ABSTRAK
Tikus merupakan hewan pengerat yang keberadaannya kadangkala
mengganggu aktifitas manusia. Rentang frekuensi pendengaran dari tikus adalah
di bawah 45 KHz.
Pada tugas akhir ini dilakukan perancangan pembangkit frekuensi ultrasonik
(20 KHz s/d 42 KHz) menggunakan sebuah mikrokontroler (AT89S52). Dengan
tujuan utamanya adalah mengamati respon tingkah laku tikus putih (objek
percobaan pada tugas akhir ini) terhadap perubahan frekuensi pada daerah kerja
yang dimaksud (20 KHz s/d 42 KHz), pemancaran frekuensi ini disalurkan
melalui tweeter yang mampu beroperasi sampai frekuensi 50 KHz. Tikus putih
yang akan dijadikan objek pada tugas akhir ini, sebelumnya telah dibiasakan
untuk makan dan minum di satu tempat tertentu (di dalam labirin), kemudian
untuk melakukan pengamatan, alat ini diletakkan pada daerah di mana tikus putih
sering berkumpul untuk sekedar makan dan minum tersebut. Alat ini secara nyata
mampu mempengaruhi respon tingkah laku dari tikus putih yang dimaksud pada
range frekuensi 29 KHz s/d 42 KHz.
DAFTAR ISI
LEMBAR PENGESAHAN
SURAT PERNYATAAN
ABSTRAK……….…... i
ABSTRACT……….……... ii
KATA PENGANTAR………...…...…...
iii
DAFTAR ISI………...
v
DAFTAR TABEL………...
vii
DAFTAR GAMBAR………...
viii
BAB I
PENDAHULUAN………...
1
1.1.
Latar
Belakang...
1
1.2.
Identifikasi
Masalah...
1
1.3. Maksud dan Tujuan...
1
1.4.
Pembatasan
Masalah...
2
1.5.
Sistematika
Penulisan...
2
BAB II
LANDASAN TEORI………...
3
2.1.
Mikrokontroler
(AT89S52)...
3
2.1.1.
Arsitektur
AT89S52...
4
2.1.2.
Organisasi
Memori...
5
2.1.2.1.
Program
Memori...
5
2.1.2.2.
Data
Memori...
6
2.1.3.
Special Function Register (SFR)...
7
2.1.4.
Port I/O AT89S52...
8
2.1.5.
Pemberian
clock pada AT89S52...
12
2.1.6.
Timer ...
13
2.2.
LCD
(Liquid Crystal Display)………..
14
2.3.
Keypad ...
18
2.4.
Gelombang
Ultrasonik...
19
2.5.
L7800
series ……… 20
3.1.
Perancangan...
21
3.2.
Perancangan
Hardware... 22
3.2.1. Rangkaian Mikrokontroler (AT89S52)...
22
3.2.2.
Keypad... 25
3.2.3.
LCD
(Liquid Crystal Display)... 26
3.2.4.
Buffer (74LS00)... 28
3.2.5.
Band Pass Filter ... 29
3.2.6.
Tweeter... 30
3.2.7.
Power Supply... 31
3.3.
Perancangan
software... 32
BAB IV
DATA PENGAMATAN DAN ANALISA………...………...
36
4.1. Pengamatan pada testing point I, II, dan III ...
36
4.2. Pendefinisian karakter tikus putih ...
42
4.3. Hasil pengamatan respon tikus putih terhadap frekuensi
ultrasonik ...
44
BAB V
KESIMPULAN DAN SARAN………...
57
5.1.
Kesimpulan...
57
5.2.
Saran...
57
DAFTAR PUSTAKA
LAMPIRAN A
Foto Alat ...
A-1
Rangkaian
Lengkap
………...
A-2
Daftar Komponen ………..
A-3
LAMPIRAN B
Listing Program ...
B-1
LAMPIRAN C
LCD-016M002B
………
C-1
AT89S52
………
C-3
74LS00
………..
C-16
L7800 SERIES : POSITIVE VOLTAGE REGULATORS …………..
C-18
DAFTAR TABEL
Tabel 2.1
Special Function Register... 7
Tabel 2.1
(sambungan ...)
Special Function Register...
8
Tabel 2.2
Fungsi masing - masing pin LCD 16x2... 16
Tabel 2.3
Tabel Kontrol Perintah LCD...
17
Tabel 2.4
Pemetaan Tombol pada Keypad ………...
19
Tabel 3.1
Hubungan pin-pin LCD dengan mikrokontroler (AT89S52)... 29
Tabel 4.1
Tampilan sinyal pada testing point I, testing point II, dan testing
point III ... 37
Tabel 4.1
(lanjutan ...)
