Perancangan Awal Robot Ulat Dan Pembuatan Prototipe Dengan
Menggunakan 3D Printer
Aditya Prakoso, Bagus Arthaya, Hanky Fransiscus
Fakultas Teknologi Industri, Jurusan Teknik Industri, Universitas Katolik Parahyangan Jl. Ciumbuleuit 94, Bandung 40141
Email: [email protected], [email protected], [email protected]
Abstrak
Tidak dapat dipungkiri bencana merupakan sesuatu yang sering terjadi di sekitar kita. Salah satu bencana alam yang paling mematikan di seluruh dunia adalah gempa bumi dan tsunami. Pada umumnya korban gempa bumi cedera atau bahkan meninggal akibat tertimpa runtuhnya objek atau bangunan. Proses pencarian korban yang tertimbun bangunan cukup lambat dilakukan karena perlu memindahkan terlebih dahulu objek atau bangunan yang berada di permukaan agar korban dapat ditemukan. Selain itu, tim penyelamat tidak mengetahui posisi korban secara pasti. Padahal korban harus mendapat pertolongan yang cepat agar dapat selamat. Akses dan kondisi lokasi bencana yang berbahaya sering menyebabkan proses pencarian korban menjadi terhambat. Saat ini dengan berkembangnya teknologi, drone mungkin dapat digunakan juga untuk mencari korban bencana. Namun, drone hanya dapat mencari korban yang berada di permukaan saja. Oleh karena itu dibutuhkan suatu alat untuk membantu proses pencarian korban bencana alam di dalam reruntuhan.
Dibuatlah sebuah robot untuk membantu proses pencarian korban bencana alam di dalam reruntuhan. Penelitian diawali dengan menentukan kebutuhan-kebutuhan yang dibutuhkan oleh robot pembantu proses pencarian korban bencana di dalam reruntuhan. Terdapat empat buah kebutuhan utama yang perlu dimiliki robot, yaitu dapat dikendalikan secara wireless, dapat membawa peralatan identifikasi korban seperti kamera dan microphone, berukuran cukup kecil untuk masuk ke dalam reruntuhan dan dapat bergerak cukup fleksibel di dalam reruntuhan. Setelah itu, ditentukan spesifikasi serta mekanisme yang dapat memenuhi kebutuhan-kebutuhan tersebut. Mekanisme yang dianggap memenuhi kebutuhan-kebutuhan tersebut adalah mekanisme pergerakan ulat.
Iterasi desain dilakukan untuk mengadopsi pergerakan ulat menjadi mekanisme pergerakan robot. Iterasi dimulai dengan membuat desain, membuat prototipe dan melakukan evaluasi terhadap desain tersebut. Prototipe dibuat dengan menggunakan teknik rapid prototyping
atau 3D Printing. Iterasi desain dilakukan sebanyak empat kali dan prototipe akhir yang dibuat terdiri dari lima buah modul dengan panjang sekitar 1000 mm, lebar 140 mm dan tinggi 120 mm.
Kata kunci: Robot, Pencarian Korban, Pergerakan Ulat, Prototype, 3D Printing
Pendahuluan
Pada Undang-Undang Republik Indonesia Nomor 24 Tahun 2007 tentang penanggulangan bencana pasal 1 disebutkan bahwa, “bencana alam adalah bencana yang diakibatkan oleh peristiwa atau serangkaian peristiwa yang disebabkan oleh alam antara lain berupa gempa bumi, tsunami, gunung meletus, banjir, kekeringan, angin topan dan tanah longsor.” (Presiden Republik Indonesia, 2007).
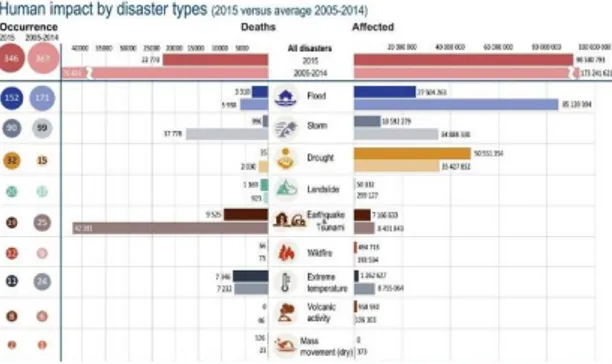
Gambar 1. Jumlah kematian akibat bencana alam di seluruh dunia
Pada Gambar 1 dapat dilihat bahwa gempa bumi dan tsunami merupakan salah satu bencana alam yang paling mematikan di seluruh dunia. Gempa bumi menjadi salah satu yang paling mematikan karena gempa bumi tidak dapat diprediksi dan memiliki dampak area yang cukup besar.
