motor dan rotor, sehingga terjadi
peningkatan arus pada netral sumber [13].
2.2. Harmonisa
Harmonisa adalah suatu komponen sinusiodal dari gelombang berkala yang
mempunyai suatu frekuensi yang merupakan kelipatan dari frekuensi dasarnya yang
. Hr Gambar 2.3. Bentuk gelombang harmonisa pertama sampai ketiga
Dalam Gambar 2.3 tersebut dapat dilihat harmonisa ke 3 merupakan
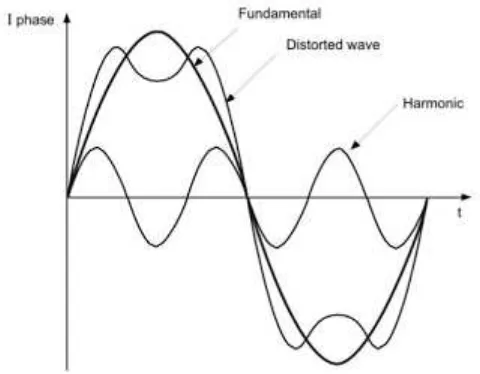
kelipatan dari frekuensi dasar, dan pada Gambar 2.4 dapat dilihat gabungan frekuensi
dasar dan frekuensi yang telah terharmonisasi akibat beban non linier. Besar daya
beban non linier yang menarik arus dari sumber melalui impedansi jaringan sangat
mempengaruhi distorsi gelombang tegangannya.
Gambar 2.4. Gelombang dasar, harmonisa, dan gelombang terdistorsi Frekuensi
2.3. Perhitungan Harmonisa
Untuk menentukan besar Total Harmonic Distortion (THD) dari perumusan
analisa deret fourier untuk tegangan dan arus dalam fungsi waktu yaitu [12]:
�(�) =��+∑∞�=1�����(���+��) ... (2.1)
�(�) =��+∑∞�=1�����(���+��) ... (2.2)
Tegangan dan arus RMS dari gelombang sinusoidal yaitu nilai puncak
gelombang dibagi √2 dan secara deret fourier untuk tegangan dan arus yaitu: [13]
���� = ��2+�∑ �√��2�
Pada umumnya untuk mengukur besar harmonisa yang disebut dengan Total
Harmonic Distortion (THD). Untuk THD tegangan dan arus didefenisikan sebagai
nilai RMS harmonisa urutan diatas frekuensi fundamental dibagi dengan nilai RMS
pada frekuensi fundamentalnya, dan tegangan dc nya diabaikan.
Besar Total Harmonic Distortion (THD) untuk tegangan dan arus yaitu:
Individual Harmonic Distortion (IHD) adalah perbandingan nilai RMS pada
orde harmonisa terdistorsi terhadap nila RMS pada frekuensi fundamental yaitu:
���� =
Dimana: Vh = Tegangan harmonisa pada orde terdistorsi
Ih = Arus harmonisa pada orde terdistorsi
Hubungan Persamaan IHD dengan arus RMS dari Persamaan (2.8) yaitu:
����2 = 12�2� ... (2.9)
Selanjutnya dari Persamaan (2.9) yaitu:
�2
Sehingga arus RMS terhadap IHDi yaitu:
����2 = �1 ���2��1 +����2� ... (2.13)
2.4. Pengaruh Harmonisa
Dari peralatan listrik non linier dapat menyebabkan transformator distribusi
mengalami penurunan kinerja dan kerusakan. Dampak umum dari gangguan
harmonisa ketiga yang dibangkitkan oleh peralatan satu fasa. Pada keadaan normal,
arus beban setiap fasa dari beban linier yang seimbang pada frekuensi dasarnya akan
saling menghapuskan sehingga arus netralnya menjadi nol. Sebaliknya beban non
linier satu fasa akan menimbulkan kelipatan tiga ganjil yang disebut tripple harmonik
(harmonik ke-3, ke-9, ke-15 dan seterusnya) yang disebut zero sequence harmonic,
dapat dilihat pada Tabel 2.1.
