LAPORAN PRAKTIKUM
LAPORAN PRAKTIKUM
SISTEM KENDALI
SISTEM KENDALI
PENGENALAN MATLAB UNTUK
PENGENALAN MATLAB UNTUK
PERANCANGAN, ANALISIS DAN SIMULASI
PERANCANGAN, ANALISIS DAN SIMULASI
SISTEM KENDALI POSISI
SISTEM KENDALI POSISI
Disusun Oleh :
Disusun Oleh :
Fitri Dwi Fani - 1510631160049
Fitri Dwi Fani - 1510631160049
LABORATORIUM DASAR TEKNIK ELEKTRO
LABORATORIUM DASAR TEKNIK ELEKTRO
FAKULTAS TEKNIK
FAKULTAS TEKNIK
UNIVERSITAS SINGAPERBANGSA KARAWANG
UNIVERSITAS SINGAPERBANGSA KARAWANG
2018
2018
MODUL 3 PENGENALAN M
MODUL 3 PENGENALAN MATLAB UNTUKATLAB UNTUK
PERANCANGAN, ANALISIS DAN SIMULASI SISTEM PERANCANGAN, ANALISIS DAN SIMULASI SISTEM
KENDALI POSISI KENDALI POSISI
Fitri Dwi Fani (1510631160049) Fitri Dwi Fani (1510631160049)
Dosen Pengampu: Mochamad Mardi Marta Dinata, ST., MT. Dosen Pengampu: Mochamad Mardi Marta Dinata, ST., MT.
Tanggal Percobaan: 19/03/2017 Tanggal Percobaan: 19/03/2017 TEL51650-Praktikum Sistem Kendali TEL51650-Praktikum Sistem Kendali Laboratorium Fakultas Teknik
Laboratorium Fakultas Teknik – – Universitas Singaperbangsa Universitas Singaperbangsa Karawang
Karawang
Abstrak
Abstrak
Pada
Pada modul modul 3 3 ini ini akanakan
mempelajari tentang
mempelajari tentang
pengenalan
pengenalan matlab matlab untukuntuk perancangan,
perancangan, analisis analisis dandan simulasi
simulasi sistem sistem kendali poskendali posisi.isi. Percobaan
Percobaan pertama pertama akanakan membuat fungsi transfer dan membuat fungsi transfer dan mencari nilai pole dan zero mencari nilai pole dan zero
nya. Selanjutnya adalah
nya. Selanjutnya adalah
mensimulasikan sistem
mensimulasikan sistem
pengendali
pengendali posisi posisi motor motor DCDC lingkar terbuka dalam waktu lingkar terbuka dalam waktu diskrit dan waktu kontinyu. diskrit dan waktu kontinyu. Terakhir adalah membuat Terakhir adalah membuat
diagram Simulink untuk
diagram Simulink untuk
kontrol PID. Harapan dari kontrol PID. Harapan dari praktikum
praktikum kali kali ini ini adalahadalah praktikan
praktikan mengerti mengerti tentangtentang
alat-alat yang sering
alat-alat yang sering
digunakan khususnya bidang digunakan khususnya bidang elektro yaitu dalam
elektro yaitu dalam praktikumpraktikum
ini adalah menggunakan
ini adalah menggunakan
software
software mathlab. mathlab. Selain Selain ituitu
dapat membuat sebuah
dapat membuat sebuah
rancangan mengenai sistem rancangan mengenai sistem kendali posisi pada waktu kendali posisi pada waktu
diskrit maupun waktu
diskrit maupun waktu
kontinyu serta dapat
kontinyu serta dapat
melakukan analisis pada
melakukan analisis pada
fungsi
fungsi transfer transfer model model yangyang diperoleh.
diperoleh.
Kata kunci: Mathlab, Kendali Kata kunci: Mathlab, Kendali posisi
posisi motor motor DC DC lingkarlingkar
terbuka dan Rancangan
terbuka dan Rancangan
control control PID. PID.
1. PENDAHULUAN
1. PENDAHULUAN
Percobaan modul 3 ini Percobaan modul 3 ini
adalah awalan untuk
adalah awalan untuk
praktikan memah
praktikan memahami konsepami konsep Mengenai pengenalan matlab Mengenai pengenalan matlab untuk perancangan, analisis untuk perancangan, analisis dan simulasi sistem kendali dan simulasi sistem kendali posisi menggunakan software posisi menggunakan software Matlab. Ada pun tujuan Matlab. Ada pun tujuan praktikum adal
praktikum adalahah 1.
1. Mampu Mampu melakukanmelakukan analisis dan simulasi analisis dan simulasi
sistem pengendalian
sistem pengendalian
waktu kontinyu maupun waktu kontinyu maupun diskrit.
2. Memahami konsep kestabilan sistem pengendalian posisi motor DC. 3. Mampu memahami pengaruh periode sampling terhadap
kestabilan sistem pada waktu diskrit.
4. Melakukan perancangan
sistem pengendali PID menggunakan software Matlab
.