Menurut Antosia dan Cahill (2006), sangat jarang terjadi kematian ataupun cedera yang terjadi akibat efek langsung dari pergerakan tanah. Cedera dan kematian paling banyak terjadi akibat jatuhnya objek ketika orang sedang menyelamatkan diri.
Tindakan penyelamatan korban yang terjebak di dalam reruntuhan tidak mudah dan dapat dilakukan dengan waktu yang cukup lama. Hal tersebut terjadi karena tidak diketahui secara pasti lokasi korban yang membutuhkan bantuan.
Pada proses pencarian korban sekarang umumnya masih mengandalkan teriakan dari korban, perkiraan keberadaan korban dan penciuman anjing. Seiring berjalannya waktu korban akan mengalami kelelahan sehingga tidak mampu lagi berteriak. Akses yang berbahaya juga menyebabkan manusia ataupun anjing tidak diperkenankan memasuki area bencana. Dengan teknologi sekarang,
drone mungkin dapat digunakan untuk membantu proses pencarian. Namun, terbatas pada yang ada di atas permukaan saja. Oleh karena itu diteliti suatu robot untuk membantu proses pencarian korban di dalam reruntuhan. Dalam pembuatan robot terdapat banyak hal yang harus diperhatikan seperti mekanisme pergerakan, algoritma pergerakan, sampai cara komunikasi antar robot. Oleh karena itu, penelitian ini fokus mengenai desain awal robot. Dalam tahap pembuatan prototipe akan digunakan 3D printer. Menurut Stratasys (2009) pembuatan prototipe dengan menggunakan 3D
printer dapat mengurangi lead time sebesar 90%. Dengan menggunakan 3D printer juga dapat dicoba lebih banyak desain, sehingga dapat meningkatkan kemungkinan penemuan desain komponen akhir yang lebih baik (Stratasys, 2010).
Metode Penelitian
Penelitian dimulai dengan identifikasi kebutuhan. Identifikasi kebutuhan dilakukan agar diketahui kebutuhan-kebutuhan atau fungsi yang harus dipenuhi dari produk yang akan dibuat. Terdapat beberapa metode yang umum untuk melakukan identifikasi kebutuhan seperti interview, focus group discussion,
pengamatan langsung, pengamatan tidak langsung, menganalisis dan menginterpretasi data. Pada penelitian ini identifkasi kebutuhan dilakukan dengan melakukan analisis terhadap fenomena-fenomena yang terjadi dalam proses pencarian dan penyelamatan korban.
Identifikasi kebutuhan selanjutnya akan dikembangkan menjadi spesifikasi produk. Spesifikasi merupakan deskripsi dari apa yang produk mampu lakukan. Spesifikasi terdiri dari
metric dan value. Metric merupakan karakteristik dari produk tersebut seperti dimensi, massa dan lain-lain. Sedangkan value
merupakan nilai dari karakteristik tersebut. Pembuatan konsep dilakukan dengan pencarian solusi secara internal dan eksternal. Kemudian ditentukan konsep yang dianggap paling baik untuk memenuhi spesifikasi yang telah ditentukan.
Perancangan prototype dilakukan berdasarkan konsep yang telah ditentukan. Pada perancangan prototipe dilakukan proses iterasi desain agar ditemukan rancangan atau desain yang paling baik. Pada proses iterasi desain dilakukan pembuatan desain, pembuatan prototipe dan evaluasi prototipe.
Hasil dan Pembahasan
Berikut merupakan hasil dan pembahasan yang diperoleh dari hasil penelitian yang dilakukan.
Identifikasi Kebutuhan
Pada tahap identifikasi kebutuhan dilakukan proses identifikasi berdasarkan fenomena yang terjadi. Pada proses pencarian dan penyelamatan korban gempa di Italia pada tanggal 24 Agustus 2016, gempa susulan menyebabkan petugas harus pergi dari titik
penyelamatan. Oleh karena itu, didapatkan suatu kebutuhan bahwa robot harus dapat dikendalikan secara wireless atau nirkabel agar proses pencarian korban tetap dapat dilakukan tanpa membahayakan petugas. (BBC, 2016)
Agar dapat melakukan pencarian korban, maka diperlukan berbagai peralatan seperti,
microphone untuk mendengar teriakan atau pukulan korban, kamera untuk melihat point of view, sensor pernafasan dan lain-lain. Oleh karena itu, kebutuhan kedua yaitu robot harus mampu membawa berbagai peralatan identifikasi korban.
