Analisa Waktu Pemutusan Kritis suatu Sistem Kelistrikan
Teks penuh
Gambar
Dokumen terkait
Kegunaan sistem proteksi tenaga listrik, antara lain untuk; (1) mencegah kerusakan peralatan- peralatan pada sistem tenaga listrik akibat terjadinya gangguan atau kondisi operasi
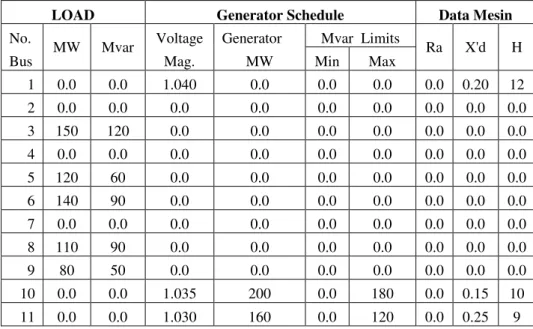
Sistem tenaga listrik merupakan kumpulan peralatan/mesin listrik seperti generator, transformator, saluran transmisi, saluran distribusi dan beban yang merupakan satu
Untuk memproduksi tenaga listrik pada suatu sistem tenaga dibutuhkan cara bagaimana membuat biaya komsumsi bahan bakar generator atau biaya operasi dari keseluruhan
Dengan sistem ini, kebutuhan listrik yang makin meningkat di suatu wilayah dapat ditanggulangi dengan membagi beban dalam beberapa wilayah dengan pembangkit
Stabilitas sistem tenaga listrik adalah kemampuan sistem tenaga listrik untuk kembali stabil ke kondisi awal tertentu, setelah mengalami suatu gangguan. Integritas sistem
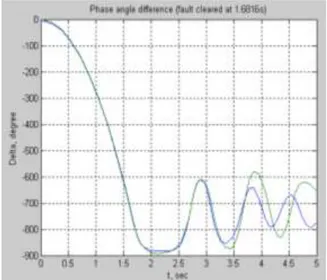
Kestabilan Transien Pada Sistem Tenaga Terjadinya gangguan beban lebih suatu sistem tenaga listrik antara lain adalah akibat adanya pembangkit yang dapat mensuplai
Untuk memproduksi tenaga listrik pada suatu sistem tenaga dibutuhkan cara bagaimana membuat biaya komsumsi bahan bakar generator atau biaya operasi dari keseluruhan
Pembuatan Evaluasi Operasi Bulanan (EOB) ini bertujuan untuk menyediakan informasi mengenai kondisi operasi sistem tenaga listrik Khatulistiwa pada bulan April, termasuk