5. Melakukan simulasi sistem pengendalian posisi motor DC menggunakan software Matlab.2. STUDI PUSTAKA
2.1Pengendalian Posisi
Berdasarkan fungsitransfer motor yang telah diperoleh dari percobaan pada modul
sebelumnya, maka hubungan antara tegangan input motor Vm dengan posisi sudut
motor Om dalam domain
Laplace sebagaimana
dinyatakan dalam persamaan berikut:
Pada dasarnya terdapat dua jenis sistem pengendalian,
yaitu pengendalian lingkar terbuka dan pengendalian
lingkar tertutup. Pada
pengendalian lingkar terbuka,
keluaran sistem tidak
diumpanbalikkan untuk
dibandingkan dengan sinyal referensi. Hal
ini bisa menimbulkan
kesalahan keadaan tunak. Berikut ini adalah gambar diagram blok
sistem pengendalian lingkar terbuka:
Sedangkanpada pengendalian lingkar tertutup, keluaran
sistem diumpan balikkan
untuk dibandingkan dengan sinyal referensi. Hal ini
bertujuan agar keluaran
sistem bisa diminimalkan. Berikut ini adalah gambar
diagram blok sistem
2.2
Pengendali
PID
Diskrit
Prinsip dari pengendali PID diskrit secara umum sama dengan pengendali PID kontinyu. Berikut ini adalah bentuk pengendali PID diskrit dalam domain z dengan U(z) sebagai sinyal kendali dan E(z) sebagai sinyal eror, yang dalam proses integrasinya
menggunakan metode
forward Euler:
serta tuning parameternya. Lebih dari 95% proses di
industri menggunakan
pengendali ini. Pengendali ini merupakan gabungan dari pengedali proportional (P), integral (I), dan derivative (D). Berikut ini merupakan blok diagram dari sistem pengendali dengan lingkar
tertutup (closed loop):
Keluaran pengendali PID
akan mengubah respon
mengikuti perubahan yang ada pada hasil pengukuran sensor dan set point yang
ditentukan. Pembuat dan
pengembang pengendali PID menggunakan nama yang
berbeda untuk
mengidentifikasi ketiga mode
pada pengendali ini
diantaranya yaitu:
Karakteristik Pengendali
PID
Sebelum membahas
tentang karakteristik
Pengendali PID maka perlu diketahui bentuk
respon keluaran yang akan menjadi target perubahan yaitu :
Pengendali Proposional
Pengendali Proposional
memiliki keluaran yang
sebanding dengan besarnya sinyal kesalahan. Secara lebih sederhana dapat dikatakan, bahwa keluaran Pengendali
Proposional merupakan
perkalian antara konstanta
Proposional dengan
masukannya. Perubahan pada sinyal masukan akan segera menyebabkan sistem secara
langsung mengubah
keluarannya sebesar
konstanta pengalinya.
Gambar berikut menunjukan grafik antara PB, keluaran kontroler dan kesalahan yang
merupakan masukan
controller. Ketika kontanta proporsional
bertambahsemakin tinggoi,
pita proporsional menunjukan
penurunan yang semakin
kecil, sehingga lingkup kerja yang dikuatkan akan semakin sempit.
Ciri-ciri kontroler
proporsional harus
diperhatikan ketika kontroler tersebut diterapkan pada suatu sistem. Secara eksperimen
pengguna kontroler
proporsional harus
memperhatikan
ketentuan-ketentuan berikut ini :
1. jika nilai Kp kecil, kontroler proporsional hanya
bisa melakukan koreksi
kesalahan yang kecil.
Sehingga akan menghasilkan respon yang lambat.
2. jika nilai Kp dinaikkan, respon sistem menunjukan
semakin cepat mencapai
keadaan mantabnya.
Kontroler Integral
Kontroler Integral
berfungsi menghasilkan
respon sistem yang memiliki kesalahan keadaan mantap nol. Kalua sebuah plant tidak memiliki unsur integrator (1/s). kontroler proporsional tidak akan mampu menjamin
keluaran sistem dengan
kesalahan keadaan
mantapnya nol.
Sinyal keluaran
kontroler integral merupakan luas bidang yang dibentuk
oleh kurva kesalahan
penggerak lihat konsep
numerik. Sinyal keluaran akan berharga sama dengan
harga sebelumnya ketika
sinyal kesalahan berharga nol. Gambar berikut menunjukan
sinyal kesalahan yang
disulutkan kedalam Kontroler
Integral dan keluaran
Kontroler Integral terhadap perubahan sinyal kesalahan
Kontroler Diferensial
Keluaran Kontroler
Diferensial memiliki sifat seperti hanya seperti operasi derivatif. Perubahan yang mendadak pada masukan
kontroler, akan
mengakibatkan perubahan
yang sangat besar dan cepat. Gambar berikut menunjukan
blok diagram yang
menggambarkan hubungan
natara sinyal kesalahan
dengan keluaran kontroler.
Gambar dibawah ini
menyatakan hubungan antara sinyal masukan dengan sinyal keluaran kontroler diferensial. Ketika masukannya tidak
mengalami perubahan,
keluaran kontroler juga tidak
mengalami perubahan,
sedangkan apabila sinyal
masukan berubah mendadak
dan menaik, keluaran
menghasilkan sinyal
berbentuk impulse. Jika
sinyal berubah naik secara perlahan, keluarannya justru merupakan fungsi step yang
besar magnitudenya sangat dipengaruhi oleh kecepatan naik dari fungsi ramp dan
factor konstanta
diferensialnya tadi.