Tabel 2.1 Polaritas dari komponen harmonisa
Harmonik 1 2 3 4 5 6 7 8 9
Frekuensi (Hz) 50 100 150 200 250 300 350 400 450
Urutan + - 0 + - 0 + - 0
Harmonisa pertama urutan polaritas adalah positif, harmonisa kedua urutan
polaritas adalah negatif, harmonisa ketiga polaritasnya adalah nol, dan harmonisa
keempat adalah positif (berulang berurutan sampai seterusnya).
Pengaruh harmonisa yang ditimbulkan dari polaristas komponen harmonisaa
yaitu tingginya arus polaritas nol pada arus netral di transformator distribusi sistem 3
fasa 4 kawat, dapat dilihat pada Tabel 2.2.
Tabel 2.2 Pengaruh polaritas harmonisa
Polaritas Dampak harmonisa
Positif -Panas
Negatif -Panas
-Menghambat atau memperlambat putaran motor
Nol -Panas
Besarnya harmonisa yang dihasilkan oleh beban non liner dapat menganggu
jaringan dan sistem tenaga listrik. Oleh karena itu, harus dilakukan peredaman
harmonisa dengan cara mem-filter harmonisa.
Secara garis besar ada beberapa cara untuk meredam harmonisa yang
ditimbulkan oleh beban non linier, yaitu [14]:
a. Penggunaan filter pasif pada tempat yang tepat, terutama pada daerah
yang dekat dengan sumber pembangkit harmonisa sehingga arus
harmonisa tereduksi di sumber dan mengurangi peyebaran arusnya.
b. Penggunaan filter aktif.
c. Kombinasi filter aktif dan pasif.
Sistem diatas dapat meredam harmonisa, dan memperbaiki faktor daya yang
rendah pada sistem. Jika perbaikan faktor daya langsung dipasang kapasitor terhadap
sistem yang mengandung harmonisa, maka akan menyebabkan amplitudo pada
harmonisa tertentu akan membesar, proses ini diakibatkan terjadinya resonansi antara
kapasitor yang dipasang dengan reaktansi induktif sistem.
2.5. Filter Pasif
Pada peralatan rumah tangga khususnya juicer, untuk mengatasi IHDi
aplikasi filter pasif merupakan metode penyelesaian yang efektif dan ekonomis. Filter
pasif dirancang untuk mengalihkan arus harmonisa pada bagian tertentu yang tidak
diinginkan dalam sistem tenaga. Rangkaian filter pasif terdiri dari komponen R, L
dan resistor. Kapasitor dihubungkan seri atau paralel untuk memperoleh sebuah total
rating arus dan VAR yang diinginkan. Sedangkan induktor digunakan dalam
rangkaian filter dirancang mampu menahan selubung frekuensi tinggi yaitu efek kulit
(skin effect) [15].
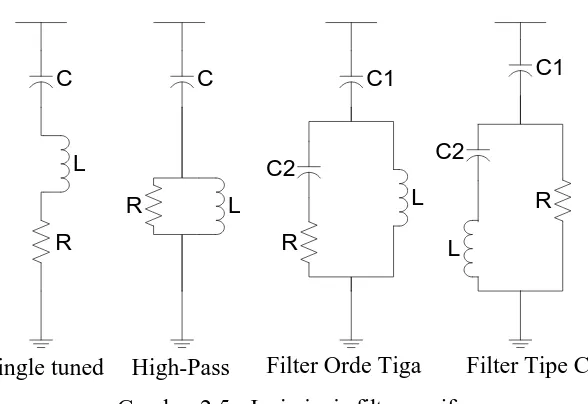
Gambar 2.5 memperlihatkan beberapa jenis filter pasif yang umum beserta
konfigurasi dan impedansinya. Filter single-tuned dan filter orde tiga adalah yang
paling umum digunakan [5].
C
L
R
C
R L
C1
R C2
L
C1
C2
R
L
Single tuned High-Pass Filter Orde Tiga Filter Tipe C
Gambar 2.5. Jenis-jenis filter pasif
Pada peralatan juicer ini, IHDi dominan muncul pada harmonisa ke-3, oleh
karena itu IHDi perlu dikurangi agar tidak mengganggu peralatan yang lain.
mengatasi masalah harmonisa, filter pasif yang digunakan adalah filter single-tuned
dan filter orde tiga. Filter umum ini biasa digunakan pada tegangan rendah.