Tampilan sinyal pada testing point I, testing point II, dan testing
point III ... 38
Tabel 4.1
(lanjutan ...)
Tampilan sinyal pada testing point I, testing point II, dan testing
point III ... 39
Tabel 4.1
(lanjutan ...)
Tampilan sinyal pada testing point I, testing point II, dan testing
point III ... 40
Tabel 4.1
(lanjutan ...)
Tampilan sinyal pada testing point I, testing point II, dan testing
point III ... 41
DAFTAR GAMBAR
Gambar 2.1
Diagram blok mikrokontroler (AT89S52)...
4
Gambar 2.2
Organisasi Program memori……….
6
Gambar 2.3
Organisasi Data Memori...
7
Gambar 2.4
Port 0...
9
Gambar 2.5
Port 1……….
10
Gambar 2.6
Port 2……….
11
Gambar 2.7
Port 3……….
12
Gambar 2.8
Rangkaian kristal AT89S52... 13
Gambar 2.9
Register T2CON... 14
Gambar 2.10
Gambar struktur LCD... 15
Gambar 2.11
Gambar LCD 16x2... 15
Gambar 2.12
Diagram blok keypad... 18
Gambar 2.13
Beberapa bentuk L7800 series... 20
Gambar 3.1
Diagram Blok Keseluruhan Sistem... 21
Gambar 3.2
Letak masing-masing port mikrokontroler (AT89S52)... 23
Gambar 3.3
Rangkaian mikrokontroler AT89S52... 24
Gambar 3.4
Diagram blok keypad dengan mikrokontroler (AT89S52)... 25
Gambar 3.5
Hubungan pin 3 dengan potensiometer... 27
Gambar 3.6
Hubungan setiap pin LCD dengan AT89S52... 28
Gambar 3.7
Hubungan output mikrokontroler dan buffer... 29
Gambar 3.8
Rangkaian band pass filter yang digunakan ... 30
Gambar 3.9
Hubungan buffer dan band pass filter dengan tweeter ... 31
Gambar 3.10
Rangkaian tambahan regulator L7805 ... 31
Gambar 3.11
Flow chart sistem keseluruhan ...
33
Gambar 3.11
(lanjutan ...)
Flow chart sistem keseluruhan ...
34
Gambar 4.1
Keadaan tikus putih sebelum frekuensi dibangkitkan ...
43
Gambar 4.2
Keadaan tikus putih sesudah frekuensi dibangkitkan ... 43
Gambar 4.4
Grafik pemetaan karakter pada interval 1.0 detik ... 46
Gambar 4.5
Grafik pemetaan karakter pada interval 1.5 detik ... 47
Gambar 4.6
Grafik pemetaan karakter pada interval 2.0 detik ... 48
Gambar 4.7
Grafik pemetaan karakter pada interval 2.5 detik ... 49
Gambar 4.8
Grafik pemetaan karakter pada interval 3.0 detik ... 50
Gambar 4.9
Grafik pemetaan karakter pada interval 3.5 detik ... 51
Gambar 4.10
Grafik pemetaan karakter pada interval 4.0 detik ... 52
Gambar 4.11
Grafik pemetaan karakter pada interval 4.5 detik ... 53
Gambar 4.12
Grafik pemetaan karakter pada interval 5.0 detik ... 54
Gambar 4.13
Grafik pengamatan untuk range frekuensi 29 KHz s/d 42 KHz
dengan interval 2.0 detik ...
55
Gambar 4.14
Grafik pengamatan untuk range frekuensi 29 KHz s/d 42 KHz
dengan interval 2.5 detik ...
55
Gambar 4.15
Grafik pengamatan untuk range frekuensi 29 KHz s/d 42 KHz
dengan interval 3.5 detik ...
56
Gambar 4.16
Grafik pengamatan untuk range frekuensi 29 KHz s/d 42 KHz
dengan interval 4.0 detik ...
56
●
Foto Alat ………
A-1
●
Rangkaian Lengkap ……….
