4
BAB II
DASAR TEORI
Pada bab ini akan dibahas beberapa teori yang mendukung skripsi. Teori-teori yang digunakan dalam pembuatan skripsi ini terdiri dari kajian pustaka, konsep dasar sistem yang mendukung algoritma robot, mikrokontroler Atmega 128 dan Arduino Mega, sensor yang digunakan (CMUCam5), servo yang digunakan dan aturan pertandingan.
2.1.Kajian Pustaka
a. Penggunaan Kamera CCTV sebagai Sensor Pendeteksi Api pada Robot Pemadam Api [1]
Pada jurnal ini penulis membahas mengenai penggunaan kamera CCTV sebagai sensor pendeteksi api menggantikan UV Tron dan TPA 81. Penggunaan kamera CCTV dinilai lebih baik karena bisa membaca titik api dari jarak cukup jauh, stabil dan tahan terhadap perubahan suhu. Agar kamera dapat digunakan sebagai sensor pendeteksi api maka dilakukan modifikasi dengan menutup led inframerah agar tidak mengganggu output. Selain itu kamera ditutup dengan filter berwarna coklat yang di beri lubang kecil agar mampu membedakan cahaya memantul dengan sumber cahaya.
5
b. Sistem Pengendali Lengan Robot dengan Interfacing Java Berbasis Atmega8535 [2]
Pada jurnal ini penulis membahas mengenai sistem pengendalian lengan robot dengan menggunakan bahasa JAVA. Sistem ini menggunakan sebuah konektor serial yang menghubungkan lengan robot dengan user. Robot dibuat dengan akuator yang berupa motor servo. Motor servo dikendalikan oleh sistem yang menggunakan ATMega8535.
6 2.2.Mikrokontroler Atmega 128
Mikrokontroler merupakan sebuah sistem komputer dalam chip tunggal. Mikrokontroler mempunyai fungsi yang lebih spesifik dibandingkan dengan Personal Computer (PC) [3].
Fasilitas – fasilitas yang dimiliki mikrokontroler Atmega 128 diantaranya: a. Bekerja pada frekuensi clock hingga 16MHz.
b. Memiliki 4 Kbytes EEPROM dan 4 Kbytes Internal SRAM.
c. Terdapat 53 PORT I/O yang dikelompokkan dalam 7 PORT yaitu PORTA, PORTB, PORTC, PORTD, PORTE, PORTF, PORTG.
d. Analog to Digital Converter 10-bit sebanyak 8 channel .
e. Memiliki dua buah timer/counter 8-bit dan dua buah timer/counter 16-bit. f. Delapan bit Pulse Width Modulation(PWM) sebanyak 2 channel.
g. Tersedia antarmuka Two-wire Serial Interface.
h. Memiliki dua buah Universal Synchronous and Asynchronous serial Receiver and Transmiter (USART) yang dapat diprogram.
i. Antarmuka Serial Paralel Interface (SPI) master maupun slave. j. Watchdog Timer yang dapat dirogram.
7
Gambar 2.1. Konfigurasi Pin Atmega128[3]
2.3. Arduino Mega2560
Arduino Mega 2560 adalah mikrokontroler berbasiskan Atmega 2560. Arduino Mega 2560 memiliki 54 pin digital input/output, dimana 15 pin digunakan sebagai output PWM, 16 pin sebagai input analog dan 4 pin sebagai port serial hardware. Arduino mega dilengkapi dengan 16 MHz kristal osilator, koneksi usb, jack power, header ICSP dan tombol reset. Fitur-fitur yang dimiliki oleh arduino mega 2560 adalah sebagai berikut [4]:
a. Kecepatan clock 16 MHz. b. Memori flash sebesar 256 KB. c. 4 KB EEPROM.
d. 8 KB SRAM.
