VIRTUAL INERTIA CONTROL (VIC) BERBASIS
SUPERCONDUCTING MAGNETIC ENERGY STORAGE
(SMES) UNTUK MEMPERBAIKI KESTABILAN
FREKUENSI DIAKIBATKAN PENETRASI
PEMBANGKIT ENERGI BARU TERBARUKAN
LAPORAN TUGAS AKHIR
Oleh:
Syailendra Andi
102116011
FAKULTAS TEKNOLOGI INDUSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
2020
V
IR
TU
A
L INER
TIA
C
ON
TROL
(V
IC
)
B
E
RBASI
S
S
UP
E
R
C
O
ND
UCTING
MA
GN
E
TI
C
ENERGY
STO
RA
G
E
(
S
M
ES
) U
N
TUK
M
E
M
PERB
AIKI K
E
S
T
ABIL
AN
FR
E
KUE
NSI
Syaile
ndr
a A
ndi
102116011
VIRTUAL INERTIA CONTROL (VIC) BERBASIS
SUPERCONDUCTING MAGNETIC ENERGY STORAGE
(SMES) UNTUK MEMPERBAIKI KESTABILAN
FREKUENSI DIAKIBATKAN PENETRASI
PEMBANGKIT ENERGI BARU TERBARUKAN
LAPORAN TUGAS AKHIR
Oleh:
Syailendra Andi
102116011
FAKULTAS TEKNOLOGI INDUSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
2020
Universitas Pertamina - i
LEMBAR PENGESAHAN
Judul Tugas Akhir
:
Virtual Inertia Control
(VIC)
Berbasis
Superconducting Magnetic
Energy Storage
(SMES) Untuk
Memperbaiki Kestabilan Frekuensi
Diakibatkan Penetrasi Pembangkit
Energi Terbarukan
Nama Mahasiswa
:
Syailendra Andi
Nomor Induk Mahasiswa
:
102116011
Program Studi
:
Teknik Elektro
Fakultas
:
Fakultas Teknologi Industri
Tanggal Lulus Sidang Tugas Akhir
:
5 Agustus 2020
Jakarta, 18 Agustus 2020
MENGESAHKAN
Pembimbing I
:
Nama
: Dr. Eng. Muhammad Abdillah, S.T., M.T.
NIP
: 116153
Pembimbing II :
Nama
: Teguh Aryo Nugroho, S.T., M.T.
NIP
: 116054
MENGETAHUI
Ketua Program Studi Teknik Elektro
Dr. Eng. Wahyu Kunto Wibowo, S.T., M.Eng.
NIP. 116059
Universitas Pertamina - iii
LEMBAR PERNYATAAN
Dengan ini saya menyatakan bahwa Tugas Akhir berjudul
Virtual Inertia Control
(VIC) Berbasis
Superconducting Magnetic Energy Storage
Untuk Memperbaiki
Kestabilan Frekuensi Diakibatkan Penetrasi Pembangkit Energi Baru Terbarukan
ini adalah benar-benar merupakan hasil karya saya sendiri dan tidak mengandung
materi yang ditulis oleh orang lain kecuali telah dikutip sebagai referensi yang
sumbernya telah dituliskan secara jelas sesuai dengan kaidah penulisan karya
ilmiah.
Apabila dikemudian hari ditemukan adanya kecurangan dalam karya ini, saya
bersedia menerima sanksi dari Universitas Pertamina sesuai dengan peraturan yang
berlaku.
Demi pengembangan ilmu pengetahuan, saya menyetujui untuk memberikan
kepada Universitas Pertamina hak bebas royalti nonekslusif (
non-exclusive
royalty-free right
) atas Tugas Akhir ini beserta perangkat yang ada. Dengan hak bebas
royalti nonekslusif ini Universitas Pertamina berhak menyimpan, mengalih
media/format-kan, mengelola dalam bentuk pangkatan data (
database
), merawat,
dan mempublikasikan Tugas Akhir saya selama tetap mencantumkan nama saya
sebagai penulis/pencipta dan sebagai pemilik Hak Cipta.
Demikian pernyataan ini saya buat dengan sebenarnya.
Jakarta, 27 Juli 2020
Yang membuat pernyataan,
Universitas Pertamina - v
ABSTRAK
Syailendra Andi. 102116011
.
Virtual Inertia Control
Berbasis
Superconducting
Magnetic Energy Storage
Untuk Memperbaiki Kestabilan Frekuensi Diakibatkan
Penetrasi Pembangkit Energi Baru Terbarukan.
Perkembangan industri yang pesat membutuhkan lebih banyak energi untuk
mendukung semua proses industrinya. Penggunaan energi konvensional tidak
ramah terhadap alam karena dapat merusak keadaan lingkungan. Transformasi dari
penggunaan energi konvensional ke penggunaan sumber energi terbarukan semakin
disosialisasikan di seluruh dunia. Namun, keberadaan energi terbarukan
menimbulkan tantangan baru dalam dunia sistem kelistrikan. Nantinya, pembangkit
energi terbarukan akan diintegrasikan dengan sistem kelistrikan yang sudah ada.
Namun, pembangkitan energi terbarukan memberikan pengaruh yang besar dalam
menurunkan nilai inersia (
inertialess
) sistem tenaga listrik yang menyebabkan
osilasi frekuensi dan menuju keadaan ketidakstabilan frekuensi. Untuk mengatasi
masalah ini,
virtual inertia control
(VIC) berbasis sistem penyimpanan energi
digunakan untuk mengakomodasi efek integrasi energi terbarukan ke dalam sistem
tenaga listrik. Salah satu sistem penyimpanan energi yang digunakan adalah
superconducting magnetic energy storage
(SMES). SMES merupakan sistem
penyimpanan energi yang memiliki respon cepat dan tingkat efisiensi hingga 90%.
Model sistem tenaga dua area digunakan dimana terdiri dari
automatic generation
control
(AGC) pada setiap area, beban, pembangkit listrik termal, dan pembangkit
listrik tenaga angin di area satu. Dari hasil simulasi, VIC berbasis SMES berhasil
mereduksi osilasi frekuensi dengan mengompresi
overshoot
sistem dan
menurunkan
settling time
menuju
steady-state
. Untuk penelitian di masa
mendatang, pendekatan kecerdasan buatan (AI) dapat digunakan untuk
mengoordinasikan pengontrol AGC dan VIC untuk menyediakan lebih banyak
redaman osilasi frekuensi.
Universitas Pertamina - vi
ABSTRACT
Syailendra Andi. 102116011. Virtual Inertia Control Based on Superconducting Magnetic Energy Storage to Improve Frequency Stability Due to Penetration of Renewable Energy Generators.
Rapid industrial development requires more amount of energy in supporting all their industrial processes. The use of conventional energy has not been friendly with nature due to it can damage the environment circumstance. The transformation from the use of conventional energy to the use of a renewable energy source is increasingly being socialized throughout the world. However, the existence of renewable energy poses new challenges in the world of electricity systems. In the future, renewable energy plants will be integrated with existing electrical systems. But, renewable energy generation provides great effects in decreasing the inertia value (inertialess) of the electrical power system which causes frequency oscillation and towards the frequency instability state. To overcome this problem, virtual inertia control (VIC) based on energy storage systems is utilized to accommodate the integration effect of renewable energy into the electrical power system. One of the energy storage systems used is superconducting magnetic energy storage (SMES). SMES is an energy storage system that has a fast response and an efficiency level of up to 90%. The two-area power system model is utilized where it consists of automatic generation control (AGC) on each area, loads, thermal power plants, and wind power plants in area one. From the simulation results, the VIC based on SMES is successfully reducing the frequency oscillation by compressing the overshoot of the system and decreasing the settling time towards the steady-state. For future research, an artificial intelligence approach can be utilized to coordinate the AGC and VIC controllers for providing more frequency oscillation damping.
Universitas Pertamina - vii
KATA PENGANTAR
Assalamualaikum Wr.Wb.
Dengan memanjatkan puji syukur kehadirat Allah SWT atas Rahmat dan Hidayah-Nya sehingga Laporan Tugas Akhir dengan judul VIRTUAL INERTIA CONTROL (VIC)
BERBASIS SUPERCONDUCTING MAGNETIC ENERGY STORAGE (SMES) UNTUK MEMPERBAIKI KESTABILAN FREKUENSI DIAKIBATKAN PENETRASI PEMBANGKIT ENERGI BAU TERBARUKAN (PEBT) akhirnya dapat penulis susun dan selesaikan. Penulisan laporan Tugas Akhir ini dimaksudkan sebagai syarat menyelesaikan program sarjana di Program Studi S1 Teknik Elektro, Fakultas Teknologi Industri, Universitas Pertamina.
Laporan Tugas Akhir ini dapat diselesaikan berkat bantuan dan dukungan dari berbagai pihak yang telah memberikan gagasan, bimbingan dan berbagai upaya lainnya. Pada kesempatan ini penulis mengucapkan terima kasih kepada:
1. Kedua Orang Tua: Andi Sunario, S.H & Gumiathy yang telah memberikan segala dukungan.
2. Bapak Dr. Eng. Muhammad Abdillah, S.T., M.T., selaku Dosen Teknik Elektro dan Dosen Pembimbing yang telah membimbing penyelesaian Tugas Akhir. 3. Bapak Teguh Aryo Nugroho, S.T., M.T., selaku Dosen Wali dan Dosen
Pembimbing yang telah membimbing dalam penyelesaian Tugas Akhir. 4. Bapak Prof. Akhmaloka Ph.D sebagai Rektor Universitas Pertamina.
5. Bapak Prof. Dr. Ir. Ichsan Setya Putra sebagai Wakil Rektor I Bidang Akademik dan Kemahasiswaan Universitas Pertamina.
6. Bapak Prof. Ir. Suprihanto, Ph.D sebagai Dekan Fakultas Perencanaan Infrastruktur & Fakultas Teknologi Industri Universitas Pertamina.
7. Bapak Dr. Eng. Wahyu Kunto Wibowo, M.T., Ketua Program Studi Teknik Elektro, Universitas Pertamina.
8. Seluruh dosen Program Studi Teknik Elektro Universitas Pertamina.
9. Seluruh staff akademik dan administrasi Program Studi Teknik Elektro yang telah membantu penulis dalam pelaksanaan kegiatan Tugas Akhir ini.
