Perpustakaan Universitas Gunadarma BARCODE
BUKTI UNGGAH DOKUMEN PENELITIAN PERPUSTAKAAN UNIVERSITAS GUNADARMA
Nomor Pengunggahan
SURAT KETERANGAN
Nomor: 46/PERPUS/UG/2020
Surat ini menerangkan bahwa:
Nama Penulis : LINTANG MAULIDYATAMA SANDITIA SETIAJI
Nomor Penulis : 24116065
Email Penulis : [email protected]
Alamat Penulis : KP JATIKRAMAT
dengan penulis lainnya sebagai berikut:
Penulis ke-2/Nomor/Email : Mariza Wijayanti / 110601 / [email protected]
Telah menyerahkan hasil penelitian/ penulisan untuk disimpan dan dimanfaatkan di Perpustakaan Universitas Gunadarma, dengan rincian sebagai berikut :
Nomor Induk : FILKOM/KB/PENELITIAN/46/2020
Judul Penelitian : PROTOTYPE PENYORTIR BENDA BERDASARKAN WARNA BERBASIS ARDUINO MEGA 2560
Tanggal Penyerahan : 13 / 03 / 2020
Demikian surat ini dibuat untuk dipergunakan seperlunya dilingkungan Universitas Gunadarma dan Kopertis Wilayah III.
22
PROTOTYPE PENYORTIR BENDA BERDASARKAN WARNA BERBASIS ARDUINO MEGA 2560
1Lintang Maulidyatama Sanditia Setiaji, 2Mariza Wijayanti
1,2Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Gunadarma
Jl. Margonda Raya No. 100, Depok 16424, Jawa Barat
1[email protected] ,2[email protected]
ABSTRAK
Prototype alat mekanik seperti robot tangan yang dapat menggantikan manusia untuk mengerjakan suatu pekerjaan, baik secara otomatis yang menggunakan program maupun dalam pengawasan dan kendali manusia. Robot digunakan untuk membantu manusia dalam melakukan pekerjaan yang berbahaya, tugas berat, pekerjaan berulang dan kotor. Pada penelitian ini, simulasi robot yang digunakan adalah simulasi robot pemindah benda berdasarkan warna dengan menggunakan sistem kontrol arduino mega, sensor warna TCS 3200 dan motor servo. Langkah pertama penulis membuat program yang akan dimasukkan ke dalam arduino mega yang sudah terhubung dengan perangkat pendukung lainnya. Maka secara otomatis simualsi robot tersebut akan bergerak untuk mengambil barang dan mengarahkan ke sensor warna, sensor akanmembaca warna pada benda sesuai dengan masukan data dari sensor warna TCS 3200 dan secara otomatis motor servo bergerak untuk meletakkan barang di tempat yang sesuai dengan warna tersebut. Dari pengujian dapat disimpulkan, simulasi robot dapat menyortir benda sesuai warna yang telah di tentukan,dan memindahkan benda tersebut masuk kedalam tempat yang telah di tentukan sesuai warna yang telah di sortir. Tujuan dari penelitian ini untuk membantu manusia menyortir barang atau benda berdasarkan warna dengan mengendalikan prototype robot tangan.
Kata Kunci : Arduino Mega , Sensor Warna, Servo, Gripper
PENDAHULUAN Latar Belakang
Kemajuan teknologi yang sangat cepat dan pesat di saat ini mempengaruhi kehidupan manusia diberbagai aspek. Pemanfaatan teknologi oleh manusia dapat membantu pekerjaan manusia menjadi lebih mudah dan cepat. Salah satu contohnya adalah dalam penyortir barang berdasarkan warna, ukuran dan bentuk barang. Sistem penyortir ini dikendalikan oleh manusia karena masih sistem manual, dapat berupa sistem barcode, ataupun otomatisasi dengan mesin. Sistem penyortir berdasarkan warna dapat dilakukan dengan berbagai metode.