A-2
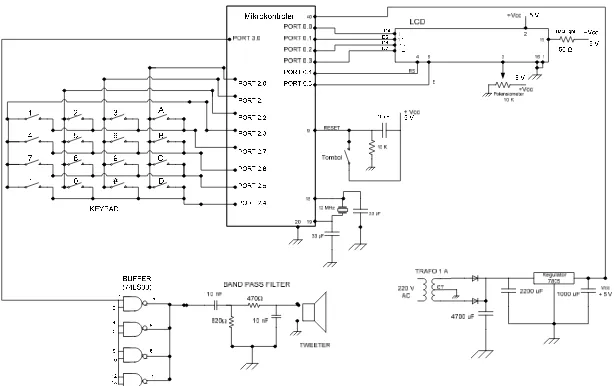
Gambar A.1 Foto alat secara global
Gambar A.2 Rangkaian lengkap keseluruhan sistem
Daftar Komponen
ACTIVE DEVICE
74LS00 Amplifier
1
Tweeter
Piezo Super Tweeter
1
KITEL 246
Crystal 12 MHz
1
1N4002 Rectifier
Diode
2
KBP307 Bridge
Diode
1
L7805 Regulator
1
AT89S52 Microcontroller
1
RESISTORS
10
K
Ω
1
1.5 K
Ω
1
330
Ω
1
100
Ω
2
470
Ω
1
820
Ω
1
POTENTIOMETER
10 K
Ω
1
CAPASITORS
4700 µF
2
2200 µF
1
1000 µF
1
10 µF
1
33 pF
2
10 nF
2
TRANSFORMATOR / TRAFO
TRAFO CT 1 A
1
LCD
LCD 16 x 2
Display Screen
1
KEYPAD
Keypad 4 x 4
Input Device
1
LAMPIRAN B
; PROGRAM PENGUSIR TIKUS ; BY KENNEDY SUMARLIE
; Program Tampilan LCD ; ====================== ; VARIABLE:
outp equ p3.0 command equ 31h character equ 32h D_BIN equ 33h ASCH equ 34h ASCL equ 35h L_DL0 equ 36h L_DL1 equ 37h L_DL2 equ 38h S_DL0 equ 39h S_DL1 equ 3Ah S_DL2 equ 3Bh key equ 3Dh datakey equ 3Eh RS equ P0.4 EN equ P0.6 LCD equ P0 period equ 41h datakey1 equ 42h datakey2 equ 43h freq_bawah equ 44h freq_atas equ 45h temp1 equ 46h temp2 equ 47h
; =============================================== ; PROGRAM UTAMA
; =============================================== org 00h ; alamat awal 00
ljmp main_prog
org 100h ; alamat program
; --- ; subrutin line 1
; --- line1: mov command,#80h lcall send_command mov r7,#10h next1:
mov a,#0h movc a,@a+dptr mov character,a lcall send_character inc dptr
djnz r7,next1 ret
; --- ; subrutin line 2 ; ---
line2:
mov command,#0C0h lcall send_command mov r7,#10h
next2:
mov a,#0h movc a,@a+dptr mov character,a lcall send_character inc dptr
djnz r7,next2 ret
; --- ; subrutin scan keypad ; --- scankey:
mov p2,#0FFh ; semua high clr P2.7 ; baris 1
JB P2.3,KEY1 ; kolom 1, baris 1 mov key,#'1'
mov datakey,#1 ret
KEY1:
JB P2.2,KEY2 ; kolom 2, baris 1 mov key,#'2'
mov datakey,#2 ret
KEY2:
JB P2.1,KEYA ; kolom 3, baris 1 mov key,#'3'
mov datakey,#3 ret
KEYA:
JB P2.0,KEY3 ; kolom 4, baris 1 mov key,#'A'
mov datakey,#0 ret
KEY3:
mov P2,#0ffh
clr p2.6 ; baris 2
JB P2.3,KEY4 ; kolom 1, baris 2 mov key,#'4'
mov datakey,#4 ret
KEY4:
JB P2.2,KEY5 ; kolom 2, baris 2 mov key,#'5'
mov datakey,#5 ret
KEY5:
JB P2.1,KEYB ; kolom 3, baris 2 mov key,#'6'
mov datakey,#6 ret
KEYB:
JB P2.0,KEY6 ; kolom 4, baris 2 mov key,#'B'
mov datakey,#0 ret
KEY6:
MOV P2,#0FFh
clr p2.5 ; baris 3
JB P2.3,KEY7 ; kolom 1, baris 3 mov key,#'7'
mov datakey,#7 ret
KEY7:
JB P2.2,KEY8 ; kolom 2, baris 3 mov key,#'8'
mov datakey,#8 ret
KEY8:
JB P2.1,KEYC ; kolom 3, baris 3 mov key,#'9'
mov datakey,#9 ret
KEYC:
JB P2.0,KEY9 ; kolom 4, baris 3 mov key,#'C'
mov datakey,#0 ret
KEY9:
mov P2,#0FFh
clr p2.4 ; baris 4
JB P2.3,KEY10 ; kolom 1, baris 4 mov key,#'*'
mov datakey,#0 ret
KEY10:
JB P2.2,KEY11 ; kolom 2, baris 4 mov key,#'0'
mov datakey,#0 ret
KEY11:
JB P2.1,KEYD ; kolom 3, baris 4 mov key,#'#'
mov datakey,#0h ret
KEYD:
JB P2.0,dela ; kolom 4, baris 4 mov key,#'D'
mov datakey,#0h ret
dela:
call delay_50_ms ajmp scankey
; --- ; Subrutin inisialisasi LCD ; ---
init_LCD:
LCALL SDLY LCALL SDLY
MOV LCD,#02H ; Set mode operasi LCD 4 bit
setb EN
mov S_DL0,#00h ; Delay power on LCD MOV S_DL1,#4h
lcall SDLY clr EN
mov command,#28h ; Set mode LCD 16 karakter 2 baris lcall send_command
lcall sdly
mov command,#08h ; Turn off LCD lcall send_command
lcall sdly
mov command,#0Ch ; Turn on LCD lcall send_command
lcall sdly
mov command,#06h ; Increment address mode lcall send_command
lcall sdly ret
; --- ; subrutin kirim perintah ke LCD ; --- send_command:
mov LCD,#00H clr RS mov a,command anl a,#0f0h swap a
mov LCD,a setb EN mov S_DL1,#1h lcall SDLY clr EN mov a,command anl a,#0fh mov LCD,A setb EN mov S_DL1,#1h lcall SDLY clr EN ret
; --- ; subrutin kirim charakter ke LCD ; --- send_character:
mov LCD,#00H mov a,character anl a,#0F0h swap a
mov LCD,a setb RS setb EN mov S_DL1,#1h lcall SDLY clr EN mov a,character anl a,#0fh mov LCD,a setb RS setb EN mov S_DL1,#1h lcall SDLY clr EN ret
; ---
SDLY:
djnz S_DL0,SDLY djnz S_DL1,SDLY ret
; ---DELAY DARI KEYPAD ---
perioda:
mov A,period
cjne A,#05h,cekperioda2 ; 0,5 detik (maksudnya interval) call delay_05_s
ret cekperioda2:
cjne A,#10h,cekperioda3 ; 1,0 detik call delay_1_s
ret
cekperioda3:
cjne A,#15h,cekperioda4 call delay_1_s
call delay_05_S ret
cekperioda4:
cjne A,#20h,cekperioda5 call delay_1_s
call delay_1_s ret
cekperioda5:
cjne A,#25h,cekperioda6 call delay_1_s
call delay_1_s call delay_05_S ret
cekperioda6:
cjne A,#30h,cekperioda7 call delay_1_s
call delay_1_s call delay_1_S ret
cekperioda7:
cjne A,#35h,cekperioda8 call delay_1_s
call delay_1_s call delay_1_S call delay_05_s ret
cekperioda8:
cjne A,#40h,cekperioda9 call delay_1_s
call delay_1_s call delay_1_S call delay_1_s ret
cekperioda9:
cjne A,#45h,cekperioda10 call delay_1_s
call delay_1_s call delay_1_S call delay_1_s call delay_05_s ret
cekperioda10: cjne A,#50h,quit call delay_1_s call delay_1_s call delay_1_S call delay_1_s call delay_1_s ret
quit:
call delay_1_s ret
;---; ; BIN TO ASCII SUBROUTIN ;---; BIN2ASC:
MOV A,D_BIN ANL A,#0FH ADD A,#0F6H JNC NOADJL ADD A,#07H
NOADJL:
ADD A,#3AH MOV ASCL,A MOV A,D_BIN SWAP A ANL A,#0FH ADD A,#0F6H JNC NOADJL2 ADD A,#07H
NOADJL2:
ADD A,#3AH MOV ASCH,A RET
; --- ; DELAY 50 milisecond ; --- delay_50_ms: mov R5,#50 count_50_ms:
mov R6,#02H finish_50_ms:
mov R7,#0FFH
djnz R7,$
djnz R6,finish_50_ms djnz R5, count_50_ms ret
; --- ; Subrutin delay 1 second ; --- delay_1_s:
call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms ret
delay_05_s:
call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms call delay_50_ms ret
freq_hi: setb outp
djnz r3,$ ret
freq_lo: clr outp
djnz r3,$ ret
; MULAI PROGRAM
; ====================================== main_prog:
; =====================================
lcall delay_1_s lcall init_lcd
mov freq_bawah,#20h mov freq_atas,#42h mov period,#20h
ulang:
mov dptr,#pesan1 acall line1 mov dptr,#pesan2 acall line2 lcall delay_1_s lcall delaY_1_s lcall delay_1_s mov dptr,#blank acall line1 mov dptr,#blank acall line2