Pada proses pencarian korban sekarang umumnya digunakan alat berat untuk memindahkan puing-puing. Namun, seringkali terhambat akibat kurangnya alat berat ataupun sulitnya akses menuju lokasi. Oleh karena itu, kebutuhan ketiga yaitu dimensi robot harus cukup kecil agar dapat memasuki reruntuhan tanpa perlu memindahkan puing-puing terlebih dahulu.
Agar robot dapat mencari korban di dalam reruntuhan, tentunya robot harus bergerak. Oleh karena itu, robot harus fleksibel dalam bergerak di dalam reruntuhan. Tabel 1 merupakan rekapitulasi kebutuhan untuk robot yang akan diteliti.
Tabel 1. Rekapitulasi Kebutuhan
No Kebutuhan
1
Robot harus dapat dikendalikan secara
wireless atau nirkabel
2
Robot harus mampu membawa peralatan identifikasi
3
Robot harus memiliki dimensi yang cukup kecil
4 Robot harus fleksibel dalam bergerak
Penentuan Spesifikasi
Setelah kebutuhan-kebutuhan diidentifikasi, dilakukan penentuan metric untuk memenuhi kebutuhan-kebutuhan tersebut.
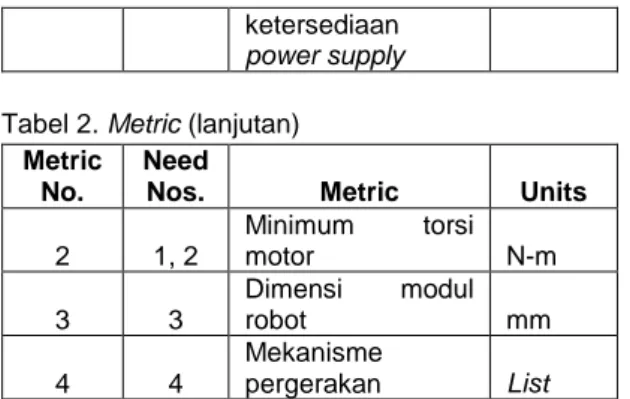
Tabel 2. Metric
Metric No.
Need
Nos. Metric Units
1 1
Komunikasi robot menggunakan
wireless dan Binary
ketersediaan
power supply
Tabel 2. Metric (lanjutan) Metric
No.
Need
Nos. Metric Units
2 1, 2 Minimum torsi motor N-m 3 3 Dimensi modul robot mm 4 4 Mekanisme pergerakan List
Untuk memenuhi kebutuhan pertama yaitu robot harus dapat dikendalikan secara wireless
maka dibutuhkan komunikasi secara wireless
dan ketersediaan power supply pada robot. Unit yang digunakan pada metric ini adalah binary
karena dapat diukur dengan tersedia atau tidaknya komunikasi wireless dan power supply
tersebut.
Untuk memenuhi kebutuhan pertama dan kedua dibutuhkan metric minimum torsi motor yang digunakan. Kebutuhan pertama dan kedua akan menambah beban yang harus dibawa oleh motor. Oleh karena itu, terdapat suatu nilai minimum torsi dari motor yang dihasilkan dan dapat diukur dengan unit N-m.
Untuk memenuhi kebutuhan ketiga yaitu dimensi yang dimiliki cukup kecil maka
metric-nya adalah dimensi modul robot tersebut. Ukuran masing-masing komponen dari modul yang akan dibuat maksimal sebesar 200 x 200 x 200 mm. Ukuran tersebut merupakan ukuran maksimum sebuah objek yang dapat dibuat dengan menggunakan 3D printer XYZ DaVinci 1.0. Selain itu ukuran maksimal tersebut ditentukan agar ukuran modul akhir tidak terlalu besar sehingga dapat memenuhi kebutuhan ketiga.
Untuk memenuhi kebutuhan keempat, mekanisme pergerakan yang dianggap memenuhi adalah mekanisme pergerakan ulat. Menurut Hopkins, Spranklin dan Gupta (2009) binatang tidak berkaki seperti ulat memiliki keunggulan seperti dapat memasuki celah yang kecil, dapat memanjat bebatuan dan permukaan vertikal serta stabil. Oleh karena itu dibuatlah sebuah konsep robot yang mengadopsi mekanisme pergerakan ulat.