Kontroler PID
Setiap kekurangan dan kelebihan dari masing-masing kontroler P, I dan D dapat
saling menutupi dengan
menghasilkan ketiganya
secara parallel menjadi
kontroler proporsional plus
integral plus diferensial.
Elemen-elemen kontroler P, I dan D masing-masing secara
keseluruhan menghasilkan
perubahan awal yang besar. Gambar berikut menunjukan blok diagram kontroler PID.
Sistem pengendali PID
(Proporsional Integral
sistem pengendali yang digunakan secara luas di
berbagai bidang industri.
Pengendali PID terdiri dari 3 komponen pengendali, yaitu proporsional, integral, dan
derivatif.
1. Proporsonal
Dalam domain waktu
kontinyu, hubungan antara sinyal eror B dengan sinyal kontrol u dinyatakan dalam persamaan berikut:
Dari persaamaan (2.1) terlihat
bahwa pengendali
proporsional menghasilkan sinyal kontrol berupa sinyal
eror yang dikalikan
(proporsional) dengan
konstanta proporsonal Kp.
Pengendali proporsional
digunakan untuk
memperbesar penguatan dan mempercepat respon transien. 2. Integral
Dalam pengendali
integral, nilai eror B
diumpankan sebagai laju
perubahan sinyal kontrol u
sebagaimana dinyatakan
dalam persamaan berikut ini: Pengendali integral berfungsi untuk menghilangkan galat atau steady state error
meskipun juga dapat
menyebabkan terjadinya
overshoot dan osilasi yang
mengakibatkan keadaan
tunak lama dicapai. 3. Derivatif
Pengendali derivatif akan
memberikan suatu sinyal
kontrol u yang bersesuaian dengan laju perubahan sinyal
eror B sebagaimana
dinyatakan dalam persamaan berikut ini:
Pengendali ini digunakan untuk mempercepat respon transien meskipun memiliki
kekurangan, yaitu dapat
meningkatkan derau sistem. Sistem pengendali PID bisa
berupa kombinasi antara
proporsional, integral, dan derivatif, bergantung pada
respon sistem yang
diinginkan. Apabila ketiga jenis
pengendali tersebut
digunakan, maka persamaan
yang menyatakan antara
sinyal eror B dengan sinyal
kontrol u dalam domain
waktu kontinyu adalah:
Dalam domain Laplace
dinyatakan sebagai:
Berikut ini adalah diagram blok sistem secara umum
yang menggunakan
pengendali PID:
Keluaran kontroler PID
merupakan jumlahan
kontroler proporsional,
kepuaran kontroler integral.
Gambar dibawah ini
menunjukan hubungan
tersebut.
2.3 Identifikasi Sistem
Estimasi Orde Sistem
Orde atau dikenal dengan derajat suatu sistem dapat diestimasi dari fungsi step
(step response) yang
dipergunakanatau dengan
penggunaan Bode Plot.
Derajat relative suatu sistem yaitu perbedaan antara orde
dari denominator (penyebut) dan orde dari numerator (pembilang) dari fungsi alih
Step Response Jika
respon respon sistem
merupakan non-zero step input akan memiliki slope yang bernilai 0 ketika t=0, sistem harus merupakan orde kedua atau lebih tinggi lagi sebab sistem memiliki derajat relative dua atau lebih. Jika step respon menunjukkan osilasi sistem juga harus menunjukkan orde kedua atau lebih dengan sistem yang underdamped.
Bode Plot – Penggambaran
fasa (phase plot) juga dapat
menjadi indikator untuk
mencari orde yang baik. Jika fasa turun hingga dibawah -90 degrees, sistem merupakan orde kedua atau lebih tinggi.
Derajat relative sistem
memiliki nilai paling kecil atau sama besar dengan bilangan dari perkalian -90 degrees hingga dicapai nilai asymtot pada nilai paling rendah pada penggambaran fasa (phasa plot) sistem.
IDENTIFIKASI
SISTEM DARI STEP
RESPONSE
Dumping Ration – Untuk
kondisi underdamped dari
sistem orde dua, Nilai
dumping ratio dapat dihitung dari persentase overshoot dengan menggunakan rumus
sebagai berikut : ζ =
-ln(%OS/100) /
sqrt(π2+ln2(%OS/100))
dimana %OS merupakan
persentase overshoot, yang
dapat diperkirakan dari
penggambaran nilai off dari step response.
DC Gain - Nilai Penguatan
DC (DC gain) merupakan perbandingan dari kondisi steady state dari step response dengan nilai magnitude dari step input. DC Gain = steady state output / step magnitude
Natural Frequency –
Frekuensi alami (natural
frequency) dari kondisi
underdamped sistem orde dua dapat ditentukan dari nilai damped frekuensi alami yang
dapat diukur dari nilai
penggambaran off step
response dan nilai damping ratio seperti yang telah dihitung diatas. ωn = ωd /
sqrt(1 - ζ2) dimana ωd
merupakan damped frekuensi dalam rad/s yang bernilai 2π/Δt dimana Δt merupakan interval wakti antara dua consecutive peaks dari step response.