mov dptr,#pesan3 acall line1 mov dptr,#pesan4 acall line2 lcall delay_1_s lcall delaY_1_s lcall delay_1_s
mov dptr,#blank acall line1 mov dptr,#blank acall line2
; ---
loop:
mov dptr,#menu1 acall line1 mov dptr,#menu2 acall line2 call scankey mov a,key
cjne A,#'3',cek_1 mov dptr,#berhenti call line1
mov dptr,#berhenti2 call line2
sjmp $ ; BERHENTI
; =========================================
cek_1:
cjne A,#'1',cek_akt sjmp set_freq
cek_akt:
ljmp cek_aktif ; ---
set_freq:
mov dptr,#set1 ; freq bawah acall line1
mov dptr,#blank call line2 call delay_1_s
tekan_ulang:
call scankey mov temp1,datakey mov character,key mov command,#08Ah lcall send_command lcall send_character call delay_05_s call scankey mov temp2,datakey mov character,key lcall send_character mov a,temp1 swap a add a,temp2 mov freq_bawah,a mov a,freq_bawah
cekb20:
cjne A,#20h,cekb22 mov freq_bawah,#20h ljmp frqats
cekb22:
cjne A,#22h,cekb24 mov freq_bawah,#22h ljmp frqats
cekb24:
cjne A,#24h,cekb26 mov freq_bawah,#24h ljmp frqats
cekb26:
cjne A,#26h,cekb29 mov freq_bawah,#26h ljmp frqats
cekb29:
cjne A,#29h,cekb31 mov freq_bawah,#29h ljmp frqats
cekb31:
cjne A,#31h,cekb33 mov freq_bawah,#31h ljmp frqats
cekb33:
cjne A,#33h,cekb36 mov freq_bawah,#33h ljmp frqats
cekb36:
cjne A,#36h,cekb42 mov freq_bawah,#36h ljmp frqats
cekb42:
cjne A,#42h,set_freq mov freq_bawah,#42h ljmp frqats
frqats:
mov dptr,#set2 ; freq atas acall line2
call delay_1_s
tekan_ulang2: call scankey mov temp1,datakey mov character,key mov command,#0CAh lcall send_command lcall send_character call delay_05_s call scankey mov temp2,datakey mov character,key lcall send_character mov a,temp1 swap a add a,temp2 mov freq_atas,a
cekb20a:
cjne A,#20h,cekb22a mov freq_atas,#20h ljmp frqats2
cekb22a:
cjne A,#22h,cekb24a mov freq_atas,#22h
ljmp frqats2
cekb24a:
cjne A,#24h,cekb26a mov freq_atas,#24h ljmp frqats2
cekb26a:
cjne A,#26h,cekb29a mov freq_atas,#26h ljmp frqats2
cekb29a:
cjne A,#29h,cekb31a mov freq_atas,#29h ljmp frqats2
cekb31a:
cjne A,#31h,cekb33a mov freq_atas,#31h ljmp frqats2
cekb33a:
cjne A,#33h,cekb36a mov freq_atas,#33h ljmp frqats2
cekb36a:
cjne A,#36h,cekb42a mov freq_atas,#36h ljmp frqats2
cekb42a:
cjne A,#42h,frqats mov freq_atas,#42h
frqats2:
call delay_1_s
mov dptr,#set3 ; interval: ... detik acall line1
mov dptr,#blank acall line2
baca_tombol:
call scankey mov a,datakey cjne A,#0h,cek11 sjmp data_ok1
cek11:
cjne A,#1h,cek12 sjmp data_ok1
cek12:
cjne A,#2h,cek13 sjmp data_ok1
cek13:
cjne A,#3h,cek14 sjmp data_ok1 cek14:
cjne A,#4h,cek15 sjmp data_ok1 cek15:
cjne A,#5h,baca_tombol
data_ok1:
mov datakey1,datakey mov character,key
mov command,#089h ; LCD baris 1 kolom ke 9 lcall send_command
lcall send_character
mov character,#',' ; memunculkan koma lcall send_character
lcall delay_1_s
ulangi:
call scankey
mov datakey2,datakey mov a,datakey2 cjne A,#0h,cek5 sjmp data_ok
cek5:
cjne A,#5,ulangi
data_ok:
mov A,datakey1 swap A
add A,datakey2 mov period,A mov character,key lcall send_character lcall delay_1_s lcall delay_1_s ljmp loop