Pada bidang industri, peralatan manual digantikan dengan peralatan elektronik yang dapat dikendalikan secara otomatis. Peralatan ini biasanya digunakan untuk membantu pekerjaan, mengurangi biaya, menghemat waktu, dan tenaga.
Berbagai inovasi dan ide dalam menciptakan peralatan yang digunakan untuk membantu masyarakat supaya dapat mempermudah aktifitas sehari-hari. Penelitian ini membuat alat yang dapat digunakan sebagai penyortir benda berdasarkan warna, berguna untuk memindahkan barang atau suatu benda hanya dengan mengendalikan sistem.
Motor Servo
Motor servo pada dasarnya dibuat menggunakan motor DC yang dilengkapi dengan controler dan sensor posisi sehingga dapat memiliki gerakan 0o, 90o, 180o atau 360o. Motor pada sebuah motor servo adalah motor DC yang dikendalikan oleh bagian controler, kemudian komponen yang berfungsi sebagai sensor adalah potensiometer yang terhubung pada sistem girbox pada motor servo.
Gambar 1 Motor Servo Sensor Warna TCS320
Module sensor yang mempunyai fungsi mengkonversi warna yang akan dideteksi menjadi Frekuensi yang akan diolah oleh mikrokontroler. Nama lain dari sensor ini yaitu Programmable Converter ‘Color Light’ Sensor to Frequency. yang dimana bahan pembuatannya berasal dari penggabungan antara Silicon Photodioda dan IC CMOSyang berfungsi sebagai pengkonversi arus menjadi frekuensi. Keluaran dari sensor warna ini yaitu berupa gelombang persegi dengan modulasi 50% yang dimana berbanding lurus dengan intensitas cahaya yang terbaca oleh sensor.
Gambar 2 Sensor Warna TCS3200
Pada sensor terdapat sebuah photodioda dengan array 8 x 8 yang mengkonversi warna menjadi frekuensi, yang terdiri dari :
a) 16 dioda untuk filter merah b) 16 dioda untuk filter hijau c) 16 dioda untuk filter biru
d) 16 dioda untuk clear (tanpa filter)
Dari kesemua dioda diatas terhubung ke dalam rangkaian paralel yang menggunakan metode switching pin (S0,S1,S2,S3).
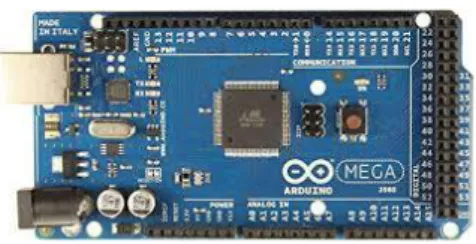
Arduino Mega 2560
Arduino Mega 2560 adalah papan microcontroller berbasiskan Atmega 2560. Arduino Mega 2560 seperti gambar 3 memiliki 54 pin digital input / output, dimana 15 pin dapat digunakan sebagai outputPWM, 16 pin sebagai input analog, dan 4 pin sebagai UART (portserial hardware), 16 MHz kristal osilator, koneksi USB, jack power, headerICSP, dan tombol reset. Ini semua yang diperlukan untuk mendukung microcontroller. Arduino Mega 2560 Revisi 2 memiliki resistor penarik jalur HWB 8U2 ke Ground, sehingga lebih mudah untuk dimasukkan ke dalam mode DFU.
Gambar 3 Tampilan depan Arduino Mega 2560
Arduino Mega dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal.Sumber daya dipilih secara otomatis.Sumber daya eksternal (non-USB) dapat berasal baik dari adaptor AC-DC atau baterai. Adaptor dapat dihubungkan dengan mencolokkan steker 2,1 mm yang bagian tengahnya terminal positif ke ke jack sumber tegangan pada papan. Jika tegangan berasal dari baterai dapat langsung dihubungkan melalui header pin Gnd dan pin Vin dari konektor POWER.