e. Arus DC untuk pin 3.3V 50 mA f. Arus DC per pin I/O 40 mA g. 16 pin I/O analog
h. 54 pin I/O digital (15 pin digunakan sebagai output PWM) i. Input tegangan yang disarankan 7-12 V
8
Gambar 2.2. menunjukkan konfigurasi pin Arduino Mega 2560:
9 2.4.CMUCam5
Cmucam5 disebut juga pixy merupakan image sensor yang memiliki prosesor sendiri sehingga bisa memproses gambar yang dilihat sehingga data yang dikirim sudah berupa data atau informasi yang dibutuhkan. Proses pengiriman data dari pixy dapat dilakukan dengan menggunakan komunikasi UART Serial, SPI, I2C, digital dan analog output. Untuk melakukan komunikasi tersebut pixy dilengkapi dengan 6-10 internal drive cable (IDC). Pixy mampu mengingat 7 warna berbeda sekaligus yang disimpan dalam signature. Selain itu sensor ini juga dapat mendeteksi ratusan benda dalam waktu bersamaan dengan kecepatan 50 fps. Pixy didukung dengan aplikasi open source yang bisa digunakan mac, windows dan linux yang disebut PixyMon.
10 2.5.1. Spesifikasi CMUCam5 atau Pixy[6]:
Prosessor : NXP LPC4330, 204 MHz, dual core Sensor : Omnivision OV975, 1/4", 1280x800 Jangkauan lensa : 75 derajat horizontal, 47 derajat vertikal Tipe lensa : M12
Konsumsi daya : 140 mA
Daya masukan : masukan USB (5V) atau masukan tidak teregulasi (6V sampai 10V)
RAM : 264 K bytes
Flash : 1M bytes
Data keluaran : UART serial, SPI, I2C, USB, digital,
Analog
Dimensi : 5.3cm x 5cm x 3.5 cm
Berat : 27gram
11 2.5.3. Input Warna
Ada dua cara menginput dan menyimpan warna pada Pixy, yang pertama dengan cara memanfaatkan tombol yang terdapat pada board CMUcam5. Jika kita ingin “mengajarkan” warna dengan menggunakan tombol, yang harus dilakukan langkah berikut[7]:
1. Pastikan pixy sudah mendapat daya dan led indikator menyala tunggu sampai led indikator mati.
2. Tekan dan tahan tombol pada pixy, akan ada perubahan warna led indikator dari putih kemudian merah, orange dan lainya. Lepas tombol ketika warna indikator berwarna merah jika kita ingin warna masuk ke signature 1.
3. Ketika tombol di lepas, letakan benda berwarna yang kita inginkan di depan lensa 15 cm sampai 50cm.
4. Perhatikan nyala lampu led indikator, semakin terang led indikator semakin baik pula pixy mengunci warna yang diinginkan.
5. Tekan dan lepaskan tombol untuk menyimpan warna yang telah dikunci.
12
Cara kedua adalah dengan menggunakan aplikasi dari CMUcam5 yaitu PixyMon. Untuk input warna dengan PixyMon ikuti langkah berikut[7]: 1. Pastikan Pixy sudah tersambung menggunakan USB dan tersambung
dengan PixyMon dengan baik.
2. Letakan benda berwarna yang ingin diinput ke Pixy didepan lensa dan pilih Action kemudian Set Signature 1 pada PixyMon.
3. Klik dan drag pada warna diinginkan pada PixyMon.
4. Klik OK, maka warna tersebut akan tersimpat pada signature 1.
Kita dapat pula mengatur luas area dari warna yang kita butuhkan menggunakan PixyMon. Pilih File kemudian Configure kemudian atur sesuai dengan kebutuhan.
2.5.3. Menggunakan Mikrokontroller pada CMUcam5
Jika kita ingin menggunakan mikrokontroller (arduino) pada CMUcam5 hal yang pertama dilakukan adalah menghubungkan port I/O pada CMUcam5 ke port ICSP Arduino dengan menggunakan kabel IDC 6-10. Pixy library untuk arduino dapat di download secara gratis [8].