IDENTIFIKASI SISTEM DARI BODE PLOT
DC GAIN – Nilai DC
Gain sistem dapat dihitung dari nilai magnitude bode plot ketika s=0. DC Gain = 10M(0)/20 where M(0) is the magnitude of the bode plot when jω=0.
NATURAL FREQUENCY – Frekuensi alami (natural frequency) dari sistem orde dua terjadi ketika fasa dari
respon mencepai sudut
relative -90 terhadap fasa input. ωn = ω90° dimana ω-90° merupakan frekuensi pada saat phase plot di -90
degree.
DAMPING RATIO - Nilai
damping ratio sistem
ditemukan dengan nilai DC Gain dan nilai magnitude dari bode plot ketika fasa plot -90 degrees. ζ = K /
(2*10(M-90°/20)) dimana M-90°
merupakan nilai magnitude bode plot ketika fasa -90
IDENTIFIKASI
PARAMETER SISTEM Jika tipe sistem telah diketahui, parameter khusus sistem dapat ditentukan dari step response atau bode plot. Bentuk umum fungsi alih dari sistem orde satu yaitu : G(s) = b / (s+a) = K / (τs+1).
Sedangkan bentuk umum fungsi alih dari sistem orde dua yaitu : G(s) = a/(s2+bs+c) = Kωn 2 / (s2+2ζωns+ωn 2)
2.4 Software MATLAB
Matlab adalah suatu
bahasa tingkat tinggi untuk
komputasi numerik,
visualisasi dan pemrograman. Matlab bisa digunakan untuk berbagai aplikasi, termasuk
pemrosesan sinyal dan
komunikasi, gambar dan
pemrosesan video, sistem kontrol, uji dan pengukuran, keuangan komputasi, dan biologi komputasi. Di dalam Matlab, terdapat suatu tools yang bisa digunakan untuk
simulasi, yaitu Simulink.
Simulink menyediakan fungsi - fungsi yang diprogram
secara grafik untuk
melakukan simulasi berbagai sistem.
Simulink
Perangkat lunak
SIMULINK dikembangkan
oleh MATHWORK, untuk
melakukan modelling,
simulasi, dan analisis
dinamika sistem proses.
Dengan demikian sangat
bermanfaat dalam
perancangan kendali dan
pemrosesan sinyal, baik
dalam bentuk kontinyu
maupun digital. Didalam
folder MATLAB, Simulink
menempati satu directory
tersendiri, terlepas dari
directory “TOOLBOX”,
sehingga diperlukan
perhatian tersendiri saat
menginstal paket program
MATLAB. Penyajian
“statement” dalam bentuk
diagram blok, yang
berinteraksi dengan function, mfile dalam MATLAB, juga dapat berinteraksi perangkat
luar dengan pemrogram
dalam bahasa C maupun fortran. Blok-blok statement dikelompokkan pustaka blok diagram (“Simulink Library
Browser”). Setiap Blok
Statement dilengkapi dengan minimal salah satu jalur I/O
(“port input/output”),
digunakan sebagai perangkat
antarmuka dengan blok
statement yang lain. Adapun parameter blok statement dapat diubah-ubah sesuai
dengan kebutuhan saat melakukan simulasi. Semua kemudahan tersebut sangat didukung dengan sistem GUI (graphic user interface) yang ada dalam paket program MATLAB. Untuk mengawali
penggunaan SIMULINK,
program MATLAB dijalankan
terlebih dahulu, setelah
muncul prompt pada
“COMMAND WINDOW”,
tekan icon simulink pada
toolbar MATLAB (lihat
Gambar berikut)
Atau tulis “simulink” di
prompt MATLAB pada
Command Window, seperti terlihat pada gambar berikut.
Beberapa saat kemudian akan muncul window “Simulink Library Browser”, seperti pada gambar berikut.
Simulink merupakan bagian dari Matlab yang memiliki
fasilitas untuk
mensimulasikan sistem
kendali tanpa harus
menuliskan program terlebih dahulu, tetapi dengan cara
menyusun blok-blok yg
menggambarkan function
dalam Matlab. Dibawah ini bagian sistem terpenting dari blok – blok untuk proses
program pengendali dari
Simulink.
Dari blok – blok diagram diatas masing diklasifikasikan lagi beberapa blok sesuai dengan kegunaannya. Berikut akan diberikan contoh dari masing – masing blok dan
kegunaannya masing –
masing.
Untuk mewewakili input atau masukan
Untuk melihat Sinyal
Untuk mewakili suatu pengendali / controller
Untuk bentu suatu sistem atau Plant
3. METODOLOGI
3.1 MENCARI POLE DAN ZERO 3.2 PENENTUAN FUNGSI TRANSFER MOTOR DC DISKRIT 3.3 MENCARI RESPON WAKTU KONTINU Setelah mendapatkan fungsi tarnsfer pole(sysd) Zero(sysd) Hasil
Menentukan persamaan mana yang diakan di tentukan fungsi transfernya
Masukan nilai num dan den di matlab. Num untuk nilai pembilang dan zero untuk nilai penyebut
Tuliskan sysd=c2d(s ys,Ts) untuk menentukan fungsi transfer sistem waktu diskrit dari persamaan diatas.