Perangkat Lunak (IDE Arduino)
Integrated Development Environment(IDE) Arduino merupakan aplikasi yang mencakup editor, compiler, dan uploader dapat menggunakan semua seri modul keluarga Arduino, seperti Arduino Duemilanove, Uno, Bluetooth, Mega. Kecuali ada beberapa tipe produksi Arduino yang memakai microcontroller di luar seri AVR, seperti mikroprosesor ARM. Saat menulis kode program atau mengkompilasi modul hardware Arduino tidak harus tersambung ke PC atau Notebook, walaupun saat proses unggahan ke board diperlukan modul hardware.
CompilerIDE Ardunino juga memanfaatkan pustaka open source AVRL standar de-facto pustaka referensi dan fungsi register microcontroller AVR. Pustaka AVRLibc ini sudah disertakan dalam satu paket program IDE Arduino.
Kabel Pelangi
Gambar 4 Kabel Pelangi
Kabel pelangi berfungsi untuk menghubungkan jalur pada rangkaian-rangkaian dari pcb matriks. Jalur pelangi juga bisa digunakan untuk menghubungkan komponen-komponen dari jalur yang diletakan berpisah dengan PCB.
Pin Header
Gambar 5 Pin Header
Pin Header dalah konektor banyak pin, yang digunakan untuk menyambung banyak kabel dari satu board ke board yang lain.
Connector Socket DC
DC Connector adalah connector yang diperuntukan kabel yang menghantarkan arus listrik DC.DC connector pada umumnya berbentuk silinder dan memiliki polaritas positif dan negatif.connector Arus DC ini banyak kita temukan di adaptorseperti adaptor laptop, adaptor telepon dan lain sebagainya.
Adaptor
Adaptor adalah sebuah perangkat berupa rangkaian elektronika untuk mengubah tegangan listrik yang besar menjadi tegangan listrik lebih kecil, atau rangkaian untuk mengubah arus bolak-balik (arus AC) menjadi arus searah (arus DC)
Gripper
Gripper adalah sebuah efektor yang berfungsi untuk menggenggam dan menahan objek. Objek ini merupakan sebuah komponen yang akan dipindahkan oleh robot dapat berupa kertas, botol, bahan mentah dan peralatan-peralatan lain.
Ada 3 jenis gripper yang dikenal seperti gripper mekanik, gripper vacuum dan gripper magnetic.Mechanical gripper didesain untuk menggengam dan menahan objek dengan memberikan kontak pada objek. Biasanya menggunakan finger / jari mekanik yang disebut dengan jaws. Finger ini dilepas dan dipasang sehinggasangat fleksibel pemakaiannya. Sumber tenaga yang diberikan pada gripper ini bias berupa phenumatic, hidrolik, dan elektrik.
METOLOGI PENELITIAN
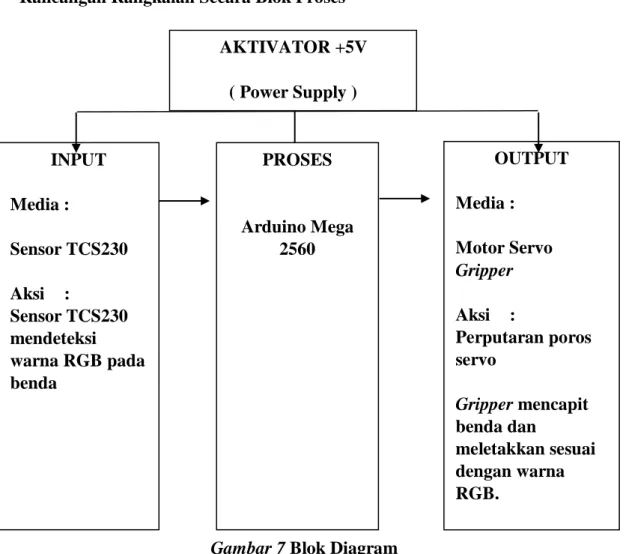
Rancangan Rangkaian Secara Blok Proses
Gambar 7 Blok Diagram
Berdasarkan gambar 7 dapat dilihat rancangan rangkaian secara blok diagram terdiri dari 4 blok yaitu blok aktifator, blok input, blok proses dan blok output. Blok aktifator menjelaskan catu daya yang digunakan untuk mengaktifkan seluruh komponen pada rangkaian, blok input menjelaskan masukan untuk mikrokontroler serta media masukannya, blok proses menjelaskan pemrosesan yang didapat dari masukan agar mendapatkan output yang sesuai, sedangkan blok output menjelaskan keluaran yang dihasilkan serta media keluarannya. Secara rinci uraian pada gambar 10 dapat dijelaskan sebagai berikut: AKTIVATOR +5V ( Power Supply ) PROSES Arduino Mega 2560 LED INPUT Media : Sensor TCS230 Aksi : Sensor TCS230 mendeteksi warna RGB pada benda OUTPUT Media : Motor Servo Gripper Aksi : Perputaran poros servo Gripper mencapit benda dan meletakkan sesuai dengan warna RGB.