10. Teman – Teman KBC, yang selalu menghibur penulis dikala senang maupun sedih, meliputi Sulaiman, Tian, Yudho, Sulton, Aul, Amien, Bobby, Jonathan, William, Rinaldi, dan Panji.
Jakarta, 3 Agustus 2020 Penulis,
Universitas Pertamina - ix
DAFTAR ISI
LEMBAR PENGESAHAN ... i
LEMBAR PERNYATAAN ... iii
ABSTRAK ... v
ABSTRACT ... vi
KATA PENGANTAR ... vii
DAFTAR ISI... ix
DAFTAR TABEL ... xi
DAFTAR GAMBAR ... xii
BAB I PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Rumusan Masalah ... 2 1.3 Batasan Masalah ... 2 1.4 Tujuan Perancangan ... 3 1.5 Manfaat Perancangan ... 3
1.6 Waktu Pelaksanaan Perancangan ... 4
BAB II TINJAUAN PUSTAKA... 7
2.1 Dasar Sistem Kontrol ... 7
2.1.1 Jenis-Jenis Sistem Kontrol ... 9
2.2 Automatic Generation Control ... 10
2.2.1 Dasar-Dasar Automatic Generation Control ... 10
2.2.2 Automatic Generation Control PadaSistem Tenaga Listrik ... 10
2.2.3 Automatic Generation Control Pada Single Area ... 11
2.2.4 Automatic Generation Control Terinterkoneksi Power System ... 12
2.2.5 Frequency Bias Tie-Line Control... 15
2.2.6 Automatic Generation Control Multi Area ... 16
2.3 Persamaan Ayunan ... 17
2.4 Model Pengendalian Daya Aktif dan Frekuensi ... 19
2.4.1 Pemodelan Generator ... 19
2.4.2 Pemodelan Beban ... 19
Universitas Pertamina - x
2.5 Pembangkit Energi Baru Terbarukan ... 21
2.6 Virtual Inertia Control Berbasis SMES ... 22
BAB III KONSEP PERANCANGAN ... 27
3.1 Diagram Alir Perancangan ... 27
3.2 Pertimbangan Perancangan ... 28
3.3 Analisis Teknis ... 28
3.3.1 Kontrol Frekuensi Pada Microgrid... 29
3.3.2 Indeks Performansi Eror ... 30
3.4 Peralatan dan Bahan ... 31
BAB IV HASIL DAN PEMBAHASAN ... 33
4.1 Pendahuluan ... 35
4.2 Data Parameter Sistem ... 37
4.3 Pengontrol Sistem AGC ... 38
4.4 Penetrasi Pembangkit Energi Baru Terbarukan ... 39
4.1 Analisis dan Simulasi ... 41
4.5.1 Studi Kasus 1 ... 41
4.5.2 Studi Kasus 2 ... 45
BAB V KESIMPULAN DAN SARAN ... 59
5.1 Kesimpulan ... 59
5.2 Saran ... 59
Universitas Pertamina - xi
DAFTAR TABEL
Tabel 1.1 Pelaksanaan Perancangan TA ... 3
Tabel 3.2 Peralatan dan Bahan dalam Perancangan TA ... 31
Tabel 4.1 Data Parameter Sistem ... 37
Tabel 4.2 Data Parameter Sistem AGC Menggunakan Pengontrol ... 38
Tabel 4.3 Parameter Studi Kasus Dua ... 38
Tabel 4.4 Respon Pengontrol PID Terhadap Perubahan Konstanta ... 39
Tabel 4.5 Data Parameter Pembangkit Listrik Tenaga Bayu ... 40
Tabel 4.6 Spesifikasi Performansi Pada Studi Kasus 1 Tanpa Pengontrol ... 43
Tabel 4.7 Spesifikasi Performansi Studi Kasus Satu Menggunakan Pengontrol ... 45
Tabel 4.8 Keadaan Operasi AGC Karena Adanya Pembangkit Listrik Tenaga Bayu ... 45
Tabel 4.9 Spesifikasi Performansi Studi Kasus Dua Skenario Satu ... 49
Tabel 4.10 Spesifikasi Performansi Studi Kasus Dua Skenario Dua ... 52
Tabel 4.11 Spesifikasi Performansi Studi Kasus Dua Skenario Tiga ... 55
Universitas Pertamina - xii
DAFTAR GAMBAR
Gambar 2.1 Diagram Sistem Kontrol Sederhana ... 8
Gambar 2.2 Sistem Kontrol Kompleks ... 9
Gambar 2.3 Sistem Kontrol Open Loop ... 9
Gambar 2.4 Sistem Kontrol Close Loop ... 9
Gambar 2.5 Kontrol Integral AGC Ditambahkan pada Unit Pembangkit yang Dipilih.... 11
Gambar 2.6 AGC Power System Single Area ... 11
Gambar 2.7 Power System 2 Area ... 12
Gambar 2.8 Electrical Equivalent ... 12
Gambar 2.9 Blok Diagram AGC Terinterkoneksi Power System ... 13
Gambar 2.10 Pengaruh Perubahan Beban pada Area 1 ... 14
Gambar 2.11 Blok Diagram Sistem Dua Area Dengan AGC ... 16
Gambar 2.12 Blok Diagram Pemodelan Generator ... 19
Gambar 2.13 Blok Diagram Pemodelan Generator dan Beban ... 20
Gambar 2.14 Blok Diagram Pemodelan Penggerak Turbin ... 20
Gambar 2.15 Blok Diagram Pemodelan Governor ... 21
Gambar 2.16 Diagram Virtual Inersia ... 22
Gambar 2.17 Skema Sistem Penyimpanan Energi SMES ... 23
Gambar 2.18 Blok Diagram SMES ... 24
Gambar 3.1 Diagram Perancangan VIC Berbasis SMES ... 27
Gambar 3.2 Pemodelan VIC Menggunakan SMES ... 29
Gambar 4.1 Pengaplikasian Ki Pada Sistem LFC Area ke-i... 35
Gambar 4.2 Pengaplikasian Pengontrol PI pada Sistem AGC Area ke-i ... 36
Gambar 4.3 Model Dinamik dari VIC dan SPE Konvensional ... 36
Gambar 4.4 Model Dinamik VIC dan SMES... 37
Gambar 4.5 Profil Daya PLTB Area Satu Dalam Satuan p.u ... 40
Gambar 4.6 Pemodelan Sistem Primary Load Frequency Control ... 42
Gambar 4.7 Deviasi Frekuensi Pada Area Satu ... 43
Gambar 4.8 Deviasi Frekuensi Pada Area Dua ... 43
Gambar 4.9 Deviasi Frekuensi Area Satu ... 44
Gambar 4.10 Deviasi Frekuensi Area Dua ... 44
Gambar 4.11 Respon Frekuensi Area Satu dan Dua Pengontrol I ... 46
Gambar 4.12 Respon Frekuensi Area Satu dan Dua Pengontrol PI ... 47
Universitas Pertamina - xiii
Gambar 4.14 Respon Frekuensi Area Satu dan Dua Pengontrol PI – VIC SMES ... 48
Gambar 4.15 Respon Frekuensi Seluruh Pengontrol Area Satu ... 48
Gambar 4.16 Respon Frekuensi Area Satu dan Dua Pengontrol I ... 50
Gambar 4.17 Respon Frekuensi Area Satu dan Dua Pengontrol PI ... 50
Gambar 4.18 Respon Frekuensi Area Satu dan Dua Pengontrol PI-VIC ... 51
Gambar 4.19 Respon Frekuensi Area Satu dan Dua Pengontrol PI-VIC SMES ... 51
Gambar 4.20 Respon Frekuensi Seluruh Pengontrol Area Satu ... 52
Gambar 4.21 Respon Frekuensi Area Satu dan Dua Pengontrol I ... 53
Gambar 4.22 Respon Frekuensi Area Satu dan Dua Pengontrol PI ... 53
Gambar 4.23 Respon Frekuensi Area Satu dan Dua Pengontrol PI – VIC ... 54
Gambar 4.24 Respon Frekuensi Area Satu dan Dua Pengontrol PI – VIC SMES ... 54
Universitas Pertamina - 1
BAB I PENDAHULUAN
1.1
Latar Belakang
Kebutuhan energi dunia saat ini masih menitikberatkan pada penggunaan energi fosil. Energi fosil merupakan sumber energi konvensional yang penggunaannya terbatas dan tidak ramah lingkungan. Bentuk sumber energi fosil ini berupa minyak, gas, dan batubara. Di Indonesia, pembangkit listrik masih didominasi oleh pembangkit yang menggunakan sumber energi konvensional, seperti pembangkit listrik tenaga uap (PLTU) yang menggunakan batubara sebagai bahan bakar utama dari PLTU [1]. Namun, keberadaan sumber energi konvensional tidak menjadi solusi sebagai pemenuhan kebutuhan energi dunia. Sumber energi konvensional secara terus-menerus akan mengakibatkan terjadinya peningkatan emisi gas rumah kaca (GRK) dan menimbulkan masalah lingkungan yang dapat mengganggu keberlangsungan ekosistem [2].
Berdasarkan permasalahan lingkungan yang dapat berdampak pada kelangsungan hidup, diperlukan adanya inovasi pada bidang energi. Inovasi pada bidang energi dapat dilaksanakan dengan memanfaatkan pembangkit energi baru terbarukan (PEBT). Pemerintah Indonesia melalui Kementerian Energi dan Sumber Daya Mineral (KESDM) memberikan perhatian lebih pada pemanfaatan sumber energi baru terbarukan (EBT). Adapun target pemerintah hingga tahun 2025, diharapkan penggunaan EBT dapat direalisasikan sebesar 23% dari total kebutuhan energi Indonesia [3]. Peralihan energi fossil menuju EBT harus dilakukan secara bertahap, dikarenakan perlunya modal, pengembangan teknologi, dan sumber daya manusia agar EBT dapat diterapkan secara maksimal. Penggunaan EBT dalam skala besar akan memunculkan permasalahan baru seperti, kestabilan frekuensi pada sistem kelistrikan karena terjadinya pengurangan nilai inersia (inertialess) yang disebabkan oleh PEBT.