Menentukan
fungsi
transfer dari
persamaan
impulse(sys)
untuk melihat
sinyal impulse
step(sys)untu
k melihat
sinyal step
[u,t]=gensig('sine',t, tf,dt); lsim(sys,u,t) untuk melihat sinyal sinusoidal. [u,t]=gensig(squa re',t,tf,dt); lsim(sys,u,t) untuk melihat sinyal kotak3.4 MENCARI RESPON WAKTU
DISKRIT
3.5 MENCARI ROOT
LOCUS, NYQUIST, DAN BODE PLOT KONTINU
Menentuka
n fungsi
transfer
dari
persamaan
impulse(sysd
) untuk
melihat
sinyal ipulse
step(sysd)un
tuk melihat
sinyal step
[u,t]=gensig('sine', t,tf,dt); lsim(sysd,u,t) untuk melihat sinyal sinusoidal. [u,t]=gensig(squ are',t,tf,dt); lsim(sysd,u,t) untuk melihat sinyal kotak Menentukan fungsi transferdari persamaanrlocus(sys) untuk melihat grafik root locus
nquist(sys) untuk melihat grafik nyquist
bode(sys) untuk melihat grafik bode plot
margin(sys) untuk mencari gain margin dan phase margin
3.6 MENCARI ROOT LOCUS, NYQUIST, DAN BODE PLOT DISKRIT
3.7 PENENTUAN NILAI
PENGUATAN YANG
MEMBUAT SISTEM
MULAI TIDAK STABIL
3.8 MENCARI FUNGSI TRANSFER DAN GRAFIK
RESPON WAKTU DENGAN NILAI PERIODE SAMPLING YANG BERBEDA 3.9 Perancangan Pengendali PID
3.10
Simulasi Sistem Pengendali menggunakan Simulink Menentukan fungsi tarnsfer rlocus(sys) untuk kontinyu rlocus(sysd) untuk diskrit mencari nilai parameter penguatan yang membuat sistem mulai tidak stabil. Menentukan fungsi transfer waktu diskrit sysd=c2d(sys,Ts) masukan tiga nilaisampling yang berbeda melihat pengaruh sampling terhadap kestabilan sistem membuat fungsi transfer pengendali PID melakukan tuning PID otomatis Hasil rangkai kecepatan motor DC Run Hasil Menentukan fungsi transferdari persamaan
rlocus(sysd) untuk melihat grafik root locus
nquist(sysd) untuk melihat grafik nyquist
bode(sysd) untuk melihat grafik bode plot
margin(sysd) untuk mencari gain margin dan phase margin
3.11 Pengendali Kecepatan Motor DC menggunakan Simulink
3.12 Kontrol PID pada
Kecepatan Motor DC
Menggunakan Simulink
4. HASIL DAN ANALISIS
4.1 Percobaan 1 Script
Matlab.
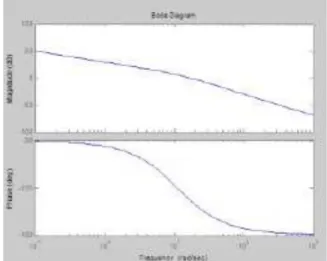
Tugas 1 membuat fungsi transfer motor DC waktu kontinyu.
Gambar Tugas 1
Pada percobaan fungsi
transfer motor DC untuk pengendalian posisi dengan nilai input K=28,9rad/V.s dan
τ
= 0,0909s. maka diperoleh hasil:Persamaan, fungsi transfer =
28,9 0,0909 +
Yang menghasilkan nilai pole = 0 dan -11.0011 dan nilai zero tidak ada.
rangkai pengendali P, PI dan PID masukan parameter Run Hasil rangkai pengendali PID masukan parameter Run Hasil
Tugas 2 mengubah fungsi transfer motor DC ke dalam waktu diskrit.
Gambar Tugas 2
Pada percobaan mengubah fungsi transfer motor DC yang telah dibuat dalam tugas 1 sebelumnya lalu diubah kedalam waktu diskrit dengan nilai T=0,01s maka diperoleh hasil:
Persamaan fungsi transfer =
0,01533 + 0,01478 − 1,896 + 0,8958
Nilai pole 0.8979 dan zero = 0
Tugas 3 membuat plot respon sistem DC lingkar terbuka
Persamaan waktu kontinyu
Gambar Tugas 3 Sinyal Impulse Kontinyu
Terlihat pada gambar impulse respon diatas bahwa sinyal dalam keadaan baik serta tidak terjadi under damp dan diperoleh hasil rise time pada 0.5s sampai menuju steady state eror pada 28.9amplitudo dan sistem tetap stabil.
Gambar Tugas 3 Sinyal Step Kontinyu
Terlihat pada gambar respon sistem terhadap sinyal step diatas konstan naik dan
menunjukan nilai peak
amplitudo > 4.5x10^4 dengan waktu 1500s.