Prinsip kerja dari filter pasif adalah mengalirkan arus harmonisa orde
tertentu dari sumber harmonisa (beban non linier) melalui jaringan filter. Untuk
memaksa arus orde tertentu mengalir ke jaringan filter, besar kapasitor harus diatur
agar terjadi resonansi pada jaringan, sehingga harga impedansi saluran akan
minimum karena hanya tinggal komponen resistansi saja. Disamping dapat
mengurangi harmonisa, filter single-tuned dan filter orde tiga juga dapat memperbaiki
power factor.
Keuntungan yang dapat diperoleh dari penggunaan filter pasif antara lain:
1. Desain sederhana dan murah
2. Dapat difungsikan sebagai kompensator energi reaktif
Disamping keuntungan, filter pasif juga kekurangan seperti:
1. Impedansi sumber mempengaruhi karakteristik kompensasi filter
2. Sensitif terhadap perubahan komponen LC dan variasi frekuensi pada
jaringan
3. Dapat menyebabkan resonansi seri dan paralel dengan impedansi jaringan
yang mengakibatkan penguatan harmonisa pada frekuensi tertentu.
2.6. Batasan Harmonisa
Secara umum, mengurangi harmonisa tidaklah harus mengeliminasi semua
harmonisa yang ada, tetapi cukup dengan mereduksi sebagian harmonisa tersebut
sehingga diperoleh nilai dibawah standar yang diizinkan. Secara teknis, bertujuan
ekonomis tidak membutuhkan biaya yang besar. Standar yang digunakan sebagai
batasan harmonisa adalah yang dikeluarkan oleh International Electrotechnical
Commission (IEC) 61000-3-2 kelas D yang mengatur batasan harmonisa pada beban
beban kecil satu fasa ataupun tiga fasa. Hal ini disebabkan karena belum adanya
standar baku yang dihasilkan oleh IEEE.
Pada standar IEC 61000-3-2 kelas D, beban kecil tersebut diklasifikasikan
dalam kelas A, B, C, dan D, dimana masing-masing kelas mempunyai batasan
harmonisa yang berbeda beda yang dijelaskan sebagai berikut: [14]
1) Kelas A
Kelas ini merupakan semua peralatan penggerak motor dan semua peralatan
3 fasa yang arusnya tidak lebih dari 16 ampere perfasanya. Semua peralatan yang
tidak termasuk dalam 3 kelas yang lain dimasukkan dalam kategori kelas A. Batasan
arus harmonisanya hanya didefinisikan untuk peralatan satu fasa (tegangan kerja
230V) dan tiga fasa (230/400V) dimana batasannya dapat dilihat pada Tabel 2.3.
Tabel 2.3. Batasan arus harmonisa untuk peralatan kelas A
2) Kelas B
Kelas ini meliputi semua peralatan tool portable yang batasan arus
harmonisanya merupakan harga absolut maksimum dengan waktu kerja yang singkat
seperti pada Tabel 2.4.