; ---
cek_aktif:
cjne A,#'2',loop1A ; aktifkan tweeter mov dptr,#menu2a ; rangkaian aktif acall line1
mov dptr,#out ; freq .... KHz acall line2
sjmp repeat
loop1A: ljmp loop
;--- ; Rangkaian aktif ; --- repeat:
mov a,freq_bawah cjne a,#20h,cek22
ljmp mulai_di_20Khz
cek22:
cjne a,#22h,cek24
ljmp mulai_di_22Khz
cek24:
cjne a,#24h,cek26
ljmp mulai_di_24Khz
cek26:
cjne a,#26h,cek29
ljmp mulai_di_26Khz
cek29:
cjne a,#29h,cek31
ljmp mulai_di_29Khz
cek31:
cjne a,#31h,cek33
ljmp mulai_di_31Khz
cek33:
cjne a,#33h,cek36
ljmp mulai_di_33Khz
cek36:
cjne a,#36h,mul42
ljmp mulai_di_36Khz
mul42:
ljmp mulai_di_42Khz
; --- mulai_di_20Khz:
mov p2,#0FFh clr p2.4
F20Khz:
mov command,#0C8h lcall send_command mov character,#'2' call send_character mov character,#'0' call send_character
jb p2.1,start20 ljmp stop
start20:
mov r0,#12 ul20: mov r1,#100 ul120: mov r2,#100 pulsa_continue20:
djnz R2,pulsa_square20 djnz r1,ul120
djnz r0,ul20
call perioda ; delay
mov a,freq_atas cjne a,#20h,F22Khz
ljmp repeat ; mulai_di_20Khz
; ...
pulsa_square20:
mov r3,#9 call freq_hi mov r3,#8 call freq_lo
ajmp pulsa_continue20
; --- mulai_di_22Khz:
mov P2,#0FFh
F22Khz:
clr P2.4
mov command,#0C8h lcall send_command mov character,#'2' call send_character mov character,#'2' call send_character
jb p2.1,start22 ; cek tombol ‘#’ ljmp stop
start22:
mov r0,#12 ul22: mov r1,#100 ul122: mov r2,#100 pulsa_continue22:
djnz R2,pulsa_square22 djnz r1,ul122
djnz r0,ul22 call perioda
; ...
mov a,freq_atas cjne a,#22h,F24Khz
ljmp repeat ; mulai_di_22Khz
pulsa_square22:
mov r3,#8 call freq_hi mov r3,#7 call freq_lo
ajmp pulsa_continue22
; --- mulai_di_24Khz:
F24Khz:
mov command,#0C8h lcall send_command mov character,#'2' call send_character mov character,#'4' call send_character jb p2.1,start24 ljmp stop
start24:
mov r0,#12 ul24: mov r1,#100 ul124: mov r2,#100 pulsa_continue24:
djnz R2,pulsa_square24 djnz r1,ul124
djnz r0,ul24 call perioda
mov a,freq_atas cjne a,#24h,F26Khz
ljmp repeat ; mulai_di_24Khz
pulsa_square24:
mov r3,#7 call freq_hi mov r3,#6 call freq_lo
ajmp pulsa_continue24 ;
; --- mulai_di_26Khz:
F26Khz:
mov command,#0C8h lcall send_command mov character,#'2' call send_character mov character,#'6'
call send_character jb p2.1,start26 ljmp stop
start26:
mov r0,#12 ul26: mov r1,#100 ul126: mov r2,#100 pulsa_continue26:
djnz R2,pulsa_square26 djnz r1,ul126
djnz r0,ul26 call perioda
mov a,freq_atas cjne a,#26h,F29Khz
ljmp repeat ; mulai_di_26Khz
; ...
pulsa_square26:
mov r3,#6 call freq_hi mov r3,#5 call freq_lo
ajmp pulsa_continue26
; ///////////////////////////////////
mulai_di_29Khz: F29Khz:
mov command,#0C8h lcall send_command mov character,#'2' call send_character mov character,#'9' call send_character jb p2.1,start29 ljmp stop
start29:
mov r0,#12 ul29: mov r1,#100 ul129: mov r2,#100 pulsa_continue29:
djnz R2,pulsa_square29 djnz r1,ul129
djnz r0,ul29 call perioda ; ...
mov a,freq_atas cjne a,#29h,F31Khz
ljmp repeat ; mulai_di_29Khz
; ...