Gambar Tugas 3 Sinyal Sinusioidal Kontinyu
Terlihat pada gambar diatas sinyal sinusoidal memperoleh nilai peak amplitudo pada respon sinus adalah 20 dengan
waktu 2.9s dan peak
amplitudo pada input -1 dengan waktu 8.7s.
Persamaan waktu diskrit
Gambar Tugas 3 impulse diskrit
Pada percobaan diatas dengan inputan t=5s, tf=10 dan dt=0.01. Maka diperoleh hasil respon waktunya seperti pada
gambar diatas, dimana terjadi kenaikan yang sinyal atau
overshoot yang tidak
langsung mengalami
hambatan 0.2s baru sinyal over damp dan mengalami rise time atau stabil pada
waktu 0.52s sebesar
2amplitudo. Apabila kita
menggunakan waktu diskrit maka sinyal outputnya akan seperti gelombang gergaji.
Gambar Tugas 3 step diskrit
Terlihat pada gambar respon sistem terhadap sinyal step diatas konstan naik dan
menunjukan nilai peak
amplitudo > 6.6x10^4 dengan waktu 100s.
Gambar Tugas 3 sinusoidal diskrit
Terdapat 2 buah sinyal, sinyal berwarna biru merupakan
sinyal output sedangkan
berwarna abu-abu sinyal
input/referensinya. Nilai peak amplitudo pada respon sinyal impulse kurang lebih 20 dengan waktu 1.3s sedangkan peak amplitudo pada input -1 dengan waktu 8s. sistem stabil karena pole sistem bernilai negatif.
Tugas 4 plot root locus, Nyquist dan bode plot
Persamaan waktu kontinyu
Gambar Tugas 4 Plot Root Locus Kontinyu
Pada percobaan root locus diatas waktu kontinyu bersifat stabil karena menghasilkan root locus dengan nilai pole- polenya berada disebelah kiri
dan kanan sumbu imajiner.
Gambar Tugas 4 Plot nyquist Kontinyu
Dari hasil percobaan nyquist kontinyu diatas dihasilkan nilai GM = 20.2dB dan nilai PM = 36.4dB.
Dari hasil percobaan bode plot kontinyu diatas diperoleh nilai GM = -0.588dB(at 314rad/s)
dan nilai PM tidak
terdefinisikan.
Persamaan waktu diskrit
Gambar Tugas 4 Plot Root Locus Diskrit
Pada hasil percobaan root locus diatas dapat kita lihat bersifat stabil karena
pole- polenya berada diluar
lingkaran satuan.
Gambar Tugas 4 Plot Nyquist Diskrit
Dari hasil percobaan nyquist kontinyu diatas dihasilkan
nilai GM = 20.2dB dan nilai PM = 36.4dB.
Gambar Tugas 4 Plot bode diksrit
Pada percobaan bode plot diatas dapat kita lihat dan
diperoleh nilai GM =
20.2dB(at 46rad/s) dan PM = 36.4 deg(at 12.8rad/s).
Tugas 5 nilai penguatan sistem mulai tidak stabil
Gambar Tugas 5
Berdasarkan hasil percobaan diatas untuk mencari nilai penguatan sistem mulai tidak
stabil yaitu dengan
menggunakan Root Locus
dan didapatkan hasil
grafik diatas, terlihat menyerupai diperoleh nilai root locusnya -0.5.
Tugas 6 kestabilan sistem dengan periode sampling 100hz, 1000hz dan 10Khz
Gambar Tugas 6 100hz
Berdasarkan pada percobaan diatas dimana kita ingin mencari respon waktu dan
fungsi transfer dengan
menggunakan periode
sampling sebesar 100hz dan didapatkan fungsi transfer dan grafik responnya seperti pada gambar diatas menyerupai
sinyal impulse dan
gelombang gergaji. terjadi
overshoot pada 0.1s sebesar 2
amplitudo dan diperoleh
steady state eror stabil pada
waktu 0.52s sebesar
amplitude = 20.
Gambar Tugas 6 1000hz
Berdasarkan pada percobaan diatas dimana kita ingin mencari respon waktu dan
fungsi transfer dengan
menggunakan periode
sampling sebesar 1000hz dan didapatkan grafik respond an fungsi transfernya seperti pada gambar diatas dimana
overshootnya mulai dari
waktu 0s, peak amplitudo sebesar 18 pada waktu 0.2s dan mengalami steady state eror stabil pada detik ke 0.62s sebesar 20 amplitudo.
Gambar Tugas 6 10khz
Berdasarkan pada percobaan diatas dimana kita ingin mencari respon waktu dan
fungsi transfer dengan
menggunakan periode
sampling sebesar 10khz dan didapatkan grafik respon dan fungsi transfernya seperti pada gambar diatas dimana
overshootnya mulai dari
waktu 0.001s, peak amplitudo sebesar 16 pada waktu 0.15s dan mengalami steady state eror stabil pada detik ke 0.45s sebesar 20 amplitudo.