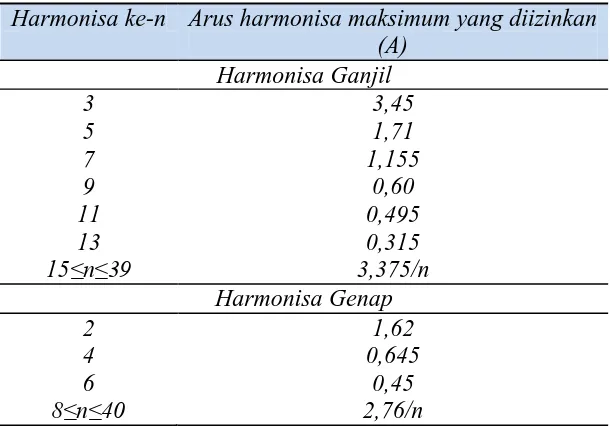
Tabel 2.4. Batasan arus harmonisa untuk peralatan kelas B
Harmonisa ke-n Arus harmonisa maksimum yang diizinkan (A)
Harmonisa Ganjil
3 3,45
5 1,71
7 1,155
9 0,60
11 0,495
13 0,315
15≤n≤39 3,375/n
Harmonisa Genap
2 1,62
4 0,645
6 0,45
8≤n≤40 2,76/n
3) Kelas C
Kelas C termasuk didalamnya semua peralatan penerangan dengan daya
input aktifnya lebih besar 25 watt. Batasan arusnya diekspresikan dalam bentuk
persentase arus fundamental. Persentase arus maksimum yang diperbolehkan untuk
Tabel 2.5. Batasan arus harmonisa untuk peralatan kelas C
Harmonisa ke-n Arus harmonisa maksimum yang diizinkan (% fundamental)
2 2
3 30xPF rangkaian
5 10
7 7
9 5
11≤n≤39 3
4) Kelas D
Termasuk semua jenis peralatan yang dayanya dibawah 600 watt khususnya
peralatan rumah tangga. Batasan arusnya diekspresikan dalam bentuk mA/W dan
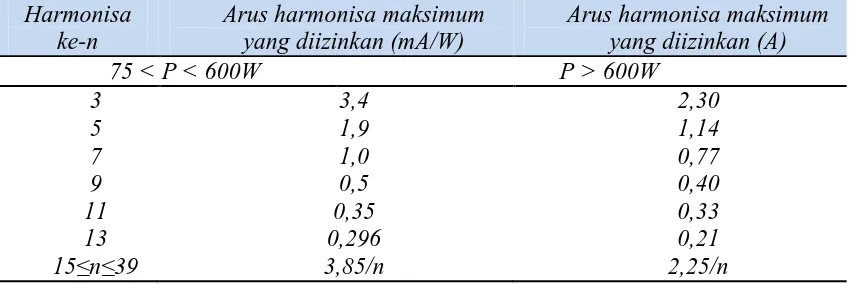
dibatasi pada harga absolut yang nilainya diperlihatkan oleh Tabel 2.6.
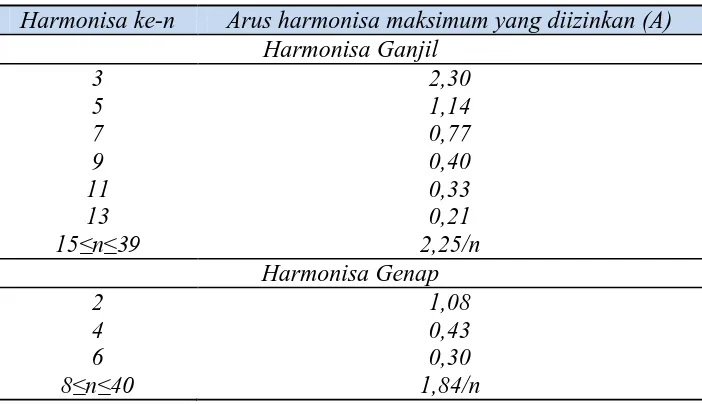
Tabel 2.6. Batasan arus harmonisa untuk peralatan kelas D
Harmonisa ke-n
Arus harmonisa maksimum yang diizinkan (mA/W)
Arus harmonisa maksimum yang diizinkan (A)
75 < P < 600W P > 600W
3 3,4 2,30
5 1,9 1,14
7 1,0 0,77
9 0,5 0,40
11 0,35 0,33
13 0,296 0,21
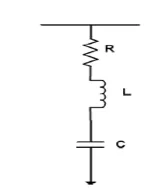
2.7. Filter single tuned
Filter single tuned adalah filter yang terdiri dari komponen-komponen pasif
R, L dan C terhubung seri, seperti pada Gambar 2.6. Untuk mengatasi harmonisa di
dalam sistem tenaga listrik industri yang paling banyak digunakan adalah pasif filter
single tuned [15].