Penggunaan sistem jaring kelistrikan berskala kecil disebut microgrid yang memiliki fungsi sebagai pengatur dan pengontrol frekuensi pada sistem jaring kelistrikan. Sistem interkoneksi akan menghubungkan berbagai pembangkit secara sinkron. Pembangkit dapat dikatakan sinkron jika memiliki frekuensi yang sama. Penentuan besarnya daya antar pembangkit harus mempertimbangkan perkiraan mengenai besaran daya yang akan ditanggung oleh sistem. Setiap waktu permintaan daya akan berubah sesuai dengan kebutuhan. Perubahan daya tersebut harus dapat dipenuhi oleh sistem untuk dapat merespon dengan kata lain meningkatkan keluaran daya secara cepat dari nol hingga beban penuh. Kecepatan governor pada unit pembangkit akan mempengaruhi kecepatan pokok sebagai fungsi kontrol yang diperlukan dalam sistem kelistrikan, sehingga frekuensi bukan besaran konstan. Frekuensi akan berubah sesuai perubahan beban yang terjadi. Maka dari itu, dibuatlah suatu sistem yang dapat mengatur frekuensi pada sistem tenaga yang dikenal sebagai
automatic generation control (AGC).
Sistem kelistrikan memiliki nilai inersia yang mampu melakukan sinkronisasi dari setiap pembangkit. Sehingga ketika adanya interkoneksi dari PEBT ke dalam sistem AGC akan menimbulkan masalah yang berdampak pada perubahan nilai inersia. Inertialess akan mempengaruhi ketidakseimbangan daya dan terjadi perubahan frekuensi yang akan mengakibatkan osilasi pada sistem. Penurunan kehandalan dan kestabilan sistem akan terjadi sehingga sistem mengalami gangguan atau ketidakstabilan. Sistem yang baik mampu mempertahankan kestabilan ketika terjadi gangguan. Berdasarkan sifat gangguan dikategorikan dalam dua jenis, yaitu gangguan yang bersifat
Universitas Pertamina - 2
transien (seperti, putus jaring, hubung singkat, dll) dan gangguan bersifat dinamik (seperti, terjadinya perubahan beban yang tidak besar). Gangguan akan berdampak pada kestabilan frekuensi. Maka dari itu, perlu adanya teknik kontrol yang mampu mempertahankan kestabilan frekuensi ketika terjadinya interkoneksi PEBT pada sistem kelistrikan yang telah ada [4].
Nilai sistem inersia dapat diatur menggunakan konsep teknik virtual inertia control (VIC). VIC merupakan teknik kontrol yang memanfaatkan sistem penyimpanan energi berbasis inverter. VIC mampu meningkatkan nilai inersia sistem dan mampu menjaga kestabilan frekuensi. Sistem VIC didesain menghubungkan sistem penyimpanan energi dengan jaringan AGC. Sistem dapat bekerja secara efisien memenuhi kebutuhan daya yang terkoneksi dalam sistem jaring. Namun, sistem VIC memiliki nilai yang konstan, sehingga ketika terjadi penetrasi PEBT akan mengakibatkan ketidakstabilan sistem.
Pemilihan sistem penyimpanan energi harus disesuaikan dengan kebutuhan dan kehandalan yang dibutuhkan dengan sistem jaring. Berbagai jenis sistem penyimpanan energi pada umumnya seperti, superconducting magnetic energy storage (SMES), capacitor energy storage (CES), dan
battery energy storage system (BESS), dan lain-lain. Perancangan menggunakan SMES karena memliki efisiensi dan respon yang cepat serta mampu diaplikasikan pada sistem tenaga listrik. Selain itu, SMES dapat meningkatkan kestabilan frekuensi sehingga mampu menjaga keandalan sistem tenaga listrik secara keseluruhan [5]. SMES memiliki aliran arus yang bersirkulasi secara terus-menerus dalam lilitan superkonduktor untuk menghasilkan medan magnet sebagai tempat penyimpanan energi. Di dalam proses konversi energi sistem SMES hanya mengubah alternating current (AC) menjadi direct current (DC), maka tidak ada rugi-rugi termodinamika yang melekat terkait dengan konversi satu bentuk energi ke bentuk lainnya [6]. Maka dari itu, perancangan akan menggunakan SMES sebagai VIC ketika adanya penetrasi dari PEBT.
1.2
Rumusan Masalah
Adapun rumusan masalah pada perencanaan perancangan tugas akhir (TA) adalah sebagai berikut.
1. Desain automatic generation control dua area yang terintegrasi dengan virtual inertia control dan pembangkit energi baru terbarukan.
2. Performansi desain sistem pemodelan automatic generation control dua area menggunakan
virtual inertia control berbasis superconducting magnetic energy storage untuk meredam terjadinya osilasi frekuensi yang disebabkan oleh beban statis dan penetrasi pembangkit energi baru terbarukan.
1.3
Batasan Masalah
Perancangan TA memiliki batasan masalah agar pembahasan lebih terfokus pada bidang yang diteliti yaitu, virtual inertia control (VIC)menggunakan superconducting magnetic energy storage
(SMES) untuk memperbaiki kestabilan frekuensi karena penetrasi pembangkit energi baru terbarukan (PEBT). Adapun batasan masalah perancangan TA adalah sebagai berikut.
1. Pemodelan sistem menggunakan dua area automatic generation control yang saling terhubung.
2. Beban, virtual inertia control, dan pembangkit energi baru terbarukan yang saling terintegrasi pada area satu automatic generation control.
3. Pembangkit energi baru terbarukan yang digunakan adalah pembangkit listrik tenaga bayu. 4. Beban bersifat statis.
Universitas Pertamina - 3
1.4
Tujuan Perancangan
Tujuan umum yang ingin dicapai dari pengerjaan TA adalah menerapkan pengetahuan yang telah diperoleh ketika perkuliahan agar mampu diaplikasikan pada permasalahan nyata. Adapun tujuan khusus dari perancangan TA adalah sebagai berikut.
1. Mendesain virtual inertia control berbasis superconducting magnetic energy storage untuk memperbaiki respon frekuensi pada pembangkit dua area yang saling terkoneksi dengan
automatic generation control dan penetrasi dari pembangkit energi baru terbarukan.
2. Mengevaluasi performa virtual inertia control berbasis superconducting magnetic energy storage menggunakan indeks performansi integral time absolute error (ITAE).
1.5
Manfaat Perancangan
Berikut merupakan beberapa manfaat perancangan VICberbasis SMES adalah sebagai berikut. 1. Memberikan informasi mengenai dampak penetrasi pembangkit energi baru terbarukan
dalam sistem tenaga listrik beserta solusinya.
2. Dapat dijadikan sebagai referensi ketika pemodelan sistem diimplementasikan pada permasalahan nyata.
Universitas Pertamina - 4
1.6
Waktu Pelaksanaan Perancangan
Adapun gantt chart digunakan sebagai panduan untuk menyelesaikan TA dapat dilihat pada Tabel 2.2 dibawah ini.
Tabel 1.1 Pelaksanaan Perancangan TA
No. Kegiatan
Bulan Januari Februari Maret April Mei Juni Juli Agustus
Minggu
ke- 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 2 3 1. Pengajuan Dosen Pembimbing TA
2. Pencarian Studi Literatur Acuan
TA
3. Pembuatan Proposal TA 4. Pendaftaran TA
5. Bimbingan
6. Peninjauan Kelajuan TA (I) 7. Seminar Laporan Kemajuan TA 8. Peninjauan Kelajuan TA (II) 9. Batas Akhir Pendaftaran Sidang
TA
10. Pekan Sidang TA 11. Pengumuman Nilai Sidang TA 12. Seminar Hasil TA 13. Pengecekan Data Kelulusan Prodi 14. Yudisium Universitas U ni ver si tas Per ta m ina - 3
Universitas Pertamina - 7
BAB II TINJAUAN PUSTAKA
Perancangan Tugas Akhir (TA) merupakan pengembangan dari penelitian yang telah dilaksanakan sebelumnya, yaitu mengenai analisis stabilitas automatic generation control (AGC). Referensi yang dipilih sebagai acuan dari perancangan TA merupakan penelitian yang membahas analisis stabilitas frekuensi. Berikut uraian singkat referensi penelitian yang dijadikan acuan dalam pengerjaan perancangan TA.
Penelitian yang dilakukan oleh Thongchart Kerdhphol, dkk pada tahun 2019, penelitian yang berjudul “Self-Adaptive Virtual Inertia Control-Based Fuzzy Logic to Improve Frequency Stability of Microgrid With High Renewable Penetration”. Penelitian membahas tentang load frequency control (LFC) digunakan selama bertahun-tahun sebagai bagian automatic generation control (AGC) dalam power system seluruh dunia. Dalam mixed power system, biasanya ditentukan untuk pembangkit energi baru terbarukan (PEBT), seperti pembangkit listrik tenaga surya (PLTS) dan pembangkit listrik tenaga bayu (PLTB) di satu area dengan generator termal atau kombinasi antara generator termal dengan PEBT. Dalam analisisnya, diteliti kinerja AGC ketika adanya penetrasi PEBT pada sistem jaring tenaga listrik (microgrid) yang menggunakan virtual inertia control (VIC) berbasis energy storage system (ESS). Sistem kontrol menggunakan fuzzy logic controller (FLC). Analisis kinerja sistem jaring area yang saling terhubung dengan simulasi dan studi perangkat lunak
Simulink Matlab.
Perancangan desain TA membahas tentang stabilitas sistem tenaga listrik dengan automatic
generation control (AGC) menggunakan virtual inertia control (VIC) menggunakan
superconducting magnetic energy storage (SMES). Dalam pengendalian sistem AGC, ada banyak gangguan yang terjadi sehingga perlu dilakukan studi kestabilan dinamik di sekitar titik operasi dan melakukan percobaan analisa perilaku kestabilan frekuensi pada sistem AGC menggunakan VIC berbasis SMES. Perancangan akan dilakukan dalam bentuk simulasi. Dalam penelitian analisa stabilitas sistem tenaga listrik dengan AGC menggunakan VIC berbasis SMES akan ditentukan suatu ukuran untuk menentukan stabilitas frekuensi dengan beberapa kendala tertentu yang akan meminimumkan suatu ukuran simpangan dan perilaku ideal dari governor. Ukuran ini biasanya ditetapkan berdasarkan kriteria indeks performansi. Indeks performansi didefinisikan sebagai suatu fungsi yang harganya menunjukkan seberapa baik performansi sesitem yang sebenarnya mendekati performansi yang diinginkan. Indeks performansi penting untuk menentukan sifat kendali optimal frekuensi tenaga listrik yang diperoleh. Jadi kendali yang diperoleh bisa jadi linier, nonlinier,
stasioner atau berubah terhadap waktu tergantung pada bentuk indeks performnasinya. Parameter data yang digunakan perancangan TA mengacu pada paperSelf-Adaptive Virtual Inertia Control-Based Fuzzy Logic to Improve Frequency Stability of Microgrid With High Renewable Penetration
oleh Thongchart Kerdhphol pada tahun 2019.