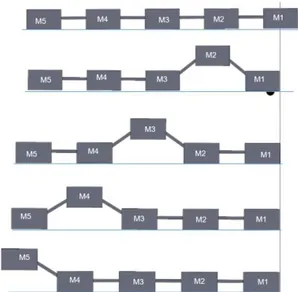
Ilustrasi dari pergerakan ulat tersebut dapat dilihat pada Gambar 2. Pada gambar tersebut dapat dilihat bahwa modul 1 (M1) tidak pernah terangkat. Sehingga pada modul 1 akan dibutuhkan roda untuk membantu pergerakannya. Hal tersebut menyebabkan akan dibuat dua buah kelompok modul yaitu modul belakang dan modul tengah. Modul depan (M5) merupakan modul tengah yang ditaruh secara terbalik.
Gambar 2. Ilustrasi pergerakan robot dari tampak samping
Agar dapat menghasilkan pergerakan seperti pada Gambar 2, maka dibutuhkan beberapa komponen untuk menggerakkan robot tersebut. Komponen tersebut yaitu roda,
microcontroller, motor dan power supply. Roda yang digunakan yaitu roller Tamiya berukuran 13 mm. Microcontroller yang digunakan yaitu Arduino Uno. Pada awalnya motor yang akan digunakan yaitu TowerPro SG90 (dengan torsi sebesar 0,18 N-m) namun diganti menjadi TowerPro MG995 yang menghasilkan torsi lebih besar (1,10 N-m). Serta power supply
yang digunakan adalah baterai dengan tegangan 9 volt.
Gambar 3. Peletakan motor untuk mengungkit modul
Gambar 3 menunjukkan peletakan motor yang akan digunakan untuk mengungkit modul. Motor tersebut akan digunakan untuk mengangkat modul-modul sehingga pergerakan seperti Gambar 2 dapat direalisasikan. Pada modul 1 juga akan terdapat motor yang berfungsi untuk menaik-turunkan roda.
Modul dibuat secara modular atau terbagi menjadi komponen-komponen agar mempermudah proses printing. Bila modul dibuat secara unibody maka dibutuhkan banyak
support dalam pembuatannya. Selain itu, pemasangan rangkaian elektrik seperti motor, baterai dan microcontroller akan menjadi sangat sulit bahkan tidak mungkin dilakukan.
Algoritma Pergerakan
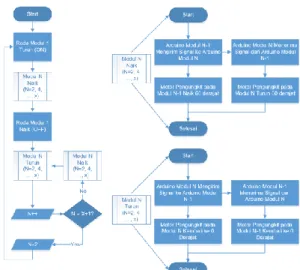
Algoritma pergerakan dibuat berdasarkan pergerakan yang terdapat pada Gambar 2. Pergerakan dimulai dengan menurunkan roda pada modul 1. Kemudian modul 2 akan naik sehingga menyebabkan jarak antara modul 1 dan modul 3 semakin kecil. Hal tersebut akan menyebabkan modul 1 bergerak maju. Pada saat modul 2 berada di atas, roda pada modul 1 akan turun untuk memperbesar gesekan sehingga diharapkan modul 1 tidak akan kembali ke tempat asalnya. Kemudian modul 2 akan turun dan modul 3 akan naik. Hal tersebut diulang sampai modul paling depan sudah turun. Ketika modul paling depan sudah bergerak maka modul tersebut akan mengirimkan signal ke modul pertama atau modul paing belakang untuk memulai kembali siklus gerak robot. Algoritma pergerakan robot yang akan diteliti dapat dilihat pada Gambar 4.
Gambar 4. Algoritma Pergerakan Robot
Pada algoritma di atas terdapat dua buah subproses yang terjadi. Subproses pertama adalah modul N naik dan modul N turun. N merupakan nomor modul yang akan bergerak naik atau turun pada saat tertentu dan x merupakan jumlah modul yang terdapat pada robot. Jumlah modul yang digunakan pada penelitian kali ini adalah 5 buah modul.
Subproses untuk menaikkan modul N adalah modul N-1 mengirimkan signal ke modul N agar modul N siap untuk bergerak naik. Kemudian modul N-1 akan menggerakkan motor pengungkitnya untuk naik 60 derajat. Ketika modul N menerima signal dari modul N-1 maka modul N akan menggerakkan motor pengungkitnya untuk turun sebesar 60 derajat. Hasil pergerakan kedua motor tersebut maka modul N akan terangkat.