Gambar 2.6. Filter single tuned
Berdasarkan Gambar 2.6 besarnya impedansi filter single tuned pada
frekuensi fundamental adalah [12]:
�� =�+�(��− ��) ... (2.14)
Pada frekuensi resonansi, persamaan (2.14) menjadi:
�� =�+�(��� −�1��) ... (2.15)
Jika frekuensi sudut saat resonansi adalah:
�� = 2��0 ℎ� ... (2.16)
Impedansi filter dapat ditulis sebagai berikut:
�� =�+�(2��0 ℎ�� − 1 2��0 ℎ��)
... (2.17)
Saat resonansi terjadi nilai reaktansi induktif dan reaktansi kapasitif sama
besar, maka diperoleh impedansi filter single tuned adalah:
�� =� ... (2.19)
Filter single tuned mempunyai impedansi yang kecil, sehingga arus
harmonisa akan dialirkan atau dibelokkan melalui filter single tuned dan tidak
mengalir ke sistem. Frekuensi respon dan sudut fasa dari filter single tuned pada
contoh di Gambar 2.7 (a) dan (b), dimana dapat dilihat bahwa pada frekuensi
harmonisa atau orde ke-5 dari harmonisa (fr = 250 Hz), impedansi filter single tuned
sangat kecil [13].
(a) Frekuensi Respon Single tuned Filter
(b) Sudut Fasa Fungsi Orde Harmonisa
Dengan demikian filter single tuned diharapkan dapat mengurangi
individual harmonisa arus (IHDi) dan individual harmonisa tegangan (IHDv) dapat
diperbaiki 30% sampai 50% sehingga menjadi dibawah standart IEC 61000-3-2 kelas
D. Besarnya tahanan R dari induktor dapat ditentukan oleh faktor kualitas dari
induktor. Faktor kualitas (Q) adalah kualitas listrik suatu induktor, secara matematis
Q adalah perbandingan nilai reaktansi induktif atau reaktansi kapasitif dengan nilai
tahanan resitor (R). Semakin besar nilai Q yang dipilih maka semakin kecil nilai R
dan semakin bagus kualitas dari filter yang diharapkan mencapai 100 % dimana
energi yang dikonsumsi oleh filter akan semakin kecil, artinya rugi-rugi panas filter
adalah kecil [12][20].
Pada frekuensi tuning:
���=�1��= �� ... (2.20)
Faktor kualitas:
�= ��
� ... (2.21)
atau
� =��
� ... (2.22)
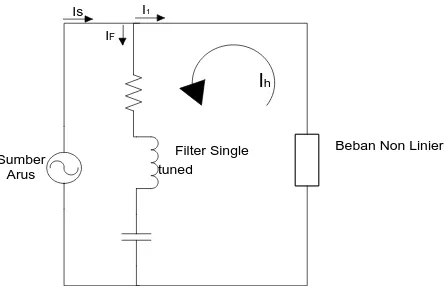
2.8. Prinsip Pereduksian Harmonisa Dari Filter Single-Tuned
Filter single tuned yang diletakkan secara paralel akan men-short circuit-kan
arus harmonisa yang ada dekat dengan sumber distorsi. Ini dilakukan untuk menjaga
listrik. Filter single tuned yang merupakan hubungan seri komponen R, L, dan C
memberikan keuntungan tersendiri bagi sistem tenaga listrik, disamping mampu
mereduksi tigkat harmonisa, penggunaan kapasitor dapat memperbaiki cos φ sistem,
sedangkan induktor berfungsi sebagai filter dan juga melindungi kapasitor dari over
kapasitif akibat adanya resonansi. Sebuah rangkaian filter single tuned dipasang pada
frekuensi harmonisa sebagai filter, pemasangannya secara paralel dengan peralatan
yang mendistorsikan harmonisa. Filter single-tuned akan mempunyai impedansi yang
kecil pada frekuensi resonansi sehingga arus yang memiliki frekuensi yang sama
dengan frekuensi resonansi akan dibelokkan melalui filter seperti pada Gambar 2.8
[16].
Sumber Arus
Beban Non Linier Filter Single
tuned I1
Is
IF
Ih
Gambar 2.8. Prinsip Pereduksian Harmonisa
Kualitas dari sebuah filter (Q) adalah ukuran ketajaman penyetelan filter
dalam mereduksi harmonisa. Dalam filter Single-Tuned, faktor kualitas Q
didefinisikan sebagai perbandingan antara induktansi atau kapasitansi terhadap
harmonisa dengan simulasi MATLAB/Simulink, dimana gelombang harmonisa
menjadi berkurang distorsinya.