2.1
Dasar Sistem Kontrol
Sistem kontrol merupakan suatu sistem yang terdiri dari beberapa elemen sistem yang bertujuan untuk melakukan pengaturan atau pengendalian suatu proses agar mendapatkan suatu besaran yang diinginkan. Sistem kontrol terdiri dari komponen-komponen fisik dan non-fisik yang disusun sedemikian rupa hingga mampu berfungsi sesuai dengan tujuan. Sistem kontrol berkaitan dengan proses pengaturan atau pengendalian terhadap satu atau lebih besaran (variabel dan parameter) sehingga berada pada suatu nilai pada range tertentu sesuai dengan yang diharapakan (set point).
Universitas Pertamina - 8
Sistem pengendalian atau teknik pengaturan dapat didefinisikan sebagai suatu usaha atau perlakuan terhadap suatu sistem dengan masukan tertentu guna mendapatkan keluaran sesuai dengan yang dibutuhkan. Sistem pengaturan berkaitan dengan hubungan timbal-balik antara komponen-komponen yang membentuk suatu konfigurasi sistem agar memberikan suatu hasil respon tertentu [7].
Pengaplikasian suatu sistem kontrol memiliki tujuan atau sasaran tertentu. Sasaran sistem kontrol adalah mengatur keluaran (output) dalam kondisi atau keadaan yang telah ditetapkan oleh masukan (input) melalui elemen sistem kontrol. Diagram sistem kontrol dapat dilihat pada Gambar 2.1 berikut.
Gambar 2.1 Diagram Sistem Kontrol Sederhana [7]
Pada Gambar 2.1 menerangkan kualitas dari suatu output yang dihasilkan tergantung dari proses yang dilakukan oleh sistem kontrol. Berikut ini merupakan pengertian dari beberapa istilah yang akan digunakan pada perancangan TA.
1. System adalah kombinasi dari komponen-komponen yang saling berkontribusi membentuk
suatu objek tertentu.
2. Controlled variable adalah suatu besaran (quantity) atau kondisi (condition) yang terukur dan terkontrol. Pada keadaan normal merupakan output dari sistem.
3. Manipulated variable adalah suatu besaran atau kondisi yang bervariasi pada kontroler sehingga mempengaruhi nilai dari variabel terkontrol.
4. Control adalah mengatur, mengukur nilai dari variabel terkontrol dari sistem dan mengaplikasikan manipulated variabel pada sistem untuk mengoreksi atau mengurangi deviasi yang terjadi terhadap nilai output yang diinginkan.
5. Plant adalah suatu objek fisik yang dikontrol.
6. Process adalah suatu operasi yang sedang dikontrol atau tahapan-tahapan untuk mendapatkan output yang diinginkan.
7. Disturbance adalah sebuah gangguan dalam bentuk sinyal yang memengaruhi nilai output. 8. Feedback control adalah operasi untuk mengurangi perbedaan antara output sistem dengan
referensi input.
9. Controller adalah suatu alat atau cara untuk memodifikasi karakteristik sistem dinamik (dynamic system) yang dihasilkan sesuai dengan kebutuhan.
10. Sensor adalah peralatan yang digunakan untuk mengukur output sistem dan menyetarakan dengan sinyal input sehingga mampu dilakukan suatu operasi hitung antara output dan input. 11. Control action adalah besaran atau nilai yang dihasilkan oleh perhitungan controller untuk
diberikan pada plant dengan asumsi kondisi normal merupakan manipulated variable. 12. Actuator adalah suatu peralatan atau kumpulan komponen yang menggerakkan plant.
Istilah-istilah diatas dapat dibentuk menjadi suatu sistem kontrol yang dapat dilihat pada Gambar 2.2 berikut ini.
Sistem Kontrol
Universitas Pertamina - 9 controller input output actuator plant sensor Controlled variable Manipulated variable disturbance feedback
Gambar 2.2 Sistem Kontrol Kompleks [7]
2.1.1
Jenis-Jenis Sistem Kontrol
Sistem kontrol terdiri dari dua jenis sistem, yaitu open loop dan close loop.
2.1.1.1
Sistem Kontrol Open Loop
Sistem kontrol open loop adalah sistem kontrol yang output-nya tidak mempengaruhi proses pengontrolan. Sistem kontrol open loop, output tidak diukur atau diberikan umpan-balik untuk dibandingkan dengan input. Pada Gambar 2.3 menunjukkan hubungan masukan output untuk sistem kontrol open loop. Pada setiap sistem kontrol open loop, output tidak dibandingkan dengan input, sehingga setiap input terdapat suatu kondisi yang tetap.
Gambar 2.3 Sistem Kontrol Open Loop [7]
Sistem kontrol open loop memiliki kekurangan, ketika ada gangguan sistem tidak dapat bekerja seperti yang diharapkan. Open loop control dapat digunakan dalam praktek yang hanya memiliki hubungan antara input dan output serta tidak terdapat gangguan internal maupun eksternal [7].
2.1.1.2
Sistem Kontrol Close Loop
Sistem kontrol close loop adalah sistem kontrol yang sinyal output-nya memiliki pengaruh langsung pada proses pengontrolan. Sistem kontrol close loop merupakan sistem kontrol yang memiliki feedback berupa sinyal output atau fungsi sinyal output dan turunannya. Feedback diputar kembali pada controller untuk memperkecil eror dan membuat output sistem mendekati nilai yang diinginkan. Dengan kata lain, istilah close loop berarti menggunakan aksi feedback untuk memperkecil kesalahan atau eror pada sistem kontrol. Sistem kontrol close loop dapat dilihat seperti pada Gambar 2.4 berikut ini.
Pembanding
input output
Pengendali Proses
sensor
Feedback
Gambar 2.4 Sistem Kontrol Close Loop [7]
controller proses
Universitas Pertamina - 10
2.2
Automatic Generation Control
Automatic generation control (AGC) pada sistem tenaga listrik merupakan suatu sistem penyesuaian output daya dari beberapa pembangkit dengan sumber yang berbeda-beda ketika merespon suatu perubahan beban. Jika terjadi peningkatan beban pada sistem, maka kecepatan turbin akan berkurang sebelum sistem dapat menyesuaikan input dengan beban yang baru. Seiring berjalannya waktu kecepatan atau frekuensi perlahan berkurang, sinyal eror yang terjadi akan semakin berkurang dan posisi controller kembali mendekati titik yang ditentukan untuk dapat mempertahankan kecepatan atau frekuensi yang konstan. Nilai frekuensi dapat dikembalikan ke titik nominalnya dengan menambahkan integrator. Integrator mampu mengontrol eror rata-rata selama selang waktu tertentu yang akan memperbaiki offset. Sehingga, ketika sistem mengalami perubahan beban setiap saat, generator mampu dikontrol otomatis untuk mengubah frekuensi ke nilai optimalnya [8].
2.2.1
Dasar-Dasar Automatic Generation Control
Penggunaan respon kontrol kecepatan primer, perubahan beban sistem akan menghasilkan deviasi frekuensi steady-state, tergantung pada karakteristrik droop governor dan sensitivitas frekuensi pada beban. Semua unit pembangkit dalam mengatur kecepatan akan berkontribusi terhadap keseluruhan perubahan yang terjadi pada generator yang terlepas dari lokasi perubahan beban. Pengembalian frekuensi sistem terhadap nilai nominal memerlukan perintah kontrol tambahan yang mengatur set-point referensi beban unit pembangkit yang dipilih. Karena sistem beban terus berubah, maka diperlukan perubahan output generator secara otomatis. AGC bertujuan untuk mengatur frekuensi dengan nilai nominal yang ditentukan dan mempertahankan interchange power antara area kontrol pada nilai yang konstan dengan menyesuaikan output dari generator yang dipilih. Selain itu, AGC juga bertujuan untuk mendistribusikan perubahan unit generator yang dibutuhkan agar mampu mengefisiensikan biaya operasional.
2.2.2
Automatic Generation Control Pada Sistem Tenaga Listrik
Pemeliharaan interchange power pada sistem tenaga listrik tidak menjadi masalah dikarenakan fungsi AGC telah mengembalikan frekuensi ke nilai nominal yang ditentukan. Penambahan kontrol
reset atau integral yang bekerja pada pengaturan referensi beban dari unit governor diperlukan pada proses mengembalikan frekuensi ke nilai optimal. Tindakan kontrol integral dapat memastikan zero frequency error dalam keadaan steady state. Penambahan cara kerja generation control lebih lama dari pada cara kerja speed control primer. AGC mampu menyesuaikan pengaturan referensi beban dari unit yang dipilih. Daya output dapat memindahkan efek dari karakteristik pengaturan frekuensi komposit dari sistem tenaga yang dimulai setelah primary speed control bekerja pada semua unit kemudian distabilkan oleh sistem frekuensi. Gambar 2.5 memperlihatkan bagaimana proses AGC ketika ditambahkan integral.
Universitas Pertamina - 11 Governor Turbine Rotational Inertia and Damping + _
Load Ref Governor Turbine
+ _ Units on primary Supplementary control + _ + _ Rotational Inertia and Damping T + _
Gambar 2.5 Kontrol Integral AGC Ditambahkan pada Unit Pembangkit yang Dipilih
2.2.3
Automatic Generation Control Pada Single Area
Dengan load frequency control (LFC) sebagai sistem loop primer akan terjadi deviasi pada keadaan steady state yang disebabkan oleh perubahan beban pada sistem. Pengurangan nilai deviasi frekuensi dilakukan hingga nol dengan menggunakan fungsi reset. Reset dapat dicapai dengan menggunakan sebuah controller integral sebagai pengatur beban referensi untuk mengubah set point
kecepatan. Controller integral mampu menambah jenis sistem untuk mengubah nilai frekuensi akhir menjadi 𝛥𝑓 = 0. Gambar 2.6 memperlihatkan AGC dalam power system single area.