24
Blok Aktivator
Sumber tegangan pada rangkain alat ini berkisar pada besaran dari +5v sampai dengan +12v, tegangan tersebut dapat mengoperasikan beberapa komponen diantaranya, sensor warna tcs230, gripper, serta motor servo yang diatur melalui mikrokontroler Arduino Mega2560.
Blok Input
Didalam blok input ini terdapat masukan yaitu dari sensor tsc230, yang berfungsi sebagai pendeteksi warna benda pada saat benda didekatkan di depan sensor tersebut. Setelah sensor merespon, maka motor servo dangripper akan berputar bergerak ke tempat yang sesuai dengan warna benda nya masing-masing.
Blok Proses
Gambar 8 Arduino Mega2560
Blok proses adalah blok yang berfungsi untuk mengontrol kerja dari keseluruhan komponen. Pada Arduino Mega2560 ini terdapat ATMEGA2560 dimana di dalamnya terdapat 54 pin input / output digital (dimana 14 dapat digunakan sebagai output PWM), 16 input analog, 4 UART (port serial perangkat keras), osilator kristal 16 MHz, koneksi USB, colokan listrik, header ICSP, Dan tombol reset. Ini berisi semua yang dibutuhkan untuk mendukung mikrokontroler Cukup hubungkan ke komputer dengan kabel USB atau nyalakan dengan adaptor AC-keDC atau baterai untuk memulai.
Blok Output
Pada blok output terdapatsatu komponen yaitu motor servo dan gripper, motor servo sendiri merupakan output dari hasil input sensor TCS230 (Warna). Output servo berfungsi sebagai pendeteksi warna benda yang mengenai sensor warna dan gripper sebagai sarana dalam proses pencapitan dan meletakan objek pada tempat yang sesuai dengan warna nya.
Rancangan Rangkaian Secara Detail
Gambar 9 Rancangan Rangkaian Sistem Penyortir Benda
Pada rangkaian diatas memerlukan tegangan +5V sampai dengan+12V untuk dapat mengaktifkan Arduino Mega2560, yang digunakan sebagai tempat pemrosesan
24
data dari alat ini. Tegangan tersebut akan di alirkan ke beberapa komponen pendukung seperti, Sensor TCS230 dan Motor servo dan gripper. Input dari rangkaian diatas adalah Sensor TCS230. Jadi saat motor servo dan gripper mengambil sebuah benda maka otomatis gripper mencapit dan akan mengarahkan nya persis kedepan Sensor TCS230 yang nanti nya akan membaca warna dari benda tersebut. Pada Arduino Mega2560, Sensor tcs230 terhubung pada pin2 = s0 , pin3= s1 , pin4 = s2 , pin5 = s3, pin6 = out, Sinar led yang dipantulkan objek berwarna berfungsi untuk mengaktifkan salah satu photodioda pada sensor warna tersebut, sehingga ketika photodioda yang digunakan telah aktif, maka otomatis akan mengirimkan sinyal ke mikrokontroler untuk menginformasikan warna yang dideteksi kemudian di proses oleh Arduino mega dan akan mengeluarkan output motor servo dan gripper yang terhubung pada saat servo 110˚ untuk mengarah ke warna merah, saat servo 70˚ untuk mengarah ke warna hijau dan untuk 40˚ servo akan mengarah ke warna biru.