2.5.3.1. Arduino API
13
getBlocks() mengembalikan nilai dari benda yang tampak.
pixy.blocks[] berisi informasi array dari tiap benda yang tampak.
pixy.blocks[i].signature nomor signature dari benda yang tampak (1-7).
pixy.blocks[i].x lokasi x dari tengah benda yang tampak(0-319).
pixy.blocks[i].y lokasi y dari tengah benda yang
tampak(0-199).
pixy.blocks[i].width lebar dari benda yang tampak(1-320).
pixy.blocks[i].height tinggi dari benda yang tampak(1-200).
pixy.blocks[i].angle sudut dari benda yang tampak
14 2.5.Servo Lengan Penjepit
Lengan penjepit menggunakan 4 buah servo 2 servo pertama (nomor 1 dan 2) terletak dibagian pangkal sebagai penggerak lengan. 2 servo terakhir (nomor 3 dan 4) terletak dibagian ujung lengan yang berfungsi sebagai penggerak penjepit.
Servo yang akan digunakan pada nomor 1 dan 2 lengan penjepit adalah servo HiTec dengan tipe HS-5645MG. Servo ini memiliki spesifikasi sebagai berikut[9]:
Speed(4.8V/6V) : 0.23/0.18 sec @60o Torsi kg/cm(4.8V/6V): 10.3/12.1
Ukuran (mm) : 40.4 x 19.6 x 37.6 Berat (gram) : 59.8
15
Servo yang akan digunakan pada nomor 3 dan 4 lengan penjepit adalah micro servo TowerPro MG90 dengan spesifikasi sebagai berikut[10]:
Speed(4.8V/6V) : 0.11/0.10 sec @60o Torsi kg/cm(4.8V/6V): 2.2/2.5
Ukuran (mm) : 23.1 x 12.2 x 29 Berat (gram) : 14
16 2.6.Aturan Pertandingan
Pada KRPAI 2016 ini, panitia pelaksana memiliki sistem lomba yang berbeda, yaitu terdiri dari 2 level pertandingan. Level 2 seperti KRPAI tahun 2014 berbentuk time trial, sedangkan level 3 berbentuk Search and Rescue. Berikut peraturan dari KRPAI 2016 level 3 yang berlaku mengadopsi pada Trinity College Fire Fighting Home Robot Contes 2016 [11] :
1. Lapangan pertandingan
Lapangan Pertandingan merupakan gabungan dari lapangan level 2 yang dihubungkan dengan lorong penghubung. Lapangan akan mempunyai 2 area yaitu area A dan area B. Pada lorong penghubung akan terdapat ramp dengan kemiringan 15o yang bersifat tidak wajib. Lapangan terbuat dari papan multipleks setebal 2cm. Gambar 2.7 akan menunjukan lapangan pertandingan level 3:
17 2. Safe zone
Safe zone merupakan area aman untuk meletakan boneka bayi pada lapangan lomba. Ada 2 jenis safe zone yaitu primary safe zone dan secondary safe zone.
a. Primary safe zone
Primary safe zone terletak di room pada area A tempat robot pertama start. Robot harus bisa menemukan, mengangkat serta membawa boneka bayi kembali ke start room jika ingin menuju ke primary safe zone.