B
AGC
bias
ACE
Controller Governor Turbine Inertia
+ _
+ _
Gambar 2.6 AGC Power System Single Area [8] Keterangan : B = frequency bias factor
KI = integral controller
ACE = area control error
Pada Gambar 2.6 mendeskripsikan proses yang terjadi dari AGC sebagai kontrol pada single area. Setiap kontrol area sistem yang terinterkoneksi dikendalikan dengan cara yang sama, namun terlepas dari area kontrol yang lain dengan artian kontrol pembangkit dalam sistem saling berhubungan atau biasa disebut area wise decentralized.
Universitas Pertamina - 12
2.2.4
Automatic Generation Control Terinterkoneksi Power System
Pembentukan dasar sistem kontrol tambahan dengan power system interkoneksi harus memperhatikan kinerja kontrol dengan speed control utama. Perhatikan sistem interkoneksi pada Gambar 2.7 yang terdiri dari dua area yang dihubungkan oleh tie-line reaktansi Xtie. Studi load
frequency pada masing-masing area dapat diwakilkan oleh unit pembangkit yang sama secara keseluruhan. Pada Gambar 2.8 menunjukkan ekuivalen dari sistem listrik dengan masing-masing area memiliki sumber tegangan di balik reaktansi setara seperti yang terlihat pada tie-linebus. Aliran daya pada tie-line area 1 ke area 2 dapat dilihat pada persamaan 2.1.
𝑃12=
𝐸1𝐸2
𝑋𝑇
𝑠𝑖𝑛(𝛿1−𝛿2) (2.1)
Linearizing mengenai titik nominal awal ditunjukkan oleh 𝛿1 = 𝛿10 dan 𝛿2= 𝛿20, maka didapat persamaan 2.2.
𝛥𝑃12= 𝑇𝛥𝛿12 (2.2)
Kemudian, 𝛥𝛿12 = 𝛥𝛿1− 𝛥𝛿2 dan T adalah koefisien torsi sinkron. Maka didapat persamaan 2.3.
𝑇 =𝐸1𝐸2 𝑋𝑇
𝑐𝑜𝑠(𝛿10−𝛿20) (2.3)
Gambar 2.7 Power System 2 Area
P12
Xtie X2
X1
Gambar 2.8Electrical Equivalent
Area 1 Area 2
P12
Universitas Pertamina - 13 Turbine Governor T Turbine Governor
Load ref 1 Load ref 2
AREA 1 AREA 2
Gambar 2.9 Blok Diagram AGC Terinterkoneksi Power System [9]
Pada Gambar 2.9 blok diagram sistem dengan masing-masing area terdapat equivalent inertia M, load-dampingconstant D, turbine, dan governor system dengan effective speed droop R. Tie-line
merupakan representasi dari synchronizing torquecoefficient T. Nilai positif dari 𝛥𝑃12 adalah hasil peningkatan transfer daya dari area 1 ke area 2, sehingga terjadi peningkatan beban di area 1 dan penurunan beban di area 2. Feedback dari 𝛥𝑃12 bertanda negatif di area 1 dan terbalik pada di area 2 yang bertanda positif. Deviasi frekuensi steady-state ( f – f0 ) berlaku sama untuk kedua area.
Sehingga, total perubahan beban 𝛥𝑃𝐿 dapat dilihat pada persamaan 2.4.
𝛥𝑓= 𝛥𝜔1= 𝛥𝜔2= −𝛥𝑃𝐿 (𝑅1 1+ 1 𝑅2) + (𝐷1+ 𝐷2) (2.4)
Nilai steady-state perlu dipertimbangkan setelah kenaikan beban pada area 1 oleh 𝛥𝑃𝐿1, maka didapat persamaan 2.5 pada area 1 dan persamaan 2.6 pada area 2.
𝛥𝑃𝑚1− 𝛥𝑃12− 𝛥𝑃𝐿1= 𝛥𝑓𝐷1 (2.5)
𝛥𝑃𝑚2+ 𝛥𝑃12 = 𝛥𝑓𝐷2 (2.6)
Terjadi perubahan tenaga mekanik, maka didapat persamaan 2.7 dan 2.8.
𝛥𝑃𝑚1= −
𝛥𝑓
Universitas Pertamina - 14
𝛥𝑃𝑚2 = −
𝛥𝑓
𝑅2 (2.8)
Persamaan 2.5 disubstitusi dengan persamaan 2.7, maka didapat persamaan 2.9.
𝛥𝑓(1 𝑅1
+ 𝐷1) = −𝛥𝑃12− 𝛥𝑃𝐿1 (2.9)
Kemudian, persamaan 2.6 disubstitusi dengan persamaan 2.8, maka didapat persamaan 2.10.
𝛥𝑓(1 𝑅2
+ 𝐷2) = 𝛥𝑃12 (2.10)
Dari persamaan 2.9 dan 2.10, maka didapat persamaan 2.11 dan 2.12.
𝛥𝑓 = −𝛥𝑃𝐿1 (𝑅1 1+ 𝐷1) + ( 1 𝑅2+ 𝐷2) = −𝛥𝑃𝐿1 𝛽1+ 𝛽2 (2.11) 𝛥𝑃12= −𝛥𝑃𝐿1(𝑅1 2+ 𝐷2) (𝑅1 1+ 𝐷1) + ( 1 𝑅2+ 𝐷2) =−𝛥𝑃𝐿1𝛽2 𝛽1+ 𝛽2 (2.12)
Diketahui 𝛽1dan 𝛽2 merupakan karakteristik dari respon frekuensi pada area 1 dan 2. Persamaan diatas dapat dijelaskan melalui Gambar 2.10.
Gambar 2.10 Pengaruh Perubahan Beban pada Area 1 [9]
Peningkatan luas beban area 1 oleh 𝛥𝑃𝐿1 menghasilkan pengurangan frekuensi pada kedua area dan aliran tie-line𝛥𝑃12. 𝛥𝑃12 bertanda negatif menunjukkan arus dari area 2 ke area 1. Deviasi
tie-line merupakan cerimanan dari kontribusi regulasi karakteristik dari satu area ke area lainnya. Demikian untuk perubahan beban di area 2 oleh 𝛥𝑃𝐿2 menghasilkan persamaan 2.13-2.14.
𝛥𝑓 = −𝛥𝑃𝐿2
𝛽1+ 𝛽2 (2.13)
𝛥𝑃12= −𝛥𝑃21=
𝛥𝑃𝐿2𝛽1
𝛽1+ 𝛽2 (2.14)
Persamaan 2.13 dan 2.14 merupakan bentuk dasar dari load frequency control untuk sistem interkoneksi.
Universitas Pertamina - 15
2.2.5
Frequency Bias Tie-Line Control
Supplementary control bertujuan untuk mengembalikkan keseimbangan antara area beban dan pembangkit daya. Keseimbangan antara setiap area beban dan pembangkit daya dapat dipenuhi ketika nilai frekuensi telah ditetapkan dan terjadinya pertukaran daya dengan area yang saling berdekatan pada nilai yang telah ditentukan.
Perubahan objek dikarenakan kontrol tambahan yang dipasang di area tertentu. Dengan kata lain, apabila terjadi perubahan beban pada area 1, maka harus terdapat tindakan kontrol tambahan hanya di area 1 dan tidak berlaku pada area 2. Jika dilihat kembali persamaan 2.11 – 2.14 menunjukkan bahwa sinyal kontrol yang terdiri dari deviasi aliran tie-line ditambah dengan deviasi kesetaraan yang menyatu oleh faktor bias akan menghasilkan output yang sesuai. Sinyal kontrol ini dimaksud sebagai area control error (ACE).
Dari persamaan 2.9 dan 2.10, terlihat bahwa faktor bias yang sesuai untuk suatu area merupakan karakteristik respon frekuensi 𝛽. Dengan demikian, eror kontrol yang terjadi pada area 2 adalah.
𝐴𝐶𝐸2= 𝛥𝑃21+ 𝐵2𝛥𝑓 (2.15) 𝐵2= 𝛽2= 1 𝑅2 + 𝐷2 (2.16) Pada area 1, 𝐴𝐶𝐸1 = 𝛥𝑃12+ 𝐵1𝛥𝑓 (2.17) 𝐵1= 𝛽1= 1 𝑅1 + 𝐷1 (2.18)
Blok diagram pada Gambar 2.6 menerangkan sistem kontrol tambahan yang diterapkan. Penerapan dilakukan pada unit yang dipilih di setiap area dan beroperasi sesuai dengan set-point
yang diterapkan oleh referensi beban. karakteristik respon frekuensi area yang diperlukan untuk menetapkan faktor bias dapat diperkirakan dengan melihat grafik setelah terjadi gangguan signifikan, misalnya kehilangan daya secara tiba-tiba. Dengan menggunakan pertimbangan performa steady-state, pilihan faktor bias dapat diabaikan. Setiap kombinasi area control error (ACE) yang terdapat pada komponen deviasi tie-line dan frekuensi akan menghasilkan mutasi steady-state pada arus dan frekuensi. Performa kontrol integral menunjukkan bahwa terjadi penurunan pada ACE menjadi nol. Maka dari itu, perlu dicermati kesalahan sinyal kontrol area yang berlaku pada sistem dua area di persamaan 2.19 dan 2.20.
𝐴𝐶𝐸1= 𝐴1𝛥𝑃12+ 𝐵1𝛥𝑓= 0 (2.19)
𝐴𝐶𝐸2= 𝐴2𝛥𝑃21+ 𝐵2𝛥𝑓= 0 (2.20)
Persamaan 2.19 – 2.20 menghasilkan nilai 𝛥𝑃12= 0 dan 𝛥𝑓= 0 untuk semua variabel yang tidak bernilai 0 seperti, A1, A2 dan B1, B2. Namun, komposisi sinyal eror pada kontrol area lebih penting dari pertimbangan kinerja yang dinamis. Hal ini diilustrasikan dengan mempertimbangkan respon transien sistem AGC terhadap kenaikan beban area 1 secara tiba-tiba. Peningkatan beban yang tiba-tiba akan mengakibatkan penurunan frekuensi sistem, diikuti oleh respon governor (unit kontrol kecepatan utama di kedua area) yang mampu membatasi frekuensi maksimum. Selanjutnya, terjadi penyimpangan frekuensi kembali ke nilai 𝛥fR ditentukan oleh karakteristik regulasi kedua sistem.