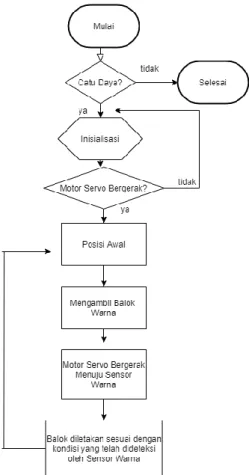
Analisa Secara Diagram Alur (Flowchart)
Gambar 10 Diagram Alur (Flowchart) Alat
Diagram alur (flowchart) merupakan cara untuk menjelaskan alur kerja program yang berfungsi menentukan input dan output pada alat. Berikut adalah diagram alur (flowchart) alat Prototype Sistem Penyortir Benda Berdasarkan Warna Berbasis Arduino Mega2560:
24
1. Apabila catu daya nya on artinya rangkaian alat sudah menyala melalui aliran daya dari adaptor sebesar 5~12 volt untuk Mikrokontroler ATMEGA2560 (Arduino Mega2560).
2. Jika “ya” motor servo akan bergerak dan pertama-tama dimulai dengan posisi awal, yaitu pada saat servo 90˚, kemudian motor servo dangripper bergerak untuk mengambil benda atau objek yang telah di susun secara acaktersebut.
3. Setelah proses pengambilan benda motor servo dan gripper akan bergerak akan mengarahkan nya persis di depan sensor warna untuk mendeteksi warna benda tersebut dan dalam posisi servo1 berputar 150˚, servo2 berputar 160˚ dan servo3 berputar 0˚.
4. Maka Sensor warna akan aktif untuk membaca warna merah dan akan membuat servo1 berputar 130˚, servo2 berputar 80˚ dan servo3 berputar 110˚.
5. Sensor warna akan aktif untuk membaca warna hijau dan akan membuat servo1 berputar 130˚, servo2 berputar 80˚ dan servo3 berputar 70˚.
6. Sensor warna akan aktif untuk membaca warna biru dan akan membuat servo1 berputar 130˚, servo2 berputar 80˚ dan servo3 berputar 40˚.
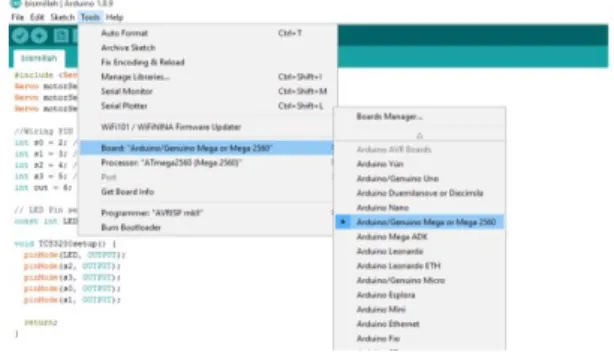
Flash Program pada Mikrokontroler ATmega328 (Arduino Mega)
Berikut cara melakukan flash program pada Mikrokontroler ATMEGA2560(Arduino Mega2560):
Gambar 11 Letak Board Arduino Megapada Arduino IDE
1. Buka Software Arduino IDE yang sudah terinstal pada komputer.
Setelah itu buka kembali menu tools –board ,cari board Arduino Mega 2560. 2. Selanjutnya cari serial port dengan cara menghubungkan komputer dan Arduino
Mega2560, kemudian klik tools pada menu toolbar dan klik serial port.