pulsa_square29:
mov r3,#5 call freq_hi mov r3,#4 call freq_lo
ajmp pulsa_continue29
; --- mulai_di_31Khz:
F31Khz:
mov command,#0C8h lcall send_command mov character,#'3' call send_character mov character,#'1' call send_character jb p2.1,start31 ljmp stop
start31:
mov r0,#12 ul31: mov r1,#100 ul131: mov r2,#100 pulsa_continue31:
djnz R2,pulsa_square31 djnz r1,ul131
djnz r0,ul31 call perioda
mov a,freq_atas cjne a,#31h,F33Khz
ljmp repeat ; mulai_di_31Khz
; ...
pulsa_square31:
mov r3,#4 call freq_hi mov r3,#4 call freq_lo
ajmp pulsa_continue31 ;
; ///////////////////////////////////
mulai_di_33Khz: F33Khz:
mov command,#0C8h lcall send_command mov character,#'3'
call send_character mov character,#'3' call send_character
jb p2.1,start33 ljmp stop
start33:
mov r0,#12 ul33: mov r1,#100 ul133: mov r2,#100 pulsa_continue33:
djnz R2,pulsa_square33 djnz r1,ul133
djnz r0,ul33 call perioda
mov a,freq_atas cjne a,#33h,F36Khz
ljmp repeat ; mulai_di_33Khz
; ...
pulsa_square33:
mov r3,#4 call freq_hi mov r3,#3 call freq_lo
ajmp pulsa_continue33
; ///////////////////////////////
; --- mulai_di_36Khz:
F36Khz:
mov command,#0C8h lcall send_command mov character,#'3' call send_character mov character,#'6' call send_character
jb p2.1,start36 ljmp stop
start36:
mov r0,#12 ul36: mov r1,#100 ul136: mov r2,#100 pulsa_continue36:
djnz R2,pulsa_square36 djnz r1,ul136
djnz r0,ul36 call perioda
mov a,freq_atas cjne a,#36h,F42Khz
ljmp repeat ; mulai_di_36Khz
; ...
ljmp mulai_di_42Khz ;
pulsa_square36:
mov r3,#3 call freq_hi mov r3,#3 call freq_lo
ajmp pulsa_continue36 ;
; ///////////////////////////////////
mulai_di_42Khz:
F42Khz:
mov command,#0C8h lcall send_command mov character,#'4' call send_character mov character,#'2' call send_character
jb p2.1,start42 ljmp stop
start42:
mov r0,#12 ; ul42: mov r1,#100 ul142: mov r2,#100 pulsa_continue42:
djnz R2,pulsa_square42 djnz r1,ul142
djnz r0,ul42 call perioda
ljmp repeat ; mulai_di_42Khz
pulsa_square42:
mov r3,#2 call freq_hi mov r3,#2 call freq_lo
ajmp pulsa_continue42 ;
; /////////////////////////// ; Terus looping sampai tombol # ditekan stop:
setb P3.0
mov dptr,#menu3a ; rangkaian off acall line1
mov dptr,#blank acall line2 lcall delay_1_s lcall delay_1_s
loopl: ljmp loop
; =============================== pesan1: db ' FREQ. GENERATOR '
pesan2: db ' 20 - 42 Khz ' pesan3: db 'KENNEDY SUMARLIE' pesan4: db ' NRP:0322021 ' blank: db ' ' menu1: db ' MENU : 1->SETT ' menu2: db ' 2->AKTIF 3->END ' set1: db ' Freq. bwh: KHz ' set2: db ' Freq atas: KHz ' set3: db ' Interval: dtk ' menu2a: db ' RANGKAIAN AKTIF ' menu3a: db ' RANGKAIAN OFF ' freq: db ' Freq : KHz ' berhenti: db ' B E R H E N T I ' berhenti2: db ' TERIMAKASIH ' out: db ' FREQ : KHz ' end
LAMPIRAN C
●
LCD-016M002B
……… C-1
●
AT89S52
……… C-3
●
74LS00
………... C-14
●
L7800 SERIES :
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Permasalahan yang dialami oleh umat manusia sekarang ini bukan hanya
disebabkan oleh ulah manusia itu sendiri, melainkan turut disebabkan oleh
makhluk hidup lainnya. Dalam artian bahwa hewan juga turut menghambat
bahkan mengganggu manusia dengan segala eksistensinya. Sebagai salah satu
contoh adalah hewan pengerat (tikus). Menurut buku yang berjudul Frequency &
Hearing Capability oleh Dr. James Conroy (University of Smitfield-USA) [10],
rentang frekuensi pendengaran dari hewan pengerat (tikus) adalah di bawah 45
KHz. Dalam konteks yang demikian, maka dirancanglah sebuah alat elektronik
yang dapat menghasilkan frekuensi ultrasonik dengan jangkauan 20 KHz – 42
KHz, sehingga diharapkan dengan frekuensi yang demikian besarnya dapat
membuat hewan pengerat (tikus) bakal tidak betah di rumah, kantor, gudang,
pabrik, dan tempat tinggal lainnya. Alat ini dirancang untuk mengusir tikus dari
area yang rawan tikus ( misalnya daerah pertanian dan perkebunan ).