Universitas Pertamina - 16
𝛥𝑓𝑅=
−𝛥𝑃𝐿1
𝛽1+ 𝛽2 (2.21)
2.2.6
Automatic Generation Control Multi Area
Sistem multi area merupakan suatu sistem tenaga listrik yang terdiri dari unit-unit pembangkit yang berada secara terpisah, namun terhubung satu sama lain dengan satu atau lebih jaringan transmisi. Pada Gambar 2.11 merupakan implementasi AGC dua area.
Turbine Turbine Governor Governor T Load ref 1 Turbine Turbine Governor Governor Load ref 1 del_PL1 del_PL1
Gambar 2.11 Blok Diagram Sistem Dua Area Dengan AGC [9]
Pada Gambar 2.11 terdapat deviasi tie-line dari nilai yang ditetapkan. Kontrol tambahan lebih lambat dibanding kontrol kecepatan utama. Dapat dilihat dari performa kontrol tambahan untuk pengaturan yang berbeda dari frekuensi bias di setiap area pada saat penyimpangan frekuensi adalah
𝛥𝑓𝑅.
Dengan B1 = 𝛽1, B2 = 𝛽2, maka didapat.
𝐴𝐶𝐸1= 𝛥𝑃12+ 𝐵1𝛥𝑓𝑅
= −𝛥𝑃𝐿1
𝛽1+𝛽2(𝛽1+ 𝛽2)
= −𝛥𝑃𝐿1
Universitas Pertamina - 17 Dan pada area 2 didapat,
𝐴𝐶𝐸2 = 𝛥𝑃21+ 𝐵2𝛥𝑓𝑅
= 𝛥𝑃𝐿1
𝛽1+𝛽2(𝛽1+ 𝛽2)
= 0
(2.23)
Kontrol tambahan di area 1 akan merespon 𝛥𝑃𝐿1 dan mengubah generasi sehingga membawa ACE menjadi 0. Dengan demikian, perubahan beban area 1 tidak dapat diamati pada kontrol tambahan di area 2. Jika pada sisi lain, nilai 𝛽1 dan 𝛽2dilipatgandakan karakteristik respon frekuensi masing-masing area, maka.
𝐴𝐶𝐸1= 𝛥𝑃12+ 𝐵1𝛥𝑓𝑅 = −𝛥𝑃𝐿1 𝛽1+𝛽2(𝛽1+ 2𝛽2) = −𝛥𝑃𝐿1(1 − 1 𝛽2) (2.24)
Berlaku juga pada area 2,
𝐴𝐶𝐸2= −𝛥𝑃21+ 2𝐵2𝛥𝑓𝑅
=−𝛥𝑃𝐿1 𝛽2
(2.25)
Dengan demikian, kontrol tambahan area 1 dan area 2 akan merespon serta mampu memperbaiki deviasi frekuensi dua kali lebih cepat. Namun, pembangkit yang diambil oleh area 2 akan menggambarkan sebagai komponen ACE2 dan mengembalikan dalam kondisi stabil. Namun, jika faktor bias secara signifikan lebih rendah dari area 𝛽2, maka situasi akan berbalik. Kontrol tambahan area 2 akan cenderung melambat dan mundur dari pembangkit yang diambil oleh generator sebagai hasil dari kontrol kecepatan utama atau tindakan governor. Dampaknya akan terjadi penurunan kontrol frekuensi sistem.
Stabilitas kontrol tidak merekomendasikan nilai faktor bias yang sangat tinggi. Pada nilai-nilai yang secara signifikan lebih dari pada area 𝛽, tindakan kontrol menjadi tidak stabil. Kesesuaian pengaturan faktor bias frekuensi B hampir sama dengan luas 𝛽dari pertimbangan dinamis yang telah dianalisa oleh sejumlah peneliti [9].
2.3
Persamaan Ayunan
Dalam sebuah mesin sinkron, penggerak utama memberikan sebuah torsi mekanis Tm pada poros mesin yang menghasilkan suatu torsi elektromagnetik Te. Jika torsi mekanis lebih besar daripada torsi elektromagnetik disebabkan dari gangguan, maka torsi percepatan Ta dapat dituliskan pada persamaan 2.26.
𝑇𝑎= 𝑇𝑚− 𝑇𝑒 (2.26)
Keterangan : Ta = Torsi percepatan
Universitas Pertamina - 18
Tm = Torsi mekanis
Terdapat torsi lain yang disebabkan oleh gesekan, rugi-rugi inti, dan angin dalam mesin dapat diabaikan. Ta memiliki efek mempercepat mesin dengan inersia J dalam satuan kg.m2 yang terdiri
dari inersia generator dan penggerak utama. Oleh karena itu, dapat dituliskan persamaan 2.27 sebagai berikut.
𝐽(𝑑𝜔𝑚)
𝑑𝑡 = 𝑇𝑎= 𝑇𝑚− 𝑇𝑒 (2.27)
Secara umum persamaan 2.27 menunjukkan persamaan inersia mesin yang konstan. Jika 𝜔0𝑚 adalah rentang kecepatan sudut mekanik dalam rad/s, J dapat dirumuskan pada persamaan 2.28.
𝐽2𝐻
𝜔0𝑚2[𝑉𝐴]𝑑𝑎𝑠𝑎𝑟 (2.28)
Keterangan : H = konstanta inersia mesin dalam satuan MJ/MVA
VA dasar = daya dasar dalam satuan MVA Sehingga,
𝐽2𝐻
𝜔0𝑚2[𝑉𝐴]𝑑𝑎𝑠𝑎𝑟
𝑑𝜔𝑚
𝑑𝑡 = 𝑇𝑚− 𝑇𝑒 (2.29)
Jika 𝜔𝑟 menunjukkan kecepatan sudut rotor dalam satuan rad/s dan nilai 𝜔0 pada rentangnya, maka persamaan 2.30 dapat ditulis.
2𝐻(𝑑𝜔𝑟) 𝑑𝑡 = 𝑇𝑚− 𝑇𝑒 (2.30) (𝑑𝜔𝑟) 𝑑𝑡 = (𝑑2𝛿) (𝜔0𝑑𝑡2) (2.31)
𝛿 merupakan posisi sudut dari rotor sehubungan dengan suatu putaran sinkron terhadap titik nominal. Berdasarkan persamaan 2.30 dan 2.31 akan diperoleh.
2𝐻 𝜔0
.(𝑑
2𝛿)
(𝑑𝑡2) = 𝑇𝑚− 𝑇𝑒 (2.32)
Daya adalah hasil kali momen putar dengan kecepatan sudut, maka.
2𝐻 𝜔0 .𝑑𝜔 𝑑𝑡 = 𝑃𝑚− 𝑃𝑒 (2.33) 𝑑𝛿 𝑑𝑡 = 𝑑𝜃 𝑑𝑡 − 𝜔𝑠 (2.34) 𝑑𝛿 𝑑𝑡 = 𝜔 − 𝜔𝑠 (2.35)
Pada sistem yang stabil ketika adanya gangguan, sudut rotor akan berosilasi di sekitar titik kesetimbangan. Ketika terjadi gangguan atau penambahan beban secara tiba-tiba dalam jumlah yang besar, maka daya output elektris generator akan jauh melampaui daya input mekanis. Kekurangan pada generator akan disuplai dengan berkurangnya energi kinetis generator. Jadi generator akan
Universitas Pertamina - 19 berputar lebih lambat sehingga sudut daya generator bertambah besar dan daya input generator juga bertambah. Jika sudut rotor meningkat tanpa batas, mesin dapat dikatakan tidak stabil selama mesin mempercepat dan tidak mencapai keadaan keseimbangan terbaru. Dalam sistem multi mesin, mesin akan melepas sinkronisasi dengan mesin lainnya [9].
2.4
Model Pengendalian Daya Aktif dan Frekuensi
Pada pengendalian daya aktif dan frekuensi diperlukan masing-masing komponen yang berperan dalam pengaturan frekuensi yang dapat dimodelkan dalam bentuk persamaan matematis meliputi, model generator, model beban, model penggerak turbin, dan model governor.
2.4.1
Pemodelan Generator
Model matematis generator dapat dituliskan ke dalam sebuah persamaan 2.36.
𝛥𝜔(𝑠) = 1 2𝐻𝑠
[𝛥𝑃𝑚(𝑠) − 𝛥𝑃𝑒(𝑠)] (2.36)
Keterangan : 𝛥𝜔(𝑠) = Perubahan kecepatan dalam satuan rad/s
H = Konstanta inersia
𝛥𝑃𝑚(𝑠) = Perubahan daya mekanik
𝛥𝑃𝑒(𝑠) = Perubahan daya akibat perubahan beban dalam satuan watt Adapun blok diagram dari persamaan 2.36 dapat dilihat pada Gambar 2.12.
Gambar 2.12 Blok Diagram Pemodelan Generator [8]
2.4.2
Pemodelan Beban
Komponen 𝛥𝑃𝑒(𝑠) merupakan penjumlahan antara komponen frekuensi D𝛥𝜔 dan non-frekuensi 𝛥𝑃𝐿, seperti persamaan 2.37 berikut.