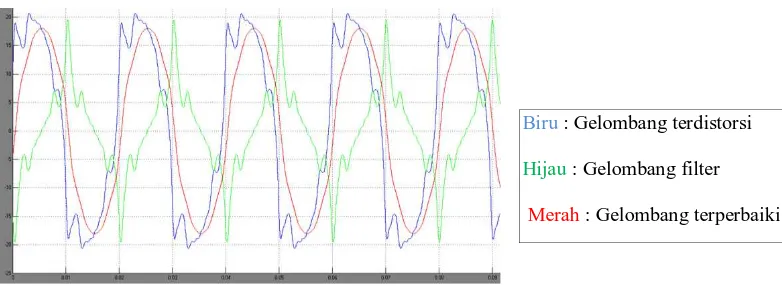
Gambar 2.9. Kompensasi gelombang filter
Hasil simulasi MATLAB/Simulink dapat menjelaskan proses eliminasi
gelombang arus terdistorsi dimana distorsi gelombang arus yang terjadi akibat beban
non linier seperti yang ditunjukkan pada gelombang warna biru. Setelah kapasitor
dan induktor yang digunakan sebagai filter untuk memperbaiki gelombang warna biru
dengan sinyal gelombang warna hijau, sehingga menghasilkan gelombang yang
terperbaiki seperti yang ditunjukkan gelombang warna merah dengan tingkat distorsi
gelombang mendekati bentuk sinusoidal. Dengan demikian tingkat distorsi
gelombang dapat diperbaiki oleh induktor dan kapasitor.
2.9. Merancang Filter Single-Tuned
Merancang filter Single tuned yang terdiri dari hubungan seri
komponen-komponen pasif induktor, kapasitor dan tahanan, adalah bagaimana menentukan
besarnya komponen-komponen dari filter tersebut [17].
Biru : Gelombang terdistorsi
Hijau : Gelombang filter
Langkah-langkah rancangan Filter single tuned adalah:
a. Tentukan ukuran kompensasi kapasitor ΔQ berdasarkan kebutuhan daya
reaktif untuk perbaikan faktor daya. Kompensasi kapasitor ( Δ�) adalah:
Δ�= �{tan(���−1��
1)− tan(���−1��2)} ... (2.23)
Dimana:
P = beban (kW)
pf1 = faktor daya mula-mula sebelum diperbaiki
pf2 = faktor daya setelah diperbaiki
b. Tentukan Reaktansi kapasitor (��):
�� = �
2
Δ� ... (2.24)
c. Tentukan Kapasitansi dari kapasitor (�):
�= 1
2 ��0��
... (2.25)
d. Tentukan Reaktansi Induktif dari Induktor (��):
�� =�ℎ��2 ... (2.26)
e. Tentukan Induktansi dari Induktor (�):
�= ��
2 ��0
... (2.27)
f. Tentukan reaktansi karakteristik dari filter (��):
�� =ℎ� �� ... (2.28)
g. Tentukan Tahanan (�) dari Induktor:
� =��
Gambar 2.10. Segitiga daya untuk menentukan kebutuhan daya reaktif Q
Untuk menentukan kebutuhan daya reaktif dapat digambarkan dalam bentuk
segitiga daya seperti Gambar 2.10 [18].
Daya Semu (VA):
�=�.� ... ( 2.30)
Daya Aktif (Watt):
�= �.�. cosφ ... (2.31)
Daya Reaktif (VAR):
�= �.�. sinφ ... (2.32)
Faktor daya umumnya dinyatakan dalam bentuk Cos φ yang besarnya yaitu:
��= cosφ= � (����)
� (��) ... (2.33)
Dimana: cos φ: Faktor daya
Kebutuhan daya reaktif dapat dihitung dengan pemasangan kapasitor untuk
memperbaiki faktor daya beban. Komponen daya aktif (P) umumnya konstan, daya
semu (S) dan daya reaktif (Q) berubah sesuai dengan faktor daya beban.