Subproses untuk menurunkan modul N adalah modul N mengirimkan signal ke modul N-1 agar modul N-1 siap untuk menurunkan modul N. Kemudian modul N akan menggerakkan motor pengungkitnya untuk kembali ke 0 derajat. Ketika modul N-1 menerima signal dari modul N maka modul N-1 akan menggerakkan motor pengungkitnya untuk kembali ke 0 derajat. Hasil pergerakan kedua motor tersebut maka modul N akan turun.
Pembuatan Desain
Pada proses pembuatan desain ini dilakukan empat buah iterasi hingga didapatkan
hasil prototipe akhir. Pada evaluasi iterasi pertama didapatkan hasil yaitu ketebalan komponen terlalu besar (10 mm) sehingga dilakukan proses iterasi kedua untuk memperkecil ketebalan komponen menjadi 5 mm. Hal ini dilakukan mengingat prototipe yang dibuat akan menggunakan material Acrylonitrile Butadiene Styrene (ABS), dimana ABS merupakan salah satu jenis plastik yang paling kuat sehingga ketebalan 5 mm dianggap cukup. Selain itu, bila dilakukan proses printing dengan ketebalan 10 mm maka waktu proses printing
akan menjadi sangat lama dan menggunakan terlalu banyak material.
Pada evaluasi iterasi kedua diketahui bahwa motor TowerPro SG90 yang digunakan untuk menaik-turunkan roda tidak mampu melakukan tugasnya. Sehingga diganti menjadi motor TowerPro MG995. Kemudian perlu ada bagian yang dipisah dari komponen modul bagian base
karena terdapat bagian yang patah akibat struktur honeycomb menerima gaya dari arah yang tidak tepat. Bagian yang patah tersebut dapat dilihat pada Gambar 5.
Gambar 5. Bagian komponen base patah
Pada desain iterasi ketiga, dibuat tiga buah kelompok komponen penyusun modul yaitu, kelompok khusus untuk modul belakang, kelompok untuk seluruh modul dan kelompok untuk selain modul belakang. Gambar 6 merupakan komponen base untuk modul belakang.
Gambar 6. Komponen base hasil iterasi ketiga
Pada komponen base hasil iterasi ketiga ini, bagian yang patah pada iterasi sebelumnya telah dipisah dari bagian base. Bagian tersebut menjadi komponen tangkai penyangga motor. Gambar 7 merupakan komponen tangkai penyangga motor.
Gambar 6. Komponen tangkai penyangga motor hasil iterasi ketiga
Komponen tangkai penyangga motor ini akan dibuat dengan menggunakan struktur
rectilinear agar tidak akan patah seperti pada iterasi kedua. Sedangkan komponen base akan dibuat dengan menggunakan struktur
honeycomb agar lebih ringan dan menggunakan material yang lebih sedikit.
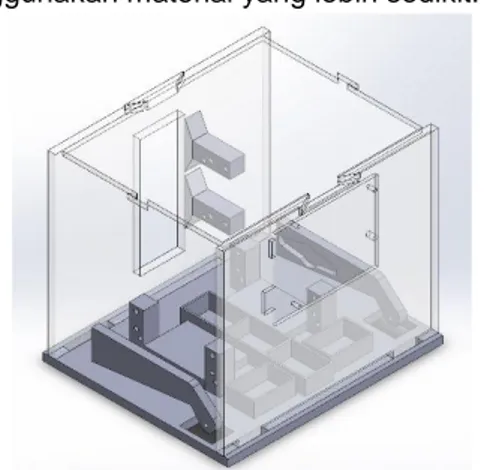
Gambar 7. Hasil assembly modul belakang
Gambar 7 merupakan contoh hasil
assembly untuk modul belakang. Pada modul
belakang akan terdapat microcontroller Arduino Uno, satu buah TowerPro SG90 sebagai motor pengungkit, dua buah TowerPro MG995 sebagai motor untuk menaik-turunkan roda serta lima buah baterai 9 volt sebagai power supply.
Gambar 8 merupakan contoh hasil
assembly untuk modul tengah. Pada modul tengah akan terdapat microcontroller Arduino Uno dan satu buah TowerPro SG90 sebagai motor pengungkit.