Universitas Pertamina - 20
Gambar 2.13 Blok Diagram Pemodelan Generator dan Beban
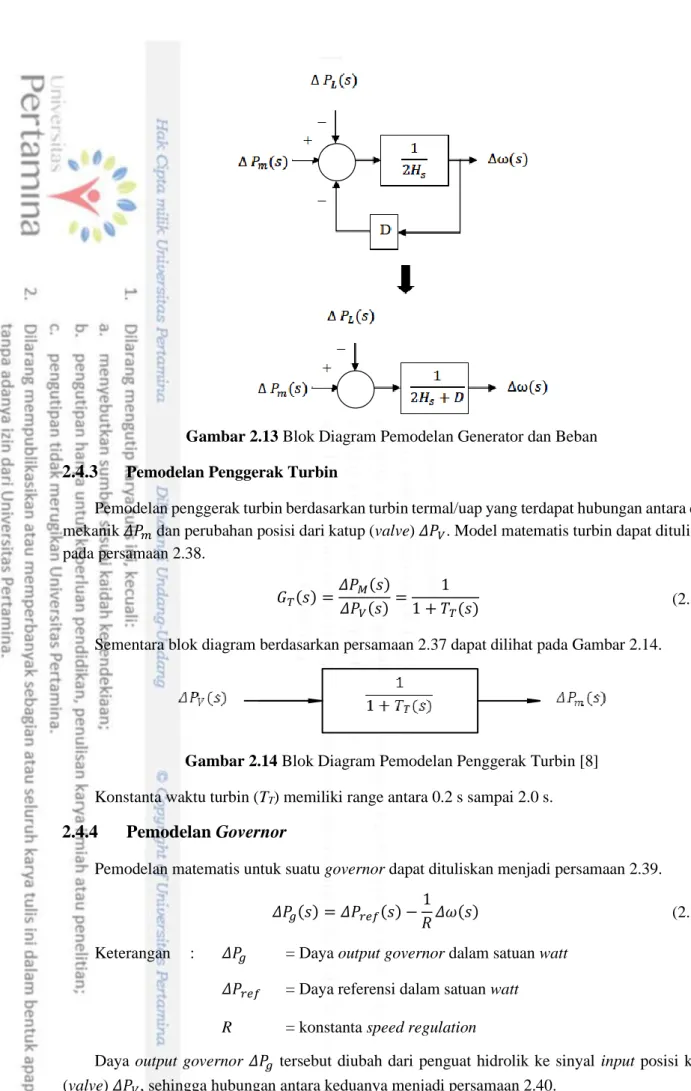
2.4.3
Pemodelan Penggerak TurbinPemodelan penggerak turbin berdasarkan turbin termal/uap yang terdapat hubungan antara daya mekanik 𝛥𝑃𝑚 dan perubahan posisi dari katup (valve) 𝛥𝑃𝑉. Model matematis turbin dapat dituliskan pada persamaan 2.38. 𝐺𝑇(𝑠) = 𝛥𝑃𝑀(𝑠) 𝛥𝑃𝑉(𝑠) = 1 1 + 𝑇𝑇(𝑠) (2.38)
Sementara blok diagram berdasarkan persamaan 2.37 dapat dilihat pada Gambar 2.14.
Gambar 2.14 Blok Diagram Pemodelan Penggerak Turbin [8] Konstanta waktu turbin (TT) memiliki range antara 0.2 s sampai 2.0 s.
2.4.4
Pemodelan Governor
Pemodelan matematis untuk suatu governor dapat dituliskan menjadi persamaan 2.39.
𝛥𝑃𝑔(𝑠) = 𝛥𝑃𝑟𝑒𝑓(𝑠) −
1
𝑅𝛥𝜔(𝑠) (2.39)
Keterangan : 𝛥𝑃𝑔 = Daya outputgovernor dalam satuan watt
𝛥𝑃𝑟𝑒𝑓 = Daya referensi dalam satuan watt
R = konstanta speed regulation
Daya output governor 𝛥𝑃𝑔 tersebut diubah dari penguat hidrolik ke sinyal input posisi katup (valve) 𝛥𝑃𝑉, sehingga hubungan antara keduanya menjadi persamaan 2.40.
Universitas Pertamina - 21
𝛥𝑃𝑉(𝑠) =
1 1 + 𝑇𝑔(𝑠)
𝛥𝑃𝑔(𝑠) (2.40)
Dengan Tg sebagai konstanta waktu governor. Sehingga persamaannya dapat direpresentasikan
dalam blok diagram seperti pada Gambar 2.15.
Gambar 2.15 Blok Diagram Pemodelan Governor [8]
2.5
Pembangkit Energi Baru Terbarukan
Konsumsi energi fosil dalam pemenuhan kebutuhan energi listrik sangat besar. Pada tahun 2013 yang menyebutkan bahwa jumlah pembangkit listrik tenagaa uap (PLTU) di dunia sudah mencapai 2300 unit (7000 unit individu) [10]. Penggunaan energi fosil dalam pemenuhan energi listrik lambat laun akan menimbulkan dampak negatif terhadap lingkungan. Salah satu dampak negatif yang terjadi, yaitu pemanasan global (global warming). Akibat makin banyaknya dampak negatif yang timbul akibat penggunan energi fosil, maka telah banyak negara mulai transisi ke energi baru terbarukan dengan membangun dan mengembangkat berbagai jenis pembangkit listrik melalui energi alternatif. Beberapa pembangkit listrik yang bersumber dari energi baru terbarukan seperti, pembangkit listrik tenaga bayu/angin (PLTB).
𝛥𝑃𝑃𝐸𝐵𝑇= 𝛥𝑃𝑊𝑇 (2.41)
PLTB adalah pembangkit listrik yang dapat melakukan perubahan bentuk energi dari energi potensial angin menadi energi listrik. Energi angin memutar turbin kincir angin dan menyebabkan berputarnya rotor generator sehingga dapat menghasilkan energi listrik. Saat ini, sistem PLTB mendapat perhatian cukup besar sebagai sumber energi alternatif yang bersih, aman, dan ramah lingkungan. Turbin angin dalam skala kecil memiliki peranan penting terutama bagi daerah-daerah yang belum terjangkau oleh jaringan listrik. PLTB akan interkoneksi dengan jaringan utama, sehingga sistem menjadi lebih handal ketika adanya kebutuhan beban yang tinggi. PLTB dapat direpresentasikan ke dalam persamaan matematis, seperti pada persamaan 2.42.
𝛥𝑃𝑊𝑇 =
1 1 + 𝑠𝑇𝑊𝑇
(𝛥𝑃𝐴𝑛𝑔𝑖𝑛) (2.42)
Keterangan : 𝛥𝑃𝑊𝑇 = Perubahan daya output PLTB (inisial kecepatan angin).
𝑇𝑊𝑇 = Konstanta waktu dalam satuan s.
Perkembangan ilmu pengetahuan memicu pemikiran manusia agar mampu berinovasi khususnya di bidang energi. Saat ini, telah banyak dilakukan riset dan penelitian mengenai energi baru terbarukan yang lebih ramah lingkungan. Pentingnya pemanfaatan energi baru terbarukan bukan hanya berdampak pada makhluk hidup, namun juga berdampak pada bumi. Seperti yang diketahui, energi konvensional tidak akan bertahan lama, Misalnya, pembangkit listrik tenaga surya (PLTS)
Universitas Pertamina - 22
dan pembangkit listrik tenaga bayu (PLTB). Sampai akhir tahun 2013, energi listrik yang dihasilkan dari turbin angin mencapai 318,5 GW dan menyumbang 4% dari total kebutuhan listrik secara global. Cina masih menjadi negara terdepan dalam pemanfaatan energi angin dengan tambahan kapasitas baru sebesar 16 GW dan total kapasitas terpasang sebesar 91 GW. Jika dibandingkan dengan Amerika Serikat, pemanfaatan PLTB cenderung turun pada tahun 2013 dengan menambah 1 GW. Asia memiliki jumlah kapasitas yang hampir sama dengan Eropa sebesar 119 GW dan diprediksi akan melampaui Eropa pada tahun 2014 sebagai benua yang menggunakan energi angin terbesar. Indonesia merupakan negara kepulauan dengan 2/3 wilayahnya adalah perairan dan mempunyai garis pantai terpanjang di dunia yaitu, ±80.790 km yang sangat memiliki potensial untuk pengembangan PLTB.
2.6
Virtual Inertia Control Berbasis SMES
Virtual inersia adalah kombinasi dari algoritma kontrol, EBT, sistem penyimpanan energi, dan elektronika daya yang meningkatkan inersia sistem jaring konvensional [11]. Konsep virtual inersia dirangkum pada Gambar 2.16. Inti dari sistem ini adalah algoritma virtual inersia yang menghadirkan berbagai sumber energi yang saling terhubung pada jaringan melalui konverter elektronika daya sebagai generator sinkron. Pada umumnya, kecepatan angin diimplementasikan sebagai turbin angin dan dihubungkan melalui konverter back-to-back yang sepenuhnya memisahkan inersia sistem dari jaringan. Demikian pula, sistem penyimpanan energi memiliki konverter DC-DC dan inverter di awal-akhir, dan tidak berkontribusi pada respon inersia [12].
Gambar 2.16 Diagram Virtual Inersia
Sistem pada virtual inersia berdasarkan umpan balik tegangan dari output inverter yang menghasilkan sinyal pengenal untuk menyajikan sumber daya generator [13]. Walaupun konsep dasar yang mendasari virtual inersia serupa dari berbagai literatur, namun implementasinya cukup bervariasi berdasarkan aplikasi dan tingkat kecanggihan model yang diinginkan. Beberapa literatur mencoba meniru kebiasaan generator melalui model matematika yang detail. Pendekatan lain mencoba menyederhanakan dengan hanya menggunakan persamaan yang mendekati perilaku generator, sementara yang lain menggunakan pendekatan yang membuat unit generator distribusi lebih responsif terhadap perubahan frekuensi dalam sistem jaring. Berdasarkan persamaan 2.36 – 2.43, maka pemodelan matematis dapat ditulis sesuai dengan persamaan 2.44 dan 2.45.
