SKRIPSI
ELCO FIRDAUS SIAGIAN 140801040
PROGRAM STUDI FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
MICROCONTROLER ARDUINO UNO
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
ELCO FIRDAUS SIAGIAN 140801040
PROGRAM STUDI FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
PERNYATAAN
DC TO DC CONVERTER BERBASIS MICROCONTROLER ARDUINO UNO
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing – masing disebutkan sumbernya.
Medan, Juli 2018
Elco Firdaus Siagian 140801040
PENGHARGAAN
Segala Puji dan Syukur kepada Allah Bapa atas Kasih dan Rahmat-Nya yang senantiasa menyertai penulis sehingga dapat menyelesaikan skripsi ini. Pada kesempatan ini, penulis juga mengucapkan terimakasih terkhusus kepada kedua Orang tua terbaik yang telah mendidik dan membesarkan saya sampai saat ini dan selalu memberikan dukungan moral dan moril serta doa, kepercayaan dan semangat selama ini kepada penulis.Dengan sepenuh hati, penulis juga mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Bapak Dr. Perdinan Sinuhaji, MS, sebagai Ketua Departemen Fisika FMIPA USU.
2. Bapak Drs. Aditia Warman, M.Si Selaku Pembimbing yang telah membantu dan memberikan waktu, saran serta dukungan selama bimbingan.
3. Seluruh Staff Dosen pengajar di Departemen Fisika yang telah memberikan materi selama perkuliahan.
4. Pegawai-pegawai di Departemen Fisika yang telahmembantu dan memberikan petunjuk dan arahan selama perkuliahan.
5. Teman-teman dan para Sahabat Jacky, Martin, Alindra, Nanda, Wilia, Mei, Ibnu, Tono, Dewi, Nia, Mariana, Irma dan yang tidak dapat disebutkan satu- persatu yangtelah menjadi keluarga kedua penulis selama ini.
6. Asisten Lab Teknologi Digital Peter, Berkat, Vivi, Memei, Elyana, Berto, Frans, Esda, Bang Sahat yang telah memberikan masukan serta lelucon yang meringankan beban dalam penulisan skripsi ini.
Penulis menyadari sepenuhnya bahwa dalam penyelesaian skripsi ini masih jauh dari sempurna, untuk itu kritik dan saran yang bersifat membangun sangat diharapkan dari para pembaca.
Medan, Agustus 2018
Elco Firdaus Siagian
DC TO DC CONVERTER BERBASIS MICROCONTROLER ARDUINO UNO
ABSTRAK
Telah dirancang alat dc to dc converter berbasis microcontroler arduino uno Terdiri dari rangkaian buck converter dan rangkaian microcontroler arduino uno yang digunakan sebagai sumber frekuensi dan pengatur feedback. Tegangan masuk dari PLN dan kemudian disearahkan menggunakan full rectifier dan kemudian masuk mosfet yang sudah diberikan frekuensi dari microcontroler arduino uno.
Mosfet berfungsi sebagai switching dengan frekuensi tinggi. Saat mosfet dalam posisi On Inductor akan mengisi muatan dan distabilakn oleh capacitor dan menuju ke sensor tegangan kemudian menuju ke beban. Pada Posisi Off Inductor akan berfungsi sebagai sumber tegangan dan distabilkan oleh capacitor dan menju ke sensor tegangan lalu ke beban .Saat diberikan beban tegangan akan turun, maka sensor akan mendeteksi penurunan tegangan yang selanjutnya dikirim ke microcontroler. Microcontroler akan menabahkan Duty Cycle Frekuensi yang akan diberikan kepada mosfet. Hasil pembacaan Sensor tegangan dan persentase duty cycle juga akan ditampilan dari microcontroler ke LCD sebagai Interface.
Kata kunci : buck converter, duty cycle, mosfet, mikrokontroler ATmega 328
DC TO DC CONVERTER BY USING ARDUINO UNO MICROCONTROLER
ABSTRAC
A dc to dc arduino uno microcontroller based converter has been designed consisting of buck converter circuit and Arduino Uno microcontroller circuit that is used as a frequency source and feedback regulator. The voltage entered from PLN and then it was calculated using the full rectifier and then entered the mosfet which was given the frequency of the Arduino Uno microcontroller. Mosfet functions as switching with high frequency. When the mosfet in the On Inductor position fills the charge and is stabilized by the capacitor and goes to the voltage sensor then goes to the load. At the Off Position the Inductor will function as a voltage source and is stabilized by the capacitor and goes to the voltage sensor and then to the load. When given a voltage load will drop, the sensor will detect a voltage drop which is then sent to the microcontroller. The microcontroller will assign the Duty Cycle Frequency to be given to the mosfet. The reading of the voltage sensor and the percentage of duty cycle will also be displayed from the microcontroller to the LCD as the interface.
Keywords : buck converter, duty cycle, mosfet, ATmega 328 microcontroller,
DAFTAR ISI
Halaman
Persetujuan i
Pernyataan ii
Penghargaan iii
Abstrak iv
Abstract v
Daftar Isi vi
Daftar Tabel ix
Daftar Gambar x
Daftar Lampiran xii
Daftar Singkatan xiii
Bab 1. Pendahuluan
1.1. Latar Belakang 1
1.2. Rumusan Masalah 2
1.3. Batasan Masalah 2
1.4. Tujuan Penelitian 3
1.5. Manfaat Penelitian 3
1.6. Sistematika penulisan 3
Bab 2. Tinjauan Pustaka
2.1 SMPS (Switching Mode Power Supply) 5
2.2 System Buck Converter 5
2.2.1 Prinsip Kerja Buck Converter 6
2.3 PWM (Pulse Width Modulation) 7
2.4 Microcontroler 8
2.4.1 Arduino Uno 9
2.4.2 MikrokontrolerATMega328 10
2.4.3 Konfigurasi pin Mikrokontroler ATmega 328 11
2.4.4. Pengaturan PWM dan Duty Cycle oleh Microcontroler 13
2.5 Liquid Crystal Display (LCD) 14
2.6 Sensor Arus ACS712 15
2.7 MOSFET 16
2.8 Dioda 18
2.9 Optocopler 18
2.9.1 Cara Kerja Optocoupler 19
2.10 Sensor Tegangan 20
2.11 Efisiensi Daya 20
Bab 3. Perancangan Sistem
3.1. Diagram Blok 22
3.1.1 DC DC Converter (BUCK) 23
3.1.2 Rangkaian Regulator 18 V 24
3.1.3 Rangkaian LCD 25
3.1.4 Rangkaian Gate Driver 25
3.1.5 Rangkaian Sensor Arus 26
3.1.6 Rangkaian Sensor Tegangan 27
3.1.7 Arduino 27
3.1.8 Rangkaian Neon Tiruan 29
3.2 Diagram Alir (Flowchart) 30
3.2.1 Flowchart Software 30
Bab 4. Pengujian Alat dan Program
4.1 Pengujian Rangkaian Regulator 18V 31
4.2 Pengujian Rangkaian LCD 31
4.3 Pengujian Sensor Tegangan 33
4.4 Pengujian Sensor Arus 35
4.5 Pengujian Gate Driver 37
4.6 Pengujian Rangkaian Keseluruhan 39
4.6.1 Pengujian Duty Cycle terhadap tegangan 39 4.6.2 Pengujian Efesiensi DC to Dc Converter 40 4.6.3 Pengujian Tegangan dengan Umpan Balik (Feedback)40
Bab 5. Kesimpulan dan Saran
5.1 Kesimpulan 43
5.2 Saran 43
Daftar Pustaka Lampiran
DAFTAR TABEL
Nomor Judul Halaman
Tabel 2.1 Timer Pada Microcontroler 13
Tabel 4.1 Keadan setiap bit untuk tampilan “Elco Firdaus ” 32
Tabel 4.2 Data pengujian sensor tegangan 35
Tabel 4.3 Data pengujian sensor Arus 37
Tabel 4.4 Pengaruh Duty Cycle terhadap Tegangan 39 Tabel 4.5 Data Pengujian Efisiensi DC to DC Converter 40
DAFTAR GAMBAR
Nomor Judul Halaman
2.1. Contoh Rangkaian Switching Mode Power Supply 5
2.2. Rangkaian Buck Converter 6
2.3. Rangkaian Buck pada State On dan State Off 6
2.4. Duty Cycle dan resolusi PWM 8
2.5 Arduino Uno 10
2.6. Konfigurasi Pin ATMega 328M 12
2.7. LCD (Liquid Crystal Display) 14
2.8. Sensor Arus ACS712 16
2.9. MOSFET 17
2.10. Susunan dan symbol diode 18
2.11. Cara Kerja Optocopler 19
2.12. Sensor Tegangan 20
3.1. Diagram blok sistem 23
3.2. Rangkaian DC DC Converter (Buck) 24
3.3. Rangkaian Regulator 18V 24
3.4. Rangkaian LCD 25
3.5. Rangkaian Gate Driver 26
3.6. Rangkaian Sensor Arus 26
3.7. Rangkaian Sensor Tegangan 27
3.8. Rangkaian Arduino 28
3.9 RangkaianLampu Neon tiruan 29
3.10. Flowchart Software 30
4.1. Pengujian rangkaian Regulator 18V 31
4.2. Rangkaian LCD 33
4.3 Pengujian LCD 33
4.4. Rangkaian Sensor Tegangan 34
4.5. Pengujian Sensor Teganggan 35
4.6. Rangkaian Sensor Arus 36
4.7. Pengujian Sensor Arus 37
4.8 Pengujian Gate driver 38
4.9. Pengujian bentuk pulsa Gate Driver dengan Duty Cycle 80% 38 4.10. Pengujian Pengujian Duty Cycle terhadap Tegangan 39 4.11 Pengujian rangkaian keseluruhan dengan beban HPL
(High Power LED) seri dan dengan Feedback 42
DAFTAR LAMPIRAN
Nomor Judul Halaman
1. Listing Program dari Seluruh Sistem 45
2. Rangkaian Lengkap 47
3. Foto Alat 48
4. Datasheet
DAFTAR SINGKATAN
PWM = Pulse Width Modulation AVR = Alf and Vegard’s Risc
RISC = Reduce Instruction Set Computer CISC = Complex Instruction Set Computer ALU = Arithmatic and Logic Unit
SRAM = Static Random Acces Memory
EEPROM = Electrical Erasable Programmable Read Only Memory SPI = Serial Peripheral Interface
USART = Universal Synchronous and Asynchronous serial Receiver and Transmitter
SMPS = Switching Mode Powers Supply SREG = Status Register
CV-AVR = Code Vision-AVR
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Konverter DC-DC adalah suatu alat yang penyedia daya tegangan searah (dc) yang dihasilkan melalui konversi tegangan dc masukan kebentuk tegangan dc keluaran yang lebih rendah atau tinggi. Pada perkembangannya penerapan dc dc converter telah memungkinkan suatu perangkat elektronika dapat berfungsi dengan sumber energi yang berukuran kecil, diamana tegangan keluarannya dapat diubah- ubah sesuai kebutuhan. Hingga saat ini berbagai konfigurasi dc-dc converter telah banyak dikembangkan diantaranya adalah jenis dc-dc converter yang tidak mempunyai isolasi elektrik. Sebuah catu daya DC sederhana dirangkai dengan menurunkan tegangan AC, 50-60 Hz melalui transformator, disearahkan (rectifiying) oleh dioda menjadi denyut/pulsa tegangan. Dan ditapis oleh kapasitor hingga didapat gelombang yang halus minim riak gelombang.
Untuk beban arus kecil catu daya dapat bekerja dengan baik dan efisien, tapi ketika mencatu beban berat, tegangan keluaran akan naik turun bergelombang. Agar halus kembali tegangan perlu distabilkan dengan rangkaian linear.Proses ini menimbulkan panas pada transistor regulator (ini berarti sebuah kerugian daya).
Bersama rugi-rugi pada kawat tembaga dan inti kern trafo, total rugi daya catu daya linear ini menyebabkan hanya mempunyai daya berguna dalam kisaran 30%-40%
saja, selebihnya 60%-70% dibuang dalam bentuk panas.
Pada catu daya DC rating besar, membutuhkan trafo dengan ukuran besar dan bobot yang berat. Karena bekerja pada frekuensi rendah diperlukan kapasitor perata dengan kapasitas besar juga, agar tegangan keluaran tetap halus dan mengurangi drop tegangan pada beban berat. Semakin besar kebutuhan amper, makin besar diameter kawat tembaga, ukuran kern trafo, serta kapasitors yang harus dipasang, dan makin mahal harganya.
Masalahnya tinggi-rendahnya harga tidak selalu menjamin kualitas. Kinerja catu daya konvesnaional hanya baik bila beban sesuai dengan kapasitasnya dan sifatnya
tetap (beban statis). Untuk mencatu beban dinamis (power amplifier misalnya), padanya masih ada drop tegangan, yang makin besar seiring dengan beratnya beban.
Catu daya lebih modern, SMPS (Switch Mode Power Supply) atau sering disebut sistem PWM (Pulse Width Modulator), mengolah tegangan DC dengan penyearahkan AC pada tegangan jala 220 Volt. Tegangan DC volt tinggi ini kemudian disambungkan (switch) ke trafo lewat Transistor Mosfet. Di sisi sekunder tegangan diturunkan lalu disearahkan lagi, dan sebelum diberikan sebagai keluaran, dilewatkan tapis frekuensi tinggi dan kapasitor perata.Mosfet dipekerjakan dengan teknik pensaklaran on / off (switching). Outputnya berupa deretan pulsa hidup-mati secara periodik pada frekuensi yang umumnya antara 1 khz-500 khz.
Meskipun frekuensi tetap , lebar pulsa (durasi) dimodulasi sedemikian rupa, hingga didapat tegangan sesuai yang dikehendaki. Durasi ini selain sebagai penentu besarnya tegangan keluaran, juga digunakan sebagai sirkit penstabil tegangan, melalui rangkaian umpan baliknya. Berdasarkan referensi diatas maka dibuatlah sebuah alat “DC TO DC CONVERTER BERBASIS MICROCONTROLER ARDUINO UNO “ ini untuk dapat memberikan tegangan konstan terhadap beban serta arus dan tegangannya dapat dimonitor dengan menggunakan sensor arus dan tegangan serta pengaturan Duty Cycle sinyal Pulse Width Modulation (PWM) oleh microcontroller Arduino Uno.
1.1 Rumusan Masalah
Rumusan masalah yang dibahas dalam penelitian ini adalah:
1. Bagaimana cara merancang DC to DC converter berbasis atmega 328?
2. Bagaimana cara menghasilkan output sekitar 75 volt pada DC to DC Converter ?
3. Bagaimana cara mendapat nilai tegangan yang stabil dalam kondisi output yang tidak stabil?
1.2 Batasan Masalah
Adapun batasan masalah yang akan dibahas dalam penelitian ini adalah:
1. Penelitian dilakukan dalam bentuk prototype 2. Output yang dihasilakan sekitar 75 volt
3. Pengolahan data dari sensor dan pengatur Duty Cycle PWM menggunakan mikrokontroler Arduino Uno
4. Keluaran ditampilkan pada LCD.
5. Penyearah yang digunakan adalah Dioda tipe Bridge
1.3 Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah:
1. Untuk merancang alat DC to DC converter berbasis Arduino Uno.
2. Untuk menghasilkan output pada DC to DC converter sekitar 75 volt.
3. Untuk mendapatkan nilai tegangan yang stabil dalam kondisi output yang tidak stabil.
1.4 Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah:
1. Membuat lampu neon tiruan dengan daya yang rendah 2. Meningkatkan efisiensi dari penggunaan daya listrik
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematikan pembahasan bagaimana sebenarnya prinsip kerja dari alat DC TO DC CONVERTER BERBASIS MICROCONTROLER ARDUINO UNO Maka penulis menulis skripsi ini dengan sistematika penulisan sebagai berikut:
BAB 1 PENDAHULUAN
Bab ini berisikan pendahuluan yang menjelaskan mengenai latar belakang, perumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian serta sistematika penulisan.
BAB 2 TINJAUAN PUSTAKA
Bab ini menjelaskan tentang teori-teori pendukung dalam penelitian.
Adapun teori pendukung dalam penelitian ini yaitu tentang mikrokontroler
Arduino Uno (hardware dan software), PWM (Pulse Width Modulation), Duty Cycle, Mosfet, Gate Driver.
BAB 3 METODE PENELITIAN
Bab ini membahas tentang perancangan alat, diagram blok, diagram alir, skematik serta sistem kerja dari masing-masing rangkaian.
BAB 4 HASIL DAN ANALISIS
Bab ini berisikan tentang pengujian alat dan juga analisis penelitian yang telah dibuat.
BAB 5 KESIMPULAN DAN SARAN
Bab ini merupakan bab penutup yang berisikan kesimpulan dan saran.
BAB 2
TINJAUAN PUSTAKA
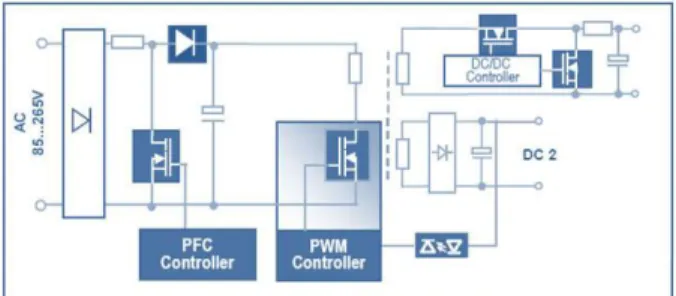
2.1 SMPS (Switching Mode Power Supply)
SMPS adalah jenis power supply yang langsung menyearahkan (Rectify) dan menyaring (Filter) tegangan input AC untuk mendapatkan tegangan DC.Tegangan DC tersebut kemudian di Swich ON dan OFF pada frekuensi tinggi dengan sirkuit frekuensi tinggi sehingga menghasilkan arus AC yang dapat melewati transformator frekuensi tinggi. Keuntungan utama dari metode ini adalah efisiensi yang lebih besar karena switching transistor daya sedikit berkurang ketika berada di luar daerah aktif Keuntungan lain termasuk ukuran yang lebih kecil dan bobot yang lebih ringan dari pengurangan transformator frekuensi rendah yang memiliki berat yang tinggi dan panas yang dihasilkan lebih rendah karena efisiensi yang lebih tinggi. Kerugian meliputi kompleksitas yang lebih besar, generasi amplitudo tinggi, energi frekuensi tinggi yang low-pass filter harus blokuntuk menghindari gangguan elektromagnetik (EMI).SMPS menngunakan Rangkaian DC DC Converter sebagai penurun tegangan.
Rangkain converter DC ke DC ini dilengkapi dengan rangkaian kontrol yang mampu mendeteksitegangan keluaran secara kontinyu dan menetapkan regulasi dengan mengontrol duty cycle saklar yang digunakan.
Gambar 2.1 Contoh Rangkaian Switching Mode Power Supply
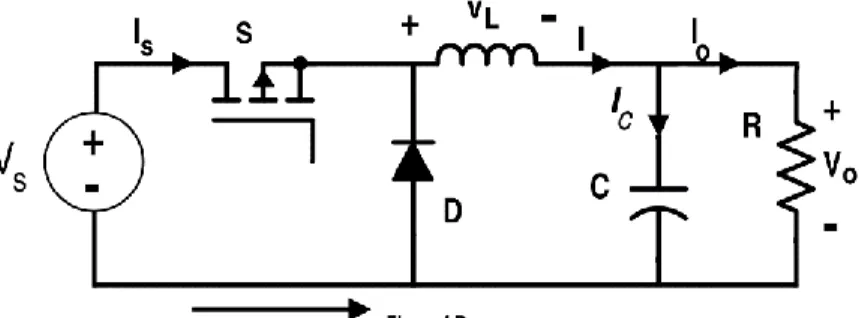
2.2 System Buck Converter
Buck-converter adalah konverter penurun tegangan khusus yang menerapkan sistem SMPS (Switching Mode Power Supply). Ini adalah konverter dengan efisiensi
yang lebih tinggi jika dibandingkan dengan power-supply penurun tegangan biasa (sistem linier). Efisiensinya dapat mencapai lebih dari 90%. Buck-converter memanfaatkan sifat induktor terhadap guncangan listrik berfrekwensi tinggi dan bekerja dengan adanya denyut-denyut tegangan (sebagaimana layaknya SMPS).
Karena itu di dalam sebuah rangkaian buck-converter selalu terdapat generator sinyal, Mosfet, dioda, Capacitor dan induktor.
Gambar 2.2 Rangkaian Buck Converter
2.2.1 Prinsip Kerja Buck Converter
Dalam prinsip kerja buck converter terdapat 2 state, yaitu, state ON dan state OFF. Saat mosfet dalam posisi On Inductor akan mengisi muatan dan distabilakn oleh capacitor dan menuju ke sensor tegangan kemudian menuju ke beban. Pada Posisi Off Inductor akan berfungsi sebagai sumber tegangan dan distabilkan oleh capacitor dan menju ke sensor tegangan lalu ke beban.
Gambar 2.3 Rangkaian Buck pada State On dan State Off
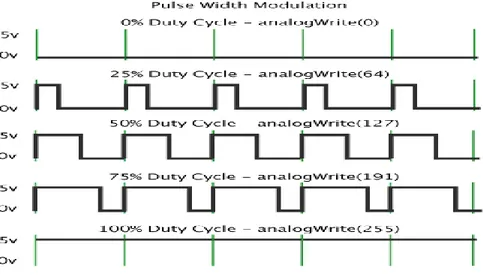
2.3 PWM (Pulse Width Modulation)
Pulse Width Modulation (PWM) secara umum adalah sebuah cara memanipulasi lebar sinyal yang dinyatakan dengan pulsa dalam suatu perioda, untuk mendapatkan tegangan rata-rata yang berbeda. Beberapa Contoh aplikasi PWM adalah pemodulasian data untuk telekomunikasi, pengontrolan daya atau tegangan yang masuk ke beban, regulator tegangan, audio effect dan penguatan, serta aplikasi aplikasi lainnya.Pada metode digital setiap perubahan PWM dipengaruhi oleh resolusi dari PWM itu sendiri. Misalkan PWM digital 8 bit berarti PWM tersebut memiliki resolusi 28= 256, maksudnya nilai keluaran PWM ini memiliki 256 variasi, variasinya mulai dari 0 – 255 yang mewakili duty cycle 0 – 100% dari keluaran PWM tersebut. Keuntungan utama dari PWM adalah bahwa daya yang hilang dalam perangkat switching sangat rendah. PWM juga bekerja dengan baik pada control digital. PWM juga telah digunakan dalam beberapa sistem komunikasi dimana siklus tugasnya telah digunakan untuk menyampaikan informasi melalui saluran komunikasi.
Pulse Width Modulation (PWM) merupakan salah satu teknik untuk mendapatkan signal analog dari sebuah piranti digital. Sebenarnya Sinyal PWM dapat dibangkitkan dengan banyak cara, dapat menggunakan metode analog dengan menggunakan rankaian op-amp atau dengan menggunakan metode digital.Dengan metode analog setiap perubahan PWM-nya sangat halus, sedangkan menggunakan metode digital setiap perubahan PWM dipengaruhi oleh resolusi dari PWM itu sendiri. Resolusi adalah jumlah variasi perubahan nilai dalam PWM tersebut.
Diandaikan suatu PWM memiliki resolusi 8 bit berarti PWM ini memiliki variasi perubahan nilai sebanyak 28 = 256 variasi mulai dari 0 – 255 perubahan nilai yang mewakili duty cycle 0 – 100% dari keluaran PWM tersebut Duty cycle 100% berarti sinyal tegangan pengatur motor dilewatkan seluruhnya. Jika tegangan catu 100V, maka motor akan mendapat tegangan 100V. pada duty cycle 50%, tegangan pada motor hanya akan diberikan 50% dari total tegangan yang ada, begitu seterusnya.
Dengan cara mengatur lebar pulsa “on” dan “off” dalam satu perioda gelombang melalui pemberian besar sinyal referensi output dari suatu PWM akan didapat duty cycle yang diinginkan. Duty cycle dari PWM dapat dinyatakan sebagai
DutyCycle= x 100% (2.1)
Gambar 2.4 Duty Cycle dan resolusi PWM
2.4 Microkontroler
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuahchip.
Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output. Mikrokontroler merupakan keluarga mikroprosesor yaitu sebuah chips yang dapat melakukan pemrosesan data secara digital sesuai dengan perintah bahasa assembly yang diberikan perusahaan pembuatnya. Banyak aplikasi yang dapat dibangun berbasis Mikrokontroler, hal dikarenakan bentuknya yang compaq dan kesederhanaannya untuk membangun suatu sistem berbasis Mikrokontroler.Selain memiliki banyak kelebihan, mikrokontroler juga memiliki kekurangan, diantaranya adalah kurangnya ruang memori data.Bila digunakan untuk aplikasi –aplikasi tertentu yang membutuhkan kapasitas memori yang besar, perlu dilakukan penambahan memori berupa memori eksternal.Salah satu media yang dapat digunakan sabagai media penyimpanan atau memori tambahan adalah Multi Media Card (MMC). Berdasarkan uraian diatas maka perlu dibangun suatu sistem antarmuka yang dapat mengkoneksikan antara mikrokontroler dan MMC sebagai media penyimpanan data.
Mikrokonktroler digunakan dalam produk dan alat yang dikendalikan secara automatis, seperti sistem kontrol mesin, remote controls, mesin kantor, peralatan rumah tangga, alat berat, dan mainan. Dengan mengurangi ukuran, biaya, dankonsumsi tenaga dibandingkan dengan mendesain menggunakan mikroprosesor.
memori, dan alat input output yang terpisah, kehadiran mikrokontroler membuat kontrol elektrik untuk berbagai proses menjadi lebih ekonomis. Dengan penggunaan mikrokontroler ini maka, sistem elektronik akan menjadi lebih ringkas, rancang bangun sistem elektronik akan lebih cepat karena sebagian besar dari sistem adalah perangkat lunak yang mudah dimodifikasi, pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak.
Agar sebuah mikrokontroler dapat berfungsi, maka mikrokontroler tersebut memerlukan komponen eksternal yang kemudian disebut dengan system minimum.
Untuk membuat sistem minimal paling tidak dibutuhkan sistem clock dan reset, walaupun pada beberapa mikrokontroler sudah menyediakan system clock internal, sehingga tanpa rangkaian eksternal pun mikrokontroler sudah beroperasi. Yang dimaksud dengan sistem minimal adalah sebuah rangkaian mikrokontroler yang sudah dapat digunakan untuk menjalankan sebuah aplikasi. Sebuah IC mikrokontroler tidakakan berarti bila hanya berdiri sendiri. Pada dasarnya sebuah sistem minimal mikrokontroler AVR memiliki prinsip yang sama.
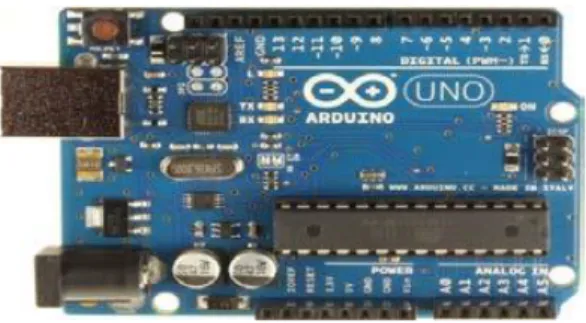
2.4.1 Aduino UNO
Arduino Uno R3 adalah board sistem minimum berbasis mikrokontroller ATmega328P jenis AVR. Arduino Uno R3 memiliki 14 digital input/output (6 diantaranya dapat digunakan untuk PWM output), 6 analog input, 16 MHz osilator kristal, USB connection, power jack, ICSP header dan tombol reset. Skema dari Arduino Uno R3 tampak dari atas dapat dilihat pada Gambar 2.5 dengan karekteristik sebagai berikut:
• Operating voltage 5 VDC.
• Rekomendasi input voltage 7-12 VDC
• Batas input voltage 6-20 VDC.
• Memiliki 14 buah input/output digital.
• Memiliki 6 buah input analog.
• DC Current setiap I/O Pin sebesar 40mA.
• DC Current untuk 3.3V Pin sebesar 50mA.
• Flash memory 32 KB.
• SRAM sebesar 2 KB.
• EEPROM sebesar 1 KB.
• 11 Clock Speed 16 MHz.
Gambar 2.5 Arduino Uno
2.4.2. Mikrokontroler ATMega328
Mikrokontroler ATMega328 merupakan mikrokontroler keluarga AVR 8 bit.
Beberapa tipe mikrokontroler yang sama dengan ATMega8 ini antara lain ATMega8535, ATMega16, ATMega32, ATmega328, yang membedakan antara mikrokontroler antara lain adalah, ukuran memori, banyaknya GPIO (pininput/output), peripherial (USART, timer, counter, dll). Dari segi ukuran fisik, ATMega328 memiliki ukuran fisik lebih kecil dibandingkan dengan beberapa mikrokontroler diatas. Namun untuk segi memori dan periperial lainnya ATMega328 tidak kalah dengan yang lainnya karena ukuran memori dan periperialnya relatif sama dengan ATMega8535, ATMega32, hanya saja jumlahGPIO lebih sedikit dibandingkan mikrokontroler diatas.ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proseseksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer).Secara garis besar, ATMega 328 memiliki beberapa fitur antara lain sebagai berikut:
1. Memiliki 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
2. Memiliki 32 x 8-bit register serba guna.
3. Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
4. Memiliki 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
5. Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory)
sebesar 1KB sebagai tempat penyimpanan data semi permanen karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
6. Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
7. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
8. Master / Slave SPI Serial interface.
Mikrokontroller ATmega 328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapatmemaksimalkan kerja dan parallelism. Instruksi – instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program.Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalam setiap satu siklus clock.32 x 8-bit register serbaguna digunakan untuk mendukung operasi pada ALU (Arithmatic Logic unit) yang dapat dilakukan dalam satu siklus.6 dari register serbaguna ini dapat digunakan sebagai 3 buah register pointer 16-bit pada mode pengalamatan tidak langsung untuk mengambil data pada ruang memori data. Ketiga register pointer 16-bit ini disebut dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31 ). Hampir semua instruksi AVR memiliki format 16-bit.Setiap alamat memori program terdiri dari instruksi 16-bit atau 32-bit.
Selain register serba guna di atas, terdapat register lain yang terpetakan dengan teknik memory mapped I/O selebar 64 byte. Beberapa register ini digunakan untuk fungsi khusus antara lainsebagai register control Timer/ Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsi I/O lainnya. Register - register ini menempati memori pada alamat 0x20h – 0x5Fh.
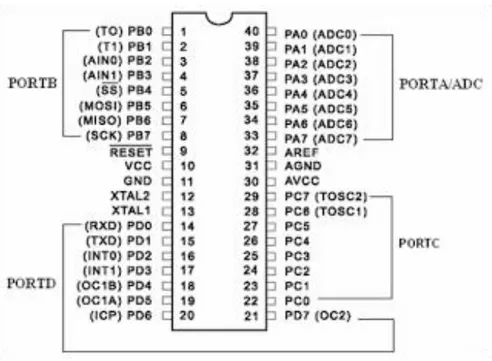
2.4.3. Konfigurasi pin Mikrokontroler ATmega 328
ATMega328 memiliki 3 buah PORT utama yaitu PORTB, PORTC, dan PORTD dengan total pin input/output sebanyak 23 pin. PORT tersebut dapat difungsikan sebagai input/output digital atau difungsikan sebagai peripheral lainnya.
1. Port B
Port B merupakan jalur data 8 bit yang dapat difungsikan sebagai
input/output. Selain itu PORTB juga dapat memiliki fungsi alternatif seperti
di bawah ini.
a. ICP1 (PB0), berfungsi sebagai Timer Counter 1 input capture pin.
b. OC1A (PB1), OC1B (PB2) dan OC2 (PB3) dapat difungsikan sebagai keluaran PWM (Pulse Width Modulation).
c. MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakan jalur komunikasi SPI.
d. Selain itu pin ini juga berfungsi sebagai jalur pemograman serial (ISP).
e. TOSC1 (PB6) dan TOSC2 (PB7) dapat difungsikan sebagai sumber clock external untuk timer.
f. XTAL1 (PB6) dan XTAL2 (PB7) merupakan sumber clock utama mikrokontroler.
Gambar 2.6 Konfigurasi Pin ATMega 328 2. Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebaga input/output digital. Fungsi alternatif PORTC antara lain sebagai berikut.
a. ADC6 channel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10bit.
ADC dapat kita gunakan untuk mengubah input yang berupa tegangananalog menjadi data digital
b. I2C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada
PORTC. I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data tipe I2C seperti sensor kompas, accelerometer nunchuck.
3. Port D
Port D merupakan jalur data 8 bit yang masing-masing pin-nya juga dapatdifungsikan sebagai input/output.
Ada 3 buah timer yang bersedia pada mikrokontroler ATmega328 dan dapat dikonfirgurasikan untuk memenuhi kebutuhan penggunaanya fungsi dan ketiga timer tersebut dapat dilihat pada table berikut:
Tabel 2.1 Timer Pada Microcontroler Atmega 328
Timer Fungsi Pin Output
Timer 0 Waktu delay dengan satuan millisecond
Pengendalian output PWM
Pin 5 dan 6
Timer 1 Pengendalian output PWM Pin 9 dan 10 Timer 2 Pengendalian output PWM Pin 3 dan 11
Dari ketiga timer tersebut, hanya 0 yang dilengkapi dengan ISR (Interrupt Service Rountine) sehingga untuk keperluan PWM (Pulse Width Modulation) menggunakan timer 1 yang akan mengatur pin 9 dan 10 dan sedangakan timer 2 untuk mengatur pin 3 dan 11.
2.4.4. Pengaturan PWM dan Duty Cycle oleh Microcontroler
Pengaturan PWM dilakukan oleh register timer. Terdapat 3 register timer pada microcontroler atmega 328 yaitu Timer0, Timer1 dan Timer2. Timer ini terpasang pada pin yang berbeda sesuai dengan Tabel 2.1. Berikutnya register TCNT0. Register ini digunakan untuk menyimpan counter waktu dari Timer0, dan akan otomatis menghitung apabila register timer diaktifkan. Kemudian Register OCR0 atau Output Compare Register 0, kita dapat mengisinya sesuai kebutuhan.
Dimana sesuai namanya, register ini digunakan sebagai pembanding nilai dari TCNT0. Defaultnya, counter TCNT0 selalu dimulai dari 0. Karena registernya adalah 8-bit. Maka hitungan akan berakhir di nilai 255. Saat itu terjadi counter akan
kembali bernilai 0, menghitung lagi hingga bernilai 255 dan seterusnya. Pada mode normal (non-inverting, lihat gambar 5), nilai TCNT0 akan dibandingkan dengan nilai OCR0. Saat nilai TCNT0 lebih kecil daripada OCR0 maka output dari OC0 adalah aktif HIGH. Sebaliknya, pada saat nilai TCNT0 lebih besar daripada OCR0, maka output OC0 menjadi aktif LOW (Clear on compare match non-inverting).
Nilai state dari OC0 ini lah yang kita manfaatkan sebagai output PWM. Pada ATmega16, OC0 berada pada pin PB3. Disini kita dapat memahami bahwa dengan mengatur nilai OCR0, kita bisa menentukan lebar pulsa atau Duty Cycle dari PWM yang dikeluarkan.
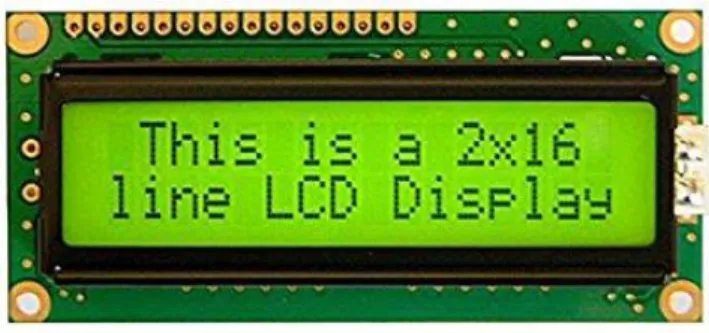
2.5. Liquid Crystal Display (LCD)
LCD merupakan salah satu perangkat penampil yang sekarang ini mulaibanyak digunakan.Penampil LCD mulai dirasakan menggantikan fungsi dari penampil CRT (Cathode Ray Tube), yang sudah berpuluh-puluh tahun digunakan manusia sebagai penampil gambar/text baik monokrom (hitam dan putih), maupun yang berwarna. Beberapa keuntungan LCD dibandingkan dengan CRT adalah konsumsi daya yang relative kecil, lebih ringan, tampilan yang lebih bagus, dan ketika berlama-lama di depan monitor, monitor CRT lebih cepat memberikan kejenuhan pada mata dibandingkan dengan LCD.
Gambar 2.7 LCD (Liquid Crystal Display)
LCD memanfaatkan silicon atau gallium dalam bentuk Kristal cair sebagai pemendar cahaya.Pada layar LCD, setiap matrik adalah susunan dua dimensi piksel yang dibagi dalam baris dan kolom.Dengan demikian, setiap pertemuan baris dan kolom adalah
sebuah LED terdapat sebuah bidang latar (backplane), yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda trasparan. Dalam keadaan normal, cairan yang digunakan memiliki warna cerah.
Daerah-daerah tertentu pada cairan akanberubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pad sisi dalam lempeng kaca bagian depan. Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa micro ampere), sehingga alat atau sistem menjadi portable karena dapat menggunakan catu daya yang kecil. Keunggulan lainnya adalah tampilan yang diperlihatkan dapat dibaca dengan mudah di bawah terang sinar matahari.Di bawah sinar cahaya yang remang-remang dalam kondisi gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan.
2.6 Sensor Arus ACS712
ACS712 adalah sensor arus yang bekerja berdasarkan efek medan. Sensor arus ini dapat digunakan untuk mengukur arus AC atau DC. Modul sensor ini telah dilengkapi dengan rangkaian penguat operasional, sehingga sensitivitas pengukuran arusnya meningkat dan dapat mengukur perubahan arus yang kecil. Sensor ini digunakan pada aplikasi-aplikasi di bidang industri, komersial, maupun komunikasi.
Contoh aplikasinya antara lain untuk senso kontrol motor, deteksi dan manajemen penggunaan daya, sensor untuk catu daya tersaklar, sensor proteksi terhadap arus lebih, dan lain sebagainya.Spesifikasi Sensor Arus ACS712:
1. Berbasis ACS712 dengan fitur:
Waktu kenaikan perubahan luaran = 5 µs.
Lebar frekuensi sampai dengan 80 kHz.
Total kesalahan luaran 1,5% pada suhu kerja TA= 25°C.
Tahanan konduktor internal 1,2 mΏ.
Tegangan isolasi minimum 2,1 kVRMS antara pin1-4 dan pin 5-8.
Sensitivitas luaran 185 mV/A.
Mampu mengukur arus AC atau DC hingga 5 A.
Tegangan luaran proporsional terhadap masukan arus AC atau DC.
2. Tegangan kerja 5 VDC.
3. Dilengkapi dengan penguat operasional untuk menambah sensitivitas luaran.
Gambar 2.8 Sensor Arus ACS712
Sensor ini memiliki pembacaan dengan ketepatan yang tinggi, karena di dalamnya terdapat rangkaian offset rendah linier medan dengan satu lintasan yang terbuat dari tembaga. Cara kerja sensor ini adalah arus yang dibaca mengalir melalui kabel tembaga yang terdapat didalamnya yang menghasilkan medan magnet yang di tangkap oleh IC medan terintegrasi dan diubah menjadi tegangan proporsional.
Ketelitian dalam pembacaan sensor dioptimalkan dengan cara pemasangan komponen yang ada di dalamnya antara penghantar yang menghasilkan medan magnet dengan tranducer medan secara berdekatan. Hambatan dalam penghantar sensor sebesar 1,2 mΩ dengan daya yang rendah. Jalur terminal konduktif secara kelistrikan diisolasi dari sensor timah mengarah (pin 5 sampai pin 8). Hal ini menjadikan sensor arus ACS712 dapat digunakan pada aplikasi-aplikasi yang membutuhkan isolasi listrik tanpa menggunakan opto-isolator atau teknik isolasi lainnya yang mahal. IC ACS712 tipe 5A IC ini mempunyai sensitivitas sebesar 185mV/A. Saat arus yang mengalir 0A IC ini mempunyai output tegangan 2,5V.
Nilai tegangan akan bertambah berbanding lurus dengan nilai arus.
2.7 MOSFET
MOSFET merupakan singkatan dari Metal Oxide Semiconductor FieldEffect Transistor yang merepresentasikan bahan-bahan penyusunnya yang terdiridari
logam, oksida dan semikonduktor (Baskara Internalis, 2007). Terdapat 2jenis MOSFET yaitu tipe NPN atau N channel dan PNP atau biasa disebut Pchannel.
MOSFET dibuat dengan menyusun lapisan oksida pada semikonduktor dari tipe NPN maupun PNP dan lapisan logam diletakkan diatasnya.Biasanya bahan semikonduktor pilihan adalah silikon, namun beberapaprodusen IC, terutama IBM, mulai menggunakan campuran silikon dan germanium (SiGe) sebagai kanal MOSFET. Sayangnya, banyak semikonduktor dengan karakteristik listrik yang lebih baik daripada silikon, seperti galiumarsenid (GaAs), tidak membentuk antarmuka semikonduktor ke isolator yangbaik sehingga tidak cocok untuk MOSFET. Hingga kini terus diadakan penelitian untuk membuat isolator yang dapat diterima dengan baik untuk bahan semikonduktor lainnya. Untuk mengatasi peningkatan konsumsi daya akibatkebocoran arus gerbang, dielektrik κ tinggi menggantikan silikon dioksida sebagai isolator gerbang, dan gerbang logam kembali digunakan untuk menggantikan polisilikon. Gerbang dipisahkan dari kanal oleh lapisan tipisisolator yang secara tradisional adalah silicon dioksida, tetapi yang lebih maju menggunakan teknologi silicon oxynitride. Beberapa perusahaan telah mulaimemperkenalkan kombinasi dielektrik κ tinggi + gerbang logam di teknologi 45 nanometer.
Gambar 2.9 MOSFET
Pada rangkaian ini saya mengguanakan mosfet IRF 740 dengan Vgs yang memadai pada range tegangan 400 volt, IRF740 juga memiliki Rds Yang cukup kecil sehingga memperbesar daya beban yang dapat ditampung oleh rangkaian ini.
2.8 Dioda
Dioda atau diode adalah sambungan bahan p-n yang berfungsi terutama sebagai penyearah. Bahan tipe-p akan menjadi sisi anoda sedangkan bahan tipe-n akan menjadi katoda. Bergantung pada polaritas tegangan yang diberikan kepadanya, dioda bisa berlaku sebagai sebuah saklar tertutup (apabila bagian anoda mendapatkan tegangan positif sedangkan katodanya mendapatkan tegangan negatif) dan berlaku sebagi saklar terbuka (apabila bagian anode mendapatkan tegangan negatif sedangkan katode mendapatkan tegangan positif). Kondisi tersebut terjadi hanya pada diode ideal-konseptual. Pada dioda faktual (riil), perlu tegangan lebih besar dari 0,7V (untuk dioda yang terbuat dari bahan silikon) pada anoda terhadap katoda agar dioda dapat menghantarkan arus listrik. Tegangan sebesar 0,7V ini disebut sebagai tegangan halang (barrier voltage). Dioda yang terbuat dari bahan Germanium memiliki tegangan halang kira-kira 0,3V. (Choirul Anam, 2008)
Gamabr 2.10 Susunan dan symbol diode
2.9 Optocopler
Optocoupler, atau dikenal juga sebagai opto-isolator maupun photocoupler, adalah komponen elektronika yang mentransfer sinyal listrik antara dua bagian (bagian sumber dan bagian penerima) melalui cahaya. Bagian sumber adalah LED (light emitting diode) dan bagian penerima bisa berupa photo-transistor, photo- darlington, photo-SCR, maupun photo-TRIAC. Bagian sumber dan bagian penerima tidak kontak atau terhubung secara fisik, namun sepenuhnya terpisah. Optocoupler melindungi bagian sinyal kuat (tegangan tinggi) untuk memengaruhi sistem di bagian yang menggunakan sinyal rendah (tegangan rendah). Sebagai contoh, ketika kita ingin menyalakan pompa air menggunakan mikrokontroler, kita ingin agar bagian mikrokontroler dan komponen-komponennya tidak dipengaruhi oleh beban (pompa) tersebut. Selain itu, terdapat berbagai penggunaan optocoupler, diantaranya microprocessor input/output switching, PC communications, DC-AC power control, signal isolation, dan sebagainya. Salah satu optocoupler yang paling umum
digunakan adalah gabungan antara LED dan phototransistor, seperti yang terlihat pada Gambar 1. Seperti yang telah kita ketahui bersama, arus kolektor dapat mengalir menuju emiter hanya jika terdapat arus basis. Cahaya pada LED akan jatuh pada area basis sehingga arus basis dapat dibangkitkan. Salah satu parameter yang penting pada optocoupler adalah CTR (Current Transfer Ratio). CTR ini mirip denga HFE atau ss pada transitor. HFE pada transitor umumnya diatas 100, namun CTR sering bernilai kurang dari 1, dan ditulis dalam persen. Misal, CTR 40%, berarti jika input arus adalah 10mA, maka outputnya hanya 4mA. Besarnya nilai CTR tergantung dari penguatan transistor, tegangan suplai ke transistor, serta suhu lingkungan.Ada dua fungsi utama transistor, yaitu sebagai saklar (switch) dan sebagai penguat (amplifier). Saklar identik dengan mode digital, sedangkan penguat identik dengan mode analog. Konsepnya sederhana. Jika menginginkan transistor sebagai saklar, maka buatlah transistor tersebut pada posisi saturasi atau cutoff secara bergantian. Sedangkan sebagai penguat, buatlah berada dikedua daerah tersebut.
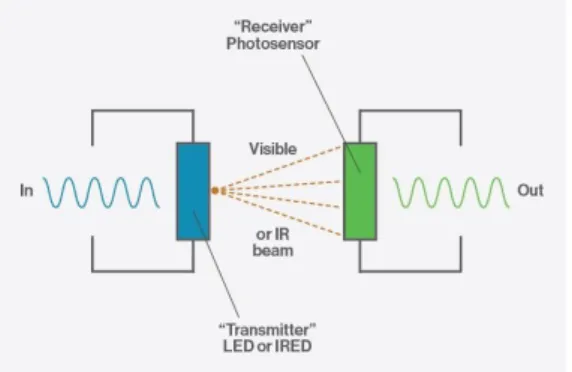
2.9.1 Cara Kerja Optocoupler
Optocoupler merupakan salah satu jenis komponen yang memanfaatkan sinar sebagai pemicu on/off-nya.
Gambar 2.11 Cara Kerja Optocopler
Opto berarti optic dan coupler berarti pemicu. Sehingga bisa diartikan bahwa optocoupler merupakan suatu komponen yang bekerja berdasarkan picu cahaya optic opto-coupler termasuk dalam sensor,
dimana terdiri dari dua bagian yaitu transmitter dan receiver.LED infra merah ini merupakan komponen elektronika yang memancarkan cahaya infra merah dengan konsumsi daya sangat kecil. Jika diberi prasikap maju, LED infra merah yang terdapat pada optocoupler akan mengeluarkan panjang gelombang sekitar 0,9 mikrometer. Phototransistor memiliki sambungan kolektor–basis yang besar dengan cahaya infra merah, karena cahaya ini dapat membangkitkan pasangan lubang elektron. Dengan diberi prasikap maju, cahaya yang masuk akan menimbulkan arus pada kolektor. Phototransistor memiliki bahan utama yaitu germanium atau silikon yang sama dengan bahan pembuat transistor. Tipe phototransistor juga sama dengan transistor pada umumnya yaitu PNP dan NPN. Perbedaan transistor dengan phototransistor hanya terletak pada rumahnya yang memungkinkan cahaya infra merah mengaktifkan daerah basis, sedangkan transistor biasa ditempatkan pada rumah logam yang tertutup.
2.10 Sensor Tegangan
Komponen sensor tegangan adalah 2 buah resistor yang dipasangkan secara seri. Sensor tegangan ini berupa pembagi tegangan. Tegangan yang dihasilkan masih harus berada pada range 0 – 5volt agar dapat terbaca pada pin analog microcontroler.
Gambar 2.12 Sensor Tegangan
2.11 Efisiensi Daya
Daya adalah jumlah energi yang diserap atau dihasilkan dalam sebuah sirkuit/rangkaian. Sumber Energi seperti Tegangan listrik akan menghasilkan daya listrik sedangkan beban yang terhubung dengannya akan menyerap daya listrik tersebut. Dengan kata lain, Daya listrik adalah tingkat konsumsi energi dalam sebuah sirkuit atau rangkaian listrik. Kita mengambil contoh Lampu Pijar dan Heater
(Pemanas), Lampu pijar menyerap daya listrik yang diterimanya dan mengubahnya menjadi cahaya sedangkan Heater mengubah serapan daya listrik tersebut menjadi panas. Semakin tinggi nilai Watt-nya semakin tinggi pula daya listrik yang dikonsumsinya. Dalam rumus perhitungan, Daya Listrik biasanya dilambangkan dengan huruf “P” yang merupakan singkatan dari Power. Sedangkan Satuan Internasional (SI) Daya Listrik adalah Watt yang disingkat dengan W. Watt adalah sama dengan satu joule per detik (Watt = Joule / detik). Dalam penggunaan perlalatan elektronika pasti ditemukan kehilangan daya. Kehilangan daya diakibatkan karena dilepaskan dalam bentuk lain yaitu panas, cahaya dan lain lain. Perbandingan antara daya yang masuk dengan daya yang keluar disebut dengan efisensi daya.
Adapaun persamaan efisensi daya adalah sebagai berikut.
diamana : = Daya output (Watt)
= Daya Input (Watt)
= Efisiensi (%)
BAB 3
PERANCANGAN SISTEM
3.1 Diagram Blok
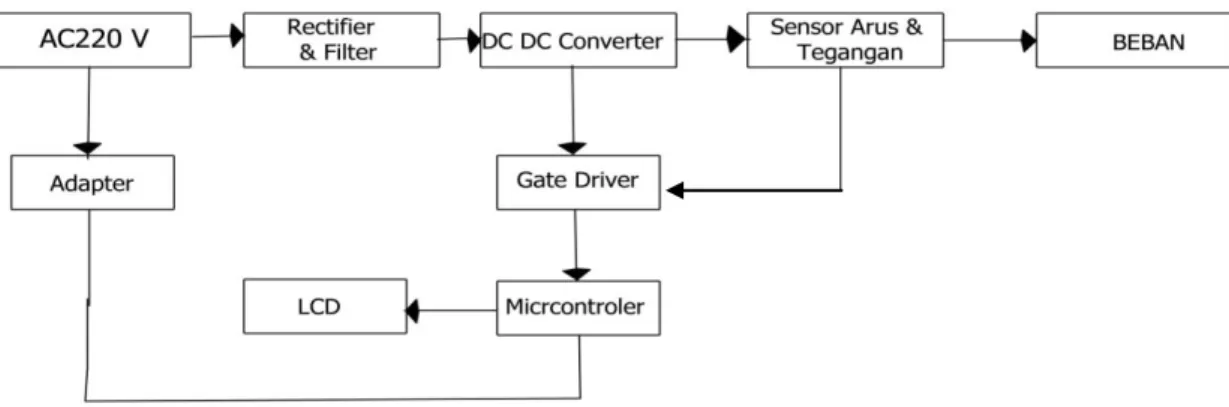
Diagram Blok merupakan dasar dari sistem rangkaian yang menggambarkan sistem kerjanya beserta fungsi-fungsinya. Berikut diagram blok sistem yang telah dirancang pada gambar 3.1 dibawah ini:
Gambar 3.1. Diagram blok sistem
Dapat dijelaskan dalam diagram blok tersebut adalah Tegangan masuk dari jala jala PLN dan kemudian disearahkan melalui diode yang telah diBridge. Hasil tegangan DC yang dihasilkan oleh Dioda bridge kemudian diswitch oleh DC DC converter yang didalammnya tedapat MOSFET. Mosfet akan melakukan switching sesuai frekuensi yang didapatkan dari gate driver. Gate Driver sendiri mendapat inputan sinyal dari Arduino Uno. Arduino akan mengeluarkan Frekuensi sesuai program yang telah diupload. Keluaran dari DC DC Converter berdasarkan DutyCycle yang dikeluarkan oleh Arduino dan Gate Driver. Kemudian Tegangan Hasil Switching akan melewati sensor arus dan tegangan, hasil pembacaan dari sensor arus akan langsung ditampilakn di LCD dan hasil pembacaan dari sensor tegangan akan menjadi feedback penstabil tegangan dengan memvariasikan Duty cycle berdasarkan Output DC DC Converter. Saat tegangan melebihi tegangan yang diinginkan maka akan dilakukan pengurangan duty cycle, dan saat tegangan yang dihasilkan kurang dari tegangan yang diinginkan maka akan dilaukan penambahan duty cycle.
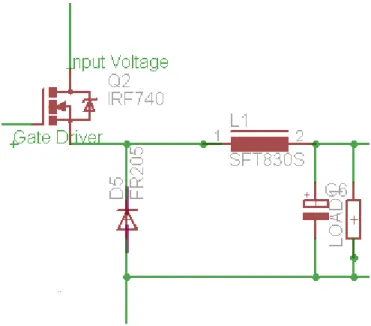
3.1.1 Rangkaian DC DC Converter (BUCK)
Rangkaian Buck Converter terdiri dari Mosfet, Dioda, Inductor, dan capacitor serta Beban. Tegangan Dari Input Voltage akan diswitch berdasarkan Frekuensi yang diterima dari Gate. Dalam proses pensaklaran (Swtiching) tedapat dua kondisi yaitu HIGH dan LOW, saat dalam posisi HIGH maka tegangan akan mengalir ke Inductor dan mengisi arus di inductor lalu distabilkan oleh Capacitor dan selanjutnya akan menuju beban. Saat dalam posisi LOW Inductor Akan berfungsi sebagai sumber arus dan diode akan mengalirkan arus dari Inductor menuju capacitor sebagai penstabil dan menjuke beban.
Komponen penyusun perlu dihitung nilai minimalnya agar DC to DC Converter dapat bekerja sesuai yang diinginkan. Penentuan spesifikasi awal juga dilakukan berdasarkan ketersediaan komponen yang mudah di dapat dan kemampuan komponen berdasarkan datasheet.
Spesifikasi rangkaian dc dc converternya adalah sebagai berikut:
Tegangan Masukan (Vin) = 279 V
Frekuensi Switching (fs) = 3.9 Khz
Beban Resistif (R) = 560 Ohm
Ripple Tegangan ( = 2 Volt
Inductor minimum dapat dihitung dengan persamaan
(3.1) =
Lmin = 0.051 H
= 51 mH
Capacitor minimum dapat dihitung dengan persamaan
(3.2)
= 4.1 x F
Gambar 3.2. Rangkaian DC DC Converter (Buck)
3.1.2 Rangkaian Regulator 18 V
Pada rangkaian ini menggunakan Transformator Stepdown sebagai penurun tegangan dan nebgguabakan Regulator untuk menghasilkan tegangan konstan 18 Volt.
Gambar 3.3 . Rangkaian Regulator 18V
Rangkaian ini berfungsi supply untuk gate Driver karena Mosfet Hanya berfungsi jika diberikan tegangan diatas 10 Volt pada kaki Drain dan Source
3.1.3 Rangkaian LCD
Display LCD adalah sebuah display yang memberikan informasi sistem, berupa status atau data hasil olahan. Display yang digunakan adalah LCD 16x2, yaitu display 2x16 karakter. Karakter yang dapat ditampilkan LCD M16x2 adalah M16x2 adalah karakter ASCII. Display LCD memperoleh data melalui kontroler ATMEGA328. Dalam hal ini, display LCD digunakan untuk menampilkan posisi x, posisi y, dan posisi z pada suatu bidang.Berikut rangkaian LCD:
Gambar 3.4. Rangkaian LCD
3.1.4 Rangkaian Gate Driver
Pada rangkaian ini menggunakan Optocopler P817 Sebagai Gate Driver untuk mendriver Mosfet. Optocopler P817 mendapat inputan sinyal dari arduino Uno dengan tegangan High=5Volt dan LOW=0Volt. Sinyal tersebut dipancarkan oleh Dioda dalam Optocopler dan menjadi basis untuk phototransistor Optocopler, Kondisi High dan Low akan berubah menjadi 18 & 0 Volt karena Inputan dari collector Transistor adalah 18 Volt yang didapatdari regulator 18 Volt sebelmunnya.
Gambar 3.5. Rangkaian Gate Driver
3.1.5 Rangkaian Sensor Arus
Snesor arus yang digunakan dalam rangkaian ini adalah ASC712 30A Sensor ini memiliki pembacaan dengan ketepatan yang tinggi, karena didalamnya terdapat rangkaian low-offset linear Hall dengan satu lintasan yang terbuat dari tembaga. cara kerja sensor ini adalah arus yang dibaca mengalir melalui kabel tembaga yang terdapat didalamnya yang menghasilkan medan magnet yang di tangkap oleh integrated Hall IC dan diubah menjadi tegangan proporsional. Berikut rangkaian ACS712
Gambar 3.6. Rangkaian Sensor Arus
3.1.6 Rangkaian Sensor tegangan
Sensor tegangan untuk rangkaian ini menggunakan 2 Buah Resistor yaitu 1M Ohm dan 47Kohm. Rangkaian Sensor tegangan sendiri menggunakan prinsip pembagi tegangan dengan output maksimal adalah 5volt yang akan terbaca oleh pin Analog Arduino Uno. Berikut rangkaiannya:
Gambar 3.7 Rangkaian Sensor Tegangan
3.1.7 Arduino UNO
Microcontroler yang digunakan dalam rangkaian ini adalah Arduino Uno.
Arduino Uno dalam rangkaian ini berfungsi sebagai penghasil sinyal , pengatur dutycycle, Pengatur Feedback, Pembaca tegangan dan untuk menampilkan data ke LCD. Berikut adalah pengguanaan Arduino Uno dalam rangkain DC DC Converter.
Gambar 3.8 Rangkaian Arduino
3.1.8 Rangkaian Neon Tiruan
Rangkaian Neon tiruan ini dibuat dengan cara men-serikan HPL dengan tegangan Kerja 3 Volt yang berjumlah 25 Buah Sehingga didapatkan tegangan kerja 3 x 25 LED = 75 Volt.
Gambar 3.9 RangkaianLampu Neon tiruan
3.2 Diagram alir (Flowchart) 3.2.1 Flowchart Software
Gambar 3.10. Flowchart Software
BAB 4
PENGUJIAN ALAT DAN PROGRAM
4.1 Pengujian Rangkaian Regulator
Pada Pengujian Rangkaian Regulator ini dilakukan dengan mengukur tegangan keluaran menggunakan Voltmeter. Tegangan yang dihasilkan diperoleh dari sumber Tegangan PLN 220 Volt yang dialirkan menuju Trafo. Trafo akan menurukan tegangan 220 Volt AC menjaci 24 Volt AC. Kamudian disearahkan menjadi tengangan DC menggunakan Dioda Bridge. Tegangan DC tersebut difilter oleh Kapasitor agar memperkecil Noise Tegangan DC. Kemudian diregulasi menjadi tegangan 18 Volt Oleh IC regulator. Positif Voltmeter dihubungkan ke output regulator dan negative voltmeter dihubungkan ke ground. Pada voltmeter dibuktikkan bahwa nilai tegangan keluaran dari regulator adalah 17,79 V. Regulator dapat beroperasi dengan baik. Berikut adalah gambar pengukuran tegangan keluaran dari rangkaian Regulator.
Gambar 4.1. Pengujian rangkaian Regulator
4.2 Pengujian Rangkaian LCD
Pada Pengujian Rangkaian LCD bertujuan untuk mengetahui apakah LCD dapat berjalan dengan baik. Listing Programnya adalah :
#include <LiquidCrystal.h>
LiquidCrystal lcd(2, 3, 4, 6, 7, 8);
void setup() { lcd.begin(16, 2) }
void loop() {
lcd.print("Elco Firdaus");
}
Pada tampilan LCD menggunakan 4 bit, data yang dikirim pertama kali ke LCD dimulai dari D0-D3 dan dilanjutkan dari D4-D7. Jumlah hexa yang ada diperoleh dari kode ASCII. Tegangan yang digunakan dari mikrokontroler ke LCD adalah sebesar +5V
Tabel 4.1 Keadan setiap bit untuk tampilan “Elco Firdaus ”
D7 D6 D5 D4 D3 D2 D1 D0
E 0 1 0 0 0 1 0 1
l 0 1 1 0 1 1 0 0
c 0 1 1 0 0 0 1 1
o 0 1 1 0 1 1 1 1
0 0 0 0 0 0 0 0
F 0 1 0 0 0 1 1 0
i 0 1 1 0 1 0 0 1
r 0 1 1 1 0 0 1 0
d 0 1 1 0 0 1 0 0
a 0 1 1 0 0 0 0 1
u 0 1 1 1 0 1 0 1
s 0 1 1 1 0 0 1 1
Gambar 4.2 Rangkaian LCD
Setelah LCD dirangkai dan dilakukan penggungahan program diatas ke microcontroler maka akan tampil di LCD tulisan “Elco Firdaus”.
Gambar 4.3 Pengujuan LCD
Kesimpulan yang dapat diambil dari pengujuan ini adalah LCD teelah dirangkai dengan baik dan bekerja sesuai dengan perintah yang telah diberikan kepada microcontroler.
4.3 Pengujian Sensor Tegangan
Pengujian pada Sensor tegangan ini dapat dilakukan dengan mengukur keluaran dari pembagi tegangan pada 2 buah resistor. Listing Programmnya adalah
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 13, 10, 9, 8);
Int pinIn=A0;
void setup() { lcd.begin(16, 2);
pinMode(11, OUTPUT);
Serial.begin(9600);}
voidloop() {
int sensorValue = analogRead(A0); float voltage = sensorValue * 0.1056;
lcd.setCursor(0, 0);lcd.print(voltage);
lcd.print(“Volt”);}
Untuk membaca sensor dengan output tegangan analog, microcontroler menggunakan pin analog A0-A5 terhubung dengan sebuah ADC dengan resolusi 10 bit yang akan menghasilkan angka digital 0-1023 sebagai representasi tengangan analog 0-5 Volt. Dalam Penelitian ini tegangan yang dihasilkan adalah sekitar 75 Volt, berarti agar dapat menghasilkan tegangan 5 volt maka digunakan prinsip pebagi tegangan yaitumenggunakan resistor 1 MOhm dan 47 KOhm. Hasil pembacaan tegangan akan dikonversi oleh ADC lalu dikalikan dengan factor pengali yaitu 0,1056, Sehingga didapat tegangan yang sesuai dengan aslinya.
Gambar 4.4 Rangkaian Sensor Teganggan
Gambar 4.5 Pengujian Sensor Tegangan
Tabel 4.2 Data pengujian sensor tegangan Pengujian
Ke
Tegangan Multimeter (Volt)
Tegangan Sensor(Volt)
Ralat (%)
1 70,6 71,1 7,03
2 60,3 60,5 3,30
3 52,4 52,7 5,69
Rata Rata Ralat 5,34
4.4 Pengujian Sensor Arus
ACS712-30A (Allegro Current Sensor) adalah sensor arus yang akan mendeteksi arus yang mengalir yang disebabkan adanya beban yang terpasang apda terminal beban. Keluaran dari sensor ini yaitu berupa tengangan analog dengan sensivitas 100mV/A. Artinya setiap ada arus yang melewati sensor sebesar 1 A maka sensor akan merespon dengan memberikan tegangan keluaran sebesar 100mV/A adapaun pengujian ini bertujuan untuk mendapatkan nilai arus yang terbaca, baik menggunakan alat ukur multimeter maupun alat yang dirancang pada setiap daya yang digunakan. Pada pengujian rangkaian Sensor Arus dilakukan dengan menjalankan program berikut :
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 9, 10, 8, 7);
void setup() {
// put your setup code here, to run once:
}
void loop() {
float AcsValue=0.0,Samples=0.0,AvgAcs=0.0,AcsValueF=0.0;
for (int x = 0; x < 150; x++){
AcsValue = analogRead(A0);
Samples = Samples + AcsValue;
delay (3);
}
AvgAcs=Samples/150.0;
AcsValueF = (2.490 - (AvgAcs * (5.0 / 1024.0)) )/0.100;
lcd.begin(16, 2);
lcd.setCursor(0,0);
lcd.print("ARUS = ");
lcd.print(AcsValueF);
lcd.print(" A");
}
Gambar 4.6 Rangkaian Sensor Arus
Gambar 4.7 Pengujian Sensor Arus
Tabel 4.3 Data pengujian sensor Arus Pengujian Ke Arus pada
Multimeter (A)
Arus pada Sensor ACS 712 (A)
Ralat (%)
1 0.030 0.031 3,22
2 0.040 0.046 13,04
3 0.050 0.060 20,00
4 0.070 0.072 2,77
Rata rata ralat 9,75
4.5 Pengujian Gate Driver
Gate driver adalah komponen elektronika yang berfungsi sebagai pengendali gerbang pada mosfet. Pada microcontroler arduino dihasilkan gelombang pulsa dengan tegangan high adalah 5 volt dan tegangan low adalah 0 Volt. Pada gate driver ini terjadi proses peningkatan tegangan dengan sistem transistor sebagai penguat.
Dalam penelitian ini transistor yang digunakan adalah phototransistor yang terdapat pada Optocoupler PI817. Sebagaimana prinsip phototransistor, Basenya adalah
penangkap cahaya dari led yang terdapat di depannya. Collector terhubung dengan sumber tegangan yang diinginkan, dalampenelitian ini diberikan tegangan 18 Volt.