4.2 Perancangan Pengendali PID
Tugas 7 merancang
pengendali untuk sistem pengendali PI
Gambar tugas 7 waktu kontinyu
Pada hasil percobaan
pengendali sistem PI pada waktu kontinyu. Pada waktu
kontinyu dengan input
settling time kurang dari 0.2s dan overshoot maksimal 15%
maka terjadi overshoot
sebesar 6.5% pada waktu 0.102s nilai peak amplitude sebesar 1.06s dan mengalami akhirnya mengalami settling time tanpa adanya under damp pada waktu 0.211s. Dari perbandingan antara waktu kontinyu dan waktu diskrit dapat kita lihat pada gambar diatas bahwa sinyal lebih cepat mengalami stabil pada waktu kontinyu dibandingkan dengan waktu diskrit.
4.3 Simulasi Sistem Pengendali menggunakan Simulink
Tugas 8 simulasi sistem pengendali posisi motor DC
lingkar terbuka waktu
diskrit
Gambar tugas 8 Ts 0.01s waktu diskrit
Gambar tugas 8 Ts 0.001s waktu diskrit
Gambar tugas 8 Ts 0.0001s waktu diskrit
Pada hasil percobaan posisi motor DC lingkar terbuka waktu diskrit diatas dengan 3
sample periode sampling
yaitu, 0.01s, 0.001s dan 0.0001s. Terlihat dari hasil ketiga output pada masing -masing sinyal gambar diatas terlihat bahwa pada waktu diskrit semakin besar nilai periode samplingnya maka hasil sinyal dihasilkan akan mengalami steady state eror atau stabil semakin cepat
stabilnya. Pada saat
menggunakan nilai input
ts=0.01 sinyal stabil pada waktu 0.56s, 20 amplitudo lebih cepat jika dibandingkan
dengan menggunakan
ts=0.001 stabil pada waktu 0.58s 20 amplitudo.
Tugas 9 simulasi sistem pengendali posisi motor DC lingkar tertutup dengan pengendali PID
Gambar tugas 9 waktu kontinyu
Pada hasil percobaan
pengendali posisi motor DC
lingkar tertutup dengan
pengendali PID dengan waktu diskrit dan waktu kontinyu dapat kita lihat perbedaannya yaitu apabila pada waktu diskrit sinyalnya bergejolak seperti gelombang gergaji dan overshoot pada waktu 0.2s sebesar 0.1 ampllitudo dan stabil pada waktu 0.37s
sedangkan pada waktu
kontinyu sinyal mengalami overshoot pada waktu 0s sebesar 0.2 ampllitudo dan stabil pada waktu 0.348s.
dapat dilihat dari hasil
perbandingan sinyal lebih cepat mengalami steady state eror pada waktu kontinyu.
Tugas 10 simulasi sistem pengendali posisi motor DC lingkar tertutup
Gambar tugas 10 Ts 0.01s
Gambar tugas 10 Ts 0.001s
Gambar tugas 10 Ts 0.0001s
Pada hasil percobaan simulasi
sistem pengendali posisi
motor DC lingkar tertutup dengan nilai Kp=1.75 dan
menggunakan 3 sample
0.001 dan 0.0001 didapatkan hasil sinyal pada grafik diatas.
Jika pada percobaan
menggunakan nilai ts sebesar 0.01s lebih sering naik turun sinyal secara berulang kali sedangkan saat menggunakan nilai ts sebesar 0.001 dan
0.0001s setelah sinyal
overshoot pada waktu 0s sebesar 0.92 amplitudo dan langsung stabil, jika kita lihat pada gambar diatas sinyal lebih cepat stabil pada saat menggunakan nilai ts sebesar 0.0001s pada waktu 0.035s sudah mengalami steady state eror.
Tugas 11 grafik respon open loop hasil ekstraksi linier
Gambar tugas 11 1ekstraksi linier
Pada hasil percobaan open loop ekstraksi linier sinyal yang dihasilkan overshootnya lemah, tidak langsung terjadi
over damp. Nilai peak
amplitude > 1.9x10^4 pada waktu 1500s.
Tugas 12 close loop dengan
lag compensator pada
sistem kontinyu
Gambar tugas 12 lag compensator
Pada hasil percobaan close loop lag compensator pada waktu kontinyu sinyal yang
dihasilkan overshootnya
lemah, tidak langsung terjadi over damp. Sinyal mengalami settling time pada waktu 0.008s.
Tugas 13 membuat simulasi kontrol proporsional
Gambar tugas 13
Ket : warna kuning = 3 Kp,
warna biru muda = 2 Kp, warna merah = 1 Kp, warna
hijau = 0.75 Kp, warna biru = 0.5 Kp.