Gambar 8. Hasil assembly modul tengah
Modul kemudian di-print dan ditimbang untuk mengetahui massa modul tersebut. Didapatkan massa modul tersebut bersama sebuah arduino uno dan motor TowerPro SG90 adalah sebesar 300 gram. Kemudian dilakukan perhitungan momen yang dibutuhkan untuk mengangkat modul. Perhitungan dilakukan dengan dua skenario. Skenario pertama adalah pengangkatan modul depan dan skenario kedua adalah pengangkatan modul tengah. Berdasarkan perhitungan motor TowerPro SG90 tidak mampu untuk mengangkat modul depannya sehingga akan diganti menjadi motor TowerPro MG995.
Massa motor MG995 memiliki massa 55 gram. Akibat penggantian motor tersebut maka pusat massa modul akan berubah. Gambar 9 menunjukkan pergeseran titik pusat massa modul.
Gambar 9. Titik pusat massa modul dengan motor TowerPro MG995
Dilakukan perhitungan pusat massa baru dengan menggunakan Pers 1.
𝑋 = Σ(𝑚𝑖×𝑥𝑖)
Σ 𝑚𝑖 Pers 1.
𝑋 = 0,055 × 12,5 + 0,291 × 60
0,055 + 0,291 = 52,45
Dimana:
X : Koordinat pusat massa total
mi: massa komponen i xi : koordinat komponen i
Berdasarkan perhitungan diketahui bahwa pusat massa baru berada pada koordinat 52,45. Sehingga dilakukan perhitungan momen yang dibutuhkan untuk mengangkat modul untuk kedua skenario.
Gambar 10. Ilustrasi skenario satu perhitungan momen dengan motor TowerPro MG995
Dilakukan perhitungan momen untuk mengangkat modul sebelah kiri pada gambar. Asumsi percepatan gravitasi sebesar 10 m/s2.
𝑀 = 0,346 𝑘𝑔 × 10𝑚
𝑠2× 0,15245 𝑚
= 0, 5275 𝑁 𝑚
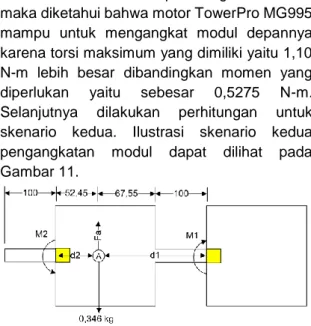
Berdasarkan hasil perhitungan tersebut maka diketahui bahwa motor TowerPro MG995 mampu untuk mengangkat modul depannya karena torsi maksimum yang dimiliki yaitu 1,10 N-m lebih besar dibandingkan momen yang diperlukan yaitu sebesar 0,5275 N-m. Selanjutnya dilakukan perhitungan untuk skenario kedua. Ilustrasi skenario kedua pengangkatan modul dapat dilihat pada Gambar 11.
Gambar 11. Ilustrasi skenario dua perhitungan momen dengan motor TowerPro MG995
Dilakukan perhitungan momen untuk mengangkat modul sebelah kiri pada gambar. Asumsi percepatan gravitasi sebesar 10 m/s2.
𝐹𝑎 > 0,346 𝑘𝑔 × 10𝑚 𝑠2 𝑀2 0,05245+ 𝑀1 0,16755> 3,46 𝑁 0,16755 𝑀 + 0,05245 𝑀 > 0,030406 𝑁 𝑚 𝑀 > 0,138211 𝑁 𝑚 Dimana:
Fa : besar gaya yang dihasilkan M1 dan M2 pada titik A.
M1 : besar momen yang dihasilkan motor 1
M2 : besar momen yang dihasilkan motor 2
M : besar momen yang dibutuhkan
Berdasarkan hasil perhitungan momen yang dihasilkan oleh TowerPro MG995 mampu untuk mengangkat modul tersebut. Oleh karena itu, dilakukan desain iterasi keempat untuk mengganti komponen yang berhubungan langsung dengan motor pengungkit sehingga dapat dipasang dengan baik dengan motor MG995.