Daya Reaktif (Q) = Daya Aktif (P) tan φ ... (2.34)
�1 �2
�1 �1(��)
�2(��)
�2
P(wat
Dengan merujuk vektor segitiga daya Gambar 2.10, maka
Daya Reaktif pada pf awal yaitu:
Q1 = P tan φ1 ... ( 2.35)
Daya Reaktif pada PF diperbaiki yaitu:
Q2 = P tan φ2 ... (2.36)
Sehingga rating kapasitor yang diperlukan untuk memperbaiki faktor daya adalah
ΔQ= Q1 - Q2 atau:
ΔQ = P(tan �1-����2) ... (2.37)
Besar nilai ΔQ yang didapat, selanjutnya menentukan nilai reaktansi
kapasitif yang besarnya ditentukan berdasarkan Persamaan (2.24) dan besar nilai
kapasitansi kapasitor yang dibutuhkan untuk memperbaiki faktor daya pada
Persamaan (2.25).
2.10. Filter Orde Tiga
Filter pasif orde tiga ini adalah salah satu filter yang akan digunakan untuk
mengurangi harmonisa akibat beban non-linier, rangkaiannya terdiri dari R, L dan 2C
C1
R C2
L
Gambar 2.11. Filter Orde tiga
Langkah – langkah untuk merancang filter orde tiga:
Menentukan Reaktansi X
C1 dapat dihitung dari kompenasai daya reaktif ΔQ yang dibutuhkan serta tegangan sumber V pada frekuensi fundamental dengan
persamaan:
Parameter – parameter lainnya harus memenuhi kondisi sebagai berikut:
1. Resistansi filter pada harmonisa ke – h sama dengan RF.
2. Reaktansi filter pada harmonisa ke – h sama dengan nol.
3. XC2 = mXC1 dimana m diambil dalam hubungan antara XC1 dan XC2 .
Untuk mengurangi nilai KV(h) pada harmonisa yang ditentukan, filter harus
mempunyai nilai resistansi sebesar RF. KV(h) adalah norma untuk indeks KV. Nilai
dari RF dapat dihitung dengan persamaan:
�� = ��(ℎ)
(��−��(ℎ))�g��2 +���2
Dimana:
KV = total distorsi hamonisa pada frekuensi fundamental KV(h) = total distorsi harmonisa pada harmonisa ke – h Gns, bns = konduktansi & suseptansi dari titik filter dipasang
Impedansi dari filter orde tiga pada harmonisa ke-h dapat dituliskan seperti
persamaan:
��(ℎ) =�+ �(ℎ��ℎ��(�−�ℎ��−ℎ���2)
2)− ���1
... (2.41)
Kemudian di transformasikan Zf (h), dengan memisahkan antara bagian real
dengan bagian imajiner sehingga menjadi:
��(ℎ) = ��ℎ��
Sesuai dengan kondisi 1 dan 2 bahwa bagian imajiner Zf(h) pada harmonisa
ke-h adalah sama dengan nol, maka bagian real adalah sama dengan RF. Setelah
ditransformasikan bagian real dan imajiner Zf(h) dapat direpresentasikan menjadi dua
persamaan sistem yaitu:
� (ℎ��2)− ���2− �
�(ℎ���2 2) = 0 ... (2.43)
�2(ℎ�
��1)−{(ℎ��)(ℎ��2)(ℎ���2)}−{(ℎ��1)(ℎ���2 2)} = 0 .... (2.44)
Setelah memecahkan persamaan (2.43, 2.44), persamaan disederhanakan
dengan persamaan XC2 = mXC1 , sehingga diperoleh persamaan:
� =�F{ℎ2��−�(ℎ��1)}
ℎ�� =(−�±√�2−4��)
Dalam Persamaan (2.45) dan (2.46), nilai m tidak diketahui, untuk mencari
nilai m digunakan kondisi C1 >> C2 dan ekspresi dibawah tanda akar persamaan
(2.46) adalah positif, yaitu: B2 - 4AC >0, sehingga diperoleh nilai interval m sebagai
berikut:
Persamaan (2.47) menunjukkan bahwa hubungan antara XC1 dan XC2
ditentukan oleh nilai XC1 dan RF pada harmonisa dimana filter dipasang.
��1 = �
Dengan demikian parameter-parameter dari filter pasif orde tiga ditentukan