3. Klik program yang akan di compile ke dalam Mikrokontroler Atmega2560 (Arduino Mega2560)
4. Setelah program berhasil di compile maka saatnya untuk mengupload program ke dalam Mikrokontroler ATmega328 (Arduino Mega2560) dengan cara klik upload. 5. Setelah program berhasil di upload ke dalam Mikrokontroler ATmega328 (Arduino
24
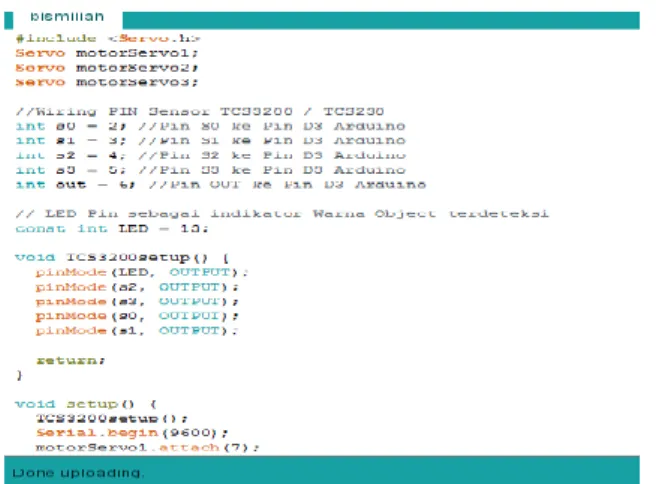
Gambar 12 Program yang Berhasil diUpload Cara Pengoperasian Alat
Berikut cara pengoperasian alat Prototype sistem penyortir benda padat berdasarkan warna berbasis Arduino Mega2560:
a) Sediakan alat yang akan digunakan untuk mengaktifkan prototype sistem penyortir benda padat berdasarkan warna berbasis Arduino Mega2560, seperti adaptor dan Arduino Mega2560 yang telah sukses tercompile dari software Arduino IDE.
b) Siapkan benda berupa kubus berwarna sebagai media atau objek untuk pengambilan data pada alat prototype sistem penyortir benda berdasarkan warna berbasis Arduino Mega2560.
c) Apabila perlengkapan yang diperlukan sudah tersedia semua maka sambungkan adaptor dengan 6,5 volt ke IC regulator. Dan kabel USB untuk disambungkan ke Arduino Mega2560.
d) Setelah alat menyala pastikan Arduino Mega2560 telah terhubung dengan jaringan yang tersedia. Jika salah satu kondisi pada Arduino mega2560 sudah terpenuhi maka akan menghasilkan keluran / output sebagai berikut :
a. Motor servo dan gripper akan bergerak untuk mengambil benda b. Setelah dicapit, langsung mengarah ke posisi depan sensor TCS230
c. Bila sensor telah mendeteksi warna merah maka otomatis motor servo dan gripper akan meletakkan benda tersebut sesuai dengan tempat yang telah ditentukan warna nya.
d. Kemudian servo dan gripper kembali pada posisi awal.
e. Motor servo dan gripper akan bergerak untuk mengambil benda. f. Setelah dicapit, langsung mengarah ke posisi depan sensor TCS230.
g. Bila sensor telah mendeteksi warna hijau maka otomatis motor servo dan gripper akan meletakkan benda tersebut sesuai dengan tempat yang telah ditentukan warna nya.
h. Motor servo dan gripper akan bergerak untuk mengambil benda. i. Setelah dicapit, langsung mengarah ke posisi depan sensor TCS230.