Pada hasil percobaan simulasi kontrol proporsional dengan menggunakan 5 parameter inputan sample Kp yang berbeda yaitu, 3, 2, 1, 0.75, 0.5. dapat dilihat pada gambar diatas hasil output bentuk sinyal, semakin besar kita
menginput nilai Kp
(Contohnya Kp 3) maka
sinyal keluarannya akan
mengalami overshoot /
overdamp yang besar / tinggi dan setelah itu terjadi osilasi beberapa kali baru sinyal tersebut mengalami settling time pada 0.69s. tetapi apabila kita menginput nilai Kp 0.5 maka sinyal dikatakan stabil tidak terjadi overdamp yang
melebihi sinyal referensi
bahkan langsung mengalami settling time pada 0.64s. dapat disimpulkan bahwa nilai Kp sangat mempengaruhi output sinyal, semakin besar dari nilai 1 maka sinyal akan mengalami overshoot yang sangat tinggi dan melebihi nilai referensi, tetapi apabila semakin kecil dari nilai 1 Kpnya sinyal tersebut tidak akan mengalami osilasi dan dikatakan baik.
Tugas 14 membuat simulasi kontrol PI (NPM)
Gambar tugas 14
Ket : warna kuning = 20 Ki,
Kp = 4.9 (NPM).
Pada percobaan simulasi
control PI menggunakan
parameter Kp NPM yaitu 4.9, sedangkan Ki = 20 serta menggunakan 4 sample nilai Ki. Dapat kita lihat pada gambar diatas hasil percobaan yaitu dari ke 4 sample tersebut
bentuk sinyalnya seperti
gelombang longitudinal
terjadi osilasi beberapa kali baru sinyal tersebut akan stabil. Contohnya apabila kita menginput nilai Ki 20 maka
sinyal tersebut akan
mengalami overshoot yang tinggi sehingga terjadi osilasi
beberapa kali dan
membuatnya menjadi lama
untuk mencapai waktu
stabilnya. Karena pada
percobaan sebelumnya
apabila nilai Kp melebihi dari 1 maka overshoot sinyal akan melebihi sinyal referensi. Oleh sebab itu agar sinyal
disini tidak terlalu besar overshoot/overdampnya
maka disarankan input Ki kurang dari 0.
Tugas 15 membuat simulasi kontrol PD (NPM)
Gambar tugas 15
Ket : warna biru muda = 0.03
Kd,
Kp = 4.9 (NPM).
Pada percobaan simulasi
control PD menggunakan parameter nilai Kp dari NPM yaitu 4.6 dan 5 sample nilai Kd. Dapat ki4a lihat pada gambar diatas dari hasil percobaan bahwa semakin besar nilai Kdnya maka
overshoot sinyal akan
semakin kecil dan cepat untuk mencapai waktu stabilnya,
contohnya pada
menggunakan Kd sebesar 0.1 sinyal lebih cepat stabil jika dibandingkan dengan input nilai Kd lainnya.
Tugas 16 membuat simulasi
kontrol P dengan
pembebanan (NPM)
Gambar tugas 16
Ket : warna kuning = 0 beban,
warna biru muda = 0.001 Kp = 4.9 (NPM)
Pada percobaan simulasi
control P menggunakan
beban. Dapat kita lihat pada gambar diatas bahwa apabila input beban 0 maka sinyal akan lebih cepat mengalami waktu stabilnya walaupun terjadi overshoot yang tinggi dan osilasi beberapa kali karena disebabkan oleh input nilai Kp lebih dari 1. Apabila beban semakin kecil (kurang dari 0) maka overshoot sinyal akan semakin tinggi dan waktu stabil akan lebih lama walaupun tidak terlalu jauh nilainya.
Tugas 17 membuat simulasi
kontrol PD dengan
pembebanan (NPM)
Gambar tugas 17
Ket : warna kuning = 0.001
beban,
Kp dan Kd = 4.9 (NPM)
Pada percobaan simulasi
control PD dengan beban. Dapat kita lihat pada gambar diatas dari hasil percobaan bahwa semakin kecil kita menginput nilai beban maka sinyal tersebut lebih cepat mengalami stabil dan tidak terjadi overshoot yang tinggi
juga contohnya 0.001.
dikarenakan apabila input nilai Kpnya besar dan Kdnya besar atau bahkan sama.
Maka sinyal tersebut
seimbang dan semakin besar beban maka sinyal tersebut
tidak akan mengalami
overshoot yang besar
melewati nilai referensi dan tidak terjadi osilasi.
5. KESIMPULAN
1. Software matlab dapat
mencari fungsi transfer dari semua persamaan, mencari pole dan zero
serta menampilkan
grafik sinyal inpulse, step , sinusoidal dan sinyal kotak. Lalu dapat menampilkan plot Root Locus , Nyquist dan bode plot.
2. Rangkaian motor DC terdiri dari beberapa komponen diantaranya
Vm, ωm, Lm, Im, Rm, Tm dan Vb.
3. Untuk membuat respon
waktu dapat
menggunakan fungsi
transfer waktu diskrit. 4. Pengendali proporsional
mampu mengurangi
nilai steady state eror, dan memperkecil nilai settling time.
5. Pengendali proporsional yang diberikan pada sistem memiliki batas nilai maksimal yang bisa
diberikan untuk
menghasilkan respon
transient terbaik. Jika
melebihi batas
maksimalnya maka akan muncul overshoot dan memperburuk keadaan sistem sinyal.
6. Dalam menentukan
memperhatikan
kombinasi terbaik akan mendapat output yang maksimal. DAFTAR PUSTAKA