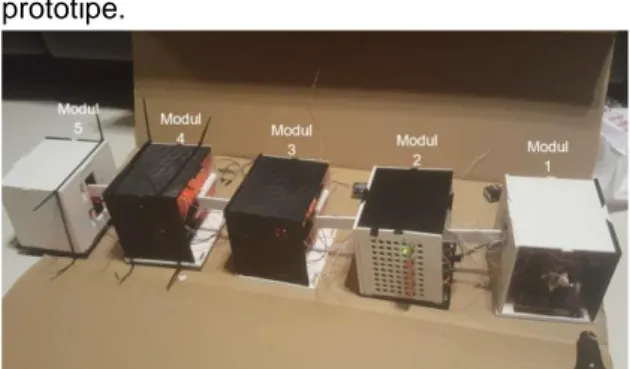
Pengujian Prototipe
Prototipe diuji coba untuk berjalan pada permukaan yang rata. Pada uji coba ini
permukaan tersebut terbuat dari kardus. Gambar 12 merupakan posisi awal pengujian prototipe.
Gambar 12. Posisi awal pengujian prototipe
Prototipe tersebut kemudian dijalankan selama 2 menit. Dalam jangka waktu 2 menit tersebut, prototipe berhasil bergerak maju sejauh 140 mm. Posisi akhir prototipe dapat dilihat pada Gambar 13.
Gambar 15. Posisi akhir pengujian prototipe
Pada pengujian ini terdapat beberapa pergerakan yang sudah sesuai dengan algoritma yang telah ditentukan. Namun terdapat beberapa pergerakan juga yang tidak sesuai, yaitu pergerakan roda pada modul 1 serta pergerakan modul 4 dan modul 5.
Kesimpulan
Desain awal robot ulat untuk membantu proses pencarian korban bencana alam di dalam reruntuhan adalah desain dengan dua buah kelompok modul yaitu modul belakang yang akan memiliki mekanisme untuk menaik-turunkan roda, modul tengah dan modul depan yang merupakan modul tengah yang ditaruh secara terbalik. Desain tersebut mampu digunakan sebagai tempat motor MG995,
microcontroller Arduino Uno dan baterai dengan tegangan 9 volt. Desain tersebut
merupakan hasil desain iterasi ketiga dan keempat.
Desain yang mempertimbangkan teknik 3D
printing dalam proses pembuatannya adalah desain modular dengan lubang yang akan
di-print menghadap arah atas dan bila terdapat lubang dengan ukuran yang berbeda pada sisi berlawanan maka lubang dengan dimensi lebih besar berada di atas.
Saran
Saran yang dapat diberikan bagi penelitian selanjutnya adalah:
1. Dalam pembuatan desain robot, pertimbangkan jalur kabel yang akan digunakan untuk menghubungkan komponen-komponen elektrik.
2. Sebelum melakukan pembuatan objek dengan menggunakan 3D printer sebaiknya kelemahan-kelemahan serta karakteristik
printer diketahui dan dipelajari dengan baik agar dapat dihasilkan desain yang memang sesuai dengan kebutuhan dan dapat dibuat dengan menggunakan mesin 3D printer
tersebut.
3. Berbagai peralatan yang akan dibutuhkan mungkin dapat dicoba untuk dimasukkan ke dalam list komponen agar dapat diletakkan dengan baik dalam robot yang dibuat. 4. Pada bagian bawah robot sebaiknya
terdapat material seperti kulit atau karet atau material lain yang dapat menghasilkan gaya gesek yang cukup besar agar pergerakan robot semakin baik.
Daftar Pustaka
Antosia, R. E. & Cahill, J. D. (2006).
Bioterrorism and Disaster Medicine. New York, USA: Springer.
BBC. (2016, 26 Agustus). Upaya Penyelamatan Korban Gempat Italia Terhambat Gempa Susulan. BBC. Diunduh dari http://www.bbc.com.
Presiden Republik Indonesia. (2007). Undang Undang Republik Indonesia Nomor 24 Tahun 2007 Tentang Penanggulangan Bencana. Diunduh dari
http://www.bnpb.go.id/uploads/migration/pu bs/1.pdf, pada tanggal 25 Agustus 2016. Stratasys. (2009). FDM Helps Bell Helicopter
Build Quality Prototypes. Diunduh dari http://www.stratasys.com/Resources/Case- Studies/Aerospace-FDM-Technology-Case-Studies/Bell-Helicopter.aspx, pada tanggal 19 Agustus 2016.
Stratasys. (2010). FDM reduces tooling costs by 99% and prototyping costs by 73%.
Diunduh dari
http://www.stratasys.com/Resources/Case-
Studies/Consumer-Product-FDM-Technology-Case-Studies/Akaishi.aspx, pada tanggal 19 Agustus 2016.