j. Bila sensor telah mendeteksi warna biru maka otomatis motor servo dan gripper akan meletakkan benda tersebut sesuai dengan tempat yang telah ditentukan warna nya
24
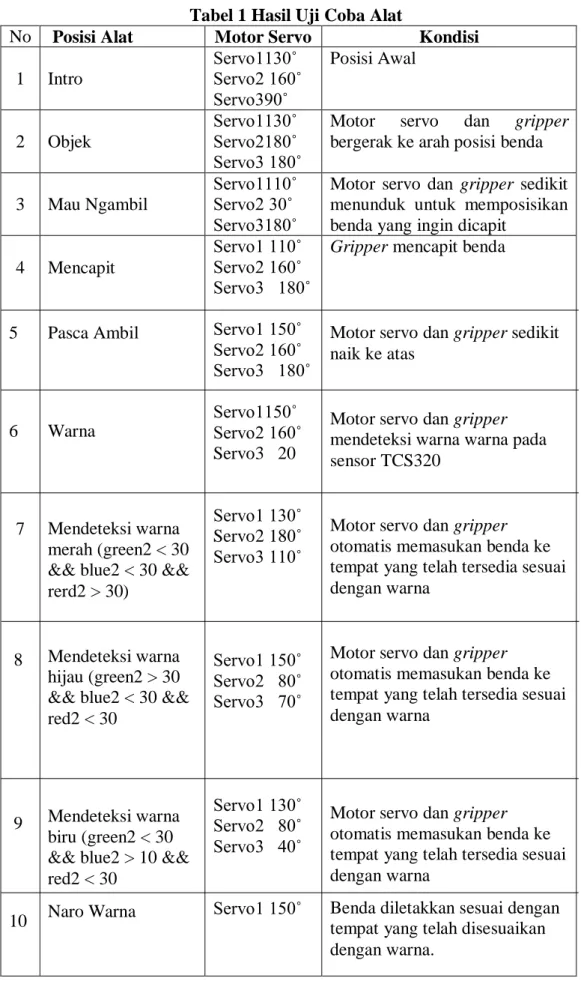
Tabel 1 Hasil Uji Coba Alat
No Posisi Alat Motor Servo Kondisi
1 Intro Servo1130˚ Servo2 160˚ Servo390˚ Posisi Awal 2 Objek Servo1130˚ Servo2180˚ Servo3 180˚
Motor servo dan gripper bergerak ke arah posisi benda
3 Mau Ngambil
Servo1110˚ Servo2 30˚ Servo3180˚
Motor servo dan gripper sedikit menunduk untuk memposisikan benda yang ingin dicapit
4 5 6 7 8 9 10 Mencapit Pasca Ambil Warna Mendeteksi warna merah (green2 < 30 && blue2 < 30 && rerd2 > 30)
Mendeteksi warna hijau (green2 > 30 && blue2 < 30 && red2 < 30
Mendeteksi warna biru (green2 < 30 && blue2 > 10 && red2 < 30 Naro Warna Servo1 110˚ Servo2 160˚ Servo3 180˚ Servo1 150˚ Servo2 160˚ Servo3 180˚ Servo1150˚ Servo2 160˚ Servo3 20 Servo1 130˚ Servo2 180˚ Servo3 110˚ Servo1 150˚ Servo2 80˚ Servo3 70˚ Servo1 130˚ Servo2 80˚ Servo3 40˚ Servo1 150˚
Gripper mencapit benda
Motor servo dan gripper sedikit naik ke atas
Motor servo dan gripper mendeteksi warna warna pada sensor TCS320
Motor servo dan gripper otomatis memasukan benda ke tempat yang telah tersedia sesuai dengan warna
Motor servo dan gripper otomatis memasukan benda ke tempat yang telah tersedia sesuai dengan warna
Motor servo dan gripper otomatis memasukan benda ke tempat yang telah tersedia sesuai dengan warna
Benda diletakkan sesuai dengan tempat yang telah disesuaikan dengan warna.