Universitas Pertamina - 23 Keterangan : 𝑇𝑉𝐼 = Konstanta waktu virtual inersia
𝛥𝑓 = 1
2𝐻𝑠 + 𝐷(𝛥𝑃𝑚+ 𝛥𝑃𝑃𝐸𝐵𝑇+ 𝛥𝑃𝑖𝑛𝑒𝑟𝑠𝑖𝑎− 𝛥𝑃𝐿)
(2.45)
2.6.1
Superconducting Magnetic Energy Storage
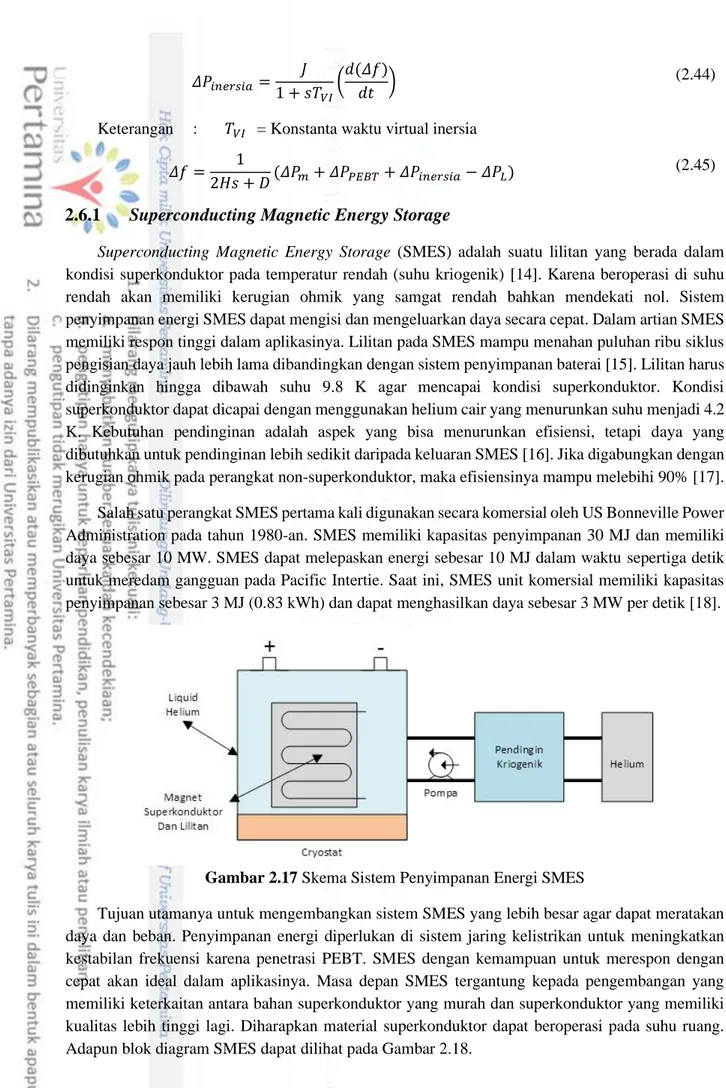
Superconducting Magnetic Energy Storage (SMES) adalah suatu lilitan yang berada dalam kondisi superkonduktor pada temperatur rendah (suhu kriogenik) [14]. Karena beroperasi di suhu rendah akan memiliki kerugian ohmik yang samgat rendah bahkan mendekati nol. Sistem penyimpanan energi SMES dapat mengisi dan mengeluarkan daya secara cepat. Dalam artian SMES memiliki respon tinggi dalam aplikasinya. Lilitan pada SMES mampu menahan puluhan ribu siklus pengisian daya jauh lebih lama dibandingkan dengan sistem penyimpanan baterai [15]. Lilitan harus didinginkan hingga dibawah suhu 9.8 K agar mencapai kondisi superkonduktor. Kondisi superkonduktor dapat dicapai dengan menggunakan helium cair yang menurunkan suhu menjadi 4.2 K. Kebutuhan pendinginan adalah aspek yang bisa menurunkan efisiensi, tetapi daya yang dibutuhkan untuk pendinginan lebih sedikit daripada keluaran SMES [16]. Jika digabungkan dengan kerugian ohmik pada perangkat non-superkonduktor, maka efisiensinya mampu melebihi 90% [17]. Salah satu perangkat SMES pertama kali digunakan secara komersial oleh US Bonneville Power Administration pada tahun 1980-an. SMES memiliki kapasitas penyimpanan 30 MJ dan memiliki daya sebesar 10 MW. SMES dapat melepaskan energi sebesar 10 MJ dalam waktu sepertiga detik untuk meredam gangguan pada Pacific Intertie. Saat ini, SMES unit komersial memiliki kapasitas penyimpanan sebesar 3 MJ (0.83 kWh) dan dapat menghasilkan daya sebesar 3 MW per detik [18].
Gambar 2.17 Skema Sistem Penyimpanan Energi SMES
Tujuan utamanya untuk mengembangkan sistem SMES yang lebih besar agar dapat meratakan daya dan beban. Penyimpanan energi diperlukan di sistem jaring kelistrikan untuk meningkatkan kestabilan frekuensi karena penetrasi PEBT. SMES dengan kemampuan untuk merespon dengan cepat akan ideal dalam aplikasinya. Masa depan SMES tergantung kepada pengembangan yang memiliki keterkaitan antara bahan superkonduktor yang murah dan superkonduktor yang memiliki kualitas lebih tinggi lagi. Diharapkan material superkonduktor dapat beroperasi pada suhu ruang. Adapun blok diagram SMES dapat dilihat pada Gambar 2.18.
𝛥𝑃𝑖𝑛𝑒𝑟𝑠𝑖𝑎 = 𝐽 1 + 𝑠𝑇𝑉𝐼 (𝑑(𝛥𝑓) 𝑑𝑡 ) (2.44)
Universitas Pertamina - 24 del_Id0 del_Ed KSMES Kid 1 1 + 1 Id0 del_Ed + del_Id del_Psmes del_f Limiter Superconducting Magnetic Energy Storage
Gambar 2.18 Blok Diagram SMES [19]
Persamaan dinamik dari deviasi tegangan induksi 𝛥𝐸𝑑 dan perubahan arus induktor 𝛥𝐼𝑑 dapat dituliskan pada persamaan 2.46.
𝛥𝐸𝑑 = 𝐾𝑆𝑀𝐸𝑆 1 + 𝑠𝑇𝐷𝐶 . 𝛥𝑓 − 𝛥𝐾𝑖𝑑. 𝛥𝐼𝑑 (2.46) 𝛥𝐼𝑑= 1 𝑠𝐿𝛥𝐸𝑑 (2.47)
Keterangan : 𝐾𝑆𝑀𝐸𝑆 = Nilai gain kontrol SMES
𝛥𝐾𝑖𝑑 = Feedback gain untuk 𝛥𝐼𝑑
𝑇𝐷𝐶 = Konstanta waktu SMES
L = Lilitan induksi
𝐼𝑑0 = Nilai nominal arus pada SMES Dengan demikian, dapat dituliskan persamaan 2.48.
Universitas Pertamina - 27
BAB III KONSEP PERANCANGAN
3.1
Diagram Alir Perancangan
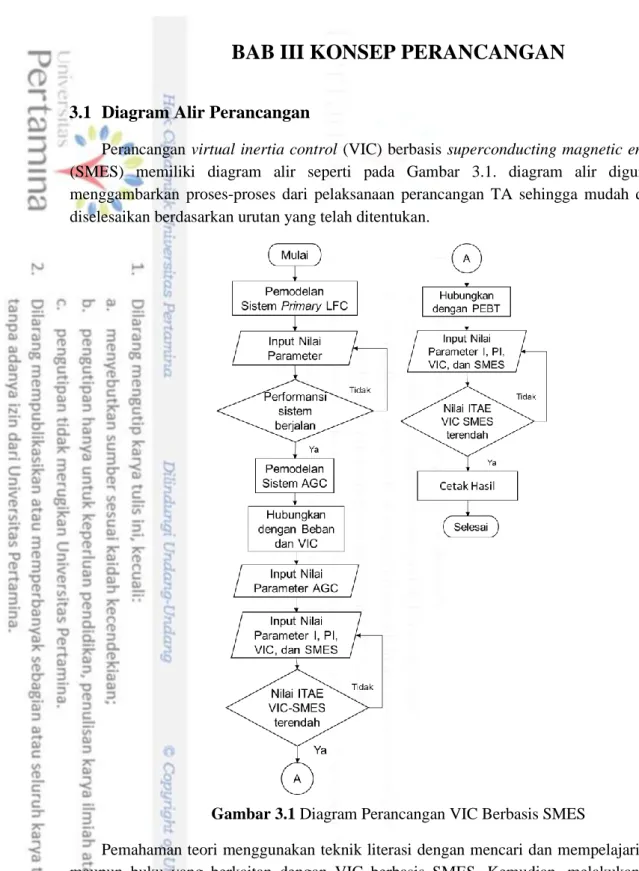
Perancangan virtual inertia control (VIC) berbasis superconducting magnetic energy storage
(SMES) memiliki diagram alir seperti pada Gambar 3.1. diagram alir digunakan untuk menggambarkan proses-proses dari pelaksanaan perancangan TA sehingga mudah dipahami dan diselesaikan berdasarkan urutan yang telah ditentukan.
Gambar 3.1 Diagram Perancangan VIC Berbasis SMES
Pemahaman teori menggunakan teknik literasi dengan mencari dan mempelajari jurnal-jurnal maupun buku yang berkaitan dengan VIC berbasis SMES. Kemudian, melakukan pemahaman mengenai pemodelan VIC berbasis SMES dengan menggunakan parameter yang diambil dari jurnal acuan. Pemodelan dilakukan pada SIMULINK dengan memberikan input berupa nilai parameter yang telah ditentukan. Pengujian dilakukan untuk mendapatkan hasil nilai indeks performansi berbasis integral time square error (ITAE) terendah. Beberapa skenario telah dibentuk, kemudian setiap hasil dari skenario akan dibandingkan menggunakan ITAE. Setelah didapatkan nilai indeks performansi berbasis ITAE terendah, tahap selanjutnya melakukan penyesuaian laporan TA. Laporan TA berisi mengenai pendahuluan, tinjauan pustaka, konsep perancangan, analisa hasil, dan kesimpulan.
![Gambar 2.2 Sistem Kontrol Kompleks [7]](https://thumb-ap.123doks.com/thumbv2/123dok/1904633.2669576/33.892.60.785.60.1058/gambar-sistem-kontrol-kompleks.webp)
![Gambar 2.6 AGC Power System Single Area [8]](https://thumb-ap.123doks.com/thumbv2/123dok/1904633.2669576/35.892.57.784.55.1059/gambar-agc-power-system-single-area.webp)
![Gambar 2.9 Blok Diagram AGC Terinterkoneksi Power System [9]](https://thumb-ap.123doks.com/thumbv2/123dok/1904633.2669576/37.892.58.785.50.671/gambar-blok-diagram-agc-terinterkoneksi-power-system.webp)
![Gambar 2.10 Pengaruh Perubahan Beban pada Area 1 [9]](https://thumb-ap.123doks.com/thumbv2/123dok/1904633.2669576/38.892.41.768.77.1098/gambar-pengaruh-perubahan-beban-pada-area.webp)
![Gambar 2.11 Blok Diagram Sistem Dua Area Dengan AGC [9]](https://thumb-ap.123doks.com/thumbv2/123dok/1904633.2669576/40.892.46.743.70.926/gambar-blok-diagram-sistem-dua-area-dengan-agc.webp)
![Gambar 2.12 Blok Diagram Pemodelan Generator [8]](https://thumb-ap.123doks.com/thumbv2/123dok/1904633.2669576/43.892.58.778.69.1257/gambar-blok-diagram-pemodelan-generator.webp)
![Gambar 2.15 Blok Diagram Pemodelan Governor [8]](https://thumb-ap.123doks.com/thumbv2/123dok/1904633.2669576/45.892.56.797.62.1215/gambar-blok-diagram-pemodelan-governor.webp)