b. Secondary safe zone
Secondary safe zone akan diposisikan didinding area B yang ditandai dengan kotak berwarna biru berukuran 10cm x 10cm dan ditengahnya terdapat lingkaran merah berdiameter 5cm. Setelah menemukan tanda ini, robot harus mampu meletakan boneka bayi ke jaring penyelamat yang berada dibalik dinding bertanda.Berikut gambar 2.8, tanda dari secondary safe zone:
18
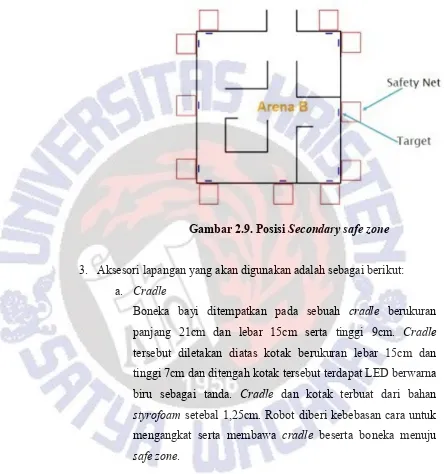
Ada 11 kemungkinan posisi dari secondary safe zone yang terletak di area B. Kemungkinan posisi secondary safe zone akan di tunjukan oleh gambar berikut:
Gambar 2.9. Posisi Secondary safe zone
3. Aksesori lapangan yang akan digunakan adalah sebagai berikut: a. Cradle
19
Gambar 2.10. Cradle dan Boneka Bayi[11, h.55] b. Baby
Boneka bayi yang digunakan adalah boneka bayi berbentuk bayi manusia. Boneka bayi memiliki panjang 16cm dan berat 32gram. Boneka bayi tersebut akan diletakan secara tertidur diatas cradle. Posisi boneka bayi pada cradle akan ditunjukan oleh gambar 2.11 berikut:
20 c. Boneka hewan
Boneka berbentuk boneka anjing atau kucing yang akan menghalangi 50 – 70% lebar lorong. Jika menyentuh boneka tidak ada penalti, tetapi menggeser boneka lebih dari 1 cm akan mendapat penalti. Jika melewati boneka diskualifikasi. Berat boneka 500 gr. Jumlah boneka 1.
d. Karpet
Area A dan area B akan dipasang karpet. Tebal karpet maksimum 10 mm berwarna abu-abu terang. Karpet terpasang tetap di lantai, membentuk pola dan ukuran tertentu. Pola karpet akan ditunjukan dengan gambar 2.12 berikut:
Gambar 2.12. Pola Pemasangan Karpet pada Area [11, h.20]
21 5. Letak Baby Cradle
Setiap ruang mempunyai 2 buah kemungkinan letak baby cradle. Letak dari baby cradle akan ditunjukan oleh gambar berikut:
Gambar 2.13. Letak Baby Cradle dalam Ruang
![Gambar 2.1. Konfigurasi Pin Atmega128[3]](https://thumb-ap.123doks.com/thumbv2/123dok/731522.456302/4.609.102.520.62.473/gambar-konfigurasi-pin-atmega.webp)
![Gambar 2.2. Konfigurasi Pin Arduino Mega2560 [4].](https://thumb-ap.123doks.com/thumbv2/123dok/731522.456302/5.609.102.518.118.613/gambar-konfigurasi-pin-arduino-mega.webp)
![Gambar 2.3. CMUCam5 (Tampak Depan)[5]](https://thumb-ap.123doks.com/thumbv2/123dok/731522.456302/6.609.100.519.251.629/gambar-cmucam-tampak-depan.webp)
![Gambar 2.4. Cmucam5 (Tampak Belakang) [6]](https://thumb-ap.123doks.com/thumbv2/123dok/731522.456302/7.609.103.523.97.629/gambar-cmucam-tampak-belakang.webp)
![Gambar 2.5. Servo HS-5645MG[9]](https://thumb-ap.123doks.com/thumbv2/123dok/731522.456302/11.609.102.516.208.629/gambar-servo-hs-mg.webp)
![Gambar 2.6. TowerPro MG90 –Micro Servo[10]](https://thumb-ap.123doks.com/thumbv2/123dok/731522.456302/12.609.104.518.138.641/gambar-towerpro-mg-micro-servo.webp)
![Gambar 2.7. Arena Pertandingan Level 3[11, h.50]](https://thumb-ap.123doks.com/thumbv2/123dok/731522.456302/13.609.99.544.186.607/gambar-arena-pertandingan-level-h.webp)
![Gambar 2.8. Tanda Secondary safe zone[11, h.34]](https://thumb-ap.123doks.com/thumbv2/123dok/731522.456302/14.609.96.536.129.622/gambar-tanda-secondary-safe-zone-h.webp)
![Gambar 2.10. Cradle dan Boneka Bayi[11, h.55]](https://thumb-ap.123doks.com/thumbv2/123dok/731522.456302/16.609.103.535.100.634/gambar-cradle-dan-boneka-bayi-h.webp)