24
Dari tabel 1 diatas dijelaskan mengenai posisi awal motor servo dan gripper,setelah itu motor servo dan gripper akan bergerak ke arah posisi benda, lalu motor servo dan gripper sedikit menunduk untuk memposisikan benda yang ingin dicapit. Kemudian gripper mencapit benda tersebut, setelah sudah tercapit posisigripper akan sedikit naik ke atas untuk mengarahkan nya ke depan sensor warna TCS320, setelah benda sudah di baca oleh sensor maka benda akan otomatis diletakkan ke tempat yang sudah sesuaikan dengan warna.
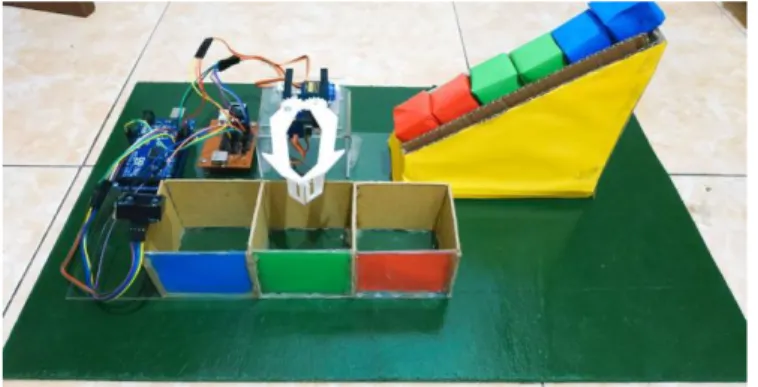
Gambar 13 Alat Prototype Sistem Penyortir Benda Berdasarkan Warna Berbasis Arduino Mega 2560
KESIMPULAN DAN SARAN Kesimpulan
Berdasarkan hasil pengujian alat “Prototype Sistem Penyortir Benda Berdasarkan Warna Berbasis Arduino Mega 2560” yang telah dilakukan bahwa alat sudah dapat bekerja dengan baik sesuai dalam proses pengambilan, mendeteksi, dan peletakan benda sesuai dengan warnanya. Motor servo pada gripper berfungsi dengan baik sebagai actuator dalam mengerjakan proses pengambilan, dan peletakan objek. Jarak jangkauan Sensor TCS230 untuk mendeteksi objek warna dapat mencapai jarak kira-kira 2,5 cm. Pergerakan motor servo pada gripper berjalan secara otomatis sesuai dengan program yang telah dibuat.
Saran
Penelitian ini dapat dikembangkan lagi dengan inovasi terbaru agar alat ini tidak hanya dapat memilah benda padat berupa kotak sesuai warna saja tetapi dapat juga memilah berdasarkan ukuran, tekstur, bau dan masih banyak yang lainnya. Serta dapat juga menambahkan notifikasi & monitoring melalui web / smartphone.
DAFTAR PUSTAKA
[1] Priansa Donni Juni. 2016. Pengembangan Strategi dan Model Pembelajaran Elektronika. Jakarta : Pustaka Setia
[2] Kunto Aji Wibisono. 2018. Sensor dan Aktuator. Jakarta: Abdi Karya [3] Muhtar Lutfi Anshori. 2017. Pengoprasian Motor Servo. Jakarta :
24
[4] Nasution, S. 2003. Berbagai Pendekatan dalam Proses Belajar dan Mengajar. Jakarta: Bumi Aksara
[5] Tirtamihardja. 2009.Aplikasi Elektronika. Jakarta: Erlangga. [6] http://belajarbikinrobot.weebly.com/1-mengenal-apa-itu-robot.html
(Diakses Pada 01 Agustus 2019)
[7] http://eprints.polsri.ac.id/4615/3/FILE%20III.pdf(Diakses Pada 01
Agustus 2019)
[8] https://telka.ee.uinsgd.ac.id/index.php/TELKA/article/view/telka.v4n2.8 5-90. 2018. (Diakses Pada 01 Agustus 2019)
[9] https://repository.usd.ac.id/9914/2/125114013_full.pdf.2017(DiaksesPad a 01 Agustus 2019)
[10]