Saat Led menerima frekuensi dari arduino, phototransistor akan menangkap cahaya tersebut dan akan memberikan frekuensi yang sama yang didapat dari microcontroler namun dengan tegangan yang telah ditingkatkan. Pengujian Gate driver dilakukan dengan cara memberikan frekuensi dari program arduino lalu dicek frekuensi pada gate driver apakah sesuai dengan frekuensi yang dihasilkan arduino. Serta melihat gelombang yang dihasilkan menggunakan osiloscope.
Gambar 4.8 Pengujian Gate driver
Gambar 4.9 Pengujian bentuk pulsa Gate Driver dengan Duty Cycle 80%
4.6 Pengujian Rangkaian Keseluruhan
4.6.1 Pengujian Duty Cyccle terhadap tegangan
Pengujuan ini bertujuan untk mengetahui pengaruh duty Cycle terhadap Outout dari DC DC converter. Pengujian dilakukan dengan cara mengubah dutycycle dan mengukur tegangan yang dihasilkan oleh dc dc converter. Interval Duty cycle adalah per 10%.tegangan Input dari Dioda Bridge dan Capacitor adalah 279 V
Tabel 4.4 Pengaruh Duty Cycle terhadap Tegangan
No DutyCycle(%) Tegangan (V) I (A)
1 10 28.3 0.048
2 20 54.2 0.092
3 28 74.1 0.123
4 30 81.1 0.140
5 40 106.2 0.181
6 50 130.7 0.195
7 60 155.1 0.256
8 70 183.2 0.305
9 80 208.7 0.360
10 90 237.4 0.413
Gambar 4.10 Pengujian Duty Cycle terhadap Tegangan
4.6.2 Pengujian Efisiensi DC to DC Converter
Efisiensi Dc to Dc converter dapat dicari dengan cara menghitung perbandingan daya input ( dan daya Output ( ) pada DC to DC Converter pada masing masing percobaan dengan menggunakan persamaan:
Tabel 4.5 Data Pengujian Efisiensi DC to DC Converter Duty Cycle
(%) Vin (V) Iin (A) Vout(V) Iout(A) Efisiensi (%)
10 279 0.007 28.3 0.048 69.53
20 279 0.024 54.2 0.092 74.4
28 279 0.040 74.1 0.123 79.9
30 279 0.052 81.1 0.140 78.2
40 279 0.083 106.2 0.181 83
50 279 0.109 130.7 0.195 83.8
60 279 0.159 155.1 0.256 89.5
70 279 0.225 183.2 0.305 89.1
80 279 0.296 208.7 0.360 90.9
90 279 0.366 237.4 0.413 95.8
4.6.3 Pengujian Tegangan dengan Umpan Balik (Feedback)
Pengujian tegangan dengan feedback dilakukan dengan memprogram kenaikan dan penurunan dutycycle sesuai dengan pengukuran tegangan. Listing program yang diginakan adalah sebagai berikut;
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 13, 10, 9, 8);
int led = 3;
int sensorValue ; int duty=180;
void setup() {
TCCR2B = TCCR2B & B11111000 | B00000010;
TCCR0B = TCCR0B & B11111000 | B00000010;
pinMode(led,OUTPUT);
pinMode(11, OUTPUT);
Serial.begin(9600);
}
void loop() {
analogWrite(led, duty );
lcd.setCursor(0, 0);
int sensorValue = analogRead(A0);
float voltage = sensorValue * 0.1056;
float AcsValue=0.0,Samples=0.0,AvgAcs=0.0,AcsValueF=0.0;
for (int x = 0; x < 150; x++){
AcsValue = analogRead(A0);
Samples = Samples + AcsValue;
delay (3);
}
AvgAcs=Samples/150.0;
AcsValueF = (2.490 - (AvgAcs * (5.0 / 1024.0)) )/0.100;
if (voltage <= 74) {
duty = duty-1;
duty = constrain(duty, 179, 186);
delayMicroseconds(1);
}
if (voltage >= 74) {duty = duty+1;
duty = constrain(duty, 179, 186);
delayMicroseconds(1);}
int dt=duty-125;
float dr=dt*0.00392;
int gb=dr*100;
lcd.setCursor(0, 0);
lcd.print("V(v) I(mA) D(%)");
lcd.setCursor(0, 1);
lcd.print(voltage);
lcd.setCursor(6, 1);
lcd.print(AcsValueF);
lcd.setCursor(13, 1);
lcd.print(gb);}
Setelah program di upload dan alat dijalakan didapatkan tegangan Ouptut yang stabil pada range 73.8dan 74,1V.
Gambar 4.11 Pengujian rangkaian keseluruhan dengan beban HPL (High Power LED) seri dan dengan Feedback
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil perancangan alat hingga pengujian dan pembahasan sistem maka penulis dapat menarik kesimpulan, antara lain :
1. DC DC converter Berbasis Microcontroler Arduino dapat berjalan dengan baik dengan Arduino sebagai pemberi pulsa sebesar 3,9Khz.
Output hasil pengukuran arus dan tegangan ditampilkan melalui LCD dan pengaturan Dutycycle untuk mengatur Tegangan yang dihasilkan.
2. Ouput yang dihasilkan adalah 73,8 -74,1 yang di hasilkan dengan menagtur frekuensi 3,9Khz dan Dutycycle 28% .
3. Untuk mendapatkan Output yang stabil dilakukan dengan mengubah dutycycle sesuai dengan perubahan tegangan. Jika pengukuran tegangan lebih dari 75 Volt maka akan dilakukan penurunan dutycycle oleh Microcontroler dan jika terjadi pengukuran kurang dari 75 volt makan akan dilakukan penambahan dutycycle Oleh Microcontroler Arduino Uno. Proses pengurangan dan penambahan dutycycle ini dilakukan dengan sangat cepat shingga output yang dikeluarkan lebih stabil terhadap beban.
5.2 Saran
Setelah melakukan penelitian, diperoleh beberapa hal yang dapat dijadikan saran untuk dilakukan penelitian lebih lanjut yaitu :
1. Diharapkan untuk penelitian selanjutnya dapat menggunakaan system minimum yang lebih kecil.
2. Diharapkan alat ini dapat diterapkan dalam kehidupan nyata agar dapat membantu penghematan daya listrik.
DAFTAR PUSTAKA
Anam, Choirul Moch. 2008. Elektronika.Pasuruan Modul Alat Ukur Elektronika Yogyakarta: Universitas Negeri Yogyakarta
Internalis, Baskara. 2007. Pengaruh Variasi Tegangan DC Chopper Dan Variasi Frekuensi Inverter Pada Pengaturan Kecepatan Motor Induksi 3 Fasa 1
Hp Berbasis Mikrokontroller, Universitas Diponegoro.
Heri,Andrianto, 2013. Pemrograman Mikrokontroler AVR ATmega 16 menggunakan bahasa C (CodeVisionAVR), Bandung. Informatika Bandung.
Romy Budhi Widodo, 2009. Embedded system menggunakan mikrokontroler dan pemrograman C, Yogyakarta. Andi.
Usman.2008. Teknik Antarmuka dan Pemrograman mikrokontroler AT89S52.
Yogyakarta: Andi Offset
Wardhana, Lingga. 2006. Belajar Sendiri Mikrokontroler AVR Seri ATMega8535 Simulasi, Hardware, dan Aplikasi. Yogyakarta: Andi Offset
Wasito S. 1986. Kumpulan Data Penting Komponen Elektronika. Jakarta: PT Multimedia
Wira Cahyadi, Lukman, 2016. Kinerja Konverter Searah tipe Buck converter dengan umpan balik tegangan berbasis TLP494.Semarang [Skripsi].
Universitas Diponogoro. Program sarjana.
http://jurnal.unikom.ac.id/_s/data/jurnal/v08-n02/volume-82-artikel- 5.pdf/pdf/volume-82-artikel-5.pdf
LAMPIRAN 1. Program Lengkap
Program bahasa C
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 13, 10, 9, 8);
int led = 3;
int sensorValue ; int duty=180;
void setup() {
TCCR2B = TCCR2B & B11111000 | B00000010;
TCCR0B = TCCR0B & B11111000 | B00000010;
pinMode(led,OUTPUT);
pinMode(11, OUTPUT);
Serial.begin(9600);
}
void loop() {
analogWrite(led, duty );
lcd.setCursor(0, 0);
int sensorValue = analogRead(A0);
float voltage = sensorValue * 0.1056;
float AcsValue=0.0,Samples=0.0,AvgAcs=0.0,AcsValueF=0.0;
for (int x = 0; x < 150; x++){
AcsValue = analogRead(A0);
Samples = Samples + AcsValue;
delay (3);
}
AvgAcs=Samples/150.0;
AcsValueF = (2.490 - (AvgAcs * (5.0 / 1024.0)) )/0.100;
if (voltage <= 74) {
duty = duty-1;
duty = constrain(duty, 179, 186);
delayMicroseconds(1);
}
if (voltage >= 74) {
duty = duty+1;
duty = constrain(duty, 179, 186);
delayMicroseconds(1);
}
int dt=duty-125;
float dr=dt*0.00392;
int gb=dr*100;
lcd.setCursor(0, 0);
lcd.print("V(v) I(mA) D(%)");
lcd.setCursor(0, 1);
lcd.print(voltage);
lcd.setCursor(6, 1);
lcd.print(AcsValueF);
lcd.setCursor(13, 1);
lcd.print(gb);
}
LAMPIRAN 2. Rangkaian Lengkap
LAMPIRAN 3. Foto Alat