1.2.
Identifikasi Masalah
o
Bagaimana merancang sebuah alat elektronika yang mampu
membangkitkan frekuensi ultrasonik dengan jangkauan 20 KHz s/d 42
KHz ?
o
Bagaimana pengaruh alat pembangkit frekuensi itu terhadap pola tingkah
laku tikus putih ( diam / gelisah / mondar-mandir ) ?
1.3.
Maksud dan Tujuan
Membuat pembangkit frekuensi ultrasonik yang bergerak dari 20 KHz s/d 42
KHz dan dapat diatur intervalnya, serta mengamati (oleh manusia) tingkah
laku tikus putih terhadap perubahan pergerakan pada daerah frekuensi ini.
o
Labirin yang dibuat berukuran (1.2 x 0.6) m
2.
o
Tikus yang akan dijadikan sebagai objek percobaan adalah tikus mencit
putih (Musmusculus).
o
Frekuensi ultrasonik yang dihasilkan bergerak dari 20 KHz s/d 42 KHz.
o
Jumlah tikus yang akan diamati adalah 2 ekor tikus putih (jantan dan
betina).
1.5. Sistematika Penulisan
Agar dalam penulisan laporan Tugas Akhir ini lebih terarah dan teratur
serta terstruktur maka akan dibagi dalam :
BAB I
PENDAHULUAN
Berisi latar belakang, identifikasi masalah, maksud dan tujuan,
pembatasan masalah, dan sistematika penulisan.
BAB II
LANDASAN TEORI
Berisi tentang teori-teori yang menunjang dalam pembuatan alat,
yaitu ulasan mengenai mikrokontroler (AT89S52), power supply
yang digunakan (7805), keypad 4x4 sebagai input bagi alat, LCD
16x2 sebagai display, teori op-amp secara umum serta menjelaskan
mengenai gelombang ultrasonik selaku output dari transmitter
ultrasonik.
BAB III
PERANCANGAN
Berisi tentang rancangan pemasangan tiap komponen penunjang
terhadap port-port yang terdapat pada mikrokontroler (AT89S52).
Komponen penunjang yang dimaksud adalah keypad 4x4, LCD
16x2, buffer arus (74LS00) dan tweeter selaku pemancar
ultrasonik.
BAB IV
DATA PENGAMATAN DAN ANALISA
Berisi hasil pengamatan dan analisa terhadap alat yang telah
dirancang dalam hubungannya dengan tingkah laku tikus putih.
BAB V
KESIMPULAN DAN SARAN
Berisi kesimpulan dan saran.
Dari hasil pengamatan dan analisa dalam tugas akhir ini, dapat diambil kesimpulan
bahwa:
DAFTAR PUSTAKA
1.
Ayala, Kenneth J., “The 8051 Microcontroller : Architecture, Programming, &
Applications : Second Edition”, West, 1997
2.
Boylestad, Robert., Louis Nashelsky, “Electronic Devices and Circuit Theory :
Fifth Edition”, Prentice Hall International Editions, 1992
3.
Eko Putra, Agfianto, ”Belajar Mikrokontroler AT89C51/52/55 (Teori dan
Aplikasi)”, Gava Media, Yogyakarta, 2004
4.
Malik, Moh. Ibnu, “Belajar Mikrokontroler Atmel AT89S8252”,Gava Media,
Yogyakarta, 2003
5.
Pratomo. K, Andi, “Rangkaian Elektronik Praktis . Kendaraan. Rumah”,
Pustaka Pembangunan Swadaya Nusantara, Jakarta ,2004
6.
Setiawan, Rachmad, ”Mikrokontroler MCS-51”, Graha Ilmu, Yogyakarta,
2006
7.
Trisnobudi. Dr. Ir. Amoranto. Diktat Kuliah Ultrasonik. 2003
8.
Tutorial Pemrograman LCD, 21 November 2006
http://www.8052.com/tutlcd.phtml
9.
Vishay, ”Data sheet LCD 016M002B”, 11 September 2006
http://www.datasheet4u.com/html/L/C/D/LCD
016M002B_VishaySiliconix.pdf.html
10.
www.indonetwork.co.id, “Informasi mengenai Rentang Pendengaran
Frekuensi Hewan Pengerat (Tikus)“, 5 September 2006
http://www.indonetwork.co.id/HnF_